導彈二維加速度過載環境的離心轉盤模擬方法
2016-12-19 00:38:08張艷兵馬鐵華孫江濤
彈箭與制導學報 2016年4期
關鍵詞:環境
張艷兵,馬鐵華,孫江濤
(1 中北大學計算機與控制工程學院,太原 030051;2 中北大學電子測試技術國家重點實驗室,太原 030051;
?
導彈二維加速度過載環境的離心轉盤模擬方法
張艷兵1,2,馬鐵華1,2,孫江濤3
(1 中北大學計算機與控制工程學院,太原 030051;2 中北大學電子測試技術國家重點實驗室,太原 030051;
3 中國空空導彈研究院,河南洛陽 471009)
為了在實驗室條件下檢測導彈關鍵部件的抗過載能力,提出了一種離心轉盤模擬試驗方法。根據合成加速度的二維矢量分配原理,利用離心機帶動轉臂提供持續的動態加速環境;采用位置速度時間運動控制模式,利用轉盤對其合成加速度實時跟蹤和矢量分配,進行二維動態加速度的同步加載,實現導彈加速度過載環境的模擬。仿真和試驗結果表明了該方法的可行性和有效性。
加速度過載環境;離心機;矢量轉盤;模擬試驗
0 引言
導彈的加速度過載受氣動布局、發動機及彈體結構的約束,是衡量其機動性能和作戰能力的重要指標。為了在地面環境測試導彈關鍵部件的抗過載能力,就必須研究導彈加速度過載環境的模擬試驗方法。
在地面模擬試驗中,飛行姿態常用飛行仿真器進行模擬[1],加速度過載環境用離心機模擬[2]。但是普通離心機不能提供連續快速變化的二維動態過載加速度[3],飛行仿真器不能提供持續的加速環境[4],因此都無法應用于動態加速度過載環境的模擬試驗。
文中以離心機為主要載體,提供持續穩定的動態加速環境,同時用轉盤實現加速度的二維矢量分配,研究了導彈二維動態加速度過載環境的模擬試驗方法。
1 離心轉盤模擬系統的結構及原理
導彈的加速度過載通常用軸向過載加速度和法向過載加速度評定。軸向加速度越大,導彈的速度變化越快,就能更好的攻擊目標;法向加速度越大,在相同的速度下,導彈變向的能力就越大,機動性能就越好,現代先進的空空導彈最大法向過載可達70g。飛行過載環境模擬試驗要求試品的橫向加速度在0.5 s內由0加速到100g(最大),軸向加速度保持50g(最大)不變。導彈二維加速度過載環境的離心轉盤模擬試驗裝置如圖1所示,包括離心機和轉盤兩大部分。離心機由調速電機驅動轉臂加速旋轉,提供合成加速度;轉盤由電機驅動,控制試品的轉角,進行矢量分配。試品被固定在轉盤上,轉盤圓心與轉臂中心相距1 m。轉盤的方向設定如圖2所示。
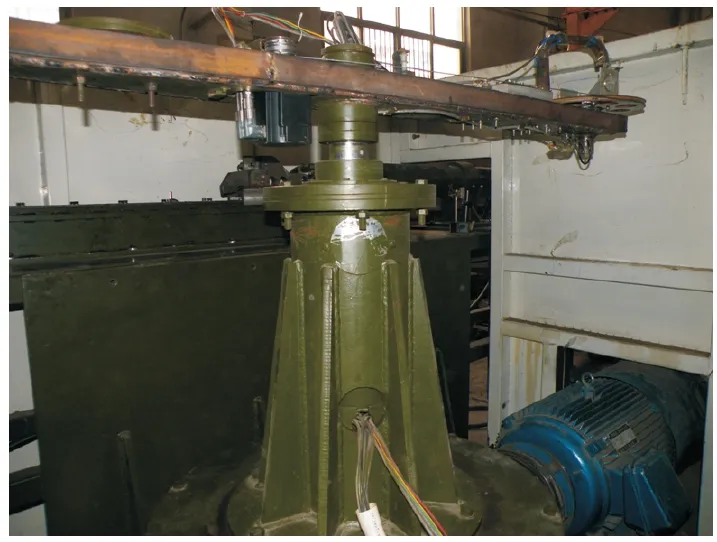
圖1 離心轉盤模擬試驗裝置
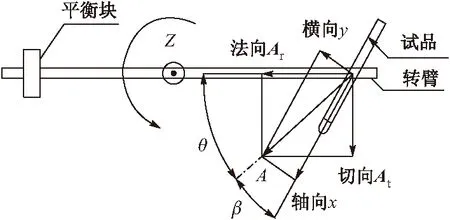
圖2 轉盤的方向設定
轉臂旋轉時,切向加速度、法向加速度、合成加速度分別為:
(1)
式中:At、Ar、A分別為轉臂的切向、法向及合成加速度;ω為轉臂的角速度;r=1 m為轉盤圓心與轉臂中心的距離。
根據二維矢量分配原則,合成加速度可以分解至試品的軸向和橫向,由圖2可知:
(2)
式中:φ為試品的矢量軸轉角;Ax、Ay分別為試品軸向和橫向加速度。
因此離心機旋轉時,通過轉盤調節試品的矢量軸轉角,把轉臂的合成加速度矢量分配為試品的二維加速度,即可滿足導彈過載環境的模擬試驗要求。
2 控制系統結構
模擬試驗系統控制框圖如圖3所示,包含離心機控制回路、轉盤控制回路和二維加速度測試回路。離心機由變頻電機驅動,對轉臂進行調速,電機和轉臂之間的減速比為2∶1;轉盤和伺服電機固定在轉臂上,由伺服電機進行軸角控制,電機軸和轉盤之間傳動比為7∶1;試品固定在轉盤上,其過載加速度通過加速度傳感器反饋給計算機。旋轉部件上的控制信號及測試信號通過滑環進行傳輸。
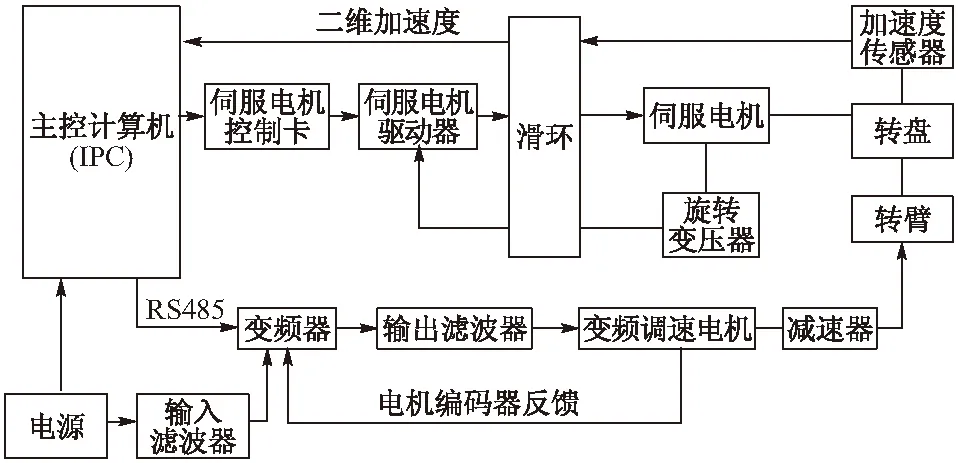
圖3 模擬試驗系統控制框圖
3 系統設計的幾個關鍵問題
3.1 試驗系統工作狀態的設定
試品的初始軸向加速度為50g,橫向加速度為0,此時試品的軸向指向轉臂中心,其軸向與轉臂的法向重合,橫向與轉臂的切向重合。離心機勻速旋轉,產生50g的法向加速度,切向加速度為0,因此:
(3)
離心機轉臂的角速度ω1為22.14 rad/s。
0.5 s后穩態飛行時,離心機勻速旋轉,試品的橫向加速度為100g,軸向加速度為50g,轉臂的法向加速度、切向加速度為:
(4)
離心機轉臂的角速度ω2為33.1 rad/s。
試品矢量軸轉角為:
φ
3.2 系統各部分轉動慣量的計算
轉軸的總轉動慣量:
J轉軸系=37.553 5 kg·m2
變頻調速電機軸系部分總的轉動慣量:
J離心軸承=0.627 7 kg·m2
變頻電機軸和轉軸的減速比i1=2,因此折算到變頻調速電機軸上的轉動慣量為:
轉盤軸系總的轉動慣量:
J轉盤軸系=0.085kg·m2
伺服電機軸系總轉動慣量:
J伺服軸系=6.5×10-4kg·m2
減速比i2=7,因此折算到伺服電機軸上總的轉動慣量:
=2.385×10-3kg·m2
3.3 變頻電機的選擇

因此可以選擇極對數為4,功率37kW的三相異步調速電機,其額定轉矩為470N·m,額定轉速為750r/min。
3.4 伺服電機的跟蹤能力
由式(2)得到試品矢量軸轉角曲線如圖4所示。一次微分和二次微分后得到試品的角速度及角加速度曲線如圖5和圖6所示。
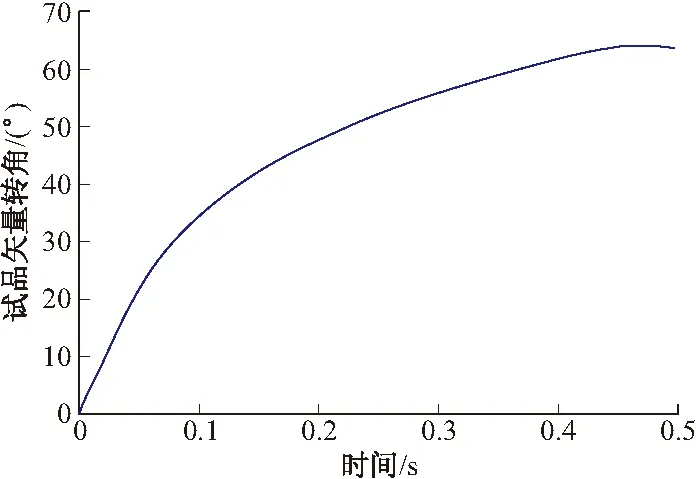
圖4 試品矢量軸轉角仿真曲線
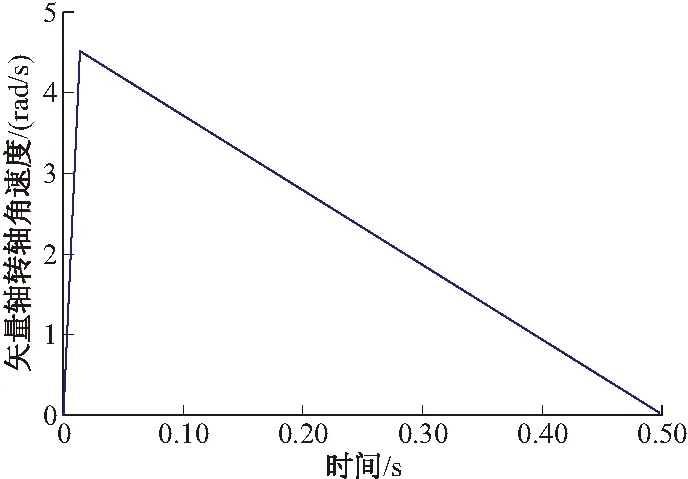
圖5 試品矢量軸轉角速度曲線
伺服電機輸出扭矩為:
T伺服電機=J伺服電機軸·7α試件軸角
(5)
伺服電機扭矩加載曲線如圖7所示。
試品在0.5s內旋轉63.43°,角加速度的最大值為389.34rad/s2,伺服電機輸出最大扭矩為6.5N·m,因此選擇三相永磁交流同步伺服電機,其連續轉矩為8.6N·m,峰值轉矩位21.9N·m,最大轉速為6 000r/min,伺服電機完全能夠響應。
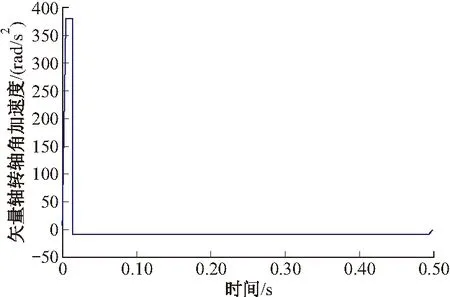
圖6 試品矢量軸轉角加速度曲線

圖7 伺服電機扭矩加載曲線
3.5 試品矢量軸轉角位移的控制
試品矢量軸轉角的控制決定了試品二維過載加速度的精度。為了提高轉盤的跟蹤能力,本系統通過運動控制卡(PMAC)執行運動控制程序,以PVT(位置速度時間)運動模式,通過伺服電機控制軸角位移。PMAC在每個伺服環內,根據規劃好的軌跡計算新的指令位置,輸出±10V的模擬量信號。
PVT運動模式把矢量軸轉角曲線按照控制精度分成多個小段,每段的位置運動規律用兩點三次Hermite插值多項式擬合[6]:
(6)
式中:P是每段的位置;V是每段的速度。
只需根據圖4和圖5指定段點位置,速度和運行時間,控制卡會計算滿足約束條件的每段的運動軌跡,對軸角位移進行更緊湊的控制。
4 現場模擬試驗
本系統在某導彈慣性部件的二維動態加速度過載環境模擬試驗中已經成功應用,設定導彈的軸向加速度為20g,橫向加速度在0.5 s內由0加速到40g,實測的加速度曲線如圖8所示。從圖8可以看出,試件的橫向加速度在494 ms內從0達到40g,而軸向加速度為20g,控制誤差在±3%以內,較好的模擬了導彈的二維動態加速度過載環境。
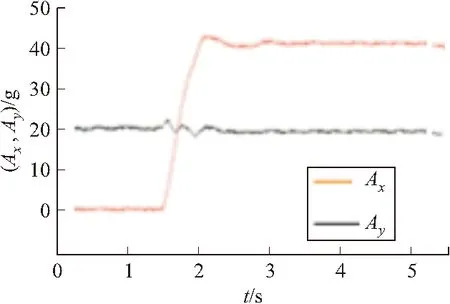
圖8 實測二維加速度曲線
5 結論
文中依據合成加速度的二維矢量分配原理,提出了離心轉盤模擬試驗方法,用離心機提供持續的動態加速環境,同時用伺服電機帶動轉盤,模擬導彈的二維動態加速度過載環境。實測結果表明:該模擬試驗系統在500 ms內建立所需的加速度,滿足模擬試驗的要求,為導彈關鍵部件的地面模擬試驗提供了實用化的平臺。
[1] WU D S, GU H B. Adaptive sliding control of six-DOF flight simulator motion platform [J]. Chinese Journal of Aeronautics, 2007, 20(5): 425-433.
[2] 吳建國, 李海波, 張琪, 等. 綜合離心環境試驗技術研究進展 [J]. 強度與環境, 2014, 41(1): 1-9.
[3] 馬杰, 姚郁. 一種新型動態飛行過載模擬器及其運動學分析 [J]. 系統仿真學報, 2009, 21(z2): 112-114.
[4] 劉力, 劉興堂. 空中飛行模擬技術及其應用 [J]. 計算機仿真, 2005, 22(10): 51-54.
[5] 徐周, 李建峰. 基于PCI04的天線轉臺伺服系統設計 [J]. 電子機械工程, 2014, 30(1): 61-64.
[6] LEKKAS A M, FOSSEN T I. Integral LOS path following for curved paths based on amonotone cubi-chermite spline parametrization [J]. IEEE Transactions on Control Systems Technology, 2014, 22(6): 2287-2301.
Simulation Method of Two-dimensional Acceleration Overload Environment for Missiles Based on Turntable and Centrifuge
ZHANG Yanbing1,2,MA Tiehua1,2,SUN Jiangtao3
(1 School of Computer Science and Control Engineering, North University of China, Taiyuan 030051, China; 2 National Key Laboratory for Electronic Measurement Technology, North University of China, Taiyuan 030051, China; 3 China Airborne Missile Academy, Henan Luoyang 471009, China)
To test anti-overload ability of missile key components under laboratory conditions, a test method based on a turntable and a centrifuge was proposed. According to the vector distribution principle of synthetic acceleration, the continuous dynamic acceleration environment was reproduced by the centrifuge. The real-time tracking and vector distribution of synthetic acceleration were achieved by the turntable based on the motion control mode of position-velocity-time. A two-dimensional dynamic acceleration was loaded synchronously, therefore, the acceleration overload environment for missiles was simulated. The results of simulation and experiment demonstrate feasibility and effectiveness of the proposed method in this paper.
acceleration overload environment; centrifuge; vector turntable; simulation test
2015-08-25
重點實驗室基金資助
張艷兵(1973-),男,漢,山西臨猗人,副教授,博士研究生,研究方向:動態測試與智能控制。
TP273
A
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
瘋狂英語·新策略(2019年9期)2019-10-17 01:51:34
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
濰坊學院學報(2017年2期)2017-04-20 08:44:31
中國環境監察(2016年5期)2016-10-24 05:25:52
中國商論(2016年33期)2016-03-01 01:59:38
