基于FSR的假肢手抓握力控制*
2016-12-17 05:11:59鄧小保段小剛
傳感器與微系統(tǒng) 2016年12期
鄧小保, 段小剛, 鄧 華
(中南大學(xué) 高性能復(fù)雜制造國(guó)家重點(diǎn)實(shí)驗(yàn)室,湖南 長(zhǎng)沙 410083)
?
基于FSR的假肢手抓握力控制*
鄧小保, 段小剛, 鄧 華
(中南大學(xué) 高性能復(fù)雜制造國(guó)家重點(diǎn)實(shí)驗(yàn)室,湖南 長(zhǎng)沙 410083)
為了幫助上肢殘疾者穩(wěn)定抓取日常物品,提出了一種基于力敏電阻(FSR)的假肢手抓握力控制方法。FSR采集假肢手抓取力,并根據(jù)抓握力及其梯度,建立了假肢手抓握力模糊估計(jì)模型。然后將模糊控制器應(yīng)用于假肢手抓握力控制,并采用試湊法得到模糊控制參數(shù)的值。假肢手抓握實(shí)驗(yàn)表明:所提出的基于FSR假肢手期望抓握力的估計(jì)和抓握力控制的方法是有效的。
假肢手; 力敏電阻; 模糊控制
0 引 言
人在抓握物體前,大腦根據(jù)物體特征估計(jì)一個(gè)合適的抓握力,并通過(guò)神經(jīng)系統(tǒng)發(fā)出抓握指令。人手的神經(jīng)系統(tǒng)在接到指令后控制骨骼肌收縮,從而實(shí)現(xiàn)穩(wěn)定抓握物體。對(duì)假肢手而言,若要實(shí)現(xiàn)與人手相似的穩(wěn)定抓握,需要一個(gè)合適的抓握力及合理的控制策略。如果抓握力過(guò)大,可能導(dǎo)致物體變形甚至破壞;相反,如果抓握力過(guò)小,可能抓不住物體,導(dǎo)致物體掉落,所以合適的抓握力對(duì)于穩(wěn)定抓握十分重要。同時(shí),合理的控制策略,能夠?qū)崿F(xiàn)假肢手抓握力穩(wěn)定控制。
目前肌電信號(hào)、腦電信號(hào)解碼獲取假肢手期望抓握力的方法還不成熟,不能直接得到合適的抓握力。另外,假肢手由小電機(jī)帶動(dòng)減速機(jī)構(gòu)驅(qū)動(dòng),存在間隙,摩擦等非線性問(wèn)題,線性控制的方法如傳統(tǒng)PID控制很難獲得好的控制效果。
文獻(xiàn)[1~3]對(duì)從肌電信號(hào)中獲得假肢手期望抓握力進(jìn)行了探討,但是其算法復(fù)雜,在線控制比較難,長(zhǎng)時(shí)間采集還會(huì)引起肌肉疲勞。文獻(xiàn)[4]中,采用阻抗控制的方法,但只能通過(guò)調(diào)整參考位置來(lái)間接地實(shí)現(xiàn)抓握力控制。文獻(xiàn)[5]中,Engeberg E D在假定參考力得到的前提下,對(duì)假肢手力和位置做了滑模控制等研究,但并未對(duì)如何得到參考力做相應(yīng)討論。當(dāng)前商業(yè)假肢手主要利用表面肌電信號(hào)的幅值,并對(duì)其進(jìn)行閾值控制,即肌電信號(hào)大于某個(gè)值時(shí),假肢手就開(kāi)始抓握,小于時(shí)就松開(kāi),實(shí)現(xiàn)假肢手的開(kāi)—合動(dòng)作。這一控制方法在Otto Bock的假肢手[6]中得到應(yīng)用。
由于人根據(jù)物體特征憑經(jīng)驗(yàn)獲得一個(gè)抓握力是個(gè)模糊的過(guò)程。模糊控制器規(guī)則簡(jiǎn)單,具有良好的魯棒性,能解決假肢手非線性以及被抓握物體的不確定性等問(wèn)題[7]。此外,由于力敏電阻(FSR)安裝方便,體積小,精度高且價(jià)格便宜,因此,本文提取基于FSR的假肢手抓握力控制策略。通過(guò)分析FSR接觸不同物體時(shí)的變化規(guī)律,建立基于模糊規(guī)則庫(kù)的假肢手期望抓握力的估計(jì)方法。考慮到假肢手的非線性問(wèn)題,采用模糊控制方法,設(shè)計(jì)了假肢手抓握力控制器。最后,用三組不同物體分別采用模糊控制與傳統(tǒng)PID控制進(jìn)行對(duì)比實(shí)驗(yàn),驗(yàn)證該控制方法的有效性。
1 假肢手控制策略
人能夠很好地控制自己的手抓握不同的物體,具有很好的適應(yīng)性。因此,提出一種仿人控制策略來(lái)實(shí)現(xiàn)假肢手的抓握力控制。人手在抓握物體時(shí),首先通過(guò)眼睛看到被抓握物體,根據(jù)經(jīng)驗(yàn)估計(jì)一個(gè)合適的抓握力,然后通過(guò)神經(jīng)系統(tǒng)控制人手驅(qū)動(dòng)器—骨骼肌實(shí)現(xiàn)不同物體的抓握,其基本原理如圖1所示。

圖1 人手抓握的控制示意圖Fig 1 Schematic diagram of human hand grip control
采用期望力模糊估計(jì)來(lái)實(shí)現(xiàn)假肢手抓握不同物體的功能。基于人手抓握的控制原理,提出了假肢手抓握力控制策略,如圖2所示,其中f為假肢手的抓握力,fd為期望的抓握力。根據(jù)FSR信號(hào)估計(jì)期望抓握力,以模糊控制模擬人的神經(jīng)控制。

圖2 假肢手抓握力控制示意圖Fig 2 Grip force control of prosthetic hands
2 假肢手的數(shù)學(xué)模型
設(shè)計(jì)控制器時(shí),需要考慮假肢手的動(dòng)態(tài)響應(yīng)特征。本文考慮單自由度假肢手的情況,其動(dòng)態(tài)模型如下
(1)


(2)

將式(2)代入式(1)得到

(3)
建模的過(guò)程中可知,假肢手與被抓物體接觸點(diǎn)不同時(shí),會(huì)引起L(q)與J變化,模型(3)的參數(shù)發(fā)生變化;被抓握物體變化時(shí),其剛度、阻尼與粘性系數(shù)發(fā)生變化,即K,B與M變化,模型(3)的動(dòng)態(tài)響應(yīng)特征也發(fā)生變化。模型存在非線性,采用PID算法控制很難達(dá)到穩(wěn)定抓握的控制要求,本文采用模糊控制策略,實(shí)現(xiàn)假肢手抓握力的穩(wěn)定控制。
3 期望抓握力模糊估計(jì)模型
人在抓握物體時(shí),根據(jù)被抓物體的大小、形狀、特征等,憑經(jīng)驗(yàn)估計(jì)抓握力是一個(gè)模糊過(guò)程。所以,采用一個(gè)模糊模型來(lái)實(shí)現(xiàn)假肢手的抓握力估計(jì)。如圖3所示,其中f為假肢手的抓握力,fd為假肢手期望的抓握力,k1,k2和k3為比例系數(shù)。抓握力模糊估計(jì)模型的設(shè)計(jì)如下:
1)隸屬度函數(shù)設(shè)計(jì)。針對(duì)軟硬程度不同的物體,采用假肢手抓握力和抓握力梯度的變化情況來(lái)設(shè)計(jì)隸屬度函數(shù)。以紙杯子、塑料瓶和硬瓶子的抓握力為模糊集的劃分依據(jù)。假肢手抓握力的測(cè)量數(shù)據(jù),如圖4所示,根據(jù)這三種情況的抓握力的大小和抓握力梯度變化確定模糊集隸屬度函數(shù)的中心,隸屬度函數(shù)如圖5所示。

圖3 假肢手抓握力模糊估計(jì)模型Fig 3 Fuzzy estimation model for grip force prosthetic hands
2)規(guī)則庫(kù)設(shè)計(jì)。模糊規(guī)則設(shè)計(jì)為“IfEf小與Rf中等,則fd小”。模糊規(guī)則如表1所示。

圖4 假肢手接觸力與力的導(dǎo)數(shù)Fig 4 Force and its gradient of prosthetic hands
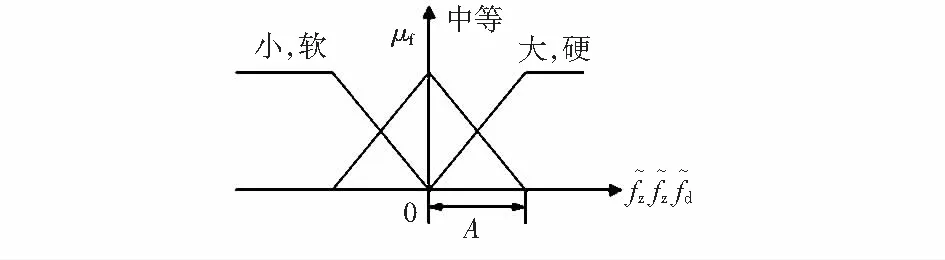
圖5 輸入輸出隸屬度函數(shù)Fig 5 Input and output membership function

力梯度不同抓握力下的規(guī)則小中大軟小小中中等小中大硬中大大
3)推理機(jī)制與解模糊化,采用經(jīng)典的Mandani推理機(jī)制,解模糊化采用重心法。
基于上述的模糊邏輯系統(tǒng),采用圖形法,可以推導(dǎo)出抓握力模糊估計(jì)模型的數(shù)學(xué)表達(dá)式
(4)
g(σ)=k(1-γ)+γσ
σ=Ef+Rf=k1Ef+k2Rf
(5)

4 假肢手抓握力控制器設(shè)計(jì)
模糊邏輯具有優(yōu)越的處理不確定和非線性問(wèn)題的能力,因此,提出一種模糊控制方法來(lái)實(shí)現(xiàn)假肢手的抓握力控制。模糊控制器的結(jié)構(gòu)如圖6所示,其中誤差e=fd-f,fd為假肢手期望的抓握力,f為假肢手實(shí)際抓握力;Ke,Kd,K0及K1為比例系數(shù);UFz為控制器輸出。
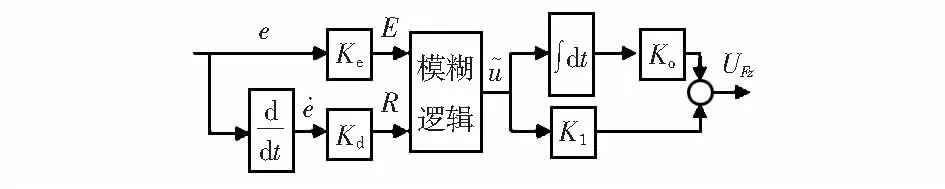
圖6 模糊控制器Fig 6 Fuzzy controller


圖7 模糊控制器的隸屬度函數(shù)Fig 7 Membership function of fuzzy controller
5 實(shí) 驗(yàn)
將上述主模式控制方法應(yīng)用于單自由度假肢手,采樣頻率為500 Hz,FSR貼在(硅膠手套表面)假手拇指指尖,如圖8。采用DSP芯片TMS320F28335作為處理核心,實(shí)驗(yàn)中對(duì)比了PID控制算法和模糊控制算法。采用試湊法得到各組參數(shù),如表2所示。

表2 控制器參數(shù)值
實(shí)驗(yàn)采用如下幾個(gè)步驟:
1)在自由運(yùn)動(dòng)空間,以一定恒定電壓驅(qū)動(dòng)(u=1.5 V)手指運(yùn)動(dòng);
2)在約束空間(手指接觸物體),采用u0=1 V的初始電壓,采集接觸到物體后100 ms的FSR信號(hào),計(jì)算該物體的力和力的導(dǎo)數(shù),并通過(guò)抓握力模糊估計(jì)模型估計(jì)期望的抓握力;
3)抓握力控制器控制假肢手實(shí)現(xiàn)穩(wěn)定抓握。
實(shí)驗(yàn)中分別抓握硬瓶子、塑料瓶及紙杯子,先使用模糊估計(jì)期望抓握力,再分別采用模糊控制器和傳統(tǒng)PID進(jìn)行控制,其控制效果如圖9、圖10、圖11所示。

圖8 單自由度假肢手實(shí)驗(yàn)平臺(tái)Fig 8 Experimental platform of single DOF prosthetic hand

圖9 單自由度假肢手抓握硬杯子實(shí)驗(yàn)Fig 9 Experiment of single DoF prosthetic hand grips hard cup

圖10 單自由度假肢手抓握塑料瓶實(shí)驗(yàn)Fig 10 Experiment of single DOF prosthetic handgrips plastic bottle
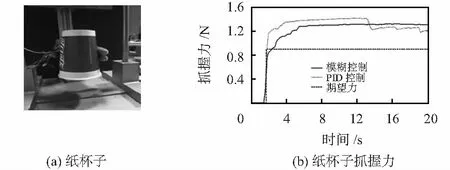
圖11 單自由度假肢手抓握紙杯實(shí)驗(yàn)Fig 11 Experiment of single DoF prosthetichand grips paper cup
從實(shí)驗(yàn)結(jié)果可以看出:接觸物體后,控制器會(huì)得到一個(gè)大致的期望抓握力,軟杯子的估計(jì)期望力和實(shí)際控制抓握力有約0.4N的誤差,但是不影響穩(wěn)定抓握,軟杯子既沒(méi)有變形,也沒(méi)有滑落。塑料瓶和硬瓶子的期望力和控制力大致吻合,假肢手可以穩(wěn)定抓握。以上說(shuō)明模糊估計(jì)期望抓握力的方法是有效的。從控制效果來(lái)看,PID控制相對(duì)模糊控制,其抓握力控制不穩(wěn)定,對(duì)較硬的物體,超調(diào)量較大。模糊控制的方法超調(diào)量小、調(diào)整時(shí)間短、穩(wěn)態(tài)誤差小。
6 結(jié)束語(yǔ)
為能使假肢手穩(wěn)定抓握不同物體,本文提出的基于FSR的假肢手抓握力控制策略。利用FSR采集的力信號(hào),得到不同的物體的抓握力信息,建立的初始抓握力的規(guī)則庫(kù),得到模糊估計(jì)期望力的模型,從而為穩(wěn)定抓握物體提供了一個(gè)參考力。針對(duì)假肢手的非線性和抓握物體的不確定性,采用模糊控制的方法,能有效控制抓握力的大小。
[1] 楊大鵬,趙京東,姜 力,等.多抓取模式下人手握力的肌電回歸方法[J].哈爾濱工業(yè)大學(xué)學(xué)報(bào),2012,44(1):83-87.
[2] Shahrul Naim Sidek,Ahmad Jazlan Haja Mohideen.Mapping of EMG signal to hand grp force at varying wrist angles[C]∥2012 IEEE International Conference on Biomedical Engineering and Sciences,IECBES 2012,Langkawi,2012:648-653.
[3] Duque J,Masset D,Malchaire J.Evaluation of handgrip force from EMG measurements[J].Applied Ergonomics,1995,26:61-66.
[4] 孫金鳳,姜 力.基于關(guān)節(jié)力矩傳感器的靈巧手指的阻抗控制[J].傳感器與微系統(tǒng),2008,27(7):66-68,74.
[5] Engeberg E D,Meek S G,Minor M A.Hybrid force-velocity sli-ding mode control of a prosthetic hand[J].IEEE Transactions on Biomedical Engineering,2008,55:1572-1581.
[6] Online.Otto bock sensor hand speed[EB/OL].(2013—08—26)http:∥www.ottobock.com/cps/rde/xchg/ob_com_en/hs.xsl/54026.html.
[7] Duan X G,Li H X,Deng H.Robustness of fuzzy PID controller due to its inherent saturation[J].Journal of Process Control,2012,22:470-476.
Grip force control of prosthetic hands based on FSR*
DENG Xiao-bao, DUAN Xiao-gang, DENG Hua
(State Key Laboratory of High Performance and Complex Manufacturing,Central South University,Changsha 410083,China)
In order to help amputees grasp everyday objects stably,a force estimation method is presented for prosthetic hands based on force sensitive resistors(FSR).Grasping force signal is obtained by FSR,and analysis the force and its gradient signal to the different objects.A grip fuzzy estimation model is established.Fuzzy controller is applied to control the prosthetic and its parameters are obtains by cut-and-trial.Experimental results of prosthetic hand show that the proposed method about desired grip force estimation based on FSR and grip force control is effective.
prosthetic hands; force sensitive resistors(FSR); fuzzy control
10.13873/J.1000—9787(2016)12—0096—03
2016—02—24
國(guó)家“973”計(jì)劃資助項(xiàng)目(2011CB013302)
TP 241.3
A
1000—9787(2016)12—0096—03
鄧小保(1990-),男,湖南邵陽(yáng)人,碩士研究生,研究方向?yàn)橹悄芸刂啤鞲衅鲬?yīng)用、嵌入式系統(tǒng)。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
能源工程(2020年6期)2021-01-26 00:55:22
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34