用于機(jī)車測速的雷達(dá)傳感器算法研究*
2016-12-17 05:11:57王東峰
傳感器與微系統(tǒng) 2016年12期
關(guān)鍵詞:信號(hào)
李 萌, 曹 林, 王東峰
(1.北京信息科技大學(xué) 信息與通信工程學(xué)院,北京 100101;2.北京川速微波科技有限公司,北京 100080)
?
用于機(jī)車測速的雷達(dá)傳感器算法研究*
李 萌1, 曹 林1, 王東峰2
(1.北京信息科技大學(xué) 信息與通信工程學(xué)院,北京 100101;2.北京川速微波科技有限公司,北京 100080)
用于機(jī)車測速的多普勒雷達(dá)傳感器的天線波束方向與地面實(shí)際夾角隨著機(jī)車的震動(dòng)會(huì)發(fā)生改變,導(dǎo)致雷達(dá)測速傳感器測量的速度值與機(jī)車實(shí)際速度存在一定偏差,雙天線雷達(dá)測速傳感器采用雙天線結(jié)構(gòu),利用兩片天線的角度關(guān)系及兩片天線所接收信號(hào)的能量大小自動(dòng)校正天線波束與地面夾角。通過Matlab分析數(shù)據(jù)與實(shí)際測試,角度修正后的雷達(dá)傳感器系統(tǒng)速度測量值更接近機(jī)車真實(shí)速度。
機(jī)車測速; 雷達(dá)傳感器; 雙天線; 角度修正
0 引 言
雷達(dá)測速傳感器采用非接觸方式,利用微波信號(hào)相對(duì)于地面的速度多普勒效應(yīng)[1]。因?yàn)殡姶挪ㄔ诓煌h(huán)境下的傳播速度幾乎不變,而且受天氣影響較小,使這種方法具有很高的可靠性和穩(wěn)定性[2]。但由于火車在行進(jìn)過程的不斷振動(dòng),使雷達(dá)天線與地面的夾角θ的大小隨之發(fā)生變化,導(dǎo)致雷達(dá)測速傳感器的準(zhǔn)確度大大降低[3]。
文獻(xiàn)[4]通過采用雙微波模塊多AD采樣、不同工況下多種工作模式相互轉(zhuǎn)換的設(shè)計(jì)思想以解決誤差和穩(wěn)定性的問題。文獻(xiàn)[5]提出多傳感器融合定位方式,適用于城市軌道交通的慣性導(dǎo)航系統(tǒng)、里程計(jì)、以及信標(biāo)的組合定位方法。文獻(xiàn)[6]通過一種基于自適應(yīng)卡爾曼濾波的方法提高雷達(dá)的測速精度。
本文提出采用雙天線的方式,通過角度自適應(yīng),實(shí)時(shí)地對(duì)夾角θ進(jìn)行校正,降低由于機(jī)車振動(dòng)引起的測量誤差,提高雷達(dá)測速傳感器的測速精度。
1 系統(tǒng)結(jié)構(gòu)
機(jī)車多普勒測速雷達(dá)在實(shí)現(xiàn)上有兩種方式,一種是天線同向,另一種是天線異向,圖1所示為在機(jī)車上實(shí)驗(yàn)過的連續(xù)波測速雷達(dá)的系統(tǒng)結(jié)構(gòu)框圖。為了能夠消除由于角度偏差所帶來的測速誤差,采用雙天線四通道的結(jié)構(gòu),通過兩部天線測出的多普勒頻率fd的差異求出實(shí)際波束方向角α。雷達(dá)發(fā)射頻率為24.15 GHz。系統(tǒng)將處理后得到的速度結(jié)果通過串口傳送到計(jì)算機(jī)的控制系統(tǒng)。與此同時(shí),經(jīng)過校準(zhǔn)的光電測速儀的測速測距結(jié)果也將存儲(chǔ)在計(jì)算機(jī)內(nèi)作為衡量多普勒雷達(dá)性能的參考標(biāo)準(zhǔn)。在實(shí)際應(yīng)用中,考慮了采用角度自適應(yīng)矯正的方法來消除由于角度偏差所引起的測速偏差。
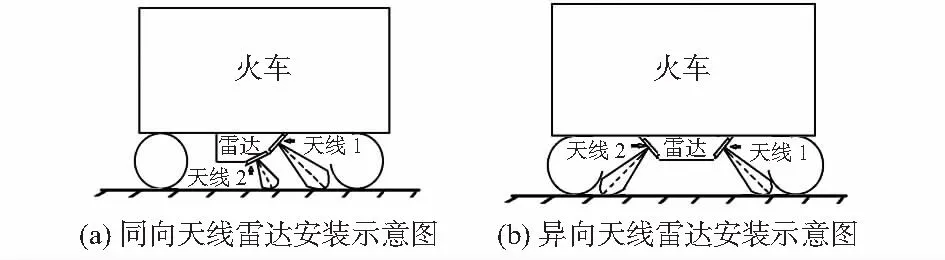
圖1 系統(tǒng)結(jié)構(gòu)框圖Fig 1 Block diagram of system structure
2 角度自修正算法
雷達(dá)測速傳感器的工作原理是利用多普勒效應(yīng),安裝在機(jī)車上的雷達(dá)天線向地面發(fā)射固定頻率的電磁波,并接收從地面反射回來的信號(hào),由于火車處于運(yùn)動(dòng)狀態(tài),導(dǎo)致發(fā)射信號(hào)與接收信號(hào)存在一個(gè)頻率差,即為多普勒頻率fd,其與機(jī)車運(yùn)動(dòng)速度的關(guān)系式如下[4]
(1)
式中 v為機(jī)車運(yùn)動(dòng)速度,c為光速,f0為雷達(dá)發(fā)射頻率,θ為雷達(dá)天線與地面的夾角。
2.1 以同向天線
如圖1中(a)所示雷達(dá)安裝后,天線1實(shí)際與地面的夾度為θ1,天線2實(shí)際與地面的夾角為θ2,由于安裝在雷達(dá)上的雙天線具有固定的角度差,設(shè)其為Δθ,則θ1和θ2的關(guān)系為
θ2-θ1=Δθ
(2)
兩天線接收到的多普勒頻移分別用fd1,fd2表示,通過式(1)可知天線1和天線2所計(jì)算的速度分別為
(3)
(4)
由于兩路天線安裝在同一個(gè)雷達(dá)傳感器上,用于測量機(jī)車速度,理想情況下
v=v1=v2
(5)

由此可得
(6)
由式(6)可得出
(7)
(8)
因此,根據(jù)式(6)得出真實(shí)速度
(9)
2.2 當(dāng)天線異向時(shí)
如圖1(b)所示,其算法原理與同向天線類似,不同之處在于,兩天線的角度和為定值(同向天線為角度差),即
θ1+θ2=θsum
(10)
其公式推理過程與上相似,最后可得出
(11)
對(duì)比式(9)和式(11)可知,兩種雷達(dá)的公式可以通用,不同之處僅在于天線異向的雷達(dá)公式中用的是角度和θsum,而天線同向的雷達(dá)公式中用的是角度差Δθ。
3 測試與仿真分析
利用雷達(dá)樣機(jī)采集大量數(shù)據(jù),其中同向天線雷達(dá)樣機(jī)的兩角度差為15°,異向天線雷達(dá)樣機(jī)的兩角度和為90°。雷達(dá)工作周期為26.24 ms,即每26.24 ms采集一個(gè)樣本數(shù)據(jù),每個(gè)樣本數(shù)據(jù)有1 024點(diǎn)。圖2(a)為異向天線雷達(dá)時(shí)域數(shù)據(jù)樣本和快速傅里葉變換(FFT)后的頻域信號(hào),圖2(b)為同向天線雷達(dá)時(shí)域數(shù)據(jù)樣本和FFT后的頻域信號(hào)。經(jīng)過大量采集數(shù)據(jù)樣本,并仿真分析對(duì)比數(shù)據(jù),可以觀察到,在不考慮角度偏差時(shí),直接根據(jù)多普勒原理計(jì)算出的速度跳變較大,不夠穩(wěn)定;而通過自適應(yīng)修正方法修正后得出的速度相對(duì)穩(wěn)定,更接近真實(shí)速度。如圖3中(a),(b)所示,由圖中數(shù)據(jù)可見,實(shí)驗(yàn)中角度修正后的速度更接近真實(shí)速度。

圖2 兩種雷達(dá)時(shí)域數(shù)據(jù)樣本與FFT變換后的信號(hào)Fig 2 Time domain data samples of two kinds of radar andsignal after FFT transform
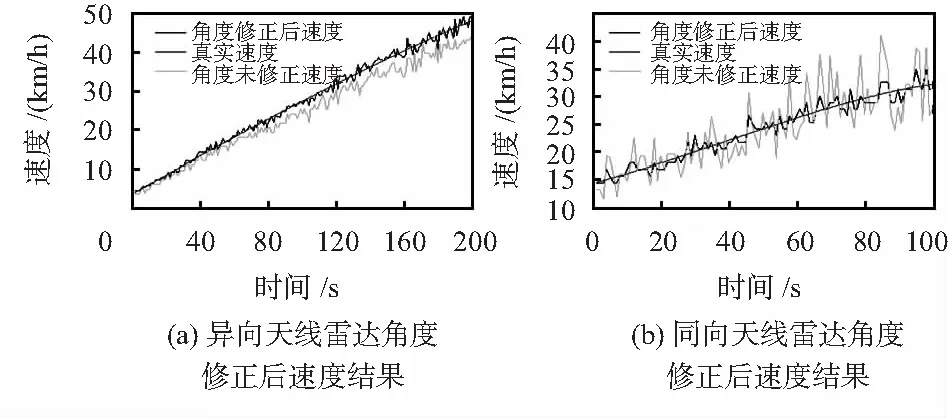
圖3 兩種雷達(dá)角度修正后速度對(duì)比結(jié)果Fig 3 Speed comparison results of two kinds of radarwith angle correction
同向天線雷達(dá)共有1#~4#樣機(jī),異向天線雷達(dá)有2臺(tái)樣機(jī),測試時(shí)通過進(jìn)行錄制視頻,對(duì)比統(tǒng)計(jì)測試結(jié)果,可知異向天線雷達(dá)的速度比同向天線雷達(dá)的速度更接近真實(shí)速度。具體統(tǒng)計(jì)結(jié)果見表1。
在機(jī)車測速中激光測速的精度最高,其工作在紅外和可見光波段。誤差在1 km/h以內(nèi),而本算法中的異向天線雷達(dá)測速誤差也在1 km/h以內(nèi)[6],但激光測速儀只能在靜止?fàn)顟B(tài)下應(yīng)用,不能以車載的動(dòng)態(tài)模式工作,所以,無法對(duì)機(jī)車進(jìn)行實(shí)時(shí)測速。

表1 同向天線雷達(dá)與異向天線雷達(dá)速度偏差對(duì)比
4 結(jié)束語
這種雙天線測速的方法只需要在單天線雷達(dá)上增加一個(gè)低成本天線即可,2套天線的信號(hào)送入同一信號(hào)處理器進(jìn)行檢測和融合,不僅提高了測量精度,而且雙天線互為冗余,提高了系統(tǒng)整體的可靠性。
連續(xù)波多普勒雷達(dá)測量機(jī)車速度時(shí),天線角度偏差直接影響到了測速的精度。采用角度自修正方法,在可能出現(xiàn)的角度偏差范圍內(nèi),能夠以很小的計(jì)算量有效解決角度偏差問題。
[1] Kakuschke Chris.Numerical analysis methods of microwave Doppler signal in vehicle speed measuring in railway syste-m[D].Chemnitz:University Chemniz-Zwickau,2003.
[2] 戴 斌,高 劍,張博君,等.雷達(dá)電磁兼容試驗(yàn)若干問題解決方法[J].火控雷達(dá)技術(shù),2008,3(1):101-103.
[3] 鄧 超. 多傳感器定位在高速鐵路的應(yīng)用[J]. 鐵道通信信號(hào),2006, 42 (12):28-29.
[4] 唐 偉, 孫志芳, 陳 全.基于DSP的車載雷達(dá)測速系統(tǒng)設(shè)計(jì)[J].自動(dòng)化技術(shù)與應(yīng)用,2006,25 (7):20-21.
[5] 李宏偉.雷達(dá)測速傳感器及其測試系統(tǒng)研究[D].武漢:華中科技大學(xué),2013.
[6] 郭華真.多傳感器融合列車測速定位技術(shù)的研究[D].北京:北京交通大學(xué),2013.
[7] 姬冰冰,買培培,蘇 濤.一種基于卡爾曼濾波的機(jī)車測速雷達(dá)算法[J]. 火控雷達(dá)技術(shù),2009,38(1):43-47.
曹 林,通訊作者,E—mail:charlin26@163.com。
Algorithm study of radar sensor for locomotive speed measuring*
LI Meng1, CAO Lin1, WANG Dong-feng2
(1.College of Information and Communication Engineering,Beijing Information Science & Technology University,Beijing 100101,China; 2.Beijing TransMicrowave Science and Technogy Company Ltd,Beijing 100080,China)
The actual angle included between antenna beam direction of radar speed sensor used for measuring speed of the locomotive and horizontal will change as the locomotive vibrations,which lead to a certain deviation between the speed value of radar sensor measuring and the actual speed of the locomotive.In order to improve the accuracy of the speed measurement values, radar speed sensor with a dual antenna can automatically correct the angle between antenna beam and horizontal.By Matlab data analysis and practical test,velocity measurement value of the radar sensor system with angle correction is closer to real locomotive speed.
locomotive speed measuring; radar sensor; dual antenna; angle correction
10.13873/J.1000—9787(2016)12—0069—03
2016—02—24
國家自然科學(xué)基金資助項(xiàng)目(61671069)
TN 958
A
1000—9787(2016)12—0069—03
李 萌(1990-),女,碩士研究生,研究方向?yàn)槔走_(dá)傳感器信號(hào)處理。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06