爬壁機器人防仰防溜研究*
2016-12-15 07:02:20袁曉洲朱志強
工程技術研究 2016年11期
關鍵詞:研究
袁曉洲,朱志強
(江西銅業集團公司貴溪冶煉廠,江西 鷹潭 335424)
爬壁機器人防仰防溜研究*
袁曉洲,朱志強
(江西銅業集團公司貴溪冶煉廠,江西 鷹潭 335424)
爬壁機器人在高樓救援、偵察、幕墻清洗等危險性工作中應用非常廣泛。但面臨著很多技術性的難題,如壁虎腳吸盤自動吸附和自動解除吸附的問題、履帶式吸盤機器人無法小半徑轉彎的難題、機器人在前進過程中車身前端后仰的問題、機器人在前進過程中車身側滑的問題、機器人溜車的問題、機器人爬壁時越障和越溝槽的問題等。文章重點研究爬壁機器人爬升時車身前端后仰和下降時溜車問題。
履帶式機器人;爬壁;防后仰;防下溜
21 世紀以來,國內外對機器人技術的發展越來越重視。機器人技術被認為是對未來新興產業發展具有重要意義的高技術之一。歐盟在第七框架計劃(FP7)中規劃了“認知系統與機器人技術”研究、美國啟動了“美國國家機器人計劃”、日本、韓國在服務型機器人方面也制定了相應的研究計劃[1],我國在國家高技術研究發展計劃(863計劃)、國家自然科學基金、國家科技重大專項等規劃中對機器人技術研究給予極大的重視。國內外產業界對機器人技術引領未來產業發展也寄予厚。由此可見,機器人技術是未來高技術、新興產業發展的基礎之一,對于國民經濟和國防建設具有重要意義[2]。
近年來,機器人技術研究與應用取得了突破式進展,尤其是履帶式移動機器人的研究和應用更為廣泛。如歐洲航天局的固定履帶式機器人 Nanokhod、美國 iRobot 公司生產的 Packbot 系列機器人[3]、本千葉工業大學研制的搜救機器人“木槿”[4]等,主要運用在惡劣環境之中,有較強的爬坡、越障和跨溝能力。隨著高樓林立,高樓救援、偵察、幕墻清洗等危險性工作需要機器人來代替。爬壁機器人的研究開始受到重視,但面臨著很多技術性的難題,如壁虎腳吸盤自動吸附和自動解除吸附的問題、履帶式吸盤機器人無法小半徑轉彎的難題、機器人在前進過程中車身前端后仰的問題、機器人在前進過程中車身側滑的問題、機器人溜車的問題、機器人爬壁時越障和越溝槽的問題等。文章重點研究爬壁機器人爬升時車身前端后仰和下降時溜車問題。
1 履帶式爬壁機器人機械結構設計
履帶式爬壁機器人機械結構三維總裝如圖1所示。履帶式爬壁機器人主要由動力裝置,傳動裝置,執行裝置及輔助部分(鏈條鏈輪,齒輪轉動,離合器,推力軸承等)等組成。爬動前,小吸盤吸附壁面,動力裝置通過鏈輪帶動固定在鏈條之間的小吸盤運動,與主軸相連的摩擦片之間產生的摩擦力通過連桿傳遞給前軸,以使機器人與壁面受力均勻,機器人平穩向上爬動。當爬行到既定的距離需要轉彎時,主電機停止轉動,啟動輔助電機,由輔助電機轉軸相連的蝸桿帶動渦輪軸上的大凸輪向內推動大吸盤,使大吸盤接觸壁面,大凸輪轉過一定角度后,凸槽撥動撥桿,大吸盤吸住壁面。此時,拉簧向外拉開小吸盤撥桿擋塊,在彈簧的拉力作用下,撥桿彈開,小吸盤對壁面的吸附力消除。轉軸繼續轉動,與軸相連的錐齒輪帶動演變的卡當機構,該機構帶動機器人轉彎。轉彎動作完成后,小凸輪向內推動小吸盤擋塊,擋塊撥動其撥桿,小吸盤吸附在壁面上,大吸盤在拉簧的回復拉力作用下脫離壁面,然后主電機啟動,至此機器人即可按照轉過的角度繼續爬行。向下返程時,主電機主軸反轉,在離合器的作用下,主軸上的摩擦片不產生相對運動,前后軸間的作用力失效,從而機器人可實現安全平穩的上下爬行和轉彎的全能運動。
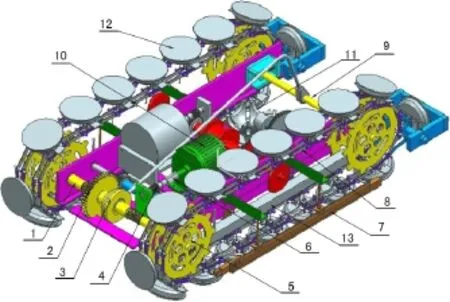
圖1 履帶式爬壁機器人機械結構三維總裝圖
2 履帶式爬壁機器人車身前端防后仰技術方案
具體技術方案如圖2所示。向上勻速運動時。運用摩擦力恒定打滑原理,當小車開始運動時利用單向軸承6的單向超越性使主動摩擦片5與主動軸8的運動同步,帶動從動摩擦片4作圓周運動,并將兩摩擦片產生的摩擦力通過壓桿7傳到小車前端,從而防止車身后仰。通過調整調距螺母1調節彈簧2的彈簧力,進而可隨意調節主從摩擦片間的傳動摩擦力。
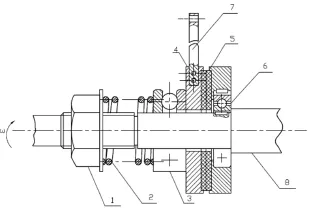
圖2 防后仰裝置
3 履帶式爬壁機器人防溜車技術方案
當機器人向下運動時,在重力作用下車身會加速運動,使主動軸上的動力成為主動件,從圖2機械結構可以看出,設計的傳動機構可使機構向下加速運動時自動鎖死,實現向下運動時的勻速,保持機構的穩定性,防止溜車事件的發生,使前端壓桿壓力自動失效。
4 履帶式爬壁機器人性能分析
設計的該套裝置,在光滑墻面上自由移動時,有很好的操作性和和安全可靠性。經實驗利用手動裝置的攀爬速度可達2m/s,機動裝置可載人在傾角為0~360℃的范圍內的光滑墻壁或玻璃上隨意移動,移動速度可用控制器在0~10m/min之間隨意調節,可承受最大負載80kg,可實現小半徑轉彎(轉彎半徑為車身長度的一半),并可輕松跨越20mm以內溝槽,且性能穩定,不會發生溜車事故。
[1]徐揚生.智能機器人引領高新技術發展[N].科學時報,2010-08-12.
[2]譚民,王碩.機器人技術研究進展[J].自動化學報.2013,(7).
[3]朱曉光.雙足機器人步態與路徑規劃研究[D].華北電力大學,2012.
[4]吳大華.四足仿生機器人狀態感知系統的軟件設計與優化[D].中南大學,2013.
TP242.2
A
2096-2789(2016)11-0010-02
湖北省自然科學基金項目(2014CFC1060);湖北省教育科學“十二五”規劃課題(2013B320)。
袁曉洲(1964-),男,湖北漢川人,教授,碩士,研究方向:機械工程與高等教育研究。
朱志強(1981-),男,河南周口人,碩士研究生,副教授,研究方向:機械工程研究。
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
遼金歷史與考古(2019年0期)2020-01-06 07:45:20
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
電子制作(2018年11期)2018-08-04 03:26:04
汽車工程學報(2017年2期)2017-07-05 08:13:02
國際商務財會(2017年8期)2017-06-21 06:14:14
電子制作(2017年23期)2017-02-02 07:17:19
