礪劍精兵
2016-12-13 15:51:03熊偉
兵器知識 2016年12期
熊偉
[編者按]在“跨越險阻2016”挑戰賽C組預賽中,南京理工大學的“礪劍”無人車僅用12分鐘就完成所有越野科目和偵察科目,以突出成績獲得第一名。整個比賽過程中,筆者有幸多次采訪了該車研制團隊——南京理工大學計算機科學與工程學院的主要負責人,朱健聲和蔡云飛老師。


蔡云飛老師向記者介紹,“礪劍”無人車也稱為“地面多任務無人機動平臺”,目前研制有IV型和IV-A兩款型號。在預賽種,他們使用的為IV型(參見下圖),長1.015米,寬0.614米,車體高度在0.305到0.36米之間可變,自重50千克,有效負重30千克,最大行駛速度17千米/小時。決賽時,上場的是IV-A型,長1.12米,寬0.625米,車體高度在0.34到0.43米可變,自重 55千克,載重30千克,最大行駛速度25千米/小時。他們的總體結構和主要技術特點都相似。
這個研究團隊從1997年就開始從事地面輕小型無人平臺的研究工作,先后對履帶機器人傳動、變速、行走、懸掛、車體結構、履帶變形機構、操控終端等各方面都進行了頗具成效的研究,獲得多項國家發明專利。在成果的工程化轉換方面,他們也積累了豐富的理論和實踐經驗。該團隊主要成員研制的移動平臺,已成功應用10年,發揮了重要作用。2011年提出的履帶式偵察機器人結構方案,也獲得肯定,在此后的研制工作中先后攻克了機器人技術重點的各項難題、關鍵性技術,比如總重限制、工作時間、快速分解組合、武器快速掛接、同步瞄準、擊發控制、傾覆復位、大轉矩高精度云臺、底盤降噪、武器后座緩沖、載荷舉升與俯仰調節機構等等。

記者在比賽現場也感受到,樸實的朱健聲老師在業內有比較高的知名度,很多其他參賽隊都對他們的設計有不少了解,看好他們的比賽成績。
記者注意到,參加C組決賽的6輛無人車,雖然都是履帶的,但“礪劍”、“星越”兩車的行走機構和其它車不同。蔡老師介紹說,這兩車的行走裝置是懸掛履帶式的,決賽中的其它無人車都是非懸掛履帶式。像國外的“魔爪”、PackBot那種無人車,還有很多排爆機器人,都是不帶懸掛的,剛性底盤結構,其好處是平臺姿態穩定性高,能滿足排爆等特殊任務的高精度操作需要。

“我們這個是面向野戰用的,具有高速、高通過性。”蔡老師介紹說,那種剛性懸掛的輕小型無人車他們2008年起也研制過,但存在幾個固有缺點無法克服。一是地面適應性差、速度低、越野性能差,很難趟水過河,在爛泥地、草地、鵝卵石、磚塊廢墟等環境中行駛還很容易掉履帶。二是觀察視窗跳動厲害。由于它的車體與履帶間沒有柔性的懸掛,地面的起伏都會傳到車體上,導航攝像頭傳回的圖像會劇烈跳動,操控者看久了會嚴重不適。如果導航攝像頭裝在車體上,操作員相當于貼著地面“看”周圍,視野范圍還會比正常情況小很多。記者觀察過幾款無人車的操控臺,從顯示屏上看到的圖像確實非常非常別扭。模糊不清是一方面,更重要的就是太“矮”,判斷距離、方向時都和原本的感覺差別很大。
“礪劍”研究團隊在履帶高效率轉向傳動及控制、履帶地表適應性變形技術等方面,做了很多努力,在平臺上采用了可升降懸掛,可以在懸掛車體和剛性車體兩個狀態間自由切換,并可通過四個方位的獨立升降懸掛進行車體姿態調整。

普通行駛時,它的外形有些像一輛小坦克,能爬上25厘米高的垂直墻,爬上35°的坡。負重輪上下活動的行程可以達到5厘米,IV-A型則達到了9厘米,因此能承受高速越野行駛時的強烈震動和沖擊。這次挑戰賽中有樓梯,預賽中有沙坑,碎磚、土堆組成的陡坡,對“礪劍”來說都沒有問題。朱老師還認為預賽場地簡單了點,決賽時很希望能到前面的河灘、鵝卵石路況下跑一跑。
“礪劍”的懸掛調低后,車底距地高從13厘米降到5.5厘米,履帶接地長度從56厘米增加到88厘米。這不僅讓它能跨越45厘米寬的壕溝,還提高了縱向、橫向的穩定性,在五六十度的縱向坡面上都不會傾覆。
非懸掛的履帶行動裝置上,履帶和主動輪、誘導輪、負重輪之間,要有比較大的張力,是繃緊的,容雜量小而排雜能力差。而轉向,會讓地面雜物大量進入履帶、懸掛空間。雜草、粗沙、污泥等卡入履帶和輪子中間后,不容易排出,導致張力過大,無法轉動。而在有懸掛的履帶上,輪履之間有一定的彈性空間,不會急劇增加主動輪的轉動負荷,沙石草等可以在滾到下一個輪子時逐步脫落。

對于履帶車來說,轉向靠兩側履帶差動、反轉,因此防脫落是個關鍵課題。研究團隊經過十多年摸索,有了一些獨特的履帶防脫技術,能在草地、沙石地、泥濘地等各種惡劣地面行駛。按照蔡老師的話說,就是“不會掉履帶,隨便你怎么玩。”
“礪劍”使用雙流轉向控制模式,后部的動力艙里布置有兩臺電動機,主電機350瓦,轉向電機250瓦。行進時只需一個電機工作,傳動效率較高。比賽中,“礪劍”只是采用了普通高速檔,速度就已經比其它無人車快了近一倍,給觀賽者留下了非常深刻的印象。
朱老師介紹說,“礪劍”還能采用混合動力模式,也就是一個電機加一個內燃機。變速箱上有兩個動力輸入點,其它都是一樣的,直接接上就行。兩個發動機如果同時工作,無人車的速度能更快,試驗中曾達到近50千米/小時!當然此時回傳的圖像已經抖動劇烈,操作員不容易控制了。所以內燃機的最大用途,還是便于在野外長期工作,免除了充電的麻煩。
依靠車內電池,“礪劍”能連續運行至少4小時。無人車要想得到很長的續航時間,可以外接電池,但防水問題很難解決。車體內的電池,防水防震,但更換起來麻煩。有了內燃機,無人車可以“快速復活”,花一兩分鐘加上油就可以了。這也適合快速反應。

這個內燃機還可以給電池充電,記者看到車體內就有一些24伏、12伏電源輸出口。外場維修時,電動螺絲刀、電烙鐵等工具,都可以接到這里。手機、遙控設備也可以在這里充電。當然,采用內燃機也有一些缺點。一是噪音大,二是加上散熱器、油箱等,會占用載荷艙的一半空間。如果車體再大一些,更適合采用這種混合動力系統。
記者詢問是否能用小一些的內燃機,專為充電用,這樣既保證尺寸,又具備野外長期工作的方便。朱老師解答說:內燃機充電的效率不高,直接驅動無人車行駛更合適一些,不太適合專為充電而設置。如果少量地用電,太陽能電池板倒是也可以考慮。
總得來說,依靠電控機械變速箱、雙流傳動、多動力復合驅動等技術,“礪劍”無人車在動力系統這塊比較靈活,怎么配置就看各種不同的需要了。
朱老師打開動力系統上的艙蓋介紹時,順手打開了車體上另外幾個蓋子。那是工具箱,其它無人車很少有這樣的設置。蔡老師介紹說,這也是因為他們的無人車已經比較成熟,不再是原理樣車,可以算型號的初樣車了。再過一輪設計修改,就可以作為正樣車,“然后全部工程化,基本上就OK了。”

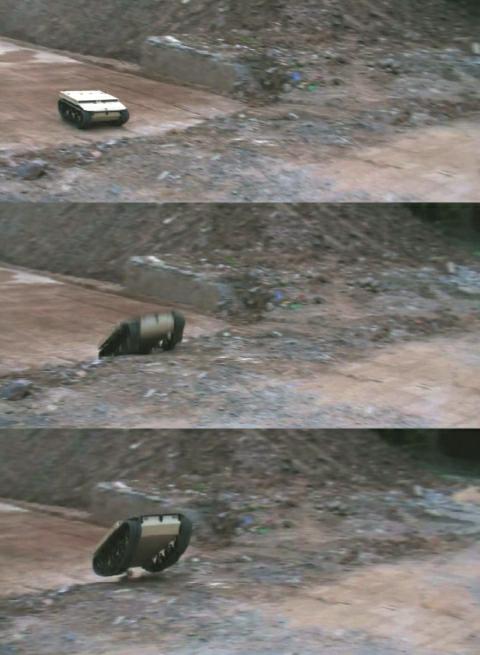
從樣車到成熟產品,確實還需要很多路走。在決賽中,“礪劍”無人車就因為一個小細節,引起翻車。它的車體中部是載荷艙,尺寸不小,40×27×23立方厘米,可以放多種設備。整車自重50~55千克,載重能達到30千克。但在這次比賽中,它的負載能力用不上,車頂搭載了一個球形光電探測器就足夠了。載荷艙內前部被臨時加裝了一塊電池,增加配重,進一步提高爬樓、過障時的穩定性。還不是正式的載荷,因此也就沒采取螺栓等固定措施。從頭一天熟悉場地開始,團隊多次操縱無人車在樓梯、草坪等場地試駕。測試后,團隊認為自己只需半小時就能完成比賽。預賽成績已經領先其他隊很多,只要找到18個目標中的5、6個,他們就能穩獲冠軍(總成績由預賽分和決賽分加權平均得出)。但為了充分展示性能,團隊決定奔著找齊18個目標去。樓內9個目標要比樓外的相對集中,因此他們制定了先上樓偵察,后室外偵察的策略,希望能把所有目標都找到,而且看起來問題不大。


正式比賽時,“礪劍”一馬當先,比同組比賽的另外兩車早早進入樓房,快速向三樓爬去。觀賽者都為他們的速度趕到驚嘆(其實這只是他們的正常速度),現場解說也告訴大家他們是預賽第一名,速度快、越野能力強。不料經過前一天的多次試跑、爬樓、顛簸,載荷艙里的電池有些松動了。這次爬上兩層樓后,在持續震動下,電池滑向了載荷艙后部,整車重心突然偏后。結果無人車從樓梯上倒翻過來。對于經過加固考慮的車體來說,這沒多大問題,但車頂的光電探測器被壓壞,無人車失去了最主要的觀察設備。此后它只能依靠車體上的駕駛用攝像頭尋找偵察目標,效果大打折扣。而且在翻回車體過程中,一個小攝像頭不慎被手指、膠帶弄模糊,現場維修后的“礪劍”成了高度“近視眼”。天線也因翻車受到些影響。結果無人車幾次從偵察目標旁經過,都沒能看清目標。尋找到的目標數量少,影響了“礪劍”的決賽總分。
賽后整個團隊也是因為這個意外而感到遺憾,蔡老師說接下來的工作就是要在工程化這塊做最后的細化、完善。
這次挑戰賽中,絕大多數輕小型無人平臺都是樣車,并非完成所有工程化設計的產品,有的甚至只是概念型樣車。再加上無人平臺是動力、機械、通訊、光電等多方面技術的集成,因此意外頻出。有不少都并非設計、結構不好,而是某個小小的細節、意外影響了參賽表現。
“礪劍”這一跟頭翻得,讓很多觀賽者都感覺很可惜。不過對這類輕小型無人車來說,這樣的情況不會造成重大傷害。決賽中另外一輛小車也在爬樓時翻車。它們的車體都能經受這種沖擊、碰撞。
不僅如此,“礪劍”的車體還有很好的密封性,讓該車能在水面浮渡。設計團隊通過十多年研究,已經掌握了一套高強度、高抗變形箱體材料及成型技術。以前的試驗中,它們還經受住了武器射擊時的沖擊、碰撞。
武器站能通過螺栓直接固定在車頂,或載荷艙位置。它的設計載荷為30千克,實際上能達到六七十千克。而30千克,已經是滿足一整套單兵裝備的重量,包括武器彈藥等。如果帶反坦克導彈、大威力火箭筒,能有2枚,輕型火箭筒能帶4枚。以它的尺寸和速度,能快速突進到敵方車輛附近幾百米,即便用無制導的火箭彈,也能快速抵近、毀傷目標。

利用這套箱體材料和成型技術,還能根據需要設計制造不同尺寸的無人車。履帶、行走系統也都是模塊化設計,有幾種可選,包括履帶板的形狀,負重輪懸掛的方式等。比“礪劍”小一些的同系列無人車,也具備良好的越野、高速性能,可以帶榴彈等武器。
在輕小型無人平臺(也稱地面輕小型機器人)研究領域,“礪劍”無人車設計團隊的主要成員都具有10年以上的技術積累和實際工程經驗。在隨后的采訪中,記者和他們也就無人車的戰場應用交流了很多看法。
“魔爪”、PackBot等無人車已被美軍廣泛用于阿富汗、伊拉克戰場,負責路邊炸彈檢查、拆除,山洞內偵察,甚至進攻性戰斗等任務。
俄羅斯也有多款無人戰車、無人掃雷車投入實用。2016年年初,在敘利亞戰場,俄軍6輛無人車投入了一次高地爭奪戰。遙控人員操縱他們抵近到IS武裝分子據點前100米,用機槍和火箭筒進行火力壓制,敘利亞政府軍士兵則在無人車后150~200米的安全距離對敵人進行清掃。遇到堅固火力點后,無人車傳回圖像、坐標,引導榴彈炮進行拔點炮擊。戰斗持續了20分鐘,IS武裝分子沒有還手之力,被擊斃70人,而敘利亞政府軍只有4名士兵受傷。
俄軍投入戰斗的“平臺M”履帶式無人車、“阿爾戈”輪式無人車和美軍無人車相比,就有很大不同。它們重量更大,分別為0.8和1噸,高度1.2和1.65米,配有防護裝甲;火力強悍,除了一挺7.62毫米機槍,還有4、5具火箭筒、榴彈發射器。

“礪劍”無人車研究團隊認為:反恐、排爆和作戰行動相比,時間更加充裕,無人車也不需要帶很多載荷;而戰斗行動(無論城市還是野外),即便是反恐行動的偵察,無人車都必須有足夠的反制措施,配備一定的武器或裝甲。遭遇敵方攻擊時,它能利用火力予以反擊,或利用高速等措施進行規避、擺脫。即便是反恐戰爭中的排爆行動,也需要無人車具備一定的反制能力。比如伊拉克反美武裝曾雇傭小孩,拿著油漆噴罐走到PackBot無人車前,往攝像頭上一噴,價值成千上萬的無人車就歇菜了。跑跑不過,打又不方便打。
如果是巷戰,彈坑、斷墻會是常見的障礙。即便沒有這些障礙,也有人想出過一些專門針對小型無人車的簡單辦法,比如用漁網罩上,看你怎么擺脫。
因此在輕小型軍用無人車的研制上,高速、高通過性,載荷、反制能力,是“礪劍”研究團隊重點追求的目標。
遙控、通訊技術,是這類小型無人車的另一關鍵技術點。它要具備一定的抗干擾能力,這樣才能適應有眾多電磁污染的戰場。但對于通訊距離、通視情況,記者和研究團隊都認為沒必要太遠。隔著幾道院墻、樓宇遙控無人車,實戰中恐怕很難出現,因為后方的士兵們都會及時跟上,也不會讓無人車獨自跑那么遠。更多情況,可能是士兵們隱蔽在一個拐角或山坡之后,不在敵人的直瞄范圍內就行。

隨著比賽結束,記者和朱老師、蔡老師,“礪劍”無人車研究團隊的交流,也告一段落。通過這次比賽和交流,記者深感輕小型無人平臺在未來戰場,包括城市戰、野戰、反恐,偵察、戰斗、排爆,等等各方面,都有非常重要的應用前景。
可以說:以后誰能把這支無人小尖兵之劍,砥礪得更加鋒利,誰就將在戰斗中占據重大優勢。
寶劍鋒從今磨礪,未來沙場贏先機!

