純電動(dòng)轎車電動(dòng)真空泵控制器技術(shù)研究
2016-12-06 06:44:44夏順禮陶冉
汽車零部件 2016年10期
夏順禮,陶冉
(安徽江淮汽車股份有限公司技術(shù)中心,安徽合肥 230601)
?
純電動(dòng)轎車電動(dòng)真空泵控制器技術(shù)研究
夏順禮,陶冉
(安徽江淮汽車股份有限公司技術(shù)中心,安徽合肥 230601)
通過(guò)對(duì)真空泵控制系統(tǒng)的原理進(jìn)行分析,以MC9S08DZ60單片機(jī)為核心,結(jié)合壓力開(kāi)關(guān)信號(hào)、電壓檢測(cè)電路等硬件設(shè)計(jì),完成壓力信號(hào)采集、真空泵驅(qū)動(dòng)控制、故障診斷等幾方面軟件的開(kāi)發(fā),最終通過(guò)可靠性與耐久性的臺(tái)架測(cè)試,設(shè)計(jì)出一款專門用于純電動(dòng)汽車的真空助力制動(dòng)系統(tǒng)控制器。
純電動(dòng)汽車;單片機(jī);真空泵
0 引言
21世紀(jì)以來(lái),世界汽車保有量逐年增加,迅速增長(zhǎng)的石油消費(fèi)和日益嚴(yán)峻的環(huán)保壓力迫使汽車生產(chǎn)業(yè)必須走節(jié)能環(huán)保的發(fā)展道路[1]。傳統(tǒng)內(nèi)燃機(jī)轎車的制動(dòng)系統(tǒng)真空助力裝置的真空源來(lái)自于發(fā)動(dòng)機(jī)進(jìn)氣歧管[2],而純電動(dòng)汽車沒(méi)有發(fā)動(dòng)機(jī)總成,制動(dòng)系統(tǒng)由于沒(méi)有真空動(dòng)力源而喪失真空助力功能, 僅由人力所產(chǎn)生的制動(dòng)力無(wú)法滿足行車制動(dòng)的需要, 因此需要對(duì)制動(dòng)系統(tǒng)真空助力裝置進(jìn)行改制, 而改制的核心問(wèn)題是產(chǎn)生足夠壓力的真空源[3]。文中提出一種真空泵控制器的硬件與軟件開(kāi)發(fā)方法,完成真空泵控制器開(kāi)發(fā),滿足純電動(dòng)轎車制動(dòng)系統(tǒng)需求。
1 系統(tǒng)分析與組成
真空助力制動(dòng)系統(tǒng)采用電壓力開(kāi)關(guān)為系統(tǒng)壓力檢測(cè)器件,真空泵控制器檢測(cè)到系統(tǒng)壓力不足時(shí),電壓力開(kāi)關(guān)斷開(kāi),啟動(dòng)電動(dòng)真空泵為真空儲(chǔ)氣罐抽真空;當(dāng)真空儲(chǔ)氣罐內(nèi)部氣壓達(dá)到一定數(shù)值時(shí),控制器控制電動(dòng)真空泵停止工作。
電助力制動(dòng)系統(tǒng)為車輛安全件,考慮到助力制動(dòng)系統(tǒng)中真空泵的連續(xù)工作壽命,在系統(tǒng)設(shè)計(jì)中應(yīng)考慮以下幾個(gè)方面:
(1)考慮真空泵連續(xù)使用壽命,增加真空儲(chǔ)能罐,通過(guò)識(shí)別壓力開(kāi)關(guān)狀態(tài),采用合理的控制策略,使控制器對(duì)真空泵做出實(shí)時(shí)運(yùn)行或停止指令;
(2)在產(chǎn)品開(kāi)發(fā)階段,根據(jù)計(jì)算的純電動(dòng)車制動(dòng)需求,使用壓力儀表,對(duì)控制器的控制策略進(jìn)行相關(guān)參數(shù)標(biāo)定;
(3)考慮系統(tǒng)安全性,對(duì)真空泵控制采用閉環(huán)控制和安全監(jiān)控的雙重保護(hù)策略。
系統(tǒng)采用電壓力開(kāi)關(guān)為系統(tǒng)壓力檢測(cè)器件,當(dāng)系統(tǒng)壓力不足時(shí),電壓力開(kāi)關(guān)斷開(kāi),啟動(dòng)電動(dòng)真空泵為真空儲(chǔ)氣罐抽真空;當(dāng)真空儲(chǔ)氣罐內(nèi)部氣壓達(dá)到一定數(shù)值時(shí),電動(dòng)真空泵停止工作。為純電動(dòng)車設(shè)計(jì)的電助力制動(dòng)系統(tǒng)的基本構(gòu)成圖如圖1所示。

圖1 純電動(dòng)車電助力制動(dòng)系統(tǒng)基本構(gòu)成圖
2 控制器硬件設(shè)計(jì)
在電助力制動(dòng)系統(tǒng)中,真空泵控制器為核心器件。基于純電動(dòng)車設(shè)計(jì)的電助力制動(dòng)系統(tǒng)控制器采用Freescale公司生產(chǎn)的MC9S08系列單片機(jī)為測(cè)量控制單元,控制整個(gè)系統(tǒng)運(yùn)行。
電壓力開(kāi)關(guān)的輸出信號(hào)通過(guò)信號(hào)處理電路輸入至單片機(jī),控制器采用掃描方式獲得單片機(jī)IO管腳狀態(tài)。當(dāng)檢測(cè)到電壓力開(kāi)關(guān)信號(hào)轉(zhuǎn)變時(shí),控制單元立即響應(yīng)當(dāng)前管腳狀態(tài)值,輸出相應(yīng)的信號(hào)控制真空泵的工作狀態(tài)。
電助力制動(dòng)系統(tǒng)是整車的安全件,所以對(duì)安全性、可靠性要求較高。綜合考慮系統(tǒng)的安全因素后,在真空泵控制器中使用模數(shù)轉(zhuǎn)換模塊實(shí)時(shí)監(jiān)控驅(qū)動(dòng)電流,保護(hù)動(dòng)力器件電動(dòng)真空泵。
同時(shí),還為控制器設(shè)計(jì)了通信模塊,電助力制動(dòng)系統(tǒng)通過(guò)CAN線與純電動(dòng)車的整車控制器進(jìn)行信息交互,實(shí)時(shí)將助力制動(dòng)系統(tǒng)信息交由整車控制器診斷與處理,有效地提高車輛的安全等級(jí)。電助力制動(dòng)系統(tǒng)控制器的硬件組成框圖如圖2所示。

圖2 控制器硬件框圖
3 控制器軟件設(shè)計(jì)
控制器軟件包含傳感器信號(hào)采集與處理、真空泵工作控制、系統(tǒng)故障診斷與處理、系統(tǒng)模式識(shí)別與轉(zhuǎn)換、通信信號(hào)處理共5個(gè)軟件功能組,軟件架構(gòu)如圖3所示。

圖3 軟件架構(gòu)
3.1 傳感器信號(hào)采集與處理模塊
當(dāng)純電動(dòng)車啟動(dòng)時(shí),車內(nèi)的低壓供電系統(tǒng)為真空泵控制器提供12 V電源。真空泵控制器以5 ms為周期,實(shí)時(shí)采集壓力開(kāi)關(guān)與真空泵工作電流兩個(gè)信號(hào)。
壓力開(kāi)關(guān)信號(hào)為數(shù)字量信號(hào),軟件中使用7次采樣為1個(gè)循環(huán),當(dāng)識(shí)別到7次采樣的結(jié)果中有大于等于4次為高電平,則認(rèn)定為高電平,說(shuō)明壓力開(kāi)關(guān)斷開(kāi),真空罐內(nèi)負(fù)壓足;反之認(rèn)定為低電平,壓力開(kāi)關(guān)吸合,真空罐內(nèi)負(fù)壓不足。
真空泵工作電流為模擬量信號(hào),軟件采用中值濾波法完成信號(hào)處理,即采集信號(hào)5次,去除最大最小值后求取平均值。
3.2 真空泵工作控制模塊
控制器以5 ms為周期完成壓力開(kāi)關(guān)的采集和檢測(cè),通過(guò)識(shí)別壓力開(kāi)關(guān)的狀態(tài)控制真空泵運(yùn)行或停止。當(dāng)真空罐內(nèi)部壓力為-40 kPa時(shí),壓力開(kāi)關(guān)閉合,真空罐內(nèi)壓力不足,控制器控制真空泵工作;當(dāng)真空罐內(nèi)部壓力為-55 kPa時(shí),壓力開(kāi)關(guān)斷開(kāi),為了讓真空儲(chǔ)氣罐內(nèi)的負(fù)壓能提供3次制動(dòng)的助力,壓力開(kāi)關(guān)斷開(kāi)后,真空泵繼續(xù)工作10 s后停止,此時(shí)真空罐內(nèi)的壓力為-75 kPa。控制時(shí)序圖如圖4所示。

圖4 控制時(shí)序圖
3.3 系統(tǒng)故障診斷與處理模塊
真空泵系統(tǒng)故障主要有真空泵故障、壓力開(kāi)關(guān)故障、系統(tǒng)漏氣與通信異常4種。根據(jù)所采集的壓力開(kāi)關(guān)狀態(tài)、真空泵工作電流和制動(dòng)踏板3個(gè)信號(hào),實(shí)現(xiàn)對(duì)故障的判斷和處理。
3.3.1 真空泵故障
真空泵故障包含真空泵無(wú)法按照額定功率輸出和真空泵無(wú)法停止兩類故障。真空泵正常工作的電流范圍是10~12 mA,當(dāng)控制器檢測(cè)電流小于10 mA時(shí),則認(rèn)為真空泵無(wú)法按照額定功率輸出,此時(shí)若制動(dòng)踏板踩下,則控制真空泵連續(xù)工作10 s后停止。
當(dāng)真空罐壓力為-75 kPa,壓力開(kāi)關(guān)斷開(kāi),真空泵應(yīng)停止工作,但若控制器檢測(cè)到真空泵仍有電流,則認(rèn)為真空泵無(wú)法停止。
3.3.2 壓力開(kāi)關(guān)故障診斷
壓力開(kāi)關(guān)故障包含開(kāi)關(guān)斷開(kāi)與粘連兩類故障。
基于標(biāo)定參數(shù),真空罐壓力達(dá)到-75 kPa時(shí),可滿足3次制動(dòng)的需求。當(dāng)檢測(cè)到用戶多次踩下制動(dòng)踏板,壓力開(kāi)關(guān)仍處于斷開(kāi)狀態(tài)表示真空罐內(nèi)真空度足夠,則認(rèn)為壓力開(kāi)關(guān)無(wú)法吸合;當(dāng)檢測(cè)到無(wú)制動(dòng)踏板信號(hào),壓力開(kāi)關(guān)連續(xù)15 s處于吸合狀態(tài),表示真空罐內(nèi)真空度不足,則認(rèn)為壓力開(kāi)關(guān)粘連。
當(dāng)控制器識(shí)別到壓力開(kāi)關(guān)故障時(shí),當(dāng)控制器每次接收到制動(dòng)踏板信號(hào),控制真空泵連續(xù)工作10 s后停止,并發(fā)送故障碼至儀表顯示車輛故障。
3.3.3 系統(tǒng)漏氣故障診斷
真空罐內(nèi)的氣壓從-40 kPa到-75 kPa,標(biāo)定的真空泵正常工作時(shí)間為12 s,當(dāng)真空泵的工作時(shí)間超過(guò)12 s,則認(rèn)為系統(tǒng)有漏氣故障。
當(dāng)控制器識(shí)別到壓力開(kāi)關(guān)故障時(shí),并接收到制動(dòng)踏板信號(hào),則控制真空泵連續(xù)工作10 s后停止,發(fā)送故障碼至儀表顯示車輛故障。
3.3.4 通信異常故障
真空泵控制器通過(guò)與CAN通信接收整車控制器發(fā)送的制動(dòng)踏板信號(hào),當(dāng)真空泵控制器連續(xù)10次未接收到整車控制器的報(bào)文,則認(rèn)為真空泵控制器通信異常。當(dāng)控制通信異常,同時(shí)發(fā)生其他故障時(shí),則真空泵工作15 s、停止10 s,依次循環(huán);當(dāng)控制器通信異常,但未發(fā)生其他故障,則控制器接收到制動(dòng)踏板信號(hào),控制真空泵連續(xù)工作10 s。
3.4 系統(tǒng)模式識(shí)別與轉(zhuǎn)換
系統(tǒng)包含控制器初始化、正常工作模式、有通信故障模式與無(wú)通信故障模式共4種工作模式,系統(tǒng)模式轉(zhuǎn)換圖如圖5所示。

圖5 系統(tǒng)模式轉(zhuǎn)換
系統(tǒng)上電后,完成控制器自檢與初始化,以1 ms為周期實(shí)時(shí)監(jiān)控壓力開(kāi)關(guān)與真空泵工作電流,系統(tǒng)上電100 ms后控制器進(jìn)入正常模式。
正常模式下,以5 ms為周期采集和檢測(cè)壓力開(kāi)關(guān),通過(guò)識(shí)別壓力開(kāi)關(guān)的狀態(tài)控制真空泵運(yùn)行或停止。當(dāng)真空罐內(nèi)部壓力為-40 kPa時(shí),壓力開(kāi)關(guān)閉合,控制器控制真空泵工作;當(dāng)真空罐內(nèi)部壓力為-55 kPa時(shí),壓力開(kāi)關(guān)斷開(kāi),為了讓真空儲(chǔ)氣罐內(nèi)的負(fù)壓能提供較長(zhǎng)時(shí)間的助力,壓力開(kāi)關(guān)斷開(kāi)后,真空泵繼續(xù)工作10 s后停止,此時(shí)真空罐內(nèi)的壓力為-75 kPa。
當(dāng)檢測(cè)到系統(tǒng)有故障、但通信正常時(shí),系統(tǒng)進(jìn)入故障有通信模式,當(dāng)控制器接收到制動(dòng)踏板信號(hào),則控制真空泵連續(xù)工作10 s后停止,并在儀表上提示車輛故障。
當(dāng)檢測(cè)到系統(tǒng)有故障,同時(shí)也無(wú)法接收整車控制器的報(bào)文時(shí),系統(tǒng)進(jìn)入故障無(wú)通信模式,則控制器控制真空泵工作15 s、停止10 s,依次循環(huán)。
3.5 通信信號(hào)處理
真空泵控制器開(kāi)發(fā)了CAN通信功能,通過(guò)掃描方式實(shí)時(shí)接收整車控制器發(fā)送的制動(dòng)踏板信號(hào)。
真空泵控制器以100 ms為周期,給儀表發(fā)送語(yǔ)句顯示指令。
4 結(jié)論
考慮到電助力制動(dòng)系統(tǒng)為車輛的安全件,在實(shí)車使用之前需要先進(jìn)行試驗(yàn)臺(tái)架測(cè)試。對(duì)系統(tǒng)進(jìn)行了10組測(cè)試,每組測(cè)試分別讓電動(dòng)真空泵工作10次,記錄的參數(shù)有電動(dòng)真空泵連續(xù)工作的時(shí)間、電動(dòng)真空泵啟動(dòng)時(shí)真空罐的壓力和電動(dòng)真空泵停止工作時(shí)真空罐內(nèi)的壓力。表1為處理后的測(cè)量結(jié)果。
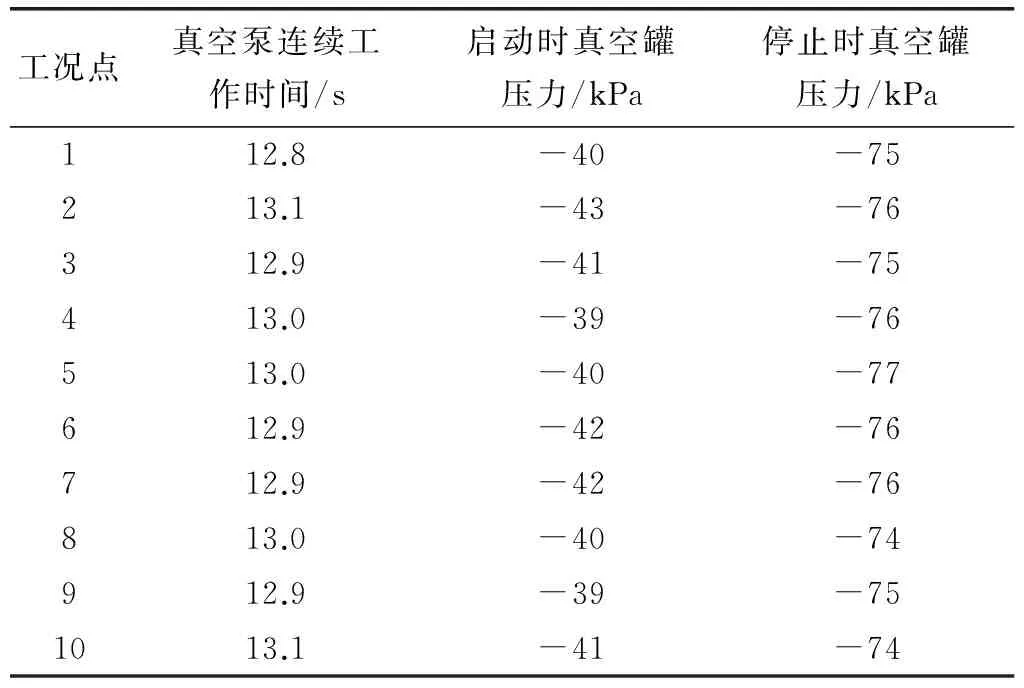
表1 系統(tǒng)測(cè)量結(jié)果
【1】冷偉,褚博文.純電動(dòng)汽車發(fā)展趨勢(shì)[J].科學(xué)導(dǎo)報(bào),2015,28(4):43-47.
【2】夏青松,楊華,徐達(dá),等.電動(dòng)真空助力制動(dòng)系統(tǒng)設(shè)計(jì)[J].上海汽車,2007(11):4-8.
【3】張欣宇,黃妙華,夏青松.一種用于電動(dòng)汽車的真空助力制動(dòng)系統(tǒng)設(shè)計(jì)[J].北京汽車,2007(6).
電動(dòng)超級(jí)跑車GLM G4終于亮相:化不可能為可能
2016年10月3日, GLM的全新豪華電動(dòng)汽車在巴黎車展 (Salon Mondial de l’Automobile) 上亮相。GLM G4是一款全新概念車:豪車不應(yīng)該只是對(duì)現(xiàn)有內(nèi)燃機(jī)型的拓展。GLM在京都成立,為汽車行業(yè)帶來(lái)了前所未有的電動(dòng)汽車技術(shù)與美觀設(shè)計(jì),還有日本對(duì)超高效率的執(zhí)著和對(duì)完美的追求。
如果EV代表電動(dòng)汽車,那么GLM則將EV詮釋為超級(jí)跑車。GLM G4屬于超級(jí)跑車類型,堪稱豪華電動(dòng)汽車的卓越典范,因?yàn)樗Y(jié)合了流線型的突出車身造型、4開(kāi)門和車內(nèi)超級(jí)舒適之感,可以容納4人以時(shí)尚方式長(zhǎng)距離出行。
GLM致力于采用先進(jìn)技術(shù)來(lái)取得良好效果, 即利用多源動(dòng)力模塊來(lái)提升傳動(dòng)效率和性能。兩個(gè)電池組安裝在GLM G4車身前后兩端,以便控制協(xié)調(diào)并提升性能。GLM G4采用多級(jí)傳動(dòng),這可以提升性能并且不受傳動(dòng)輸出的影響。 IGBT系統(tǒng)實(shí)現(xiàn)了降低切換損耗和提升電機(jī)效率。這款車型質(zhì)量較輕并且穩(wěn)定地融合了由復(fù)合材料組成的底盤結(jié)構(gòu)。
這款車型的系統(tǒng)總輸出超出1 000 N·m和400 kW并采用雙電機(jī),以便根據(jù)駕駛模式來(lái)分扭:0~100 km/h加速時(shí)間不到3.7 s,巡航速度達(dá)250 km/h;最大續(xù)航里程為400 km(新歐洲行駛工況)
這種優(yōu)勢(shì)還結(jié)合了多級(jí)傳動(dòng)系統(tǒng),而后者使市區(qū)和高速路況下駕車的耗電量較低。雙電機(jī)系統(tǒng)可協(xié)調(diào)持續(xù)計(jì)算路況并提供較大的牽引力。采用輕型耐用型材料的汞合金底盤結(jié)合了采用上好材質(zhì)的底盤結(jié)構(gòu)。
GLM首席執(zhí)行官裕康科馬表示:“汽車行業(yè)正在轉(zhuǎn)變,并且在未來(lái)幾年內(nèi),電動(dòng)汽車市場(chǎng)將實(shí)現(xiàn)顯著發(fā)展,在內(nèi)燃機(jī)汽車市場(chǎng)占據(jù)一定的份額。GLM的使命是引領(lǐng)電動(dòng)汽車的發(fā)展并突破電動(dòng)汽車的極限。我們的‘關(guān)鍵促成’技術(shù)和‘同一技術(shù)適用不同車型’的理念將適用于電動(dòng)汽車的發(fā)展,而人們?cè)诓痪玫膶?lái)將見(jiàn)證這一切。”
(來(lái)源:俞慶華)
Research on the Electrical Vacuum Pump Assistance System for Pure Electric Vehicle
XIA Shunli, TAO Ran
(Research & Development Center,Anhui Jianghuai Automobile Co.,Ltd., Hefei Anhui 230601,China)
Through analyzing the principle of the vacuum pump, taking the microchip MC9S08DZ60 as the core component, with the hardware design of pressure switch signal and voltage detect circuit and the software development of pressure signal sample, vacuum pump drive control and error diagnosis, an electrical vacuum pump control system which was used to match pure electrical vehicle was designed based on the test of the reliability and durability.
Pure electric vehicle; Microchip; Vacuum pump
2016-08-29
夏順禮,男,碩士,高級(jí)工程師,主要研究?jī)?nèi)燃機(jī)與新型動(dòng)力的開(kāi)發(fā)與量產(chǎn)技術(shù)。E-mail:zx.xny.jszx@jac.com.cn。
10.19466/j.cnki.1674-1986.2016.10.005
U469.72+2
B
1674-1986(2016)10-023-04
猜你喜歡
英語(yǔ)世界(2022年9期)2022-10-18 01:11:18
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
金橋(2020年9期)2020-10-27 01:59:44
中學(xué)生數(shù)理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:25:42
商周刊(2017年17期)2017-09-08 13:08:58
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
