傾角傳感器自動校準系統的設計
2016-11-30 09:39:00
傳感器世界 2016年1期
關鍵詞:測量
北京信息科技大學 信息獲取與檢測實驗室,北京 100101
一、引言
角度測量是計量科學的重要組成部分[1]。隨著科學技術的發展,現代化的測量傾角的儀器傾角傳感器,被大量地生產出來并應用于傾角測量領域。同時,人們對于測量的精確度和準確度的要求也在不斷提高。在需要批量生產傳感器的場合,傳統的校準方法由于其成本高、效率低和校準精度低等原因,顯然已經不適合于傾角傳感器的校準[2]。
針對以上問題,設計了一套傾角傳感器的自校準系統。該系統能夠校準不同接口型號的傳感器,校準范圍寬,校準速度和精度也非常高,正是在這個意義上,該系統具有較高的實用價值和廣闊的市場前景。
二、自校準系統的總體設計
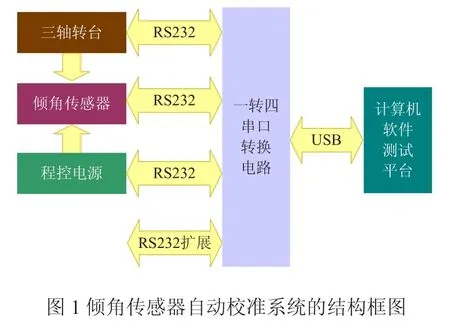
本課題將利用計算機控制整個校準過程,工作人員只需填寫校準時所需的傳感器的必要信息,如產品型號、接口形式、電源電壓等信息,填寫完畢后,計算機會計算最終的結果,中間的操作過程完全不需要工作人員的參與,全部的計算過程由計算機來完成。因此,要實現這個功能,就需要軟件和硬件的支持,以及軟件和硬件之間的配合。根據上面的設計思路,傾角傳感器自動校準系統的結構框圖如圖1所示。將傳感器固定在三軸轉臺上,程控電源給傾角傳感器供電,通過通信協議精確地控制轉臺帶動傾角傳感器轉動,通過一個功能電路將一個USB轉換成四個串口實現計算機軟件測試平臺與轉臺、電源、傾角傳感器進行數據通信。
三、自校準系統的硬件設計
由傾角傳感器自動校準系統的設計結構可知,上位機需要同時與轉臺、電源、傾角傳感器進行數據通信,但是同一個上位機不能實現上述功能,因此就需要一個功能電路將上位機的一個USB轉換成多個串口使用。
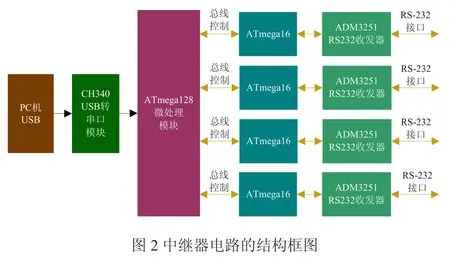
上位機通過USB與中繼器相連,利用芯片CH340將上位機的USB轉換成串口。轉換后的串口與主控芯片ATmega128相連,ATmega128通過總線對分處理器ATmega16進行控制,4個分處理器在分別與RS232收發器ADM3251E相連,實現一個串口轉換成四個串口。其中中繼器的三個串口則分別與三軸轉臺、待校準傳感器、程控電源的RS232串口相連,以實現安裝在上位機上的軟件同時與轉臺、電源和傳感器進行通信,另一個串口用于擴展。下面將詳細介紹中繼器的各個模塊。
中繼器電路包括ATmega128微處理器模塊電路、CH340串口轉換模塊電路、ADM3251 RS-232收發器模塊電路、以及有源晶振模塊電路。除中繼器電路外,還有單獨的電源模塊。中繼器電路的結構框圖如圖2所示。

1、ATmega128微處理器模塊電路
ATmega128作為中繼器模塊的核心芯片,起著連接軟件平臺和硬件電路之間的橋梁作用。ATmega128微處理器模塊電路圖如圖3所示。該電路包括復位電路、ISP程序下載電路、晶振電路、電源濾波等。 電阻R38和電容C35組成了復位電路,與單片機的20引腳相連;XTAL1、XTAL2兩個引腳為時鐘電路振蕩引腳,應與外接的時鐘電路相連,由于本電路采用有源晶振電路提供時鐘信號,所以只需要將有源晶振的輸出與單片機的24引腳相連即可;單片機的2、3、11、20引腳與ISP下載器相連,組成程序能夠下載到單片機的通路,本文所用的ISP下載器為雙龍電子AVRISP USB[3];電容C34、C36、C37、C38 組成了電容濾波電路,保證電源質量;A9-D1~A9-D8為數據總線,A8-CS、A7-CS、A6-CS、A5-CS為片選線。
2、分處理器ATmega16模塊設計
為了實現上位機同時與多個串口同時通信,本系統用ATmega128分別控制了4個單獨的分處理器,每個分處理器在控制1個ADM3251芯片,每個ADM3251的輸出就是標準的RS232接口。
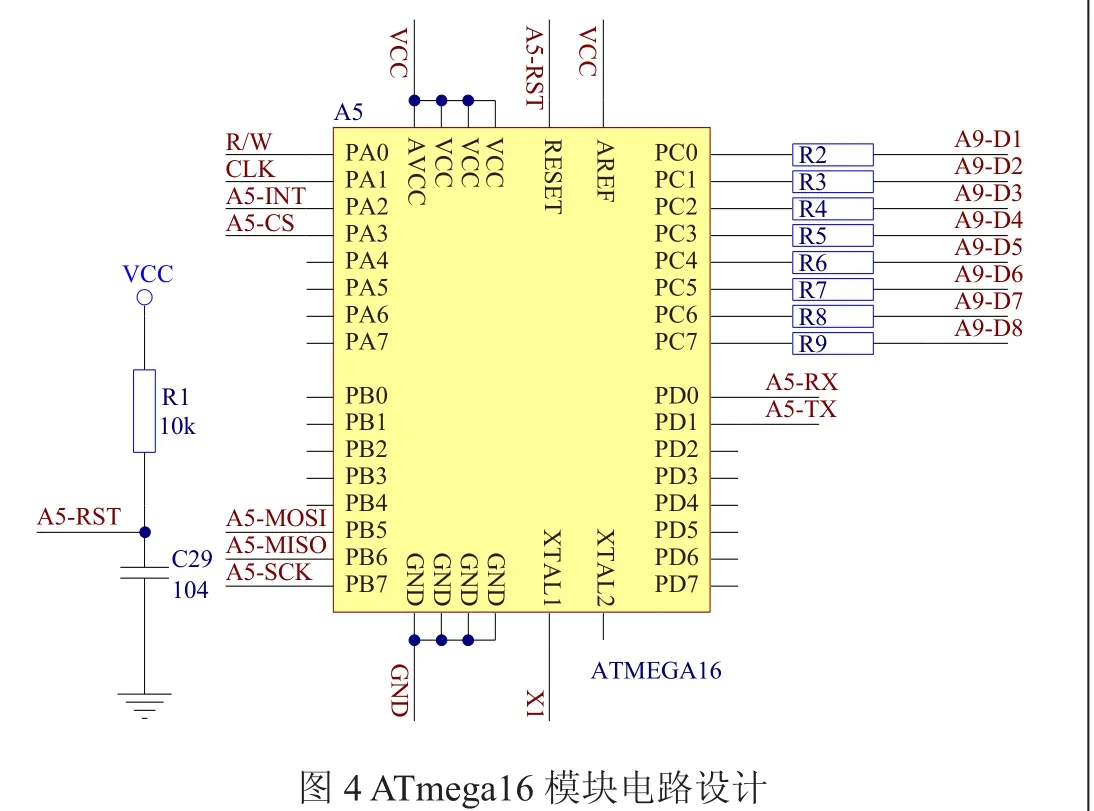
該系統會用到每個分處理器的8根數據線、4根下載線、1根片選線、1根中斷線、2根數據傳輸線,基于此及考慮到性價比的問題[4],選擇ATmega16微處理器作為分處理器。ATmega16微處理器的模塊電路圖如圖4所示。ATmega16微處理器的電路圖包括復位電路、時鐘電路、ISP程序下載電路以及與主處理器之間的數據通信等。
3、CH340串口轉換模塊電路
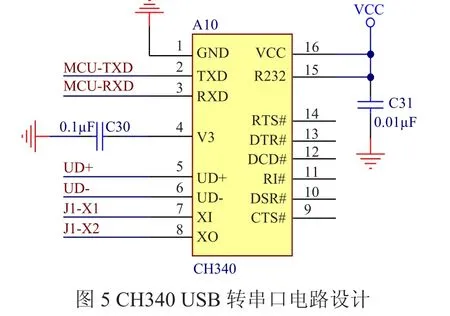
由于所用上位機的USB口有限,若上位機要同時與轉臺、程控電源、待校準傳感器進行通信,就需要一個將USB轉換成串口的電路。因此,選擇CH340芯片實現USB轉串口,電路設計如圖5所示。USB的四根引線分別跟電源、地和CH340的兩個引腳UD+和UD-相連。為了防止反接以及保證電壓質量,在USB的電源處連接了二極管以及電容。由于芯片CH340內部設置了上拉電阻[5],因此,引腳UD+和UD-可與USB 總線直接相連。
CH340 電路不需要設計外圍復位電路,因為芯片內部設置了復位電路。CH340 芯片正常工作條件是外部晶振電路向其時鐘信號引腳提供12MHz 的時鐘信號。一般情況下,CH340內置的反相器通過晶體穩頻振蕩會產生時鐘信號。因此,再設計外圍電路時,只需要連接一個12MHz 的晶體在XI和X 兩個引腳之間,同時在兩個引腳處對地連接振蕩電容。
4、ADM3251 RS-232收發器模塊電路
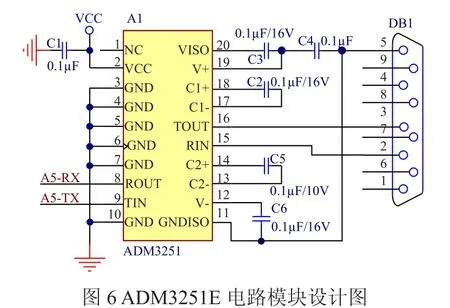
本系統需要三路RS232接口,以便于同時與帶校準傳感器、轉臺、程控電源進行通信,所以選用ADI(Analog device, inc)公司推出的RS-232 隔離器ADM3251E,該器件是在iCoupler 和isoPower 磁隔離專利技術的基礎上完成的,ADM3251E電路模塊設計的電路圖如圖6所示。
ADM3251E內部含有倍壓器和反相器,其中引腳17、18、19、20組成了倍壓器,引腳13、14構成了反相器,因此在這些引腳處連接0.1μF電荷泵電容,則該器件就可以連接5V電源為其電路進行供電。引腳8、9分別是接收輸出和發射輸入,應與相應的微處理器ATmega16的接收輸入和發射輸出相連。由于ADM3251內部有隔離電源,因此無需外加光耦隔離。
5、有源晶振模塊電路
本課題中的一轉四串口轉換部分需要4個ATmega16微處理器控制,每個分處理器都需要配備時鐘震蕩電路為其提供時鐘信號。因此,本文選擇了有源晶振電路為微控制器提供時鐘信號,以減少時鐘電路的重復性。選擇的有源晶振型號是SCO-700,它是大小為11.0592MHz的貼片晶振。有源晶振電路的連接比較簡單,電源端需要連接一個0.01μF的電容給電源濾波,輸出端需要連接一個100Ω的電阻用于過濾信號。
6、電源模塊
在利用自校準系統校準傳感器時,需要給傳感器提供電壓保證其正常工作,才能實現傳感器的校準。因此電源的正確選擇對測試的成功與否,也起到了關鍵作用。程控模塊電源采用先進的開關電源技術,實現高功率密度輸出,精致的設計確保了輸出低噪聲,是理想的功率電壓源、電流源。市場上常見的傳感器供電電壓多為5V、12V、24V,為了滿足對多種傳感器的供電電壓的要求,需要選擇一個寬電壓輸出的電源,既能滿足多種電壓的供應需求,又能遠程控制電源電壓的設置、輸出等。本文選用DH1765-1單路程控直流穩壓穩流電源。
四、系統軟件設計
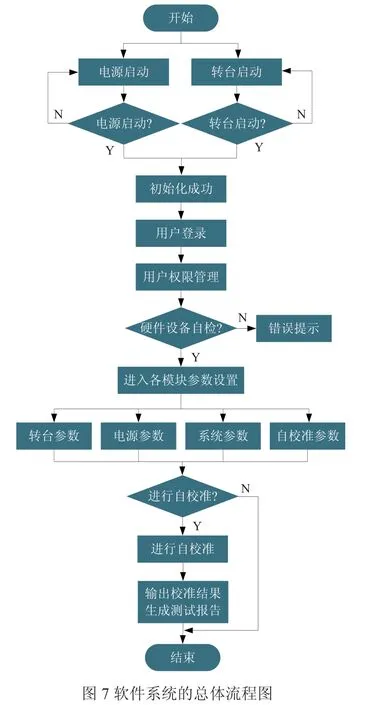
在自校準系統中,軟件是使其正常工作,連接其他功能部件的基礎和紐帶。自校準系統的軟件程序運行于上位機中,該程序是實現本系統自動校準傾角傳感器的人機交互接口。該系統軟件的主要功能是通過上位機將三軸轉臺、程控電源、傳感器三部分有機地結合在一起,從而實現對轉臺、電源的控制,對傳感器數據采集等一系列自動化過程。總體軟件設計流程圖,如圖7所示。
首先檢驗電源和轉臺是否啟動,隨后啟動完畢登錄系統軟件,進行用戶管理、轉臺、電源、傳感器參數設置,設置完畢后進行自校準,輸出校準結果和測試報告。
五、校準數據算法
在傾角傳感器的自校準系統中,對傳感器的校準精度要求很高,因此怎樣在大量的數據中計算出最合適的校準數據,來進行補償,是自校準系統的一個非常重要的環節。為了獲得校準數據x就需要知道輸入角度與輸出角度。假設輸入角度為θ,由于存在隨機干擾問題[6],那么所得到的測量角度結果是一個范圍[θ0,θ1]。當我們取不同角度θx作為該角度的測量值時,產生的補償數據θ-θx也就不同,同時補償后獲得的新測量角度的范圍也就不相同,即 [(θ0+θ-θx),(θ1+θ-θx)](補償前后是同一組測量數據)。此時在輸入角度為θ時的最大誤差θmax為:

經過推到可知,當θx取時的值為接近真實值的數據。
六、實驗驗證
1、單軸傾角傳感器的校準
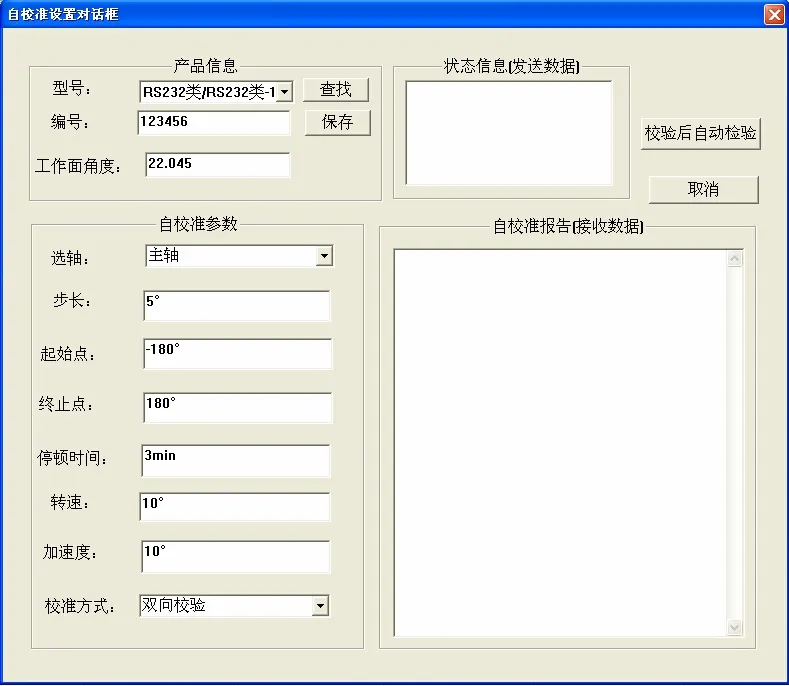
單擊菜單欄上的自校準設置,在彈出的自校準對話框中填寫相應的內容。因為傳感器的通信接口為標準的RS232接口,在產品信息欄處,選擇型號為RS232類,編號為123456;自校準參數設置中,由于是單軸傾角傳感器,所以軸向選擇為主軸,步長為5°,測試角度的起始點為-180°,終止點為+180°,停頓時間為3min,轉速為10°/s,加速度為10°/s2,校準方式選擇為雙向校準,界面如圖8所示。
參數設置完畢后,單擊自校準按鈕,系統就會進行傳感器的自動校準,此時,轉臺開始工作,轉臺轉過的角度、傳感器檢測到的當前角度值會在自校準數據接收框內顯示出來。
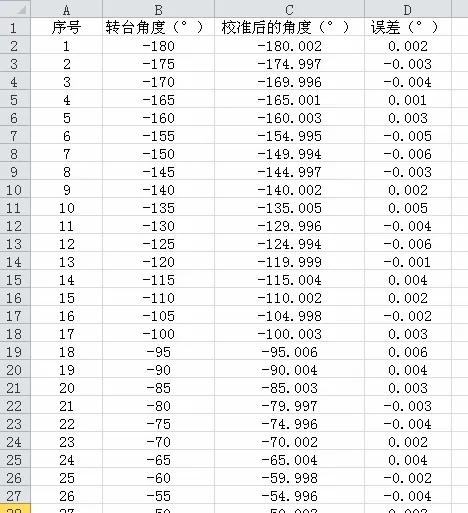
自校準報告包括兩列數據,第一列為轉臺反饋回來的角度,第二列為校準后傳感器測量到的角度。由于測量范圍是-180°~+180°,測量的步長為5°,所以報告顯示一共73個點。測試完成以后,測試數據會自動保存。那么,單軸360°自校準測試結果的部分數據誤差圖截圖如圖9所示。
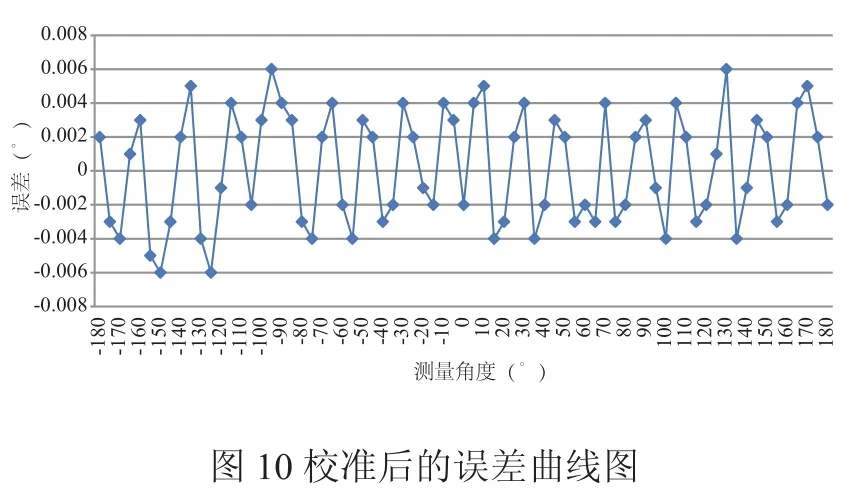
圖9中第一列為轉臺轉過的角度,第二列為傳感器測量到的角度,第三列為校準后傳感器測量結果的誤差。由圖中的誤差可知,測量結果的最大誤差為0.006°,與測量結果只有千分之六的偏差。平均誤差為0.003231°,線性度為0.00023°。校準后的測量誤差曲線圖如圖10所示,由縱坐標的數量級可以看出,誤差較小,校準以后的精度比較高。
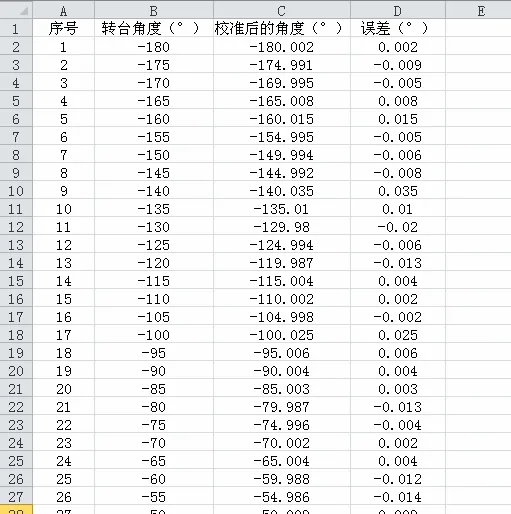
由于轉臺也可手動轉動,因此可用手動校準的方法對傳感器進行校準。為了與自動校準形成對比,規定手動校準量程范圍為-180°~+180°,測量的步長為5°,一共73個點,手動校準部分的數據誤差如圖11所示。
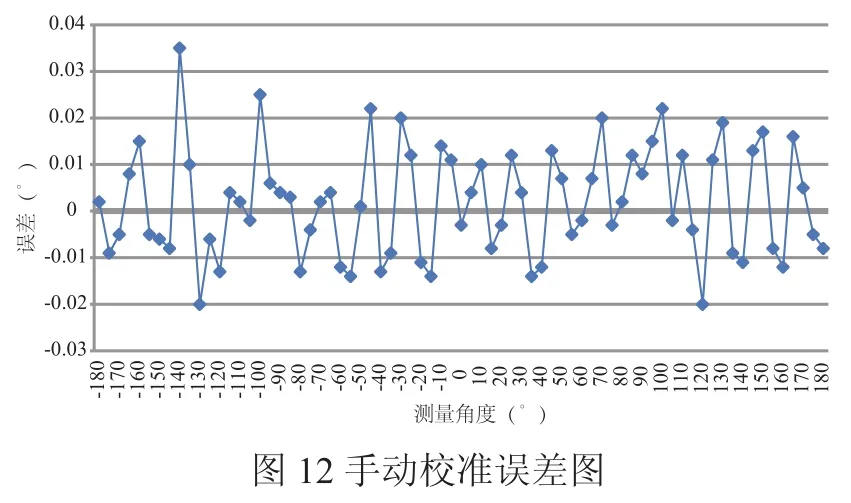
由于是手動校準在計算時,如果選取的數據量大,工作人員計算時工作量很大,因此取點比較少。由圖11可知,手動校準的數據誤差變化的跳躍性比較大,最大誤差達到0.035°,平均誤差為0.034154°,線性度為0.0017°。手動校準誤差曲線圖如圖12所示,由圖可以看到,縱坐標的數量級明顯比自動校準的高,誤差浮動大,明顯比自動校準的誤差稍大。
對比自動校準和人工校準,首先,在原始數據的提取上,自動校準由于是計算機按照預定算法進行計算,因此可以大量取值。但是人工校準由于時間和效率的問題,如果取大量數據工作人員的計算量會特別大,因此只能取少量數值,然而這將會影響最后的測量結果。其次,對比最后的校準結果,可以看出自動校準精度可以達到千分之幾,人工校準的精度相對來說比較低一點。最后根據結果可知,該系統能夠對接口為RS232的單軸傾角傳感器進行自校準,可以達到360°的校準范圍,校準精度較高。
六、結論
本系統能夠對不同接口、不同型號的傳感器進行全方位的測量以及高精度的校準,將校準和測試合為一體,既減少了工序,又縮短了校準時間,大大地提高了校準效率和校準精度,具有非常高的實用價值。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00