微機(jī)電執(zhí)行器的設(shè)計(jì)與分析
2016-11-29 13:54:08史春景鄧炬鋒郝永平劉雙杰
制造業(yè)自動(dòng)化 2016年2期
關(guān)鍵詞:分析設(shè)計(jì)
史春景,鄧炬鋒,郝永平,劉雙杰
(沈陽理工大學(xué) CAD/CAM技術(shù)研究與開發(fā)中心,沈陽 110159)
數(shù)字信號處理
微機(jī)電執(zhí)行器的設(shè)計(jì)與分析
史春景,鄧炬鋒,郝永平,劉雙杰
(沈陽理工大學(xué) CAD/CAM技術(shù)研究與開發(fā)中心,沈陽 110159)
基于發(fā)射過程引信保險(xiǎn)機(jī)構(gòu)的工作原理,設(shè)計(jì)一種應(yīng)用雙環(huán)境力下的MEMS保險(xiǎn)機(jī)構(gòu)。在后坐力和離心力作用下,建立相應(yīng)的動(dòng)力學(xué)模型,研究了影響保險(xiǎn)機(jī)構(gòu)工作的因素。應(yīng)用ADAMS軟件,對MEMS保險(xiǎn)機(jī)構(gòu)進(jìn)行動(dòng)力學(xué)仿真分析,得到相應(yīng)的運(yùn)動(dòng)曲線。計(jì)算結(jié)果表明,后坐滑塊能夠在后坐環(huán)境下可靠執(zhí)行動(dòng)作并運(yùn)動(dòng)到位,離心滑塊能夠在在離心環(huán)境、延時(shí)電路和拔銷器的配合下達(dá)到設(shè)計(jì)要求的延時(shí)時(shí)間并能夠可靠運(yùn)動(dòng)到位,并且離心滑塊的閉鎖機(jī)構(gòu)是合理的。同時(shí)安全保險(xiǎn)機(jī)構(gòu)在勤務(wù)處理時(shí)是安全可靠的。
引信;MEMS;環(huán)境力;動(dòng)力學(xué)模型;動(dòng)力學(xué)分析;可靠;合理性
0 引言
在國防現(xiàn)代化的進(jìn)程中,武器逐步向微型化、智能化的方向發(fā)展,這就促使引信正在向靈巧化、智能化、小型化的方向發(fā)展[1]。針對引信MEMS的小型化,需要突破高可靠性的安全保險(xiǎn)機(jī)構(gòu)的設(shè)計(jì)[2]。早期雙環(huán)境下的MEMS引信安全保險(xiǎn)裝置是在1998年Charles H Robinson發(fā)表的美國專利提出的[3]。在此基礎(chǔ)上Charles H Robinson提出了新的改進(jìn)結(jié)構(gòu)。這也推動(dòng)者國內(nèi)安全保險(xiǎn)機(jī)構(gòu)的發(fā)展,張繼桃提出單環(huán)境下的安全保險(xiǎn)機(jī)構(gòu)[4]。這些機(jī)構(gòu)為進(jìn)一步的研究尊定了基礎(chǔ)。隨著鐘表延時(shí)機(jī)構(gòu)的加工成本和工藝難度,本文提出一種雙環(huán)境下的鎳制MEMS保險(xiǎn)機(jī)構(gòu),用延時(shí)電路和拔銷器代替鐘表延時(shí)機(jī)構(gòu)[5]。同時(shí)與單環(huán)境下的安全保險(xiǎn)機(jī)構(gòu)相比,具有更加可靠性和安全性的特點(diǎn)。這不僅為以后MEMS執(zhí)行器理論的研究和應(yīng)用提供參考依據(jù),同時(shí)也為MEMS執(zhí)行器在引信方面的應(yīng)用奠定了一定的基礎(chǔ)。
1 機(jī)構(gòu)基本工作原理
保險(xiǎn)機(jī)構(gòu)的整體結(jié)構(gòu),如圖1所示。彈丸受發(fā)射藥燃燒產(chǎn)生火藥氣體的作用,從而產(chǎn)生極大的加速度,使安保機(jī)構(gòu)受到后坐力的作用。在后坐力的作用下,后坐滑塊平行于彈軸向下運(yùn)動(dòng)并使鎖頭鎖死在基板底端。在彈丸做直線運(yùn)動(dòng)時(shí),使彈丸旋轉(zhuǎn),從而產(chǎn)生旋轉(zhuǎn)加速度,使安保機(jī)構(gòu)產(chǎn)生離心力,轉(zhuǎn)銷在離心力的作用下解除對離心滑塊的限制。當(dāng)彈丸出炮口之后,激活延時(shí)電路,延時(shí)電路控制拔銷器,使拔銷器解除對離心滑塊的限制。離心滑塊在離心力的作用下運(yùn)動(dòng)到如圖1所示基板右端的鎖槽。最后,離心滑塊激活傳爆序列,實(shí)現(xiàn)執(zhí)行器的功能。這樣一系列動(dòng)作的完成,實(shí)現(xiàn)對執(zhí)行器的設(shè)計(jì)。

圖1 保險(xiǎn)機(jī)構(gòu)
2 系統(tǒng)運(yùn)動(dòng)學(xué)分析
2.1后坐滑塊的運(yùn)動(dòng)分析
為了找到影響后坐滑塊運(yùn)動(dòng)的各個(gè)相關(guān)因素,對后坐機(jī)構(gòu)進(jìn)行力學(xué)分析,如圖2所示。

圖2 后坐滑塊的受力分析
S型懸臂梁豎直方向彈性系數(shù)系數(shù)計(jì)算公式如下[6]:

其中E為懸臂梁使用材料的彈性模量,b為懸臂梁線寬,h為懸臂梁厚度,R為懸臂梁彎曲半徑,L為懸臂梁線長,p為單元數(shù)。
由圖2的受力分析和動(dòng)能定理,可得:
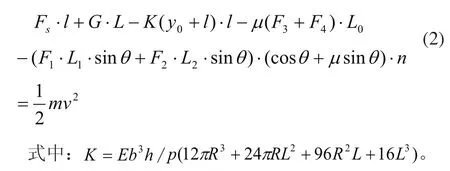
其中m為后坐滑塊的質(zhì)量,F(xiàn)S為后坐力,G后坐滑塊的重力,F(xiàn)3為左側(cè)蛇形齒齒頂對后坐滑塊側(cè)壁的正壓力,F(xiàn)4為右側(cè)蛇形槽齒頂對后坐滑塊側(cè)壁的正壓力,F(xiàn)1為右側(cè)蛇形齒對右側(cè)后坐滑塊齒面的正壓力,F(xiàn)2為左側(cè)蛇形齒對左側(cè)后坐滑塊齒面的正壓力,y0為S型懸臂梁預(yù)拉的位移,μ為后坐滑塊與基板的摩擦系數(shù),θ為蛇形齒齒頂角的一半,l為鎖頭沒有碰撞鎖槽前后坐滑相對基板塊移動(dòng)的豎直位移,L0為蛇形齒齒頂與后坐滑塊側(cè)壁相互摩擦?xí)r后坐滑塊相對基板移動(dòng)的豎直位移,n為單側(cè)蛇形齒的的個(gè)數(shù);L1為左側(cè)蛇形齒中一個(gè)齒的齒邊與后坐滑塊相互作用的長度,L2為右側(cè)蛇形齒中一個(gè)齒的齒邊與后坐滑塊相互作用的長度,v為鎖頭沒有碰撞鎖槽前的速度。
后坐滑塊能否按預(yù)期完成任務(wù)主要取決于實(shí)際速度的大小。由式(2)知,K、L1、L2、θ和n的大小決定著速度的大小。S型懸臂梁豎直方向彈性系數(shù)系數(shù)計(jì)算公式的分析[7]可知,線寬b主要決定著彈性系數(shù)的大小。通過減小線寬b,減小彈性系數(shù),進(jìn)而可以實(shí)現(xiàn)較大的速度,確保后坐滑塊能夠運(yùn)動(dòng)到位,實(shí)現(xiàn)解除對隔爆板的限制。同時(shí)L1、L2、θ和n的大小也決定著后坐滑塊的速度,而L1、L2、θ和n是由蛇形齒決定的。因此,合理的選擇蛇形齒參數(shù)和線寬b,有利于后坐滑塊運(yùn)動(dòng)到位。
在ADAMS中,由式(1)調(diào)節(jié)S型懸臂梁的彈性系數(shù)K=1.022×10-3N/mm,預(yù)拉力5.13×10-4N,設(shè)置設(shè)計(jì)參數(shù)后坐加速度1500g,轉(zhuǎn)速20r/s。進(jìn)行系統(tǒng)部分中后坐滑塊的仿真,仿真時(shí)間設(shè)置100ms,得到后坐滑塊運(yùn)動(dòng)的位移—時(shí)間曲線如圖3所示。
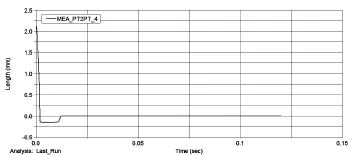
圖3 后坐滑塊的位移-時(shí)間曲線
由圖3可知,隨著時(shí)間的增大,后坐滑塊的位移先減小后增大,增大到一定值后成為一恒定常數(shù)。同時(shí)后坐滑塊運(yùn)動(dòng)到底部時(shí),所需時(shí)間為2.8ms。說明后坐滑塊能夠運(yùn)動(dòng)到位。由圖3和式(2)可知,后坐力較大時(shí),后坐滑塊向下運(yùn)動(dòng),一直運(yùn)動(dòng)到鎖槽底部,一定時(shí)間以后,隨著后坐力的減小,S型懸臂梁的拉力大于后坐力,S型懸臂梁回拉,后坐滑塊位移增大,實(shí)現(xiàn)閉鎖機(jī)構(gòu)閉合。圖3驗(yàn)證了式(2)的合理性,也驗(yàn)證了后坐滑塊和閉鎖機(jī)構(gòu)設(shè)計(jì)的合理性。
2.2離心滑塊的運(yùn)動(dòng)分析
轉(zhuǎn)銷和離心滑塊開始工作時(shí),轉(zhuǎn)銷和離心滑塊的受力情況如圖4和圖5所示。

圖4 轉(zhuǎn)銷的受力分析

圖5 離心滑塊的受力分析
由離心滑塊受到的離心力F1,轉(zhuǎn)銷受到的離心力F2,可得到式(5)和式(6)。


其中m1為離心滑塊的質(zhì)量,m2為轉(zhuǎn)銷的質(zhì)量,r1為離心滑塊的質(zhì)心與彈軸水平方向的距離,r2為轉(zhuǎn)銷的質(zhì)心與彈軸水平方向的距離,IC為轉(zhuǎn)銷的轉(zhuǎn)動(dòng)慣量,r3為轉(zhuǎn)銷質(zhì)心到轉(zhuǎn)銷轉(zhuǎn)軸的豎直距離,r4為轉(zhuǎn)銷質(zhì)心到轉(zhuǎn)銷轉(zhuǎn)軸的水平距離,F(xiàn)f為離心滑塊受到基板的摩擦力,F(xiàn)3為離心滑塊受到轉(zhuǎn)銷的阻力。
當(dāng)彈軸在轉(zhuǎn)銷質(zhì)心左側(cè)時(shí),轉(zhuǎn)銷受到的離心力方向與圖4相反,故轉(zhuǎn)銷在重力和離心力的作用下會(huì)發(fā)生回復(fù)。當(dāng)彈軸在離心滑塊質(zhì)心右側(cè)時(shí),離心滑塊受到的離心力方向與圖5相反,故離心滑塊不會(huì)運(yùn)動(dòng)到位。由圖5和圖6的受力分析可知,當(dāng)彈軸在轉(zhuǎn)銷質(zhì)心和離心滑塊質(zhì)心之間時(shí),可能會(huì)滿足轉(zhuǎn)銷不回復(fù)和離心滑塊運(yùn)動(dòng)到位。轉(zhuǎn)銷運(yùn)動(dòng)到位并不發(fā)生回復(fù),離心滑塊運(yùn)動(dòng)到位是機(jī)構(gòu)可靠工作的前提,而轉(zhuǎn)銷和離心滑塊能否按預(yù)期完成任務(wù)主要取決于其轉(zhuǎn)銷的角加速度和離心滑塊運(yùn)動(dòng)的加速度。根據(jù)式(3)~式(6)可知,r1和r2越大,轉(zhuǎn)銷的角加速度越大,離心滑塊的加速度越大,轉(zhuǎn)銷越不容易回復(fù),轉(zhuǎn)銷和離心滑塊越容易運(yùn)動(dòng)到位。綜上可得,彈軸位置在轉(zhuǎn)銷質(zhì)心和離心滑塊質(zhì)心之間,同時(shí)合理的彈軸位置有利于轉(zhuǎn)銷不發(fā)生回復(fù),有利于轉(zhuǎn)銷和離心滑塊能夠運(yùn)動(dòng)到位。
為了實(shí)現(xiàn)離心滑塊的運(yùn)動(dòng),還必須解除拔銷器對離心滑塊的限制。拔銷器的控制是需要電流的激活才能使拔銷器拔出,這就需要電路來激活拔銷器。但是激活拔銷器的具體時(shí)間是至關(guān)重要的。這就通過加速度計(jì)來識別后坐加速度,在達(dá)到預(yù)定的加速度值后激活后續(xù)電路。如圖6所示為加速計(jì)的工作原理圖。調(diào)節(jié)電源電壓,使可移動(dòng)框架移動(dòng),同時(shí)在加速度方向受到后坐力的作用下,使加速度計(jì)輸出信號,并配合延時(shí)電路,進(jìn)而激活拔銷器。根據(jù)不同的后坐加速度調(diào)節(jié)相應(yīng)的電壓,使之一一對應(yīng),進(jìn)而實(shí)現(xiàn)對后坐加速度的感知,激活拔銷器。

圖6 加速度計(jì)原理圖
9ms之后彈丸出炮口,在ADAMS軟件中仿真,選取r1=1.58mm,r2=0.22mm,在加速度計(jì)的作用下拔銷器在62.5ms時(shí)工作,轉(zhuǎn)速20r/s持續(xù)工作。得到轉(zhuǎn)銷的轉(zhuǎn)角-時(shí)間的曲線圖和離心滑塊的位移—時(shí)間曲線,如圖7和圖8所示。

圖7 轉(zhuǎn)銷的轉(zhuǎn)角—時(shí)間曲線圖

圖8 離心滑塊的位移—時(shí)間曲線
由圖7可知,在0~9ms時(shí),轉(zhuǎn)銷的轉(zhuǎn)銷為0°;在9ms~11.76ms時(shí),轉(zhuǎn)銷的轉(zhuǎn)角隨著時(shí)間的增大而逐漸減小;在大于等于11.76ms時(shí),轉(zhuǎn)角減小為一個(gè)恒定值23.1°。9ms大于2.8ms,說明在后坐滑塊運(yùn)動(dòng)到位以后,轉(zhuǎn)銷由靜止開始運(yùn)動(dòng),當(dāng)t=11.76時(shí)轉(zhuǎn)銷在離心力的作用下轉(zhuǎn)動(dòng)到位。驗(yàn)證了式(4)和式(5)作為設(shè)計(jì)依據(jù)的合理性,同時(shí)驗(yàn)證了彈軸位置設(shè)計(jì)的合理性。
由圖8可知,在0~65ms時(shí),離心滑塊為一恒定位移值3.2mm;在65ms~79ms時(shí),離心滑塊的位移隨著時(shí)間的增大而逐漸減小;在大于等于79ms時(shí),位移減小為0。65ms大于62.5ms,說明在拔銷器拔出以后,離心滑塊由靜止開始運(yùn)動(dòng),當(dāng)t=79ms時(shí)離心滑塊在離心力的作用下運(yùn)動(dòng)到位。驗(yàn)證了式(3)和式(6)設(shè)計(jì)依據(jù)的合理性,同時(shí)驗(yàn)證了彈軸位置設(shè)計(jì)的合理性。
2.3閉鎖機(jī)構(gòu)的運(yùn)動(dòng)分析
為了實(shí)現(xiàn)離心滑塊的有效閉鎖即離心滑塊不發(fā)生回復(fù)。根據(jù)彈軸的持續(xù)的轉(zhuǎn)速(20r/s)特點(diǎn),設(shè)計(jì)出的閉鎖機(jī)構(gòu),如圖9所示。離心滑塊的鎖頭與側(cè)壁1摩擦垂直于彈軸向右運(yùn)動(dòng),離心滑塊受到持續(xù)存在的離心力作用,離心滑塊繼續(xù)運(yùn)動(dòng),鎖頭與側(cè)壁2摩擦向右運(yùn)動(dòng),實(shí)現(xiàn)離心滑塊與鎖槽錯(cuò)位相對,形成閉鎖機(jī)構(gòu),實(shí)現(xiàn)離心滑塊可靠鎖定,不發(fā)生回復(fù)。

圖9 離心滑塊的閉鎖機(jī)構(gòu)
由圖9和工作原理可得閉鎖機(jī)構(gòu)的動(dòng)力學(xué)方程:

其中f1為離心滑塊受到鎖槽側(cè)壁1的摩擦力,F(xiàn)N1為鎖槽側(cè)壁1對離心滑塊的正壓力,f2為離心滑塊受到鎖槽側(cè)壁2的摩擦力,F(xiàn)N2為鎖槽側(cè)壁2對離心滑塊的正壓力。
由式(7)知,離心滑塊的質(zhì)量和離心力一定時(shí),其運(yùn)動(dòng)的加速度取決于β1和β2。離心滑塊要運(yùn)動(dòng)到位,通過調(diào)節(jié)β1和β2。因此可以通過調(diào)節(jié)彈軸位置、β1和β2,進(jìn)而控制離心滑塊的運(yùn)動(dòng)。正如如圖8所示,在65ms~79ms時(shí),離心滑塊的位移隨著時(shí)間的增大而逐漸減小;在大于等于79ms時(shí),位移減小為0。說明離心滑塊閉鎖機(jī)構(gòu)設(shè)計(jì)的合理性。
離心滑塊加載1500g的轉(zhuǎn)速,鎖頭受到的應(yīng)力較大,在ANSYS軟件中進(jìn)行局部應(yīng)力分析,如圖10所示。

圖10 后坐滑塊閉鎖機(jī)構(gòu)的應(yīng)力圖
鎳材料的許用應(yīng)力為:

式中:n為安全系數(shù),一般取n=4~5。當(dāng)取σp=E/100,楊氏模量E=210GPa時(shí),由式(8)可計(jì)算出[σ]=420MPa~525MPa。由圖10可以看出后坐機(jī)構(gòu)的最大應(yīng)力為160MPa,小于鎳材料的許用應(yīng)力,不會(huì)發(fā)生失效。離心滑塊閉鎖機(jī)構(gòu)能夠抵抗1500g的轉(zhuǎn)速而不發(fā)生變形,說明閉鎖機(jī)構(gòu)設(shè)計(jì)的可靠性。
3 勤務(wù)處理安全可靠性分析
當(dāng)平時(shí)勤務(wù)處理時(shí),若遇偶然跌落到鋼板情況,分析跌落時(shí)的沖擊載荷對后坐滑塊的影響,在ADAMS中對機(jī)構(gòu)加載大小為15000G、持續(xù)時(shí)間為100μs的沖擊載荷,得到后坐滑塊距離基板鎖槽的位移—時(shí)間曲線如圖11所示。

圖11 后坐滑塊的位移—時(shí)間曲線
從圖11可以看出:隨著時(shí)間的增大,后坐滑塊的位移值先減小后增大,且增大的最大值為位移的初始值。說明在后坐滑塊解除對轉(zhuǎn)銷的限制后,后坐滑塊在S型懸臂梁拉力的作用下又返回到原初始位置。所以在平時(shí)勤務(wù)處理時(shí),當(dāng)后坐滑塊偶然運(yùn)動(dòng)到位時(shí)仍可以恢復(fù)到原位。所以硬著路跌落安全。這驗(yàn)證了后坐滑塊、蛇形槽和S型懸臂梁設(shè)計(jì)的合理性和執(zhí)行器的安全性。
4 結(jié)論
通過工作原理的分析,對后坐滑塊建立運(yùn)動(dòng)方程。通過受力分析和動(dòng)能定理建立影響后坐力G值的關(guān)系式,并得到K、d、a、c和n的大小決定著后坐力G值的大小。通過仿真分析,驗(yàn)證了運(yùn)動(dòng)方程和設(shè)計(jì)的合理性,并得到合理的選擇蛇形齒參數(shù)和線寬b,有利于后坐滑塊運(yùn)動(dòng)到位。對隔爆板和后坐滑塊建立運(yùn)動(dòng)方程,得到彈軸位置在轉(zhuǎn)銷質(zhì)心和離心滑塊質(zhì)心之間。通過仿真分析,驗(yàn)證了運(yùn)動(dòng)方程和設(shè)計(jì)的合理性,并得到合理的彈軸位置有利于轉(zhuǎn)銷不發(fā)生回復(fù),有利于轉(zhuǎn)銷和隔爆板能夠運(yùn)動(dòng)到位。對離心滑塊閉鎖機(jī)構(gòu)的分析可得,閉鎖機(jī)構(gòu)設(shè)計(jì)合理且具有高度的可靠性。通過勤務(wù)處理的分析可得,該執(zhí)行器具有可靠性。
[1] 李玲,賈志軍.激光引信新技術(shù)研究[J].現(xiàn)代電子技術(shù).2010:23-28.
[2] 馮鵬洲,朱繼南,吳志亮.美國典型MEMS引信安全保險(xiǎn)裝置分析[J].探測與控制學(xué)報(bào).2007:26-30.
[3] Charles H Robinson, Sliver Spring. Microelectromechanical Systems Safe and Arm Apparatus[P].United States Patent. USP6558329B1.2003:14-25(in chinese).
[4] 張繼桃.基于MEMS的安全解除保險(xiǎn)機(jī)構(gòu)的設(shè)計(jì)與試驗(yàn)研究[D].沈陽:沈陽理工大學(xué),2012.
[5] 李占旭,郝永平,紀(jì)玉杰,馬洪遠(yuǎn).MEMS引信鐘表機(jī)構(gòu)延時(shí)設(shè)計(jì)的研究[J].機(jī)械設(shè)計(jì)與制造,2011,12:207-208.
[6] 李華,石庚辰,何光.MEMS加工誤差對微彈簧力學(xué)特性的影響分析[J].壓電與聲光,2009,10.
[7] 安曉紅,張亞,顧強(qiáng).引信設(shè)計(jì)與應(yīng)用[M].北京:國防工業(yè)出版社, 2006.
[8] 吳志亮,常娟,馮鵬洲,朱繼南.引信用MEMS平面微彈簧彈性系數(shù)分析[J].南京理工大學(xué)學(xué)報(bào),2008,32(2):140-143.
[9] 曹成茂,張河,丁立波.MEMS技術(shù)在引信中的應(yīng)用研究[J].測控技術(shù),2004,23(10):6-7.
[10] 石庚辰,李華.引信MEMS安全系統(tǒng)研究[J].探測與控制學(xué)報(bào),2007,29(6):1-5.
[11] 席占穩(wěn),聶偉榮.電磁驅(qū)動(dòng)的引信MEMS解除保險(xiǎn)機(jī)構(gòu)[J].探測與控制學(xué)報(bào),2009,31(5):1-4.
Design and analysis of the micro-electromechanical actuator
SHI Chun-jing, DENG Ju-feng, HAO Yong-ping, LIU Shuang-jie
TH122
A
1009-0134(2016)02-0005-04
2015-10-11
國家863項(xiàng)目(2015AA042701)
史春景(1968 -),男,副教授,研究方向?yàn)橹饕獜氖翸EMS和制造業(yè)信息化等領(lǐng)域的研究工作。
猜你喜歡
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2018年18期)2018-11-14 01:48:24
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06