可穿戴式機(jī)械助力腿的研究與設(shè)計(jì)
2016-11-29 13:54:46安愛博
制造業(yè)自動(dòng)化 2016年2期
馬 超,安愛博,王 浩
(遼寧工業(yè)大學(xué) 機(jī)械學(xué)院,錦州 121001)
可穿戴式機(jī)械助力腿的研究與設(shè)計(jì)
馬 超,安愛博,王 浩
(遼寧工業(yè)大學(xué) 機(jī)械學(xué)院,錦州 121001)
提出了一種可穿戴式機(jī)械助力腿的設(shè)計(jì)方案與結(jié)構(gòu)。該機(jī)械助力腿主要由鋁合金型材和樞軸聯(lián)接組成“類外骨骼”機(jī)架,由氣缸、氣泵、電磁閥完成動(dòng)力輸出,由單片機(jī)控制系統(tǒng)和氣缸的磁環(huán)來完成自動(dòng)控制,該裝置結(jié)構(gòu)簡單、成本低廉、通用性好,具有一定的推廣價(jià)值。
可穿戴式機(jī)械助力腿;“類外骨骼”機(jī)架;單片機(jī)
0 引言
下肢外骨骼是一種新型的具有可穿戴性能的機(jī)械裝置,從人機(jī)一體化智能系統(tǒng)理論的觀點(diǎn)出發(fā),它是一種人主機(jī)輔的人機(jī)一體化系統(tǒng)[1]。這種技術(shù)在許多領(lǐng)域有著良好的應(yīng)用前景,在軍事領(lǐng)域,已開發(fā)出可用于單兵作戰(zhàn)的外骨骼機(jī)器人,幫助提升士兵的載彈量和運(yùn)動(dòng)能力;在民用領(lǐng)域,可用于病人復(fù)健、旅游、救災(zāi)等等。
本文所研究的是一種結(jié)構(gòu)簡單、經(jīng)濟(jì)實(shí)用的可穿戴式機(jī)械助力腿,通過桿機(jī)構(gòu)的設(shè)計(jì),將受力點(diǎn)作用在機(jī)械腿上,可令使用者在操作過程中,盡可能的減少體力損耗,也能防止在工作過程中出現(xiàn)勞動(dòng)損傷。該設(shè)計(jì)可應(yīng)用于物流、醫(yī)療、軍用、保健等多個(gè)行業(yè),前景十分廣闊。
1 可穿戴式機(jī)械助力腿的總體設(shè)計(jì)
1.1設(shè)計(jì)目的
目前已有的“助力機(jī)械”多采用電動(dòng)或者液壓裝置作為動(dòng)力機(jī)構(gòu),其造價(jià)昂貴,結(jié)構(gòu)復(fù)雜,很多“助力機(jī)械”還需要加入價(jià)格不菲的檢測設(shè)備,整體的造價(jià)很高,設(shè)備的維修、保養(yǎng)等也很困難,這就大大限制了其使用范圍。目前此類設(shè)備多局限在軍用、科研方面,在民用尤其是快遞、物流運(yùn)輸方面的應(yīng)用極少。因此,對“助力機(jī)械”的研究制作重點(diǎn)就是設(shè)計(jì)一種結(jié)構(gòu)簡單、價(jià)格低廉、操作方便、安全可靠的被動(dòng)式機(jī)械,此外還應(yīng)達(dá)到以下設(shè)計(jì)目標(biāo):
1)機(jī)構(gòu)體積要盡可能的精巧,要節(jié)省空間,還應(yīng)便于承載貨物;
2)增大標(biāo)準(zhǔn)件、通用零件的使用率,減少非標(biāo)零件的使用,從而減小采購的難度,降低制造、維修成本;
3)考慮到氣動(dòng)的功率限制,至少要設(shè)備能夠提供0.5~1倍的助力功能;
4)“助力機(jī)械”與人體的接合要強(qiáng)調(diào)舒適性和安全性。
1.2總體設(shè)計(jì)方案
可穿戴式機(jī)械助力腿的方案如圖1所示,主要由機(jī)械部分、動(dòng)力部分、控制部分和安全綁帶組成。
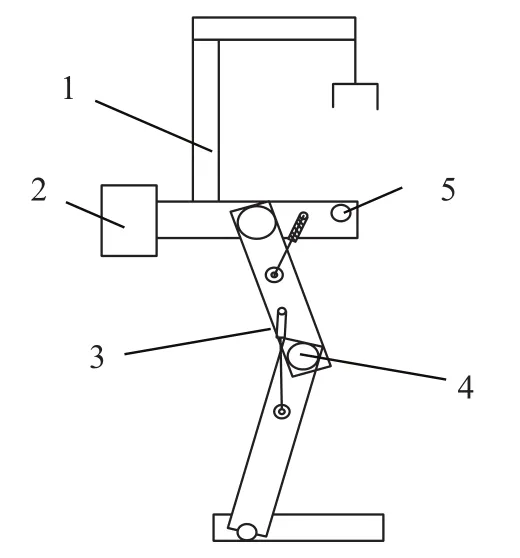
圖1 可穿戴式機(jī)械助力腿方案簡圖
1)機(jī)械部分的機(jī)架主體全部由40×40鋁合金型材聯(lián)接而成,其結(jié)構(gòu)簡單、強(qiáng)度較高、通用性好。在髖部、膝部、踝部,由于需要形成相對轉(zhuǎn)動(dòng),因此采用了鋁合金樞軸來進(jìn)行聯(lián)接;
2)動(dòng)力部分由大功率蓄電池、微型氣泵、電磁閥和氣缸組成。大功率蓄電池、微型氣泵、電磁閥安裝在機(jī)械腿髖部后方的支架上,氣缸安裝在機(jī)械腿的大腿部和小腿部,在氣泵的帶動(dòng)下伸出或者縮回,從而帶動(dòng)使用者的腿部運(yùn)動(dòng);
3)控制部分采用單片機(jī)作為控制器,通過手部的開關(guān)來完成程序的切換,通過氣缸上的磁環(huán)來檢測助力腿是否到達(dá)預(yù)定位置;
4)為了方便操作者的穿戴,在腰部設(shè)置了安全綁帶,在腿部安裝了粘扣。安全綁帶和粘扣均可手動(dòng)調(diào)節(jié),身高在170cm~180cm之間,體重在55kg~80kg范圍內(nèi)的使用者均可視自身?xiàng)l件調(diào)節(jié)使用(如圖2所示)。

圖2 可穿戴式機(jī)械助力腿實(shí)物圖
1.3工作原理
為了提升機(jī)械助力腿的功能,該機(jī)械助力腿設(shè)定了三個(gè)運(yùn)行程序:直立、步行、登樓。通過在每個(gè)氣缸的最短位置(完全縮回)、中間位置和最長位置(完全伸出)設(shè)置檢測磁環(huán),利用磁環(huán)檢測的信號來完成程序的控制,其中中間位置的磁環(huán)可以根據(jù)使用者的身體狀況進(jìn)行調(diào)整。以步行狀態(tài)為例,其工作過程如下:
1)電磁閥控制左腿上下氣缸伸出,右腿上下氣缸縮回;
2)當(dāng)左腿氣缸的無桿腔極限位置和右腿氣缸的中間極限位置信號到位后切換程序;
3)右腿氣缸伸出,左腿氣缸縮回;
4)當(dāng)右腿氣缸的無桿腔極限位置和左腿氣缸的中間極限位置信號到位后切換回原程序。
在上述程序的循環(huán)作用下,機(jī)械助力腿的左右兩腿就可以完成交替的伸縮,從而模擬人類行走的步態(tài)。登樓狀態(tài)的程序控制方案與步行基本相同,僅是將中間位極限信號更改為有桿腔極限位置信號。直立狀態(tài)為程序的初始狀態(tài),單片機(jī)接通電源后,所有氣缸均完全伸出,從而保持直立狀態(tài)。
2 結(jié)構(gòu)設(shè)計(jì)
2.1氣缸聯(lián)接件的設(shè)計(jì)
氣缸聯(lián)接件的主要作用是將氣缸的兩個(gè)端部固定在鋁合金型材上。一端與氣缸的Y型接頭聯(lián)接,另一端要與氣缸的尾孔聯(lián)接,另外還要考慮要在此處形成轉(zhuǎn)動(dòng)副以及防止結(jié)構(gòu)的干涉等因素。因此在設(shè)計(jì)中采用階梯設(shè)計(jì),并在底部制作長條孔,用普通螺栓配T型螺母進(jìn)行聯(lián)接;在中心采用螺紋孔配塞打螺絲來形成轉(zhuǎn)動(dòng)副。
2.2樞軸的設(shè)計(jì)
樞軸是機(jī)械腿能夠形成轉(zhuǎn)動(dòng)聯(lián)接的重要零件,在原設(shè)計(jì)中,樞軸底部設(shè)計(jì)為一個(gè)平面,與型材的端面直接接觸,這就形成兩個(gè)平面接觸而無周向定位,樞軸由于預(yù)緊不夠或聯(lián)接螺栓松動(dòng)就會(huì)轉(zhuǎn)動(dòng)失效;樞軸的轉(zhuǎn)動(dòng)副完全由螺栓桿和樞軸孔的間隙配合形成,螺栓一方面要承受載荷造成的剪切力,另一方面又要承受轉(zhuǎn)動(dòng)而造成的磨損,降低了螺栓的強(qiáng)度。在改進(jìn)設(shè)計(jì)中(如圖3所示),樞軸的底面增加了定位止口,與型材截面的槽口形成穩(wěn)定的周向定位;聯(lián)接螺栓擰緊在下方樞軸的螺紋孔中,安裝在上方樞軸的軸承上,以形成轉(zhuǎn)動(dòng)副。這樣的設(shè)計(jì)減小了螺栓轉(zhuǎn)動(dòng)中造成的磨損,經(jīng)實(shí)驗(yàn)證明,這種結(jié)構(gòu)設(shè)計(jì)更穩(wěn)定也更可靠。
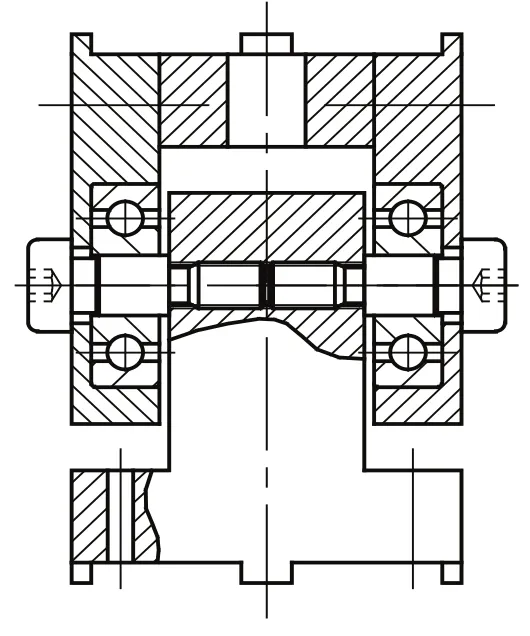
圖3 樞軸結(jié)構(gòu)示意圖
2.3零件的裝配
采用SolidWorks三維實(shí)體建模軟件,完成了各個(gè)零件的結(jié)構(gòu)設(shè)計(jì)并采用自下而上的裝配方式,完成機(jī)械助力腿的整機(jī)裝配,裝配效果如圖4所示。

圖4 可穿戴式機(jī)械助力腿裝配圖
【】【】
3 設(shè)計(jì)中存在的不足
1)采用的微型氣泵功率較小,助力能力有限;
2)樞軸只能完成平面轉(zhuǎn)動(dòng),空間轉(zhuǎn)動(dòng)能力較弱,在使用時(shí)需要操作者自身對機(jī)構(gòu)的平衡性進(jìn)行調(diào)整;
3)可增加上肢助力設(shè)計(jì),拓展功能。
4 結(jié)束語
設(shè)計(jì)了一種實(shí)用、便利、高效的被動(dòng)式機(jī)械腿助力機(jī)構(gòu),該助力腿采用鋁合金型材作為機(jī)架,結(jié)構(gòu)簡單、制造成本低、互換性好。該機(jī)構(gòu)以氣泵為動(dòng)力源,用氣缸帶動(dòng)機(jī)械腿完成各種動(dòng)作。使用者可根據(jù)自身的條件調(diào)整安全綁帶的位置、松緊,進(jìn)行適應(yīng)性調(diào)節(jié),使用方面,運(yùn)行可靠,能夠在連續(xù)前進(jìn)過程中實(shí)現(xiàn)機(jī)械助力。在2015年遼寧省普通高等學(xué)校本科大學(xué)生機(jī)械創(chuàng)新設(shè)計(jì)大賽中,該機(jī)構(gòu)獲得一等獎(jiǎng)。
[1] 陳鷹,楊燦軍.人機(jī)智能系統(tǒng)理論與方法[M].杭州:浙江大學(xué)出版社,2006.
[2] 孫 桓.機(jī)械原理[M].西安:高等教育出版社,2006.
[3] 濮良貴.機(jī)械設(shè)計(jì)[M].西安:高等教育出版社,2006.
[4] 機(jī)械設(shè)計(jì)手冊編委會(huì).機(jī)械設(shè)計(jì)手冊[M].北京:機(jī)械工業(yè)出版社,2005.
Research and design for wearable mechanical legs
MA Chao, AN Ai-bo, WANG Hao
TH122
B
1009-0134(2016)02-0145-02
2015-12-09
遼寧省普通高等教育本科教學(xué)改革研究一般項(xiàng)目(UPRP20140724)
馬超(1981 -),男,遼寧朝陽人,講師,碩士,研究方向?yàn)闄C(jī)械設(shè)計(jì)。
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
金橋(2020年9期)2020-10-27 01:59:44
中學(xué)生數(shù)理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
商周刊(2017年17期)2017-09-08 13:08:58
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
科技知識動(dòng)漫(2016年8期)2016-07-29 20:40:09
- 制造業(yè)自動(dòng)化的其它文章
- 環(huán)形轉(zhuǎn)子部件動(dòng)態(tài)特性測試實(shí)驗(yàn)研究
- 輪轂烘干線固定裝置設(shè)計(jì)與實(shí)現(xiàn)
- 基于支持向量回歸的整體翼梁結(jié)構(gòu)應(yīng)力強(qiáng)度因子預(yù)測技術(shù)
- 螺旋式提升機(jī)在物流規(guī)劃中的應(yīng)用
- 數(shù)控機(jī)床滾動(dòng)導(dǎo)軌結(jié)合面剛度的有限元分析
- 前橋擺轉(zhuǎn)轉(zhuǎn)向式四輪底盤液壓驅(qū)動(dòng)系統(tǒng)方案優(yōu)化設(shè)計(jì)的研究