測控設備故障診斷專家系統知識獲取方法研究
2016-11-28 01:29:32王小強李俊瑤臧全杰
微處理機 2016年5期
鄒 磊,王小強,李俊瑤,王 俊,臧全杰
(西安衛星測控中心,渭南714000)
測控設備故障診斷專家系統知識獲取方法研究
鄒磊,王小強,李俊瑤,王俊,臧全杰
(西安衛星測控中心,渭南714000)
在高密度的衛星測控任務下,測控設備自動化的程度越來越高,人力參與測控的依賴度逐步降低,但這卻對設備故障診斷定位的準確性、高效性提出了更高要求。而要提高自動化程度,減少設備停機維修時間,就必然需要增強測控設備故障診斷的水平,提升設備故障診斷專家系統的自動診斷能力。在故障診斷專家系統中,專家知識庫完備程度決定著系統診斷水平,診斷知識獲取則是知識庫的瓶頸。通過重點研究專家知識的獲取方法,以豐富專家系統知識庫為目的,提高專家系統故障快速定位診斷能力,達到減員增效的效果,促進衛星測控任務的順利執行,有效推動提升設備自動化水平。
高密度;測控;自動化;故障診斷;專家知識庫;知識獲取
1 引 言
實施衛星測控任務時,測控設備出現故障將嚴重影響任務執行工作。能否快速定位故障,采取相應處理手段和應急方案,解決設備故障,是保障任務能否圓滿完成的前提。在此背景下,測控設備故障診斷專家系統應運而生,它可快速定位故障發生位置,解決測控設備故障,減少甚至取代人工故障排除。專家系統一般包括知識獲取、知識表示、推理診斷三大功能,而知識獲取能力決定著專家系統的診斷水平[1-2]。但是領域專家提供的知識往往并不能滿足設備故障診斷的覆蓋率和診斷可靠性要求,尤其是現有測控設備雖然故障診斷系統得到重視,也有所研究,但實際應用效果卻達不到要求。主要是因為專家知識不全面、不系統,再者由于系統知識不能動態更新,因而導致故障診斷系統在測控領域實用效果并不明顯[3]。
一般故障頻發部件、發生周期都會隨著設備使用的不同階段而發生變化。在設備研制成型初期,由于設計、制作工藝等過程中存在的問題,故障率往往較高,故障解決周期長,這主要是由于新研設備狀態不穩定,測試還不夠完善等。在初期問題解決后,設備進入相對穩定期,這時故障發生率降低,且趨于常數,整體性能趨于穩定。而在設備接近使用壽命終結階段,由于設備老化、損耗等原因,故障發生概率增高,造成設備維護困難。這種設備故障發生概率隨整個設備使用周期所呈現出的故障曲線,形態上與浴盆極為相似,所以該曲線又稱之為“浴盆曲線”[4],如圖1所示。圖1中曲線I是早期故障期,II是偶然故障期,III是損耗故障期,對應于設備使用期故障發生的三個階段。因而在測控設備故障診斷專家系統中,專家知識除通過領域專家、經驗、模型等渠道獲取外,還需隨著設備使用的不同階段動態更新。
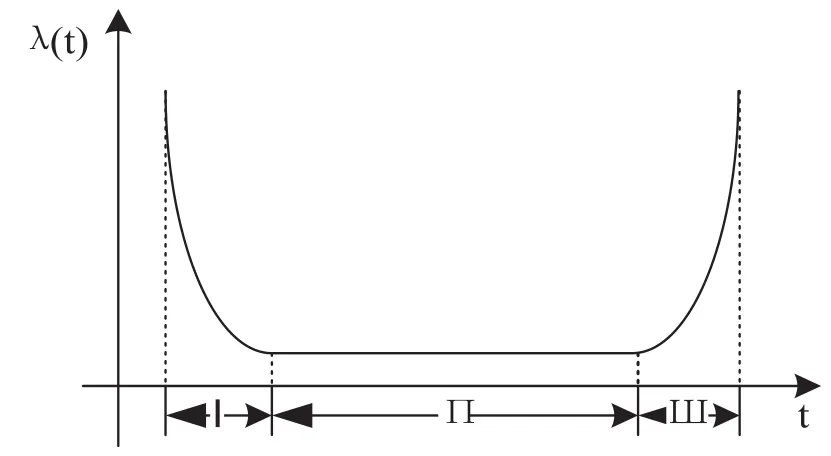
圖1 浴盆曲線
2 專家知識分類
研究無差別、通用性知識的測控設備專家知識是重點,為方便維護和錄入,選擇與測控設備型號無關的通用性信息。鑒于測控設備用于接收遙外測信息,作為接收數據和控制衛星通道的節點,結合專家系統中知識的一般性,將測控設備專家知識分類如下[5-6]:
經驗知識:領域專家長期在測控領域研制設備的實踐中積累得到的知識,包括故障征兆、故障原因、解決方案等。這種知識對故障排除效率較高,應用上較便捷。
狀態類知識:由設備傳感器、監視板等上報的狀態類知識,包括枚舉類(如加去電狀態、通信狀態、鏈路狀態、電源狀態等)、數值類(如電壓值、電流值、信噪比、溫度、信號幅度等)。該類知識是由設備頂層設計時經分析研討確定,可通過串口、網口等傳輸,實時監視設備狀態,定位故障點,但未考慮到的故障點則無法排查。
控制類知識:用于協調測控設備各分系統運作的策略性知識,提供咨詢意見、處理措施和維護解決策略等。可應用于自動化故障排查解決,提高設備的自動化能力,降低人工干預程度。
邏輯分析類知識:基于測控設備的構造、功能、信號流程等,通過建模、數學分析等手段獲得,涉及復雜的邏輯推理,具備強關聯性,并能對未知知識進行預測。
3 專家知識獲取
3.1傳統方法
主要獲取途徑是通過領域專家長期積累的經驗、領域知識,或長期積累的經驗公式、歸納總結以及數學反演等方法獲取的,再經由知識工程師利用一些手段轉化為機器可以理解的專家知識,存入專家知識庫[7],傳統獲取知識的方法如圖2所示。

圖2 傳統方法獲取專家知識
獲取后的知識規則表示形式一般為:If A then B,其中,A為故障征兆,B為故障結論。復雜形式(如故障可能由多個原因造成)則可表示為:If(A1 OR A2 OR A3…)then B或者If(A1 AND A2 AND A3…)then B,并由專門的語言解釋機制轉換為推理機可以識別的語言實現故障診斷。
(1)經驗積累
領域專家經過長期故障診斷實踐和對設備認知中不斷積累起來的經驗和知識,在設備故障排查中可直接給出故障原因,定位故障點,快速排除故障。由于是經驗知識,解決問題的效率較高。但設備維修經驗往往只有某幾個領域專家可以提供,隨著崗位調動或其它原因,這類積累的經驗知識也就流失了。
(2)歸納總結
操作人員設備維護、檢修中歸納總結的故障診斷專家知識,經過處理,以特定的方式進行存儲。故障針對性強,出現相似的故障可快速排查解決,對未知的問題則無法診斷。而且這種專家知識故障征兆和診斷結論之間可能并沒有較強的因果關系,邏輯上不一定具備相關性。
(3)數學分析
通過數學分析,如數據樣本的差分、均值、方差等獲得數據樣本的特點,從數據中挖掘存在的價值信息,以對故障現象進行定位。相比于經驗知識,這種知識具有嚴謹的邏輯推理,從原理上分析故障產生機理,準確指導故障解決方案的制定。
通過上述方法獲取的專家知識表示如表1所示,之后按一定的規則存入知識庫。傳統方法獲取專家知識雖然方便、快捷,但還不能滿足測控設備自動化故障診斷的要求。隨著設備的使用時間推移,設備老化等問題造成故障發生部位、發生期產生變化,相應的專家知識也應隨之動態改變,因此需要研究深度挖掘、動態更新專家知識的方法,即數據挖掘方法。
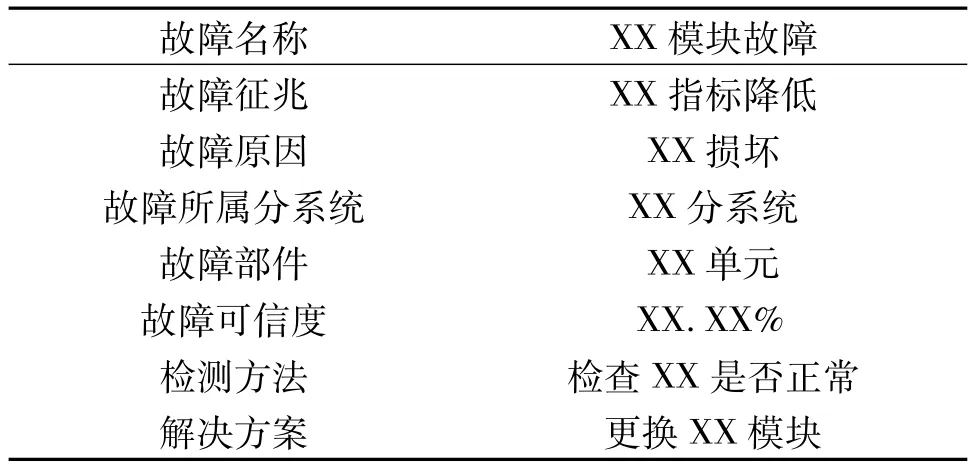
表1 故障診斷專家知識
3.2數據挖掘方法
數據挖掘方法主要通過領域專家或知識工程師利用某些手段,經過數據挖掘方法將知識存入專家知識庫,如圖3所示。一般專家知識數據挖掘方法主要有主分量提取、人工神經網絡、遺傳算法、粗集理論、信息融合、模糊邏輯等。下面重點討論前兩種方法。
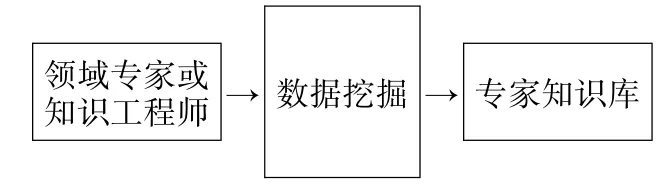
圖3 數據挖掘方法獲取專家知識
3.2.1主分量方法獲取
主成分分析法(Principal Component Analysis,PCA)的本質是對樣本數據的降維處理,將樣本空間數據投影到新的空間中[8],實際上是對樣本數據進行坐標變換,并不降低原始樣本數據的信息量,但卻可以有效分析樣本數據各指標的貢獻率,在故障診斷中該貢獻率越高,則該指標造成的故障可信度越高,診斷時應優先考慮。
主要算法如下所示:
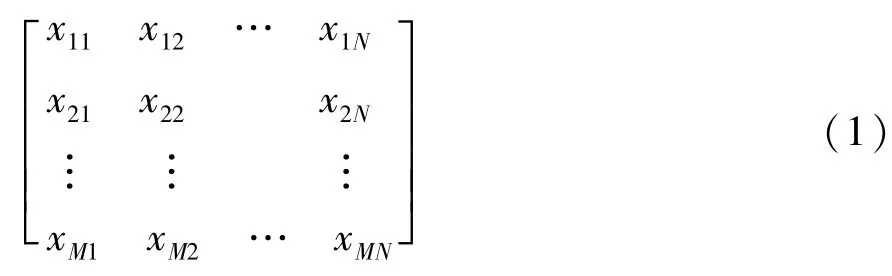
(1)以某一時刻為起點,取得一組長度為N的樣本指標X=[x1,x2,xi,...xn],隨后按固定頻率取同樣長度的一組指標,共取得M組樣本指標后構成M×N維樣本空間。
(2)樣本空間中同一指標的均值為:

協方差矩陣R=[rij]為:

(3)計算協方差矩陣的特征值λ1,λ2,...λj,...λN。
(4)對(3)求取的特征值按大小排序,計算各指標貢獻率Dj。
某一指標的貢獻率為:

式中貢獻率Dj值所占比重越大,則其對樣本空間的影響比越高,所含信息量也就較多。在故障診斷時,以貢獻率作為故障可信度進行參考分析,該比值越重,則說明該項影響造成設備故障的概率越高,可信度越高,故障排查時可優先排查是否是此項造成的設備問題。
設備信道某模塊有兩種狀態:正常,故障。兩種狀態各取2組監測值,每組取5個指標數據(溫度、雜波抑制度、信噪比、信號幅度、信號增益),得到4×5樣本矩陣。首先利用式(5)對數據樣本實現歸一化,得到無量綱樣本數據。

對歸一化得到的無量綱樣本數據進行主分量分析,得到特征值如表2所示。

表2 PCA得到的樣本特征值
表2中可看到第五個特征值的貢獻率最高,對應于信號增益,說明信號增益的影響對該模塊的影響最大,實際上也是信號增益對該模塊狀態影響最大,這與實際情況相對應,進而也驗證了主分量分析法應用于測控設備故障診斷專家知識的提取是可行的。
3.2.2基于BP神經網絡的知識獲取
神經網絡是源于人工智能神經元的思想,而BP神經網絡具備信息正向傳播和誤差反向傳播的特點[9],結構如圖4所示。學習過程是通過比較實際輸出值和期望輸出值之間的差值,當差值大于門限值,則通過原來的路徑返回,按照誤差調整原來路徑中神經元的權值和閾值。經過調整后,信息再次在路徑中正向傳輸,如此反復直至所有神經元節點誤差達到期望值,或訓練次數達到預定值則學習過程結束[10]。

圖4 神經網絡結構
對學習樣本S={X1,X2,...,Xn},各樣本節點權重W={W1,W2,...,Wm},對節點Xi,利用S函數計算實際輸出O1和誤差Err1,對權重修改得到W′={W′1,W′2,...,W′m}。以此方法對所有樣本節點進行循環求解,直到所有誤差達到目標值,滿足系統要求為止[11]。
選取數據樣本為信道艙某模塊的電壓指標值、電流值指標值、信噪比指標值、溫度指標值以及AGC指標值。
利用神經網絡模型對歸一化數據訓練,樣本數據為20×5矩陣,取前19×5的數據為訓練樣本,1×5數據矩陣作為測試矩陣。學習速率0.05,訓練次數5000,訓練目標1×10-3,隱含層神經元6個,輸出層神經元1個,隱層傳遞函數tansig,輸出層傳遞函數purelin,梯度下降學習函數traingdm,性能函數mse。通過仿真,得到訓練誤差曲線如圖5所示,測試矩陣真實值與預測值比較圖如圖6,其中得到訓練后的MSE誤差為0.099%,準確率接近100%。
圖6中可以看出,通過BP神經網絡仿真得到的數據值與樣本真實值基本一致,可見通過該方法獲得的值可以用來進行故障診斷專家知識的提前預知,并能以此為依據,提前發現設備可能出現的故障,有助于幫助設備人員在執行任務之前發現問題,排除設備隱患,為任務完成提供保障。
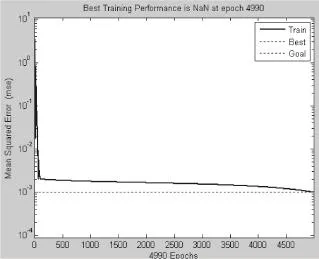
圖5 訓練誤差曲線圖

圖6 預測值與真實值比較圖
由BP神經網絡方法獲取的專家知識具有統一的內部表示形式,任何形式的知識都可以通過對范例的學習存儲在網絡的連接權值中,信息量大。而且BP神經網絡具有預測作用,通過對現有數據分析,運用網絡模型,對可能出現的情況進行推理,提前預知知識,拓展了專家系統獲取知識的方法。
4 結束語
通過對測控設備專家知識分類,研究獲取測控設備故障診斷專家知識的傳統方法和數據挖掘方法,著重分析基于主分量分析法和基于神經網絡的提取方法。對基于主分量分析法的研究可用于提取診斷主要特征量,獲取導致故障的主要因素。對基于神經網絡的專家知識提取方法進行分析,可在測控設備的長期使用中動態更新故障知識權重,依據設備性能更新專家知識。研究結果對基于測控設備的專家知識提取奠定了基礎,有助于提高故障診斷專家知識的提取效率,增強故障診斷專家系統的實用性。
[1]Lianxiang Jiang,Huawang Li,Genqing Yang,et al.Knowledge Acquisition Model for Satellite Fault Diagnosis Expert System[C].2009 International Conference on Computational Intelligence and Software Engineering,2009.
[2]陳瑋,胡光銳,汪亞平.飛行器故障診斷專家系統中的知識獲取機制[J].上海交通大學學報,2000,34(6):845-847.Chen Wei,Hu Guang-rui,Wang Ya-ping.Knowledge Acquisition in an Expert System for Fault Diagnosis of Certain Spacecraft[J].Journal of Shang Hai Jiao Tong University,2000,34(6):845-847.
[3]倪維斗,蔣東翔,于文虎.大型電站診斷系統中知識處理方法[J].清華大學學報(自然科學版),1996(7):36-40.Ni Wei-dou,Jiang Dong-xiang,Yu Wen-hu.Study on the methods of knowledge processing in an intelligent diagnostic system for large scale power plants[J].Journal of Tsinghua University(Sci&Tech),1996(7):36-40.
[4]馬紀明,萬蔚,曾聲奎.基于浴盆曲線故障率函數的FFOP預計方法[J].航空學報,2012,33(9):1664-1670.Ma Ji-ming,Wan Wei,Zeng Sheng-kui.FFOP Prediction on Method Based on Bathtub-Shaped Failure Rate Function[J].Acta Aeronautica et Astronautica Sinica,2012,33(9):1664-1670.
[5]張躍,李德英,黃文虎.飛船系統故障診斷的知識模型[J].系統工程理論與實踐,1996,16(9):51-57.Zhang Yue,Li De-ying,Huang Wen-Hu.Knowledge Model of Failure Diagnosis for Spacecraft System[J].Journal of Systems Science and Information,1996,16(9):51-57.
[6]徐江濤.航天器故障專家知識模型的建立方法研究[J].西安工業大學學報,2013(5):363-367. XU Jiang-tao.A Method for Establishing A Spacecraft Fault Diagnosis Expert Knowledge Model[J].Journal of Xi'an Technological University,2013(5):363-367.
[7]黃考利,連光耀,楊葉舟,等.裝備故障診斷專家系統知識獲取方法[J].計算機工程,2004,30(23):162-164.Huang Kao-li,Lian Guang-yao,Yang Ye-zhou,et al.Method of Knowledge Acquisition in the Fault Diagnosis Expert System of Equipment[J].Computer Engineering,2004,30(23):162-164.
[8]柴敏,楊悅,徐小輝,等.面向故障診斷的航天器遙測數據降維分析技術[J].彈箭與制導學報,2014,34(1):150-153.Chai Ming,Yang Yue,Xu Xiao-Hui,et al.The Dimension Reduction Analysis of Spacecraft's Telemetry Data for Fault Diagnosis[J].Journal of Projectiles,Rockets,Missiles and Guidance,2014,34(1):150-153.
[9]Azcarraga A,Hsieh M,Shan-Ling Pan,et al.Knowledge acquisition and revision via neural networks[C].2004 IEEE International Joint Conference on Neural Networks,2004,2(2):1365-1370.
[10]陳果,宋蘭琪,陳立波.基于神經網絡規則提取的航空發動機磨損故障診斷知識獲取[J].航空動力學報,2008(12):2170-2176.Chen Guo,Song Lan-qi,Chen Li-bo.Knowledge acquisition for aero-engine wear fault diagnosis based on rule extraction from neural networks[J].Journal of Aerospace Power,2008(12):2170-2176.
[11]Li-Min Su,Hong Zhang,Chao-Zhen Hou,et al.Research on an improved genetic algorithm based knowledge acquisition[C].2002 International Conference on Machine Learning and Cybernetics,2002(1):455- 458.
Research on Knowledge Acquisition Method of Fault Diagnosis Expert System for Measurement and Control Equipment
Zou Lei,Wang Xiaoqiang,Li Junyao,Wang Jun,Zang Quanjie
(Xi'an Satellite Measurement and Control Center,Weinan 714000,China)
In the task of high density satellite tracking,the dependence degree from human's involvement and control decreases with the higher automation degree of measurement and control equipment,but requirements of the equipment fault diagnosis and location accuracy and efficiency increase accordingly.In order to improve the degree of automation and reduce the time of the equipment downtime and maintenance,it is necessary to strengthen fault diagnosis level of the measurement and control equipment and enhance the automatic diagnosis ability of equipment fault diagnosis expert system.In the system,expert knowledge base affects the degree of diagnosis and knowledge acquisition is the bottleneck of the base.The acquisition method for the expert knowledge is researched to enrich knowledge base of expert system,improve the fault rapid positioning diagnosis ability,achieve downsizing effect,promote the smooth implementation of the satellite TT&C missions and improve the level of equipment automation effectively.
High-density;Measurement and control;Automation;Fault diagnosis;Expert knowledge base;Knowledge acquisition
10.3969/j.issn.1002-2279.2016.05.022
TP277
A
1002-2279(2016)05-0092-05
鄒磊(1987-),男,陜西省漢中市人,工程師。主研方向:航天測控。
2016-01-28
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:26:08
汽車維護與修理(2016年10期)2016-07-10 08:17:41
工業設計(2016年12期)2016-04-16 02:52:00
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39
消費者報道(2014年7期)2014-07-31 11:23:57
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
