深槽式凸極轉子無刷雙饋電機的動態特性研究
2016-11-28 05:39:35薛冰
微特電機 2016年6期
薛 冰
(國家知識產權局 專利局專利審查協作江蘇中心,蘇州 215163)
?
深槽式凸極轉子無刷雙饋電機的動態特性研究
薛 冰
(國家知識產權局 專利局專利審查協作江蘇中心,蘇州 215163)
通過深槽加工優化改進傳統的普通凸極轉子結構,得到了深槽式凸極轉子無刷雙饋電機。對普通凸極轉子和深槽式凸極轉子無刷雙饋電機的動態特性進行了仿真,得到了從單饋異步運行方式牽入到同步、亞同步和超同步運行方式的過渡過程以及從空載到負載運行的轉速和轉矩波形。經過優化前后對比分析,驗證了深槽式凸極轉子無刷雙饋電機設計的合理性。
無刷雙饋電機;深槽式凸極轉子;動態特性
0 引 言
無刷雙饋電機(以下簡稱BDFM)是一種結構特殊的電機,近些年許多學者對其進行了深入研究,由于其具有優良的機械特性和簡單的結構特點等優勢,在許多領域都有很好的實際生產應用潛力。但常見的BDFM轉子磁場調制能力不高,使得BDFM運行效果不好[1]。因而,對常見的BDFM轉子結構優化設計,提高其動態特性以及運行效率顯得尤為重要。
常見的凸極轉子磁場調制效果差,導致其動態運行能力弱,影響電機效率和性能。通過參考磁障式磁阻轉子的結構特點,通過加工深槽優化改進傳統的普通凸極轉子結構,可得到深槽式凸極轉子無刷雙饋電機。后又在深槽中嵌入導條以達到進一步優化其磁場調制能力和動態特性的目的,最后通過Ansoft有限元仿真軟件對凸極轉子、深槽式凸極轉子和深槽加導條式凸極轉子BDFM的3種過渡過程的牽入特性,以及從空載到負載運行的穩定性進行了仿真,比較優化改進前后轉子的動態特性能力。
本文通過對普通凸極轉子和深槽式凸極轉子無刷雙饋電機的動態特性進行了仿真,得到了從單饋異步運行方式牽入到同步、亞同步和超同步運行方式的過渡過程以及從空載到負載運行的轉速和轉矩波形。經過對比分析,驗證了深槽式凸極轉子無刷雙饋電機設計的合理性。
1 無刷雙饋電機的結構原理
如圖1所示,BDFM結構為一個放置有兩組極數各異互為冗余的三相繞組的定子和一個轉子,互為冗余的三相繞組分別為與變頻電源連接的控制繞組以及與工頻電源連接的功率繞組[2]。

圖1 無刷雙饋電機的結構
當功率和控制繞組極對數一定時,BDFM轉速控制可通過調節控制繞組的頻率來實現,其轉速表達式:
(1)
式中:fp代表功率側頻率;fc代表控制側頻率;pp代表功率側極對數;pc代表控制側極對數;“-”代表控制側與功率側的基波磁勢反向; “+”表示功率繞組與控制繞組的基波磁勢同向。
2 深槽式凸極轉子結構設計
依據BDFM的基本結構和原理可知,定子兩套繞組之間耦合能力取決于特殊的轉子結構,耦合能力的好壞也直接決定電機效率的高低和性能的優劣。普通凸極轉子結構的凸極間磁阻效應不強,隔磁效果不理想,磁通在上面的流通方向不規則,具有很大的不確定性,所以此結構轉子磁耦合能力弱,動態特性差。
本文把通過參考磁障式磁阻轉子的結構特點,通過加工深槽優化改進傳統的普通凸極轉子結構,得到了深槽式凸極轉子無刷雙饋電機,深槽為高磁阻率材料,在凸極表面加工pr個深槽,通過高磁阻深槽式凸極轉子結構如圖2所示。

圖2 深槽式凸極轉子結構
為了進一步提高深槽式凸極轉子限制諧波磁通路徑的能力,增高其磁場極數自動轉換效率與動態特性,參考環狀籠型轉子的設計靈感,在深槽內加短路導條,當無效諧波磁場通過短路導條時,會形成感應電流生成逆向磁通阻擋有害諧波磁通,更有效的加強了轉子磁耦合效果。不過嵌入的短路導條因有電流通過會發熱耗能,以及加工復雜度與成本也相對較高。
3 深槽式凸極轉子無刷雙饋電機的動態特性研究
改變控制繞組的饋電方式,可以使BDFM工作在同步、亞同步、超同步3種運行狀態。在實際應用中,無論需要它工作在哪種狀態,都需要從自起動與異步運行方式過渡到上述3種狀態,即從單饋異步運行方式牽入到同步運行方式、從單饋異步運行方式牽入到亞同步運行方式和從單饋異步運行方式牽入到超同步運行方式,其牽入能力的好壞對BDFM能否穩定快速過渡到不同運行狀態影響很大,因此本文就對普通凸極轉子、深槽式凸極轉子和深槽加導條式凸極轉子BDFM的3種過渡過程的牽入特性以及從空載到負載運行的穩定性進行了仿真對比研究。
首先對同步運行動態特性進行仿真研究。利用Ansoft軟件自帶的MaxwellCircuitEditor外電路編輯器建立勵磁電源并一鍵導入Maxwell2D進行動態特性仿真計算。其中求解時間為2.5s,求解步長為0.002s,功率繞組接380V、50Hz正弦交流電源, 0~1s將控制繞組短路,進行空載異步啟動,1s時給控制繞組接20V直流電源,從單饋異步運行方式牽入到同步運行方式,在1.9s時加40N·m負載,進行負載同步運行。
由圖3~圖5可知,3種轉子BDFM都具備單饋異步自啟動能力,啟動特性與常規交流電機相類似,其中普通凸極轉子空載啟動時間大約是0.9s,深槽式凸極轉子大約是0.6s,深槽加導條式凸極轉子啟動轉矩最大,啟動時間最短,大約是0.23s,啟動結束后,進入單饋異步運行狀態,由于沒加負載,轉差率很小,轉速基本穩定運行在750r/min。在1s給控制繞組接直流電,此時3種轉子的轉速和轉矩都有一定的波動,其中普通凸極轉子BDFM轉速和轉矩波動幅度最大,在1.5s左右轉速被平穩的牽入到同步轉速750r/min,深槽式凸極轉子BDFM轉速轉矩波動幅度較普通凸極轉子小,在1.32s左右轉速被平穩的牽入到同步轉速750r/min,深槽加導條式凸極轉子BDFM轉速轉矩波動幅度最小,在1.27s左右就能很快牽入到同步轉速750r/min穩定運行。在1.9s時加40N·m負載,除了普通凸極轉子BDFM轉速和轉矩波動稍微大一些,重新恢復到同步轉速的時間稍長些,深槽式凸極轉子和深槽加導條式凸極轉子BDFM轉速和轉矩的波動都很小,能很快的恢復穩態,轉速維持750r/min不變,轉矩被牽到40N·m,其同步運行特性和電勵磁同步電機相類似。可以看出,在異步啟動上,普通凸極轉子BDFM啟動轉矩最小,啟動時間最長,深槽式凸極轉子BDFM次之,深槽加導式凸極轉子BDFM啟動轉矩最大,啟動時間最短;從單饋異步牽入到同步運行方式,深槽加導式凸極轉子BDFM動態響應能力最好,深槽式凸極轉子BDFM次之,普通凸極轉子BDFM最差;機械負載變化穩定性方面,深槽式凸極轉子和深槽加導條式凸極轉子BDFM都較理想,而普通凸極轉子較之差一些。

(a)轉速曲線(b)轉矩曲線
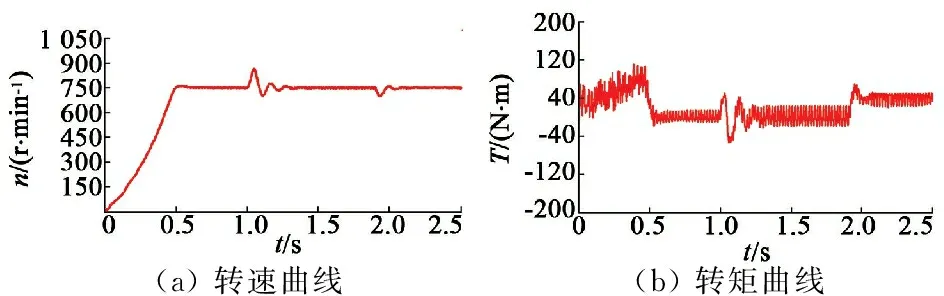
圖3 凸極轉子同步運行

圖4 深槽式凸極轉子同步運行
圖5 深槽加導條凸極轉子同步運行
可見,普通凸極轉子通過改進加深槽后,在異步啟動和同步運行動態特性上都有了一定的提高,總體上而言,3種轉子BDFM的同步運行特性很理想,另外,3種轉子在同步運行狀態下的轉速大小與式(1)的計算結果相一致,即也說明了上述3種轉子同步運行動態特性的仿真結果都是正確的。
下面對亞同步運行動態特性進行仿真,其中深槽式凸極轉子和深槽加導條式凸極轉子求解時間為2.5 s,求解步長為0.002 s,功率繞組接380 V、50 Hz正弦交流電源,0~1 s將控制繞組短路,進行空載異步啟動,1 s時給控制繞組接60 V、10 Hz反向序交流電源,從單饋異步運行牽入到亞同步運行方式,在1.9 s時加40 N·m負載,進行負載亞同步運行;普通凸極轉子除了求解時間為3 s,在2.2 s時加40 N·m負載,進行負載亞同步運行外,其余求解條件不變。
由圖6~圖8可知,3種轉子啟動過程和同步運行時一樣,最后穩定運行在750 r/min的空載轉速上。在1 s時給控制繞組接60 V、10 Hz反向序交流電源,此時3種轉子的轉速和轉矩都有不同程度的波動,其中普通凸極轉子BDFM轉速和轉矩波動幅度最大,在1.95 s左右轉速被順利牽入到600 r/min,深槽式凸極轉子BDFM轉速轉矩波動幅度較普通凸極轉子小,在1.65 s左右轉速被順利的牽入到600 r/min,深槽加導條式凸極轉子BDFM轉速轉矩波動幅度最小,在1.5 s左右就能很快的順利牽入到轉速600 r/min。深槽式凸極轉子和深槽加導條式凸極轉子在1.9 s時加40 N·m負載,而普通凸極轉子在2.2 s時加40 N·m負載,3種轉子的轉速和轉矩波動幅值差不多大,其中普通凸極轉子BDFM經過0.6 s調整后在2.8 s左右重新恢復到轉速600 r/min,深槽式凸極轉子BDFM經過0.45 s調整后在2.35 s左右重新恢復到轉速600 r/min,深槽加導條式凸極轉子BDFM經過0.4 s調整后大約在2.3 s重新恢復到轉速600 r/min,轉矩都被牽到40 N·m,在帶載的情況下,依然維持轉速不變,體現了較硬的機械特性。可以看出,從單饋異步牽入到亞同步運行方式,深槽加導式凸極轉子BDFM動態響應能力最好,深槽式凸極轉子BDFM次之,普通凸極轉子BDFM最差;機械負載變化穩定性方面,3種轉子波動幅度差不多,只是普通凸極轉子較另兩個轉子調整恢復到轉速600 r/min的時間較長些。

(a)轉速曲線(b)轉矩曲線

圖6 凸極轉子亞同步運行

圖7 深槽式凸極轉子亞同步運行
圖8 深槽加導條凸極轉子亞同步運行
和同步運行動態特性一樣,普通凸極轉子通過改進加深槽后,在亞同步運行動態特性上也有了一定的提高,總體上而言,3種轉子BDFM的亞同步運行特性較理想,但穩定后的轉速平滑程度上較同步運行差些,另外,3種轉子在亞同步運行狀態下的轉速大小與式(1)的轉速公式計算結果相一致,即也說明了上述3種轉子亞同步運行動態特性的仿真結果都是正確的。
最后對超同步運行動態特性進行仿真。其中求解時間為2.5 s,求解步長為0.002 s,功率繞組接380 V、50 Hz正弦交流電源, 0~1 s將控制繞組短路,進行空載異步啟動,1 s時給控制繞組接60 V、10 Hz正向序交流電源,從單饋異步運行方式牽入到超同步運行方式,在1.9 s時加40 N·m負載,進行負載超同步運行。
由圖9~圖11可知,3種轉子異步啟動后都穩定運行在750 r/min的空載轉速上,在1 s時給控制繞組接60 V、10 Hz正向序交流電源,此時可以看出,普通凸極轉子BDFM轉速和轉矩波動幅度很大,并且持續震蕩,不能趨于穩定,深槽式凸極轉子BDFM轉速轉矩波動幅度較小,經過大約0.6 s后,在1.6 s左右轉速被順利的牽入到轉速900 r/min,深槽加導條式凸極轉子BDFM,經過大約0.55 s調整后,在1.55 s左右被順利牽入到轉速900 r/min。在1.9 s時加40 N·m負載,普通凸極轉子BDFM轉速和轉矩依然持續震蕩,不能趨于穩定,深槽式凸極轉子BDFM在2.4 s左右重新恢復到轉速900 r/min,深槽加導條式凸極轉子BDFM大約在2.3 s重新恢復到轉速900 r/min,兩者轉矩都被牽到40 N·m,在超同步運行方式下,這兩個轉子在帶載的情況下,依然維持轉速不變,體現了較硬的機械特性。

(a)轉速曲線(b)轉矩曲線
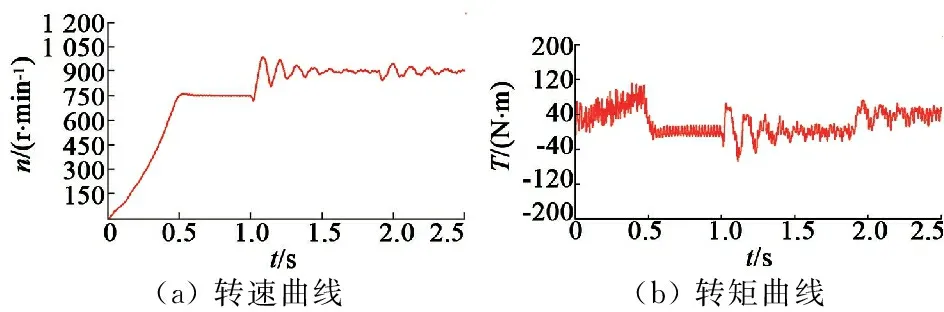
圖9 凸極轉子超同步運行

圖10 深槽式凸極轉子超同步運行
圖11 深槽加導條凸極轉子超同步運行
BDFM在運行時,在控制繞組上所通入的電壓有一個穩定的范圍,稱作BDFM的穩定運行范圍[3],上述普通凸極轉子BDFM的轉速和轉矩不能穩定收斂的原因是控制繞組通入的60 V、10 Hz正向序交流電超出了其穩定運行范圍,而通過對普通凸極轉子進行改進加深槽后,使原來不在穩定運行范圍的控制電壓進入到穩定運行范圍內,即改進后的深槽式凸極轉子BDFM的電壓穩定運行范圍更大。另外,控制側電壓設定60 V、頻率設定10 Hz時,凸極轉子可以在亞同步狀態下穩定運行,而在超同步狀態下轉矩和轉速持續波動不能收斂,不能穩定運行,即上述仿真結果也順應了文獻[4]所得的結論:無刷雙饋電機運行在亞同步狀態具有寬的控制電壓穩定范圍,運行在超同步狀態具有窄的控制電壓穩定范圍。
下面把求解條件中求解時間改為2.7 s,在1 s時給控制繞組改成通入70 V、10 Hz正向序交流電源,從單饋異步運行方式牽入到超同步運行方式,其余求解條件不變,重新對普通凸極轉子BDFM超同步運行動態特性進行仿真,得到的70 V、10 Hz普通凸極轉子BDFM超同步運行動態特性如圖12所示。

(a)轉速曲線(b)轉矩曲線
圖12 凸極轉子超同步運行2
從圖12得知,在1 s時給控制繞組改接70 V、10 Hz正向序交流電源后,普通凸極轉子BDFM轉速和轉矩可以順利的收斂,并在1.7 s左右牽入到轉速900 r/min,在1.9 s時加40 N·m負載,其轉速和轉矩經過0.7 s調整,在2.6 s左右轉速重新恢復到900 r/min,轉矩則被牽入到40 N·m,可見控制繞組通入70 V、10 Hz正向序交流電在普通凸極轉子BDFM超同步運行狀態下的穩定區間內。
由以上分析可知,無論從單饋異步牽入到超同步運行方式還是機械負載變化穩定性方面,深槽加導式凸極轉子BDFM動態響應能力最好,深槽式凸極轉子BDFM次之,普通凸極轉子BDFM最差。通過對普通凸極轉子進行改進加深槽后,其超同步運行動態特性變好了,穩定運行區間也變大了,另外,3種轉子在超同步運行狀態下的轉速大小與式(1)的轉速公式計算結果相一致,即也說明了上述3種轉子超同步運行動態特性的仿真結果都是正確的。
4 結 語
(1) 3種轉子都具備單饋異步自啟動能力,深槽加導條式凸極轉子啟動能力最好,深槽式凸極轉子次之,普通凸極轉子最差。
(2) 無論是從單饋異步牽入到同步運行方式、到亞同步運行方式還是到超同步運行方式,深槽加導式凸極轉子BDFM動態響應能力最好,深槽式凸極轉子BDFM次之,普通凸極轉子BDFM最差。
(3) 同步、亞同步和超同步運行方式下機械負載變化后的穩定性方面,深槽式凸極轉子和深槽加導條式凸極轉子BDFM都較理想,而普通凸極轉子較之差一些。
(4) 深槽式凸極轉子BDFM的電壓穩定運行范圍比普通凸極轉子BDFM大。
(5) 3種轉子工作在同步、亞同步和超同步運行狀態下,轉速和負載大小無關,機械特性較硬。
(6) 3種轉子BDFM的同步運行動態特性最好。
(7) 無刷雙饋電機運行在亞同步狀態具有寬的控制電壓穩定范圍,運行在超同步狀態具有窄的控制電壓穩定范圍。
[1] 龔晟,楊向宇,王芳媛.無刷雙饋電機起源、發展及原理綜述[J].微電機,2010,43(8):79-82.
[2] 王鳳翔,張鳳閣.磁場調制式無刷雙饋交流電機[M].長春:吉林大學出版社,2004.
[3] 鄧先明.無刷雙饋電機的電磁分析與設計應用[M].北京:機械工業出版社,2009.
[4] 鄧先明,姜建國,伍小杰,等.籠型轉子無刷雙饋電機的無功功率和穩定性[J].電工技術學報,2008,23(1):40-47.
Research on Dynamic Characteristic of BDFM with Deep Slot Salient Pole Rotor
XUEBing
(Patent Examination Cooperation Jiangsu Center of the Patent Office, SIPO, Suzhou 215163, China)
Through adding deep slots on the ordinary salient pole rotor, a brushless doubly-fed machine (BDFM) with deep slot salient pole rotor was got. The dynamic characteristics of BDFM with ordinary salient pole rotor and deep slot salient pole rotor were simulated to get the speed and torque waveforms of transition process from single-fed asynchronous operation mode pull into synchronous, sub-synchronous and super-synchronous operation mode as well as from no-load to the load. The results verify the rationality of the design of salient pole rotor with deep slots.
brushless double-fed machine (BDFM); salient pole rotor with deep slots; dynamic characteristics
2014-12-06
TM34
A
1004-7018(2016)06-0027-04
薛冰(1988-),男,碩士,從事電學專利審查工作。