高沖擊三維加速度傳感器橫向靈敏度校準技術
2016-11-23 08:14:28張振海李科杰
振動、測試與診斷 2016年5期
關鍵詞:方向
林 然, 張振海, 李科杰, 何 昫, 張 亮
(北京理工大學機電學院 北京,100081)
?
高沖擊三維加速度傳感器橫向靈敏度校準技術
林 然, 張振海, 李科杰, 何 昫, 張 亮
(北京理工大學機電學院 北京,100081)
探討了高沖擊三維加速度傳感器相對橫向靈敏度的校準技術。新制定的國標已規(guī)范化了傳感器的相對橫向靈敏度這一參數,它是加速度傳感器的一個重要指標,但其定義僅對一維加速度傳感器而言。為了擴展到高沖擊三維加速度傳感器相對橫向靈敏度的校準上,筆者采用在空氣炮上實現(xiàn)高沖擊三維加速度傳感器的校準方法采集數據,以三維加速度傳感器的擬合直線代替校準曲線、用側向芯片和主向芯片輸出之比計算相對橫向靈敏度,更便于使用者評價傳感器的性能。完善了高沖擊三維加速度傳感器相對橫向靈敏度測試和校準的技術。相比其他技術,采用的校準裝置和校準方法既符合傳感器峰值高、脈寬大的特點,又能完整地呈現(xiàn)三軸向間的輸出關系。
三維加速度傳感器; 相對橫向靈敏度; 高沖擊; 空氣炮; 校準
引 言
根據最新的標準,GB/T 20485.31-2011/ ISO 16063-31[1]規(guī)范化了加速度傳感器相對橫向靈敏度這一參數,它代替了原標準中橫向靈敏度比的概念,它是加速度傳感器的一個重要指標,它表征傳感器在主向工作時,其橫向效應的大小。高沖擊三維加速度傳感器的橫向效應一直是研究者高度關注的問題。同原標準中關于橫向靈敏度比的定義,根據GB/T 20485.31-2011[1],ISO16063-1[2],ISO5347-12[3],GJB5439-2005[4],加速度傳感器相對橫向靈敏度是橫向靈敏度和主向靈敏度之比,定義主要是對于一維加速度傳感器而言,現(xiàn)在討論如何擴展到高沖擊三維加速度傳感器的相對橫向靈敏度計算方法。
筆者所采用的空氣炮校準裝置,遠遠超出國標中推薦的裝置測量范圍0~1 000 m/s2(約100g),其峰值能夠達到2×105g,脈寬超過100 μs;國標中推薦的是振動激勵的方法,而筆者采用的是一次性沖擊、碰撞激勵的方法;更重要的是,這項技術一次性解決了三軸都能在高g值的滿量程范圍內的校準,通過解算三軸的相對橫向靈敏度反應出軸向間的大小關系,為使用者了解傳感器性能提供有效參數。文中同時體現(xiàn)高峰值和傳感器三維的性能,在計算相對橫向靈敏度的過程中,也解算出了主向沖擊靈敏度、橫向靈敏度及線性度。
電子測試技術實驗室[5],中北大學[6]等單位對于加速度傳感器的相對橫向靈敏度的測試方法進行了研究。國內外研究,多見對于一維加速度傳感器的相對橫向靈敏度進行了測試,而對于高沖擊的三維加速度傳感器,尚未發(fā)現(xiàn)同時展現(xiàn)高沖擊和三維(特別是橫向)的特性。
中北大學、中科院上海微系統(tǒng)所研究的共同的特點是只研究了傳感器主向[7],對非主軸校準的峰值較低[8]。他們通過擬合直線的斜率作為主向靈敏度、并計算端基線性度,或者僅僅計算平均靈敏度[9],都沒有給出相對橫向靈敏度的方法;他們將各個測點的橫向電壓和主向加速度之比作為橫向靈敏度,取一組中的最大值為最大橫向靈敏度,橫向靈敏度和主向靈敏度之比為橫向靈敏度比,其實質是橫向電壓和主向電壓之比。用橫向輸出電壓和主向輸出電壓之比計算相對橫向靈敏度,實質上是校準曲線的斜率之比,校準曲線上各實測點是在線性度范圍內偏離擬合直線,各個點的斜率都不同,這會給使用者帶來不便。筆者以三軸擬合直線斜率代替校準曲線的斜率,斜率之比就是橫向靈敏度和幾何軸向靈敏度之比,校準結果只要這一個參數就可以讓使用者了解傳感器橫向效應的大小。中北大學使用馬歇特錘[10],中科院上海微系統(tǒng)所[11]使用自由落桿裝置,三向的數據都沒有超過5×105g。
另外,根據一維加速度傳感器的相對橫向靈敏度的模型,探索適合于高沖擊三維加速度傳感器的相對橫向靈敏度的測試方法。GB/T 20485.31-2011/ISO 16063-31[1]采用三軸激振臺等校準方法,不適合于高沖擊三維加速度傳感器相對橫向靈敏度測試。因為振動臺不能為加速度傳感器提供峰值高、脈沖寬的激勵,并且校準裝置的結構也不能采用該標準中推薦的八面體,只能在少數和特定的橫向靈敏度方位角對傳感器進行測試,從而合成出橫向靈敏度,再計算相對橫向靈敏度。
被測試的對象是高沖擊三維加速度傳感器。高沖擊三維加速度傳感器有4種結構:中北大學[10]和中科院上海微系統(tǒng)所[12]研制了單片集成的結構;北京理工大學研制的3個芯片正交安裝的組合式結構和三維敏感芯片[13],實質上前二者是3個獨立的敏感單元;第3種僅有三個相同敏感單元、三軸正交安裝;最后一種通過電橋合理布設在芯片上來解算三維加速度。但是4種結構的敏感方向都是相互正交的,完全校準三軸向的主向沖擊靈敏度、橫向靈敏度以及相對橫向靈敏度須有適合的校準轉接裝置。
1 校準轉接裝置
空氣炮是峰值達到20×105g的傳感器標定裝置,并且脈寬大于100 μs。空氣炮用于標定高沖擊三維加速度傳感器的主向沖擊靈敏度和橫向靈敏度、線性度。空氣炮是長管形狀,中部是碰撞激勵體系,前側和尾端回收系統(tǒng)在此處為分開的兩段,傳感器要通過校準轉接裝置在試驗前固定于空氣炮上,試驗中傳感器受到激勵加速度,自由飛行進入尾端的回收系統(tǒng),數采裝置采集傳感器的輸出電壓。
校準轉接裝置也被稱為砧體,其錐面和空氣炮安裝板壓緊,空氣炮驅動彈丸和砧體相碰,砧體自由飛行進入回收裝置,并且應力波通過砧體再傳遞到傳感器殼體。砧體的作用是保護傳感器和傳遞應力的作用,砧體上粘結的反射膜將激光信號反射,激光多普勒測速裝置感應出砧體的速度,進而由軟件計算加速度。砧體是一個圓柱體,軸線方向就是校準的沖擊方向,圖1中3向砧體的特點是在沖擊校準時,沖擊方向是被校主芯片的敏感方向,即被校主芯片的外法線方向和沖擊方向一致。傳感器的3個敏感方向都能作為主向分別在3向砧體上進行測試。

圖1 校準轉接裝置Fig.1 Calibration transfer devices
2 靈敏度
高沖擊三維加速度傳感器有3個主向沖擊靈敏度,分別是Sxx,Syy,Szz。由于被測傳感器是3個敏感芯片獨立的形式,垂直于沖擊方向安裝或布設的芯片,其應力應變都大于其余兩塊芯片,所以其輸出也是最大,在該沖擊方向是主向芯片,主向芯片的靈敏度是主向沖擊靈敏度。
根據國標的定義,靈敏度是輸出變化量和輸入變化量之比。傳感器在第i個測點處的靈敏度為
(1)
即傳感器工作特性曲線的斜率,根據每個沖擊方向取4個點(包含零點),獲取傳感器的主向芯片的輸出,并計算出主向沖擊靈敏度。
圖2~圖4為3向沖擊下傳感器的3芯片輸出曲線。
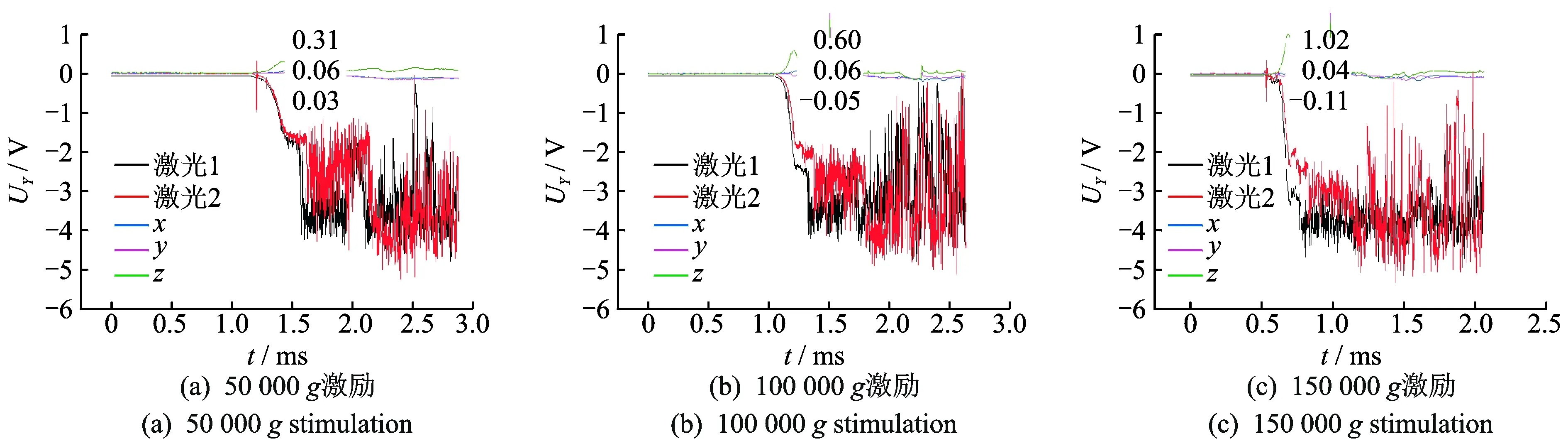
圖2 z向沖擊時傳感器輸出Fig.2 Output of accelerometer when calibrated in z-direction
圖3 x向沖擊時傳感器輸出Fig.3 Output of accelerometer when calibrated in x-direction
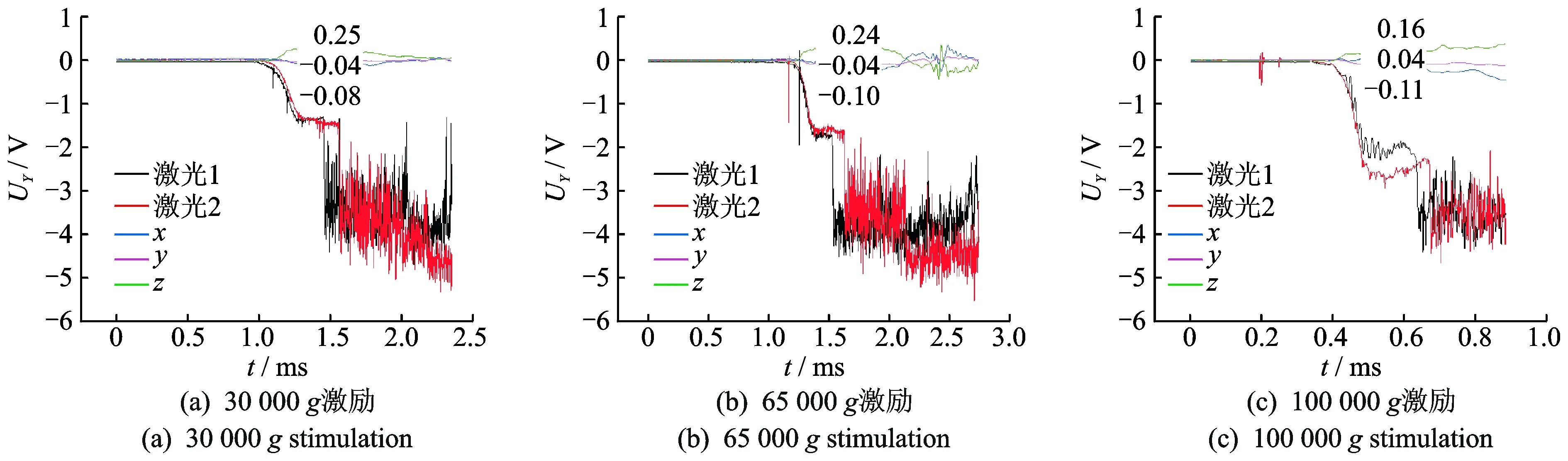
圖4 y向沖擊時傳感器輸出Fig.4 Output of accelerometer when calibrated in y-direction
表1列出了同峰值時刻的三向輸出峰值讀數。用最小二乘法按照各激勵和輸出峰值的關系擬合直線。在每一個沖擊方向下,除了主向芯片的特性曲線外,還根據側向芯片的數據擬合出兩條橫向特性曲線,曲線的斜率就是兩軸向的橫向靈敏度。
在工程領域中最小二乘法使用較為廣泛,其原理是使數據和擬合函數的加權殘差平方和最小,假設擬合直線
(2)

圖5(a~c)分別描繪了在z向沖擊,x向沖擊,y向沖擊的情況下,用最小二乘法擬合出的三維加速度傳感器的3個軸向的輸入輸出特性曲線。橫坐標為表1中的激勵加速度,縱坐標為與該加速度對應的行中的輸出峰值電壓/放大倍數。
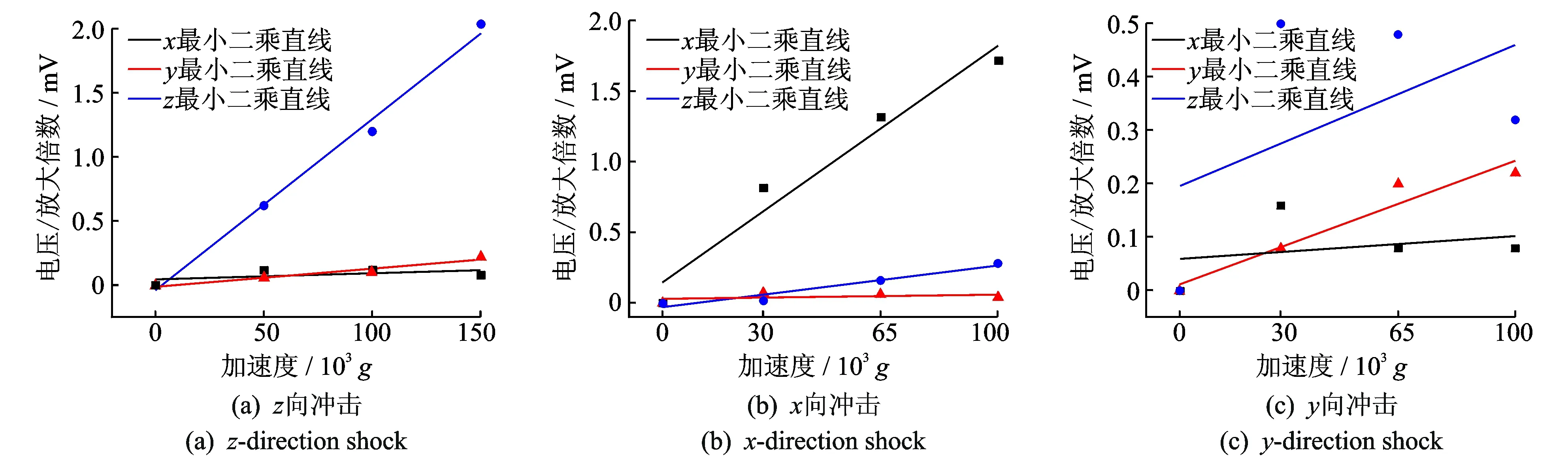
圖5 擬合直線Fig.5 Fitting straight line
表1 高沖擊三維加速度傳感器測試結果
Tab.1 Testing results of high shock tri-axis accelerometer
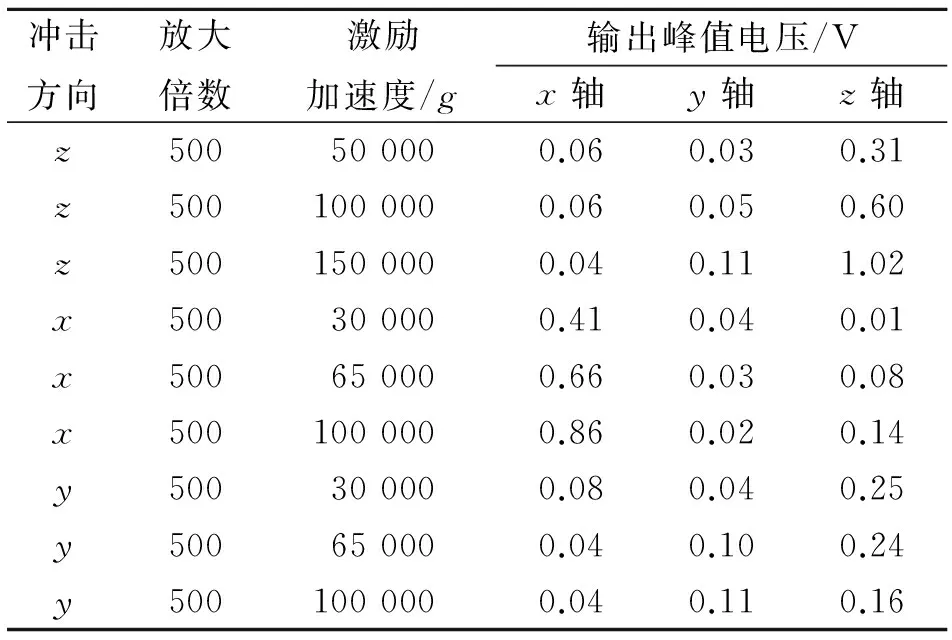
沖擊方向放大倍數激勵加速度/g輸出峰值電壓/Vx軸y軸z軸z500500000.060.030.31z5001000000.060.050.60z5001500000.040.111.02x500300000.410.040.01x500650000.660.030.08x5001000000.860.020.14y500300000.080.040.25y500650000.040.100.24y5001000000.040.110.16
在表2的第3行中的數字為圖5(a)中三維加速度傳感器的3個軸向的輸入輸出特性曲線的斜率,3個斜率分別為z軸主向沖擊靈敏度和兩個橫向靈敏度。同樣,在表2的第1行中的數字為圖5(b)中三維傳感器x軸、y軸和z軸的輸入輸出特性曲線的斜率,分別是x軸主向沖擊靈敏度和兩個橫向靈敏度。在表2的第2行中的數字為圖5(c)中的三維傳感器的三軸向輸入輸出特性曲線的斜率,分別是y軸主向沖擊靈敏度和兩個橫向靈敏度。
表2 最小二乘法計算靈敏度
Tab.2 Sensitivity computed by Least square method
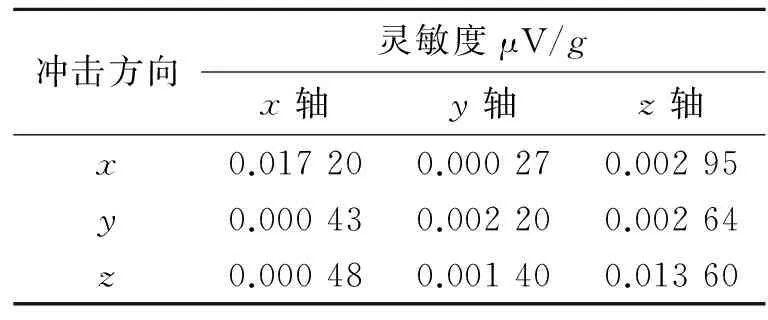
沖擊方向靈敏度μV/gx軸y軸z軸x0.017200.000270.00295y0.000430.002200.00264z0.000480.001400.01360
3 相對橫向靈敏度
一維加速度傳感器的相對橫向靈敏度是8字形曲線,傳感器相對橫向靈敏度大小取決于傳感器的安裝角度,振動頻率越高八字形最大半徑越小,相對橫向靈敏度的測試方法可以采用離心機[5],簧片梁[14],振動臺[15]和分度臺[16]等。根據GB/T 20485.31-2011[1]中的振動校準方法,8面體裝置將傳感器安裝為0~360°之間的8個角度,但是振動試驗只能激勵出較低的g值[17],而高沖擊三維加速度傳感器,要在最高量程范圍內對傳感器進行測試,獲得越高g值,沖擊能量也越大,沖擊次數較多將使傳感器受疲勞而失效,這樣限制了試驗次數;并且要試驗達到高g值,校準裝置不宜采用質量重、體積大的砧體,所以高沖擊三維加速度傳感器一般僅在單一的橫向靈敏度角下試驗,完整的相對橫向靈敏度的模型還沒有能建立。
(3)
三維加速度傳感器實質上有3個一維加速度傳感器構成,3個一維加速度傳感器的敏感方向相互正交,使用者希望主向沖擊靈敏度盡量大,而橫向靈敏度盡可能小。相對橫向靈敏度正是反映這一關系的參數。能否按照一維加速度傳感器相對橫向靈敏度的定義來計算三維加速度傳感器呢?即某塊芯片作為橫向時的輸出和作為主向時的輸出之比。
表3中的結果,y向沖擊時,x芯片和z芯片相對橫向靈敏度都<20%,而實際的輸出情況是如圖4中,y軸信號大小比z軸小。所以若用一維的定義計算三
維,實質上只考核了某一塊芯片的性能,并不能反映在該向沖擊時,3個軸輸出之間的大小關系,而對于使用者而言,更關注的是傳感器整體性能,一般橫軸輸出的大小不要比主軸大。對于三維加速度傳感器,相對橫向靈敏度按側向芯片和主向芯片輸出大小之比計算更能考核傳感器整體的性能。
表3 高沖擊三維加速度傳感器3向芯片相對橫向靈敏度
Tab.3 Relative transverse sensitivity of three sensing chips of high shock tri-axis accelerometer
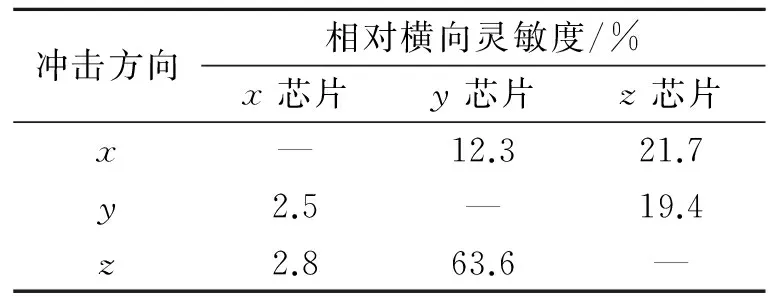
沖擊方向相對橫向靈敏度/%x芯片y芯片z芯片x—12.321.7y2.5—19.4z2.863.6—
圖6中標示出三維加速度傳感器的各主軸靈敏度和橫向靈敏度。S表示靈敏度,第1個下標為沖擊方向,第2個下標表示哪個軸傳感器輸出。Smax表示合成出的近似最大的靈敏度,ST,max為合成出的近似最大的平面橫向靈敏度,θ為主軸靈敏度與近似最大靈敏度的夾角。
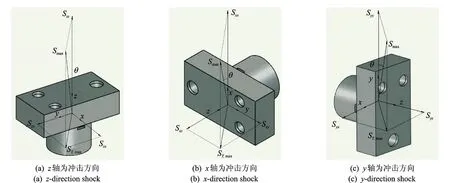
圖6 各沖擊方向的靈敏度Fig.6 General view of sensitivity when calibrated in three direction respectively
例如,z向沖擊時,相對橫向靈敏度
(4)
比較式(3)和式(4)可知,分子不同,輸出軸傳感器不同。另外有
(5)
即由擬合直線計算出的橫向輸出和主向輸出之比,但并不是各個校準點的實際輸出之比,因為實際輸出是在線性度范圍內偏離擬合直線的。
表4根據擬合直線計算,可見在y沖擊時,z軸的輸出是y軸的120%,即橫軸比主軸大。所以這一結果反映了三維加速度傳感器橫向效應的大小。
表4 高沖擊三維加速度傳感器相對橫向靈敏度
Tab.4 Relative transverse sensitivity of high shock tri-axis accelerometer
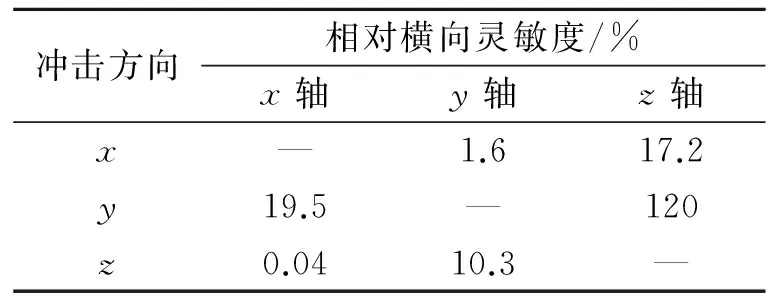
沖擊方向相對橫向靈敏度/%x軸y軸z軸x—1.617.2y19.5—120z0.0410.3—
由兩軸橫向靈敏度合成出近似最大的平面橫向靈敏度ST,max
(6)
(7)
表5根據上式分別計算出三向的相對橫向靈敏度,y向時最大。
表5 高沖擊三維加速度傳感器相對橫向靈敏度
Tab.5 Relative transverse sensitivity of high shock tri-axis accelerometer
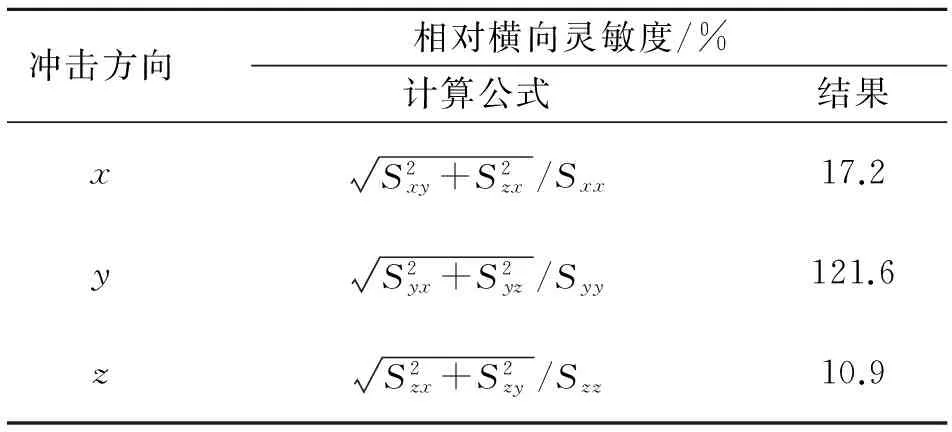
沖擊方向相對橫向靈敏度/%計算公式結果xS2xy+S2zx/Sxx17.2yS2yx+S2yz/Syy121.6zS2zx+S2zy/Szz10.9

4 試驗結果分析
x軸主向靈敏度要大于y軸主向靈敏度,y軸和x軸分別作為沖擊方向時,y軸的相對橫向靈敏度大很多。由圖4和圖5可以看出,y向沖擊時,y軸作為主軸,其輸出較小,比此時的橫軸z軸要小。根據表5,y向沖擊時,相對橫向靈敏度過大,也反映出了這一現(xiàn)象。
據判斷是由傳感器封裝、芯片的非對稱性和安裝方式帶來的。由于芯片是膜片式的,所以其發(fā)生的扭曲和彎矩很小,主因判斷來自于傳感器封裝的結構,被測試傳感器封裝為立方體,下部分圓柱形螺柱連接安裝面,y軸為長度方向,x軸為寬度方向,受沖擊時,應力波從螺柱傳遞到敏感單元。如圖7所示,在x軸或y軸作為沖擊方向時,最大應力或應變都集中在螺柱根部,x軸芯片距離螺柱約束面最近,所以形變導致的輸出變化也最大。
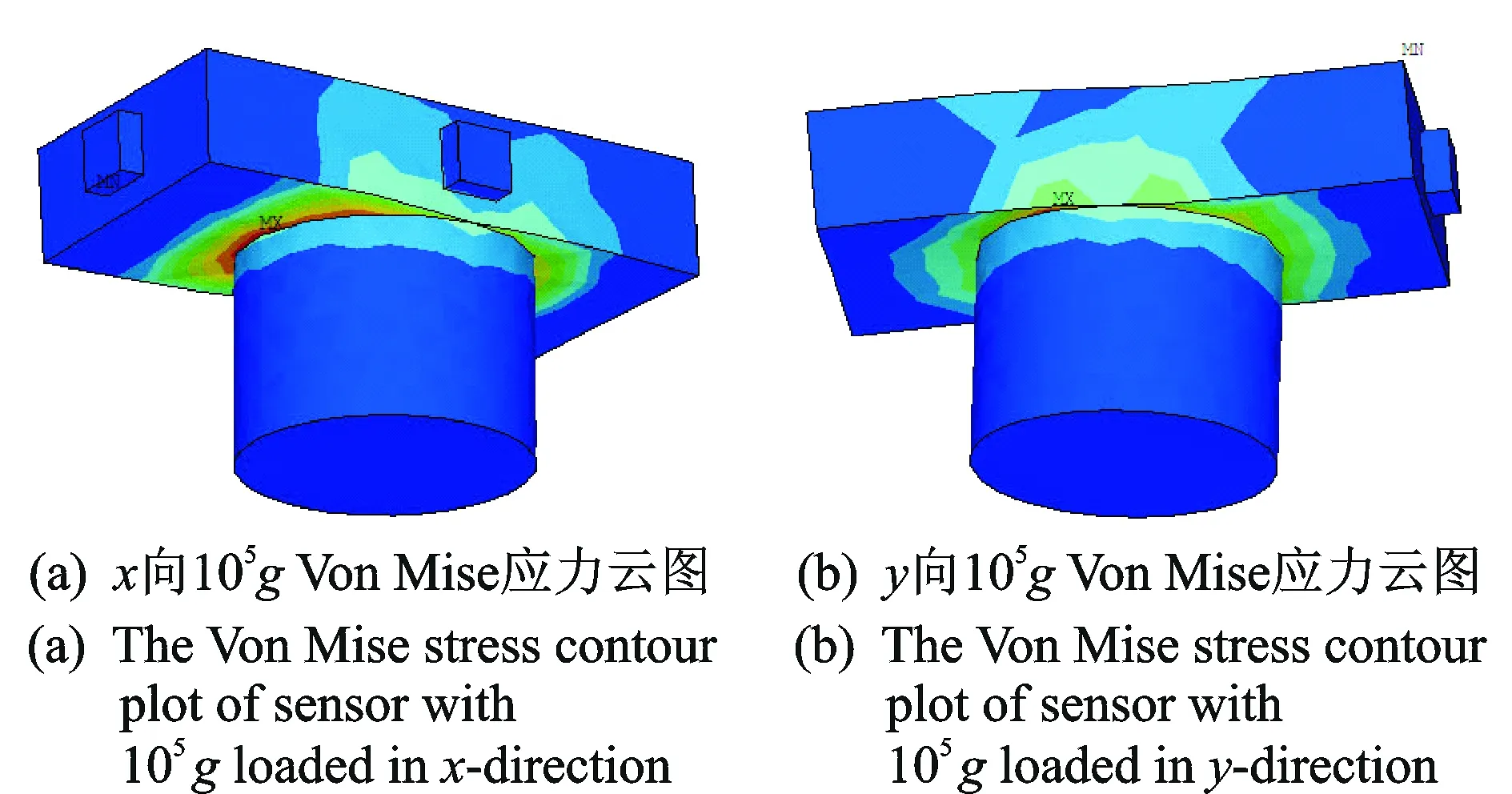
圖7 x向、y向沖擊受力分析Fig.7 Stress analysis with x-direction or y-direction inertial loading
未來將把傳感器結構改為x軸和y軸對稱的正方體,驗證y向沖擊時,相對橫向靈敏度過大的原因。并且將傳感器反向安裝,即相對于初始安裝角度,以方位角θ+π進行測試,完善和深入研究高沖擊三維加速計相對橫向靈敏度的模型。
5 結 論
1) 三維加速度傳感器的擬合直線代替校準曲線計算相對橫向靈敏度,即用擬合直線斜率代替各校準點的橫軸電壓和主軸電壓之比,更便于使用者評價傳感器的性能。
2) 三維加速度傳感器相對橫向靈敏度是橫向靈敏度和主向靈敏度之比,可由式(3)計算,一般不會為0;考慮到高沖擊試驗不宜過多,可由x,y,z的3個沖擊加速度方向中,其他兩軸橫向靈敏度合成后的近似最大值代表最大橫向靈敏度,并依此來進行相對橫向靈敏度計算。
3) 目前三維加速度傳感器相對橫向靈敏度過大,判斷和傳感器結構的非對稱性有關。
[1] 朱沙,李新良,秦宇,等.GB/T 20485.31-2011/ISO 16063-31:2009-2011,振動與沖擊傳感器的校準方法,第31部分:橫向振動靈敏度測試[S]. 北京:中國標準出版社,2012.
[2] 馬明德,李學瑞,張宏宇,等.GB/T 20485.1-2008/ISO16063-1:1998-2008,振動與沖擊傳感器的校準方法,第1部分:基本概念[S]. 北京:中國標準出版社,2008.
[3] ISO 5347-12-1993.Methods for the calibration of vibration and shock pick-ups-part 12:Testing of transverse shock sensitivity[S].Switzerland:International Organization for Standardization,1993.
[4] 陳勤,范樹新.GJB 5439-2005,壓阻式加速度傳感器通用規(guī)范[S]. 北京:總裝備部軍標出版發(fā)行部,2005.
[5] 李彬,鄭賓,劉佳鈺.加速度計橫向靈敏度測試方法研究[J]. 航空兵器,2008,12(6):14-16,22.
Li Bin, Zheng Bin, Liu Jiayu. Research for testing transverse sensitivity of accelerometers[J]. Aero Weaponry,2008,12(6):14-16,22. (in Chinese)
[6] 于景玲,范錦彪.三軸高g值加速度傳感器的橫向效應研究[J]. 傳感器世界,2012,18(6):10-12.
Yu Jingling, Fan Jinbiao. Research on transversal effect of high-g three-axis accelerometer[J]. Sensor World, 2012,18(6):10-12. (in Chinese)
[7] 石云波,朱政強,劉曉鵬,等.高g值加速度計的設計與沖擊特性分析[J]. 爆炸與沖擊,2010,30(3):329-332.
Shi Yunbo,Zhu Zhengqiang, Liu Xiaopeng, et al. Desgin and impact analysis of a high-g accelerometer[J]. Explosion and Shock Waves,2010,30(3):329-332. (in Chinese)
[8] 周智君,石云波,唐軍,等. 一種大量程加速度傳感器的性能測試[J]. 傳感技術學報,2013,26(6):834-836.
Zhou Zhijun, Shi Yunbo, Tan Jun, et al. Performance testing of a high range accelerometer[J]. Chinese Journal of Sensors and Actuators,2013,26(6):834-836. (in Chinese)
[9] 夏烈芳,高鵬,戰(zhàn)豐豐,等.基于Hopkinson桿的高g值沖擊傳感器校準[J]. 電子設計工程,2009,17(8):68-70.
Xia Liefang, Gao Peng, Zhan Fengfeng, et al. Shock sensor calibration for high-g value based on Hopkinson bar[J]. Electronic Design Engineering, 2009,17(8):68-70. (in Chinese)
[10]石云波,趙銳,唐軍,等. 單片三軸大量程加速度傳感器性能測試與分析[J]. 傳感技術學報,2012,25(9):1236-1241.
Shi Yunbo, Zhao Rui, Tang Jun, et al. Testing and analysis of a single-chip triaxial high measure range MEMS accelerometer[J]. Chinese Journal of Sensors and Actuators, 2012,25(9):1236-1241. (in Chinese)
[11]Bao Haifei, Song Zhaohui, Lu Deren, et al. A simple estimation of transverse response of high-g accelerometers by a free-drop-bar method[J]. Microelectronics Reliability, 2009,49(1):66-73.
[12]黎淵.三軸高g加速度計的測試理論與實驗研究[D]. 長沙:國防科學技術大學,2008.
[13]Zhang Zhenhai, Li Kejie. Design, simulation and multi-dimension coupling research of monolithic MEMS three-axis high-g accelerometer[C]∥Proceedings of the 2007 International Conference on Information Acquisition. Seogwipo-si:IEEE, 2007:280-284.
[14]鐘良,趙海云.壓電加速度計橫向靈敏度研究[J]. 傳感器技術,2003,22(12):18-21.
Zhong Liang, Zhao Haiyun. Research on transverse sensitivity of the piezoelectric accelerometers[J]. Journal of Transducer Technology,2003,22(12):18-21. (in Chinese)
[15]Veldman C S. Implementation of an accelerometer transverse sensitivity measurement system[J]. INCSLI Measure, 2013,8(2):40-44.
[16]劉佳鈺,鄭賓.慣性加速度計橫向靈敏度測量方法及特性分析[J]. 彈箭與制導學報,2008,28(4):49-50.
Liu Jiayu. Zheng Bin. The test method and analysis on characteristic of inertia accelerometer transverse sensitivity[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2008,28(4):49-50. (in Chinese)
[17]彭孝東,張鐵民,李繼宇,等.三軸數字MEMS加速度計現(xiàn)場標定方法[J]. 振動、測試與診斷,2014,34(3):544-547.
Peng Xiaodong, Zhang Tiemin, Li Jiyu, et al. Field calibration of three-axis MEMS digital acceleration[J]. Journal of Vibration, Measurement & Diagnosis, 2014,34(3):544-547. (in Chinese)

10.16450/j.cnki.issn.1004-6801.2016.05.016
國防基礎科研項目;國家自然科學基金面上資助項目(61273346);教育部博士點基金資助項目(20121101120009);北京理工大學“優(yōu)青資助計劃”項目(2012YG0203)和基礎研究基金資助項目(2014CX02031)
2015-03-07;
2015-03-25
TP202; TB934; TJ06; TH824.4
林然,男,1983年11月生,博士生。主要研究方向為高g值傳感器與高沖擊校準技術。曾發(fā)表《高g值加速度計高沖擊校準技術綜述》(《探測與控制學報》2015年第37卷第4期)等論文。
E-mail:linhu3456@163.com
簡介:張振海,男,1974年5月生,日本名古屋大學博士、博士后、副教授。主要研究方向為軍用特種MEMS/NEMS微納傳感與測控技術,全景視覺與圖像處理,無人系統(tǒng)環(huán)境感知、識別與控制,微機器人編隊協(xié)同與智能微系統(tǒng),生物MEMS、微納機器人與生物醫(yī)學機器人化微納操作等。
E-mail:zhzhang@bit.edu.cn
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創(chuàng)作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50