輪轂式永磁直流測功機系統的研究
2016-11-23 08:14:27張鐵民黃鵬煥黃沛盛
振動、測試與診斷 2016年5期
張鐵民, 黃鵬煥, 黃沛盛, 黃 翰, 梁 莉
(華南農業大學工程學院/國家生豬種業工程技術研究中心 廣州,510642)
?
輪轂式永磁直流測功機系統的研究
張鐵民, 黃鵬煥, 黃沛盛, 黃 翰, 梁 莉
(華南農業大學工程學院/國家生豬種業工程技術研究中心 廣州,510642)
輪轂電機性能好壞直接影響電動車性能,因此有必要對輪轂電機動態特性進行測試。筆者通過分析永磁直流測功機系統的工作原理,設計了框架式測功機結構,采用雙萬向聯軸器聯接發電機輸出軸、轉矩轉速傳感器和被測電機的輸入軸,并通過一對外嚙合齒輪副建立了發電機與被測電機的機械傳輸鏈。設計了基于脈寬調制信號的直流測功機系統加載電路,采用等效的模擬負載代替真實負載,構建了輪轂式永磁直流測功機系統。實驗結果表明,該輪轂式直流測功機系統結構簡單、控制容易、使用方便,滿足了中小功率輪轂電機的動態特性測試的需要。
模擬負載; 測功機; 輪轂電機; 脈寬調制
引 言
輪轂電機在電動車等領域得到廣泛應用,輪轂電機性能好壞直接影響電動車的性能。為更有效地發揮輪轂電機的優越性能,有必要建立輪轂式永磁直流測功機系統,實現對永磁無刷直流輪轂電機及相應控制器的動、靜態性能測試。文獻[1]將虛擬儀器技術應用在直流無刷輪轂電機試驗臺架上,設計了測控系統電路,并對電機再生制動實驗進行了研究,但采用的磁粉測功機發熱影響到測量精度。文獻[2]針對電動汽車用輪轂電機設計了一套動力總成試驗臺架的硬件及軟件平臺,并通過平臺對輪轂電機和整車控制策略進行了實驗,但其測試對象局限于電動汽車輪轂電機。文獻[3]設計了基于數據采集卡的車用驅動電機臺架,通過臺架實現對電壓、電流、轉速和轉矩的測量和記錄。文獻[4]在基于PROFIBUS現場總線的通訊網絡的基礎上設計了電動汽車電機試驗臺系統,由于采用了現場總線技術,對通信速度提出了較高要求。文獻[5]搭建了以電動汽車用輪轂電機為主體的直流無刷電機再生制動系統試驗臺,并通過Simulink軟件建立了以回收能量最大化為目標的再生制動控制模型。
筆者根據畜禽養殖及設施農業作業的使用需求,設計并構建了適用中小型功率輪轂電機的永磁直流測功機系統,通過實驗驗證該系統的可靠性及穩定性。
1 永磁直流測功機原理
永磁有刷直流電機具有調節負載簡單以及負載特性好等特點,既可以作為電動機拖動被測電機,也可以作為發電機加載,轉速調節范圍大,在額定轉速以下能進行恒轉矩加載,節能環保。當作為發電機時,測功機主機不消耗加載能量,能量可以消耗在測功機負載電阻上,不需要其他介質對其進行冷卻,或者將能量回饋到電網中。考慮本系統的被測電機功率多在2 kW以下,采用負載電阻消耗能量,這樣使得系統控制與機械結構簡單,具有良好的機械特性和調節控制特性。
測功機主機采用永磁有刷直流電機,以對被測電機進行不同工況的負載模擬和輸出的能量進行吸收,從而可以測試被測電機在不同工況下的性能參數[6-7]。該永磁有刷直流電機將被測電機傳遞的機械能轉化為電能,通過測量制動機械支座上的反作用力矩,得到作用在測功機旋轉主軸上的輸入轉矩即被測電機的輸出轉矩[8]。
永磁有刷直流電機功率、轉矩與轉速關系為
P=Tn/9 550
(1)
其中:T為轉矩;n為轉速;P為功率。
由式(1)可知,可通過測量轉矩和轉速大小求得被測電機的功率。
永磁有刷直流電機電刷之間的感應電動勢為
(2)
其中:E為電機電刷之間的感應電動勢;Ce為電勢常數,它是與電機結構有關的函數;φ為主磁通量;n為轉子轉速。
當永磁有刷直流電機作發電機運行時,電磁轉矩為制動轉矩,動力學方程為
T1=T+T0+Jdw(t)/dt
(3)
當永磁有刷直流電機作電動機運行時,電磁轉矩為驅動轉矩,動力學方程為
T=T1+T0+Jdw(t)/dt
(4)
其中:T1為被測電機轉矩;T為永磁有刷直流電機的電磁轉矩;T0為空載轉矩;J為轉子與負載的等效轉動慣量;w(t)為機械角速度。
由于T0較小,通常可忽略不計,永磁有刷直流電機的轉矩平衡方程為
T-T1=Jdw(t)/dt
(5)
由式(5)知,當電機轉速達到穩態時,T=T1,電磁轉矩T由轉矩轉速傳感器測到。
2 永磁直流測功機系統
永磁直流測功機系統由機械系統、電氣系統和被測電機3部分組成,如圖1所示。

圖1 直流測功機系統框圖Fig.1 System diagram of DC dynamometer
測功機采用框架式機械結構,被測電機通過一對外嚙合直齒輪與發電機的輸出軸聯接,為避免轉矩轉速傳感器與發電機輸出軸及被測電機的輸入軸軸心不對中,采用二個萬向節聯軸器聯接發電機輸出軸、轉矩轉速傳感器和被測電機的輸入軸,并在外嚙合齒輪副上安裝防護罩,如圖2所示。
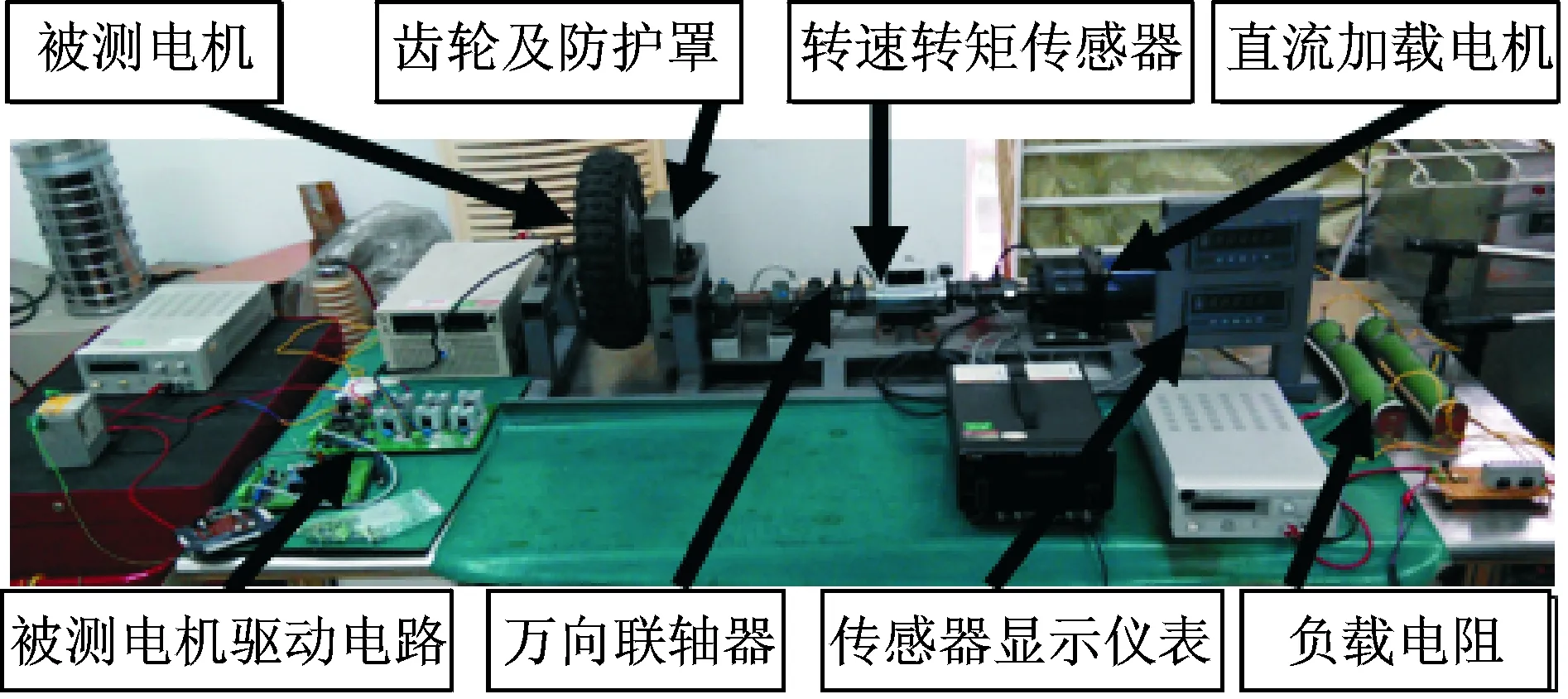
圖2 直流測功機系統結構實物圖Fig.2 DC dynamometer system structure
測功機電氣系統包括永磁有刷直流電機、轉速轉矩傳感器、負載電阻、控制電路、信號發生器、開關電源和顯示儀表等。
永磁有刷直流電機作為加載電機,其定子包括產生勵磁磁場的主磁極、具有固定主磁極功能并兼作磁路的機座、電刷裝置以及改善換向的換向極,定子通過機械機構支撐電機并產生勵磁磁場。轉子包括電樞鐵心、電樞繞組以及換向器,實現電能與機械能之間的轉換[9]。永磁有刷直流電機也可吸收被測電機輸出的機械能并轉換成電能,通過后級負載電阻消耗掉。
選用北京博銳創科技有限公司生產的BRH8200傳感器為轉速轉矩傳感器,其轉矩量程為200 N·m,精度為0.5%,轉速量程為5 000 r/min,配備扭矩及轉速顯示儀表。
BHR8200的轉矩測量傳感器采用應變片電測技術,在彈性軸上組成應變橋,當向應變橋供電時,即可測得彈性軸上所受扭力的電信號。通過放大該應變信號后,再經過壓/頻轉換,得到與扭力應變橋成正比的頻率信號,如圖3所示。
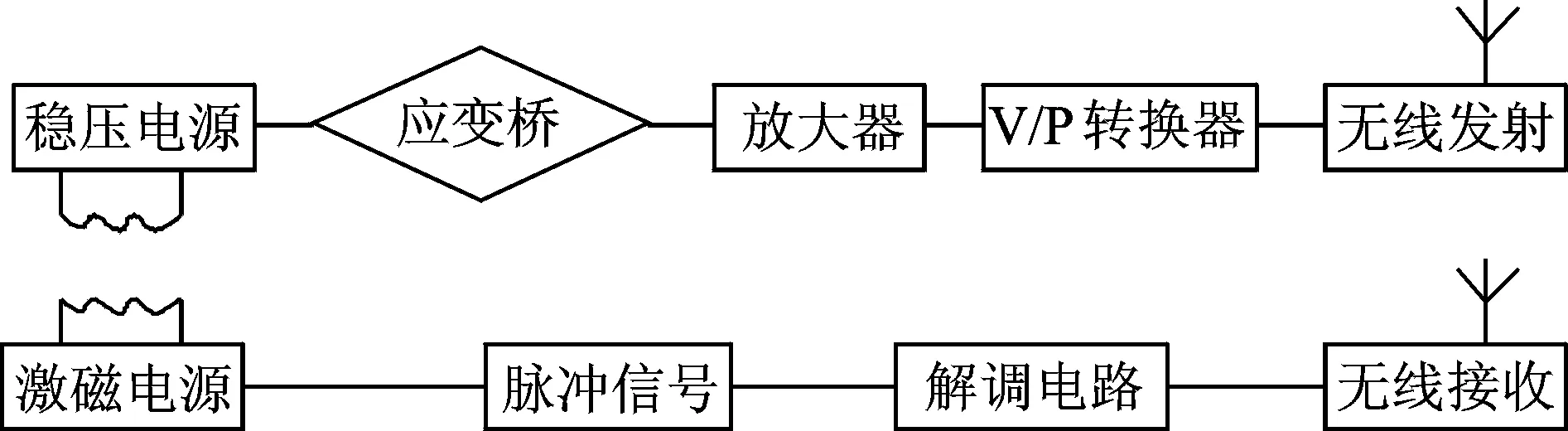
圖3 傳感器原理圖Fig.3 Schematics of torque sensor
BHR8200的轉速測量傳感器采用磁電碼盤,每一個磁電碼盤上有60個齒,通過軸帶動磁電碼盤,則每旋轉一周即可產生60個脈沖,高速或中速時用測頻方法測量轉速,低速時用測周期方法測量轉速。
在測量范圍內,控制電路能對直流加載電機進行恒轉速和恒轉矩控制,即當被測電機輸出轉矩改變時,系統可提供恒定的任意轉速;當被測電機的輸出轉速改變時,系統可提供恒定的負載轉矩[10]。
控制電路由信號發生器輸出PWM脈沖信號,控制電力MOS管FQA70N10的開關狀態,改變永磁有刷直流電機電樞電流大小,以改變作為發電機狀態時所產生的反力矩。FQA70N10屬于N溝道MOSFET,是一種單極型電壓控制器件,通過柵極電壓控制漏極電流,其電壓等級為100 V,額定電流為70 A,輸入阻抗高,輸入電流小,工作頻率可達幾十kHz,耐破壞性強,熱穩定性能優于多數其他功率器件。為了保護MOSFET,確保MOSFET過載電流的能力,控制電路采用了兩片FQA70N10并聯電路。
為了避免強弱電互相干擾,設計了基于帶光電隔離的MOS管驅動芯片TLP250芯片的驅動電路,控制電路如圖4所示。M1,M2分別接永磁有刷直流電機的兩個輸入端,PWM信號經過TLP250隔離輸出控制兩個并聯的MOS管FQA70N10,負載電阻R17與永磁有刷直流電機串聯,電機工作電流隨著PWM信號改變。負載電阻為兩個5 Ω,500 W陶瓷電阻并聯。當永磁有刷直流電機以發電機方式工作時,其輸出的電能直接消耗在陶瓷電阻上。

圖4 控制電路圖Fig.4 Control schematic
3 實驗結果與分析
筆者設計的永磁直流測功機系統所用的加載電機為永磁有刷直流電機,其直流額定電壓為60 V、電流為50 A、轉速為3 000 r/min、功率為2.5 kW。選用常用的無刷直流輪轂電機為被測電機,其直流額定電壓為48 V,500 W。選取5個性能參數相同的無刷直流輪轂電機對其進行編號,1~4號電機為裝有橡膠輪胎,5號電機為無輪胎,如圖5所示。

圖5 無刷直流輪轂電機Fig.5 Brushless DC hub motor
當被測電機的速度設定值為150 r/min時,1~5#被測電機的轉矩與轉速關系如圖6所示。可以看出1~5#電機轉矩與轉速的對應關系,被測電機的轉矩/轉速變化規律相同,重復性好。

圖6 150 r/min時轉矩與轉速關系Fig.6 Torque and speed at 150 r/min
被測電機保護電路限流10 A,當被測電機轉速為150 r/min時,被測電機始終處于速度閉環控制下,并未觸發保護電路。對1~5#被測電機的轉矩、轉速實驗數據進行線性擬合,經計算得到
Y1=1.054 5X1+148.351 9
(6)
Y2=0.703 6X2+150.231 8
(7)
Y3=0.706 5X3+148.867 9
(8)
Y4=0.661 7X4+149.129 9
(9)
Y5=0.116 9X5+150.701 9
(10)
式(6)~(9)分別為1~4#被測電機擬合曲線表達,式(10)為無輪胎電機擬合曲線。
當轉速為150 r/min時,1~4#被測電機分別與5#無輪胎電機轉矩和轉速的相關性如表1所示。1~4#被測電機之間轉矩和轉速的相關性如表2所示。
從表1~2可以看出,1~4#電機轉矩、轉速之間線性相關性都在0.99以上,1~4#電機與5#電機轉矩、轉速相關性也在0.99以上,這幾個電機的轉速轉矩特性一致性較好。
表1 5#電機與1#~4#被測電機轉矩與轉速相關性(轉速為300 r/min)

Tab.1 5# Correlation of torque and speed(speed at 300 r/min)
表2 1#~4#被測電機間轉矩與轉速相關性(轉速為150 r/min)
Tab.2 1#~4# Correlation of torque and speed(speed at 150 r/min)
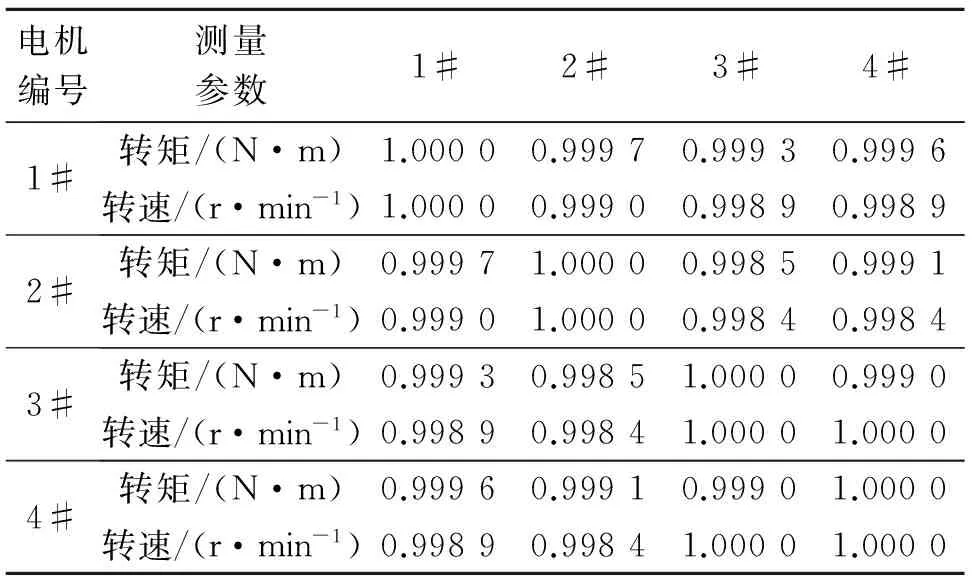
電機編號測量參數1#2#3#4#1#轉矩/(N·m)1.00000.99970.99930.9996轉速/(r·min-1)1.00000.99900.99890.99892#轉矩/(N·m)0.99971.00000.99850.9991轉速/(r·min-1)0.99901.00000.99840.99843#轉矩/(N·m)0.99930.99851.00000.9990轉速/(r·min-1)0.99890.99841.00001.00004#轉矩/(N·m)0.99960.99910.99901.0000轉速/(r·min-1)0.99890.99841.00001.0000
當被測電機速度設定值為150 r/min時,1~5#被測電機轉矩與電流關系如圖7所示。可見,1~5#電機轉矩與電流的變化規律相同,重復性好。
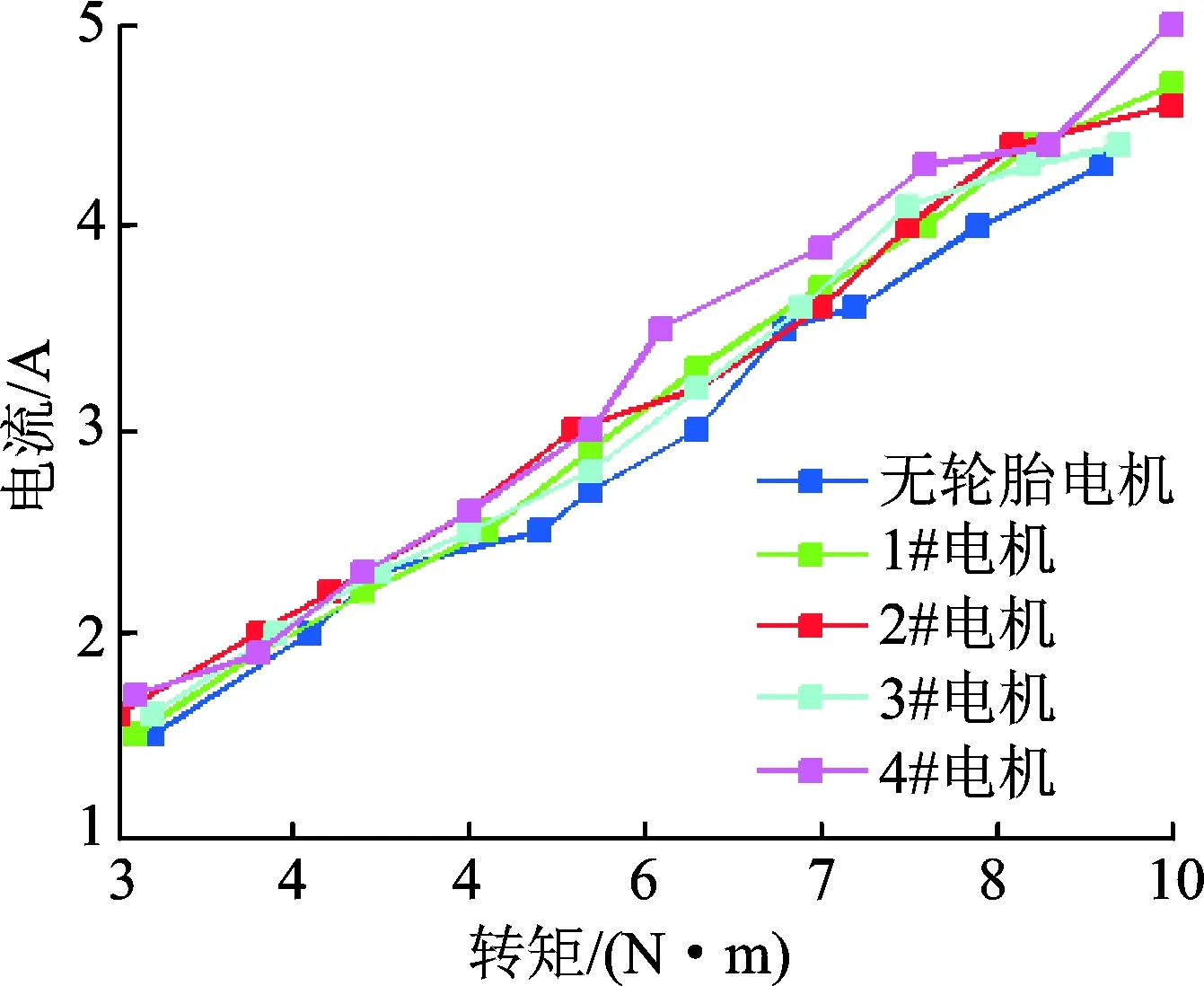
圖7 150 r/min時轉矩與電流關系Fig.7 Torque and current at 150 r/min
從表3~4可以看出,1~4#電機轉矩、電流之間線性相關性都在0.99以上,1~4#電機與5#電機轉矩、電流之間相關性也在0.99以上,轉速轉矩特性一致性較好。
同樣,對1~5#被測電機的轉矩、轉速實驗數據進行線性擬合,經計算得到
Y1= 0.557 9X1-0.248 6
(11)
Y2= 0.520 5X2+0.022 9
(12)
Y3= 0.535 4X3-0.127 2
(13)
Y4= 0.574 2X4-0.185 3
(14)
Y5= 0.521 8X5-0.175 1
(15)
式(11)~式(14)分別為1~4#被測電機擬合曲線表達式,式(15)為無輪胎電機擬合曲線表達式。
當轉速為150 r/min時,1~4#被測電機分別與5#無輪胎電機轉矩和電流的相關性如表3表所示。1~4#被測電機之間轉矩和電流的相關性如表4所示。被測電機的保護電路限流為10 A,在測功機對被測電機進行模擬加載的過程中,被測電機處于速度閉環、電流截止的控制下,過載導致觸發保護電路,速度急速下降,對1~5號被測電機的轉矩、轉速實驗數據進行線性擬合,經計算得到
表3 5#電機與1#~4#被測電機轉矩與電流的相關性(轉速為150 r/min)
Tab.3 5# Correlation of torque and current(speed at 150 r/min)

電機參數1#2#3#4#5#轉矩/(N·m)0.99740.99740.99580.9953電流/A0.99600.99320.99100.9894
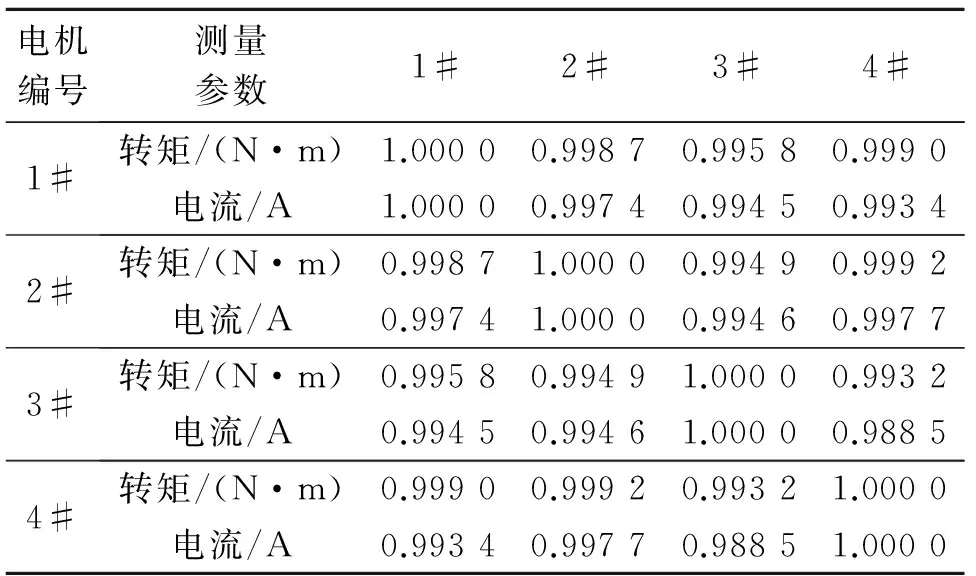
表4 1#~4#被測電機之間轉矩與電流的相關性(轉速為150 r/min)
Tab.4 1#~4# Correlation of torque and current(speed at 150 r/min)
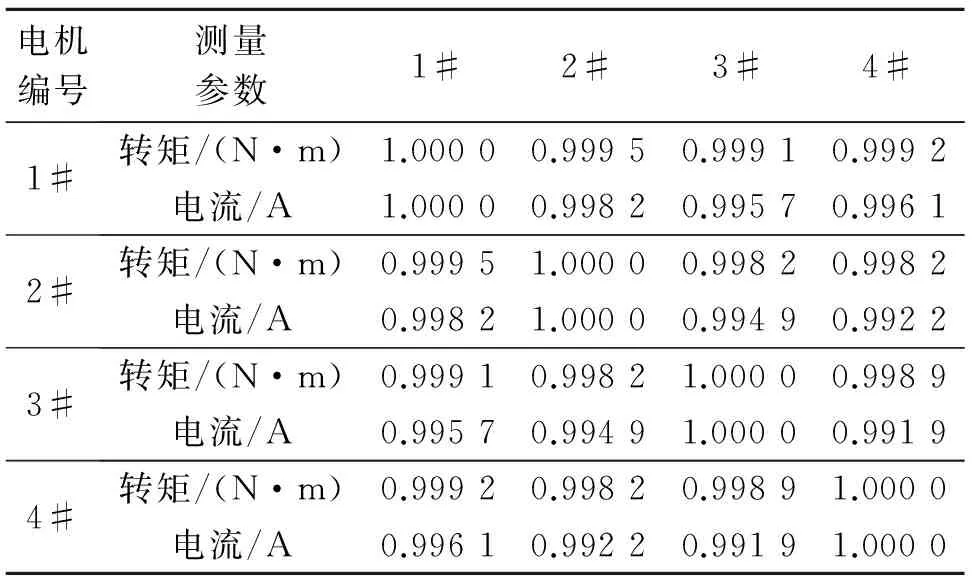
電機編號測量參數1#2#3#4#1#轉矩/(N·m)1.00000.99950.99910.9992電流/A1.00000.99820.99570.99612#轉矩/(N·m)0.99951.00000.99820.9982電流/A0.99821.00000.99490.99223#轉矩/(N·m)0.99910.99821.00000.9989電流/A0.99570.99491.00000.99194#轉矩/(N·m)0.99920.99820.99891.0000電流/A0.99610.99220.99191.0000
式(16)~(19)分別為1~4#被測電機擬合曲線表達式,式(20)為無輪胎電機擬合曲線表達式。
當被測電機的速度設定值為300 r/min時,1~5#被測電機的轉矩與轉速關系如圖8所示,被測電機的轉矩/轉速變化規律相同,重復性較好。
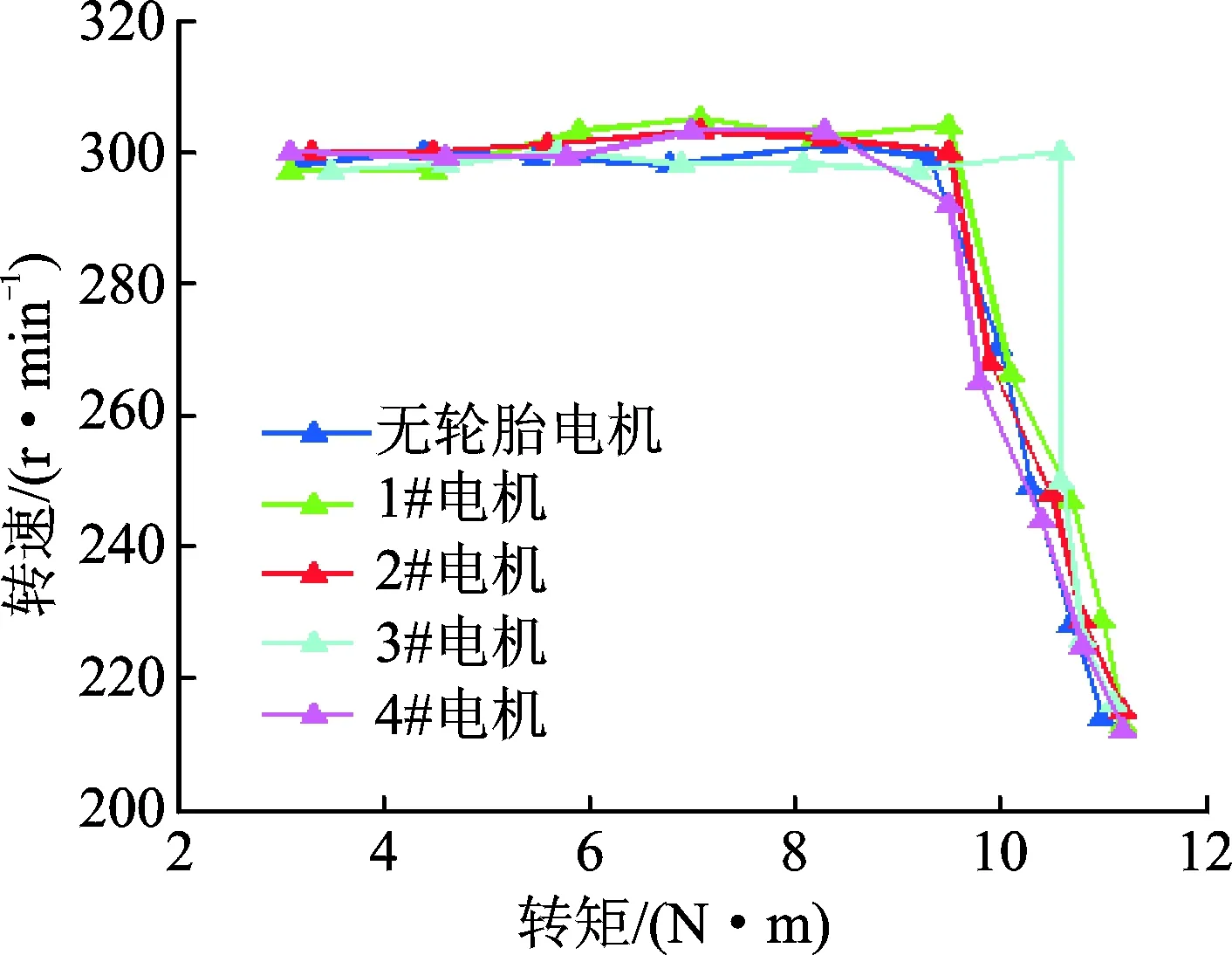
圖8 300 r/min時轉矩與轉速關系圖Fig.8 Torque and speed at 300 r/min
當轉速為300 r/min時,1~4#被測電機分別與5#無輪胎電機轉矩和轉速的相關性如表5所示。1~4#被測電機之間轉矩和轉速的相關性如表6所示,其轉矩和轉速均具有較好相關性。
表5 5#電機與1#~4#被測電機轉矩與轉速相關性(轉速為300 r/min)
Tab.5 5# Correlation of torque and speed(speed at 300 r/min)

電機1#2#3#4#5#轉矩/(N·m)0.99780.99900.99630.9982轉速/(r·min-1)0.99530.99860.95730.9952
表6 1#~4#被測電機間轉矩與轉速相關性(轉速為300 r/min)
Tab.6 1#~4# Correlation of torque and speed(speed at 300 r/min)
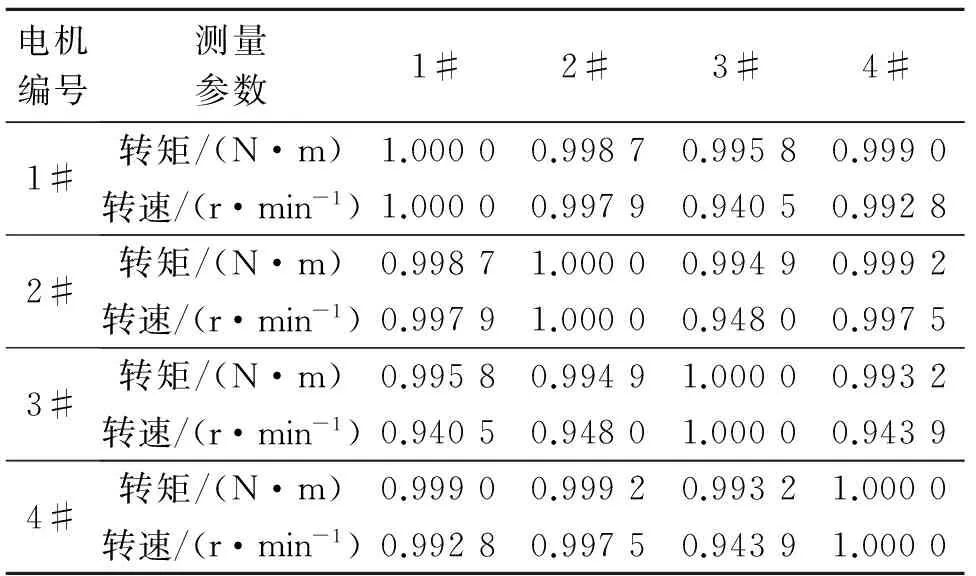
電機編號測量參數1#2#3#4#1#轉矩/(N·m)1.00000.99870.99580.9990轉速/(r·min-1)1.00000.99790.94050.99282#轉矩/(N·m)0.99871.00000.99490.9992轉速/(r·min-1)0.99791.00000.94800.99753#轉矩/(N·m)0.99580.99491.00000.9932轉速/(r·min-1)0.94050.94801.00000.94394#轉矩/(N·m)0.99900.99920.99321.0000轉速/(r·min-1)0.99280.99750.94391.0000
當被測電機的速度設定值為300 r/min時, 1~5#被測電機的轉矩與電流的關系分別如圖9所示,可以看出被測電機的轉矩/電流變化規律相同,重復性好。
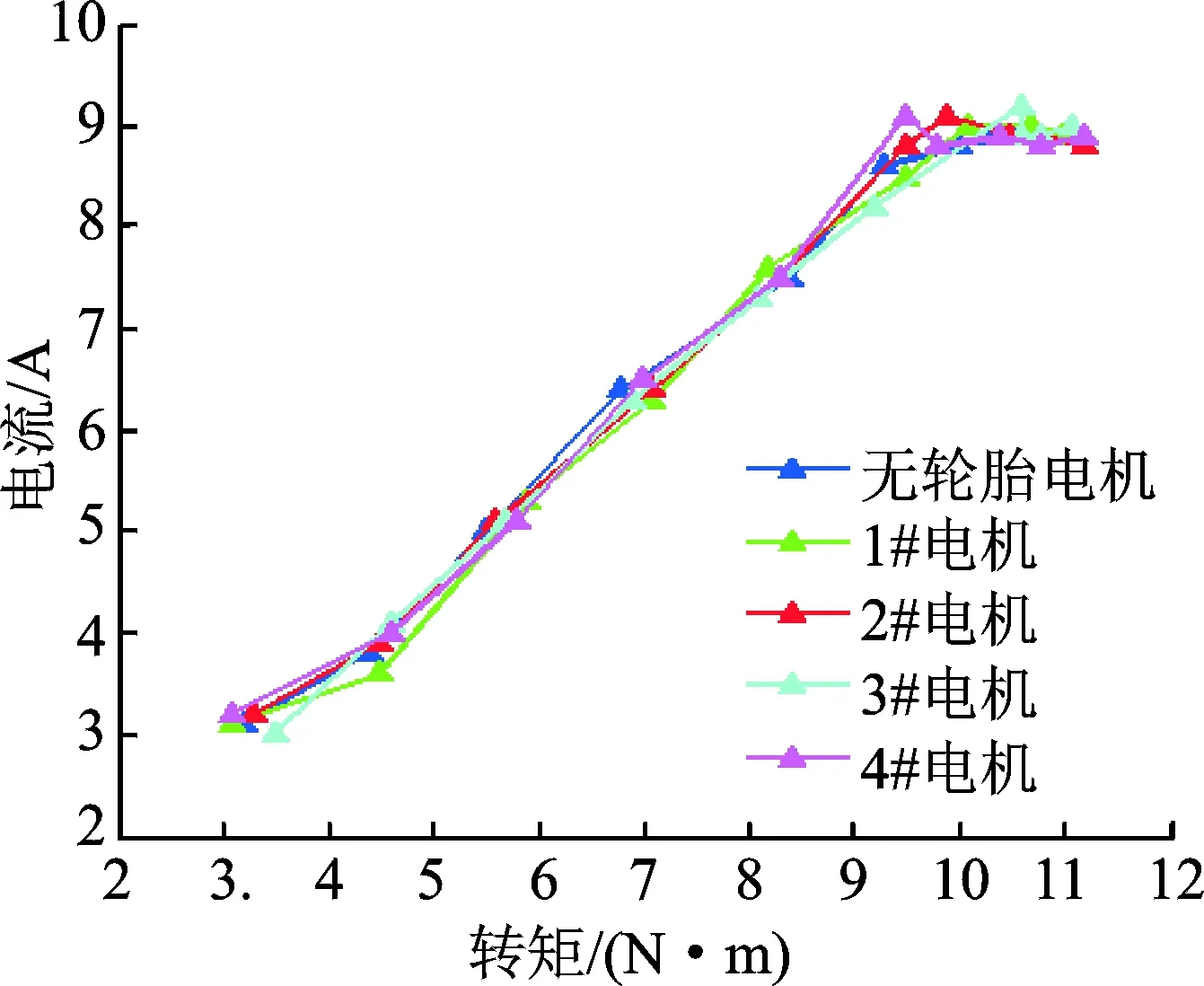
圖9 300 r/min時轉矩與電流關系圖Fig.9 Torque and current at 300 r/min
經過計算分別得到其擬合曲線關系式
式(21)~式(24)分別為1~4#被測電機擬合曲線表達式,式(25)為無輪胎電機擬合曲線表達式。
當轉速為300 r/min時,1~4#被測電機分別與5#無輪胎電機轉矩和電流的相關性如表7所示, 1~4#被測電機之間轉矩和電流的相關性如表8所示。
表7 5#電機與1#~4#被測電機轉矩及電流相關性(轉速為300 r/min)
Tab.7 5# Correlation of torque and current(speed at 300 r/min)

電機編號1#2#3#4#5#轉矩/(N·m)0.99780.99900.99630.9982電流/A0.99780.99850.99470.9969
表8 1#~4#被測電機間轉矩及電流相關性(轉速為300 r/min)
Tab.8 1#~4# Correlation of torque and current(speed at 300 r/min)
電機編號測量參數1#2#3#4#1#轉矩/(N·m)1.00000.99870.99580.9990電流/A1.00000.99740.99450.99342#轉矩/(N·m)0.99871.00000.99490.9992電流/A0.99741.00000.99460.99773#轉矩/(N·m)0.99580.99491.00000.9932電流/A0.99450.99461.00000.98854#轉矩/(N·m)0.99900.99920.99321.0000電流/A0.99340.99770.98851.0000
4 結束語
筆者設計的輪轂式永磁直流測功機系統可實現對0.1~2.0 kW輪轂電機進行轉速、轉矩及效率等測量。當被測電機的轉速設定值為150, 300 r/min時,測得1~4#未裝橡膠輪胎的被測電機性的性能參數變化規律一致,重復性好,被測電機運行較為穩定和可靠。未裝橡膠輪胎的1~4#輪轂電機性能參數與有裝橡膠輪胎的5#輪轂電機性能參數相近,變化規律相同。1~4#電機與5#電機轉矩、電流之間相關性在0.99以上,這幾個電機的轉速轉矩特性一致性好。該測功機可為被測電機提供大小可調的不同負載,運行穩定、響應速度較快,具有高可靠性、精確性和實用性,能夠滿足2 kW以下輪轂電機及盤式直流電機性能參數測試的需要。
[1] 董鑄榮,梁松峰,田超賢. 純電動汽車用直流無刷輪轂電機試驗臺架的研究與開發[J]. 機電工程, 2012, 29(10):1187-1190.
Dong Zhurong,Liang Songfeng,Tian Chaoxian. Study and development of test-bed for brushless DC hub-motor used in EV[J]. Journal of Mechanical & Electrical Engineering, 2012, 29(10):1187-1190.(in Chinese)
[2] 郭嘯峰,吳森. 輪轂電機式電動汽車試驗臺的設計與實驗[J]. 武漢理工大學學報:信息與管理工程版,2013,35(6):859-862.
Guo Xiaofeng,Wu Sen. Design and experiment study of test bench for in-wheel motor electric vehicles [J]. Journal of Wuhan University of Technology:Information & Management Engineering, 2013, 35(6):859-862.(in Chinese)
[3] 楊文敬,宋強. 車用驅動電機臺架試驗測試系統設計[C]∥第五屆中國智能交通年會暨第六屆國際節能與新能源汽車創新發展論壇優秀論文集(下冊)——新能源汽車.深圳:[s.n.],2009:398-403.
[4] 粟明. 基于現場總線的電動汽車電機試驗臺系統[J]. 電工文摘, 2011,31(3):15-18.
Su Ming. Electric vehicle motor test bench system based on Fieldbus[J].Diangong Wenzhai, 2011,31(3):15-18.(in Chinese)
[5] 隋妮,王廣萍,李仲興,等. 直流無刷電機再生制動系統試驗臺的設計與驗證[J]. 汽車技術, 2011,42(1):49-53.
Sui Ni,Wang Guangping,Li Zhongxing, et al. Design and verification of brushless dc motor regenerative braking system test bench [J]. Automobile Technology, 2011, 42(1):49-53.(in Chinese)
[6] 李茂森. 動力試驗與測功機技術[J]. 電機與控制應用, 2006, 48(9):43-45.
Li Maosen. Power-train and dynamometer technology [J]. Electric Machines & Control Application, 2006, 48(9):43-45.(in Chinese)
[7] 張鐵民,黃瀚,黃鵬煥. 電動輪式移動小車控制系統設計與試驗[J]. 農業工程學報, 2014, 30(19):11-18.
Zhang Tiemin,Huang Han,Huang Penghuan . The design of power dynamometer experimental system [J]. Transaction of the Chinese Society of Agricultural Engineering, 2014, 30(19):11-18. (in Chinese)
[8] 樊志忠,殷沂柏. 一種新型的電機測功機[J]. 微電機, 1990,23(2):32-36.
Fan Zhizhong,Yin Qibai. A new motor dynamometers[J]. Micromotors Servo Technique, 1990, 23(2):32-36. (in Chinese)
[9] 張鐵民,李輝輝,陳大為,等. 多源傳感器信息融合的農用小車路徑跟蹤導航系統[J]. 農業機械學報,2015, 46(3):37-42.
Zhang Tiemin,Li Huihui,Chen Dawei,et al. The Design of power dynamometer experimental system [J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(3):37-42. (in Chinese)
[10]許水平,施蔚加,張文軍. 電動汽車電傳動試驗系統[J]. 大功率變流技術, 2009,32(3):41-44.
Xu Shuiping,Shi Weijia,Zhang Wenjun. Test system for electric vehicle drive system [J]. High Power Converter Technology, 2009, 32(3):41-44. (in Chinese)
[11]許彥峰,孫漢旭,賈慶軒,等. 直流無刷電機故障檢測與診斷的仿真模型[J]. 振動、測試與診斷, 2005, 25(3):190-192.
Xu Yanfeng,Sun Hanxu,Jia Qingxuan,et al. Simulation model of fault detection for brushless dc motor using parameter estimation[J].Journal of Vibration,Measurement & Diagnosis, 2005, 25(3):190-192. (in Chinese)
[12]田穎,金振華,盧青春. 基于PWM控制的電渦流測功機控制器的開發[J]. 汽車工程, 2010, 32(1):69-72.
Tian Ying,Jin Zhenhua,Lu Qingchun. Development of the controller for eddy current dynamometer based on pwm control [J]. Automotive Engineering, 2010,32(1):69-72. (in Chinese)
[13]相龍洋,左曙光,何呂昌,等. 電動汽車及其驅動永磁電機聲振特性試驗[J]. 振動、測試與診斷, 2014, 34(1):90-95.
Xiang Longyang,Zuo Shuguang,He Lüchang,et al. Experimental study on acoustic and vibration characteristics of electric vehicle and its permanent drive motor[J].Journal of Vibration,Measurement & Diagnosis, 2014,34(1):90-95. (in Chinese)
[14]Hadef M, Rachid Mekideche M. Moments and pasek′s methods for parameter identification of a DC motor[J]. Journal of Zhejiang University—Science C: Computers & Electronics, 2012, 12(2):124-131.
[15]黃晨,陳龍,袁朝春,等. 車輛底盤系統的快速原型仿真平臺設計[J]. 振動、測試與診斷, 2013, 33(S2):91-94.
Huang Chen,Chen Long,Yuan Chaochun,et al. The design of the rapid prototype simulation platform for vehicle chassis system[J].Journal of Vibration,Measurement & Diagnosis, 2013, 33(S2):91-94. (in Chinese)

10.16450/j.cnki.issn.1004-6801.2016.05.002
*國家高技術研究發展計劃(“八六三”計劃)資助項目(SS2013AA100303); 廣東省科技計劃資助項目(2016A020209 008)
2014-07-26;
2014-10-14
TM306; TH39
張鐵民,男,1961年11月生,博士、教授、博士生導師。主要研究方向為智能檢測與控制技術、機電系統控制、自動化以及機器人技術。曾發表《四旋翼飛行器農田位置信息采集平臺設計與實驗》(《農業機械學報》2013年第44卷弟5期)等論文。
E-mail: tm-zhang@163.com