流量振動控制在挖掘特性分析中的應用*
2016-11-23 11:07:32莊靜偉
振動、測試與診斷 2016年3期
韓 軍, 徐 亮, 肖 偉, 莊靜偉, 顧 俊
(總裝工程兵科研一所 無錫,214035)
?
流量振動控制在挖掘特性分析中的應用*
韓 軍, 徐 亮, 肖 偉, 莊靜偉, 顧 俊
(總裝工程兵科研一所 無錫,214035)
建立了挖掘工作裝置坐標變換、振動驅動機構和求解振動挖掘力的理論模型,在鏟斗驅動油缸上施加靜力挖掘和振動挖掘流量復合控制信號,分析了不同頻率、波形和流量控制比例條件下,振動挖掘作業的挖掘力特性、軌跡分布以及作業效率。在流量振動控制信號中,利用傅里葉級數方法解決了方波、三角波信號在常規條件不能求導的技術難題,并用數值計算方法和試驗對流量振動控制模型進行了驗證、分析。結果表明,基于鏟斗油缸驅動的振動挖掘作業為一維振動挖掘,方波流量振動控制信號可獲得較大的振動挖掘力,增加振動頻率和流量控制比例可增加振動挖掘力。研究為振動挖掘控制參數的選擇提供了理論依據。
振動挖掘; 挖掘力; 動力學分析; 流量振動控制
引 言
振動挖掘作業系統是在普通液壓挖掘機的基礎上,嵌入了振動挖掘驅動控制模塊,通過液壓驅動挖掘作業裝置的機構產生高速往復運動,使挖掘鏟斗在常規靜力挖掘力上疊加了振動沖擊力,作用于挖掘土壤,以降低挖掘切削阻力,提高作業效率[1-2]。在液壓挖掘機振動挖掘作業控制試驗研究中,液壓驅動振動機構運動表現為很強的流量振動控制特征,流量振動控制是振動挖掘機構動力學研究的一個重要方面。
目前,對于振動挖掘方面的研究主要集中于振動切削機理方面[3-7]。Saqib等[3]研究了在甜薯收獲機上利用振動挖掘鏟的作業方法,研究了振動頻率、幅值和前進速度對土塊大小、密度和破碎方面的影響,得出了當振動鏟相對于靜力挖掘,可有效地降低土塊的密度,當振動鏟的振動加速度值達到3g時,可有效降低土壤密度(打碎)。Niyamapa等[4]研究了振動耕作工具與土壤的破碎機理之間的關系,試驗表明由于振動作用,土壤出現脆性破壞時具有月牙形狀的破壞面,隨著振動速度增加,土塊尺寸將減小。Muro等[5]針對凝灰巖材料,研究了振動切削頻率、幅值和切削速度,以及獲得最大挖掘力的振動波形,結果表明,振動時水平切削阻力與無振動時的水平切削阻力比,呈雙曲線下降趨勢,切削能量隨著切削速度的增加呈雙曲線下降趨勢,正弦波振動相對于三角波振動所需的能耗較小。文獻[6]研究了振動掘削巖土的減阻機理,結果表明,振動載荷能夠使土壤的內摩擦角變小,抗剪強度下降,最大主應力值減小,從而導致挖掘阻力降低,振動掘削最大掘削阻力可降低50%。文獻[7]提出了基于最小二乘支持向量機(least squares support vector machines,簡稱LS-SVM)的液壓挖掘機振動掘削過程土壤參數在線辨識算法,進行了土壤固有頻率等參數的在線辨識仿真和試驗研究。
目前,隨著液壓振動技術[8]的發展,通過液壓多路換向閥雙閥芯控制技術實現振動挖掘的參數化控制成為可能。雙閥芯控制模式提供了換向閥控制的靈活性,通過軟件編程可對執行機構出口進行壓力、流量或壓力流量組合控制[9],其控制頻率、波形和振動與靜力挖掘流量控制比例參數,對振動挖掘特性具有重要的影響。筆者建立了振動挖掘裝置的理論模型,給出了流量振動控制信號模型,對某型液壓挖掘機利用數值計算方法分析了不同頻率、波形和流量控制比例條件下,振動挖掘力的特性、軌跡分布和作業效率,為振動挖掘控制參數選擇提供理論基礎,并利用試驗對理論計算模型和部分仿真計算結果進行了驗證。
1 振動挖掘裝置理論模型
1.1 挖掘裝置平面坐標變換
圖1為某型液壓挖掘機作業裝置運動學模型,以回轉平臺支承中心點O為坐標原點,建立基{A}坐標系O-xyz;以動臂回轉點O1為坐標原點建立基{B}坐標系O1-x1y1z1;以斗桿回轉點O2為坐標原點建立{C}坐標系O2-x2y2z2;以鏟斗回轉點O3為坐標原點建立{D}坐標系O3-x3y3z3。α1為{B}坐標系相對{A}坐標系旋轉角度,α2為{C}坐標系相對{B}坐標系旋轉角度,α3為{D}坐標系相對{C}坐標系旋轉角度。
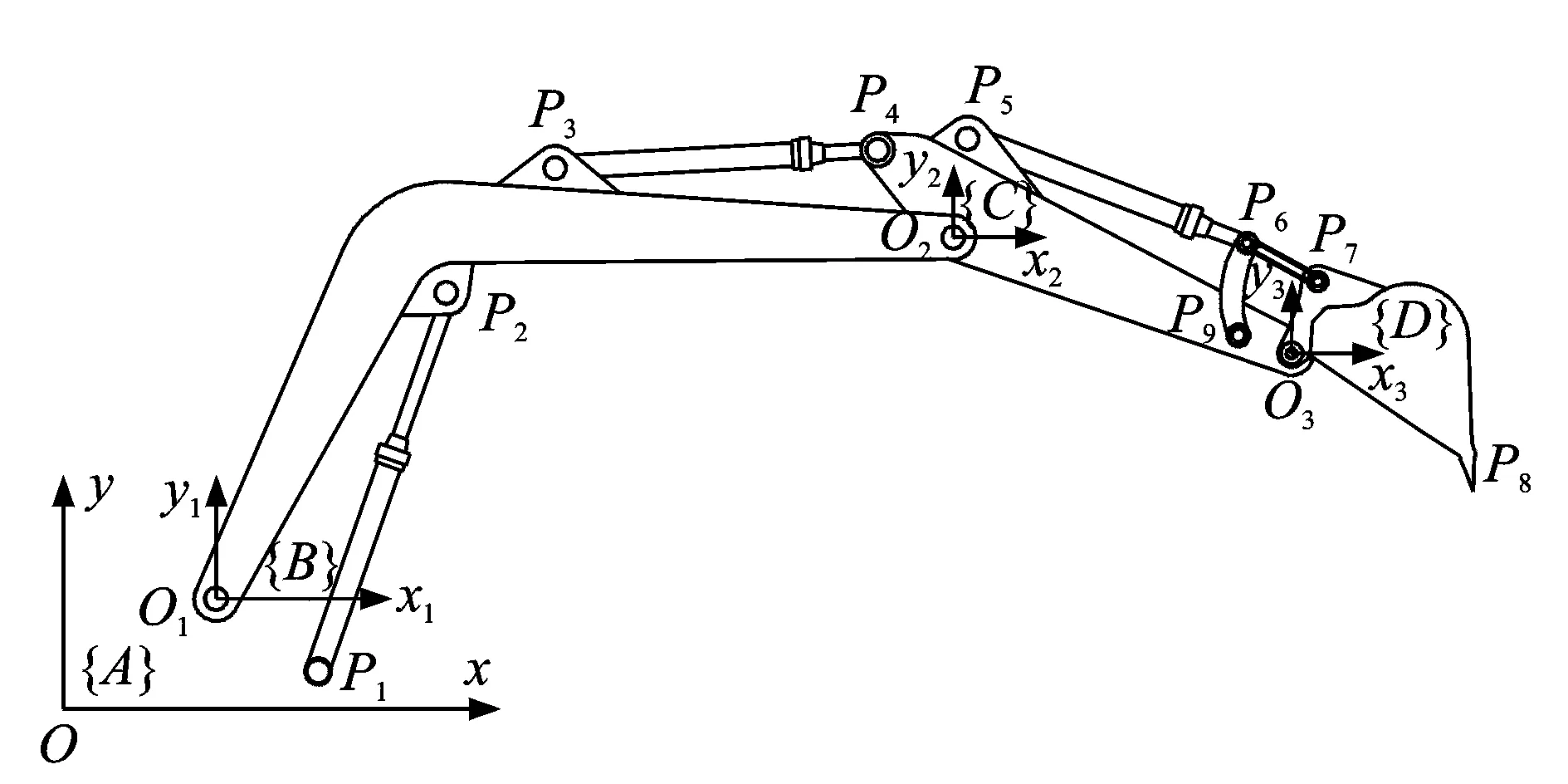
圖1 挖掘作業裝置運動學模型Fig.1 Kinematics model of excavating device
(1)
(2)
(3)
式(1)~(3)中,AO1x,AO1y分別為O1點相對于{A}坐標系的坐標;BO2x,BO2y分別為O2點相對于{B}坐標系的坐標;CO3x,CO3y分別為O3點相對于{C}坐標系的坐標。這樣,可以得到Pi點在{A}坐標系內的表達APi(i= 2,3,…,9),分別為
(4)
其中:BPi(i=2,3)為Pi點在{B}坐標系內的
(5)
其中:CPi(i=4,5,9)為Pi點在{C}坐標系內的
(6)
其中:DPi(i=7,8)為Pi點在{D}坐標系內的表達。
另外,點A0O2和A0O3的變換關系分別為
(7)
(8)
利用式(1)~(8)可以得到鏟斗斗齒點P8的相對于基坐標系{A0}的坐標,即在回轉、動臂油缸、斗桿油缸和鏟斗油缸變量作用下的運動軌跡。
1.2 振動驅動機構運動學模型
挖掘機振動挖掘作業是通過鏟斗油缸產生振動,首先驅動三角形機構P5P6P9,然后再驅動四連桿機構P6P7P9O3,使鏟斗產生振動,進行振動挖掘作業。首先分析三角形P5P6P9驅動機構關系,如圖2所示。
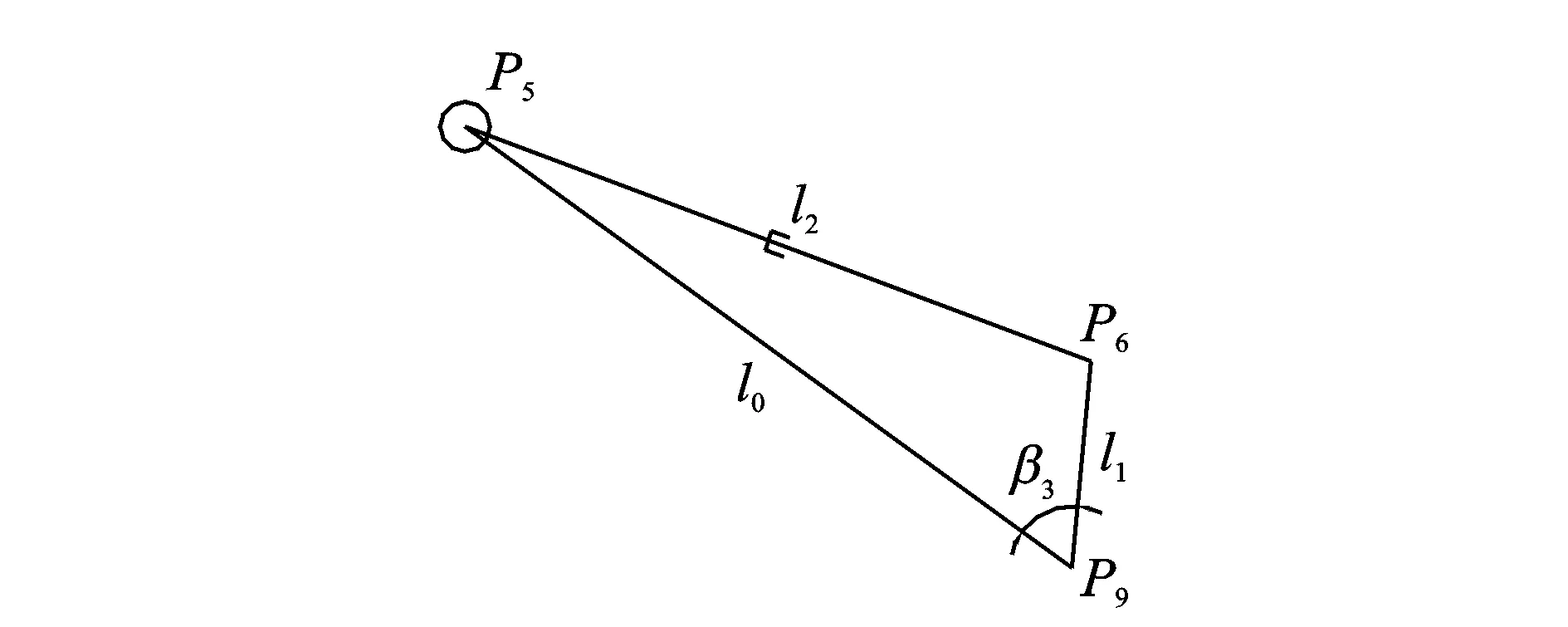
圖2 三角形驅動機構Fig.2 Kinematics model of bucket′s cylinder rod
(9)
其中:l20為油缸未伸縮時的長度,即|P5P6|;l2x(t)為手動控制時油缸的伸長量,l2x(t)=qS(t)/S0,S0為鏟斗油缸的大腔截面積;Δl2(t)為油缸輸入液壓振動信號時的位移量,Δl2(t)=qV(t)/S0,qV(t)可以是三角波、正弦或方波函數。
對式(9)求t的1階和2階導數,有
(10)
(11)
式中的1階、2階導數分別表示液壓油缸手動控制與自動控制振動時的速度、加速度值。
(12)
(13)
式(13)兩邊分別對時間函數t求1次、2次導
(14)
(15)

利用矢量法[11]建立雙搖桿四連桿機構P6P7P9O3的運動學方程,如圖3所示,有

對式(16)兩邊分別求t的1階和2階導數,并已知P9O3為連接架,ω1=0,ε1=0,有
(17)
(18)

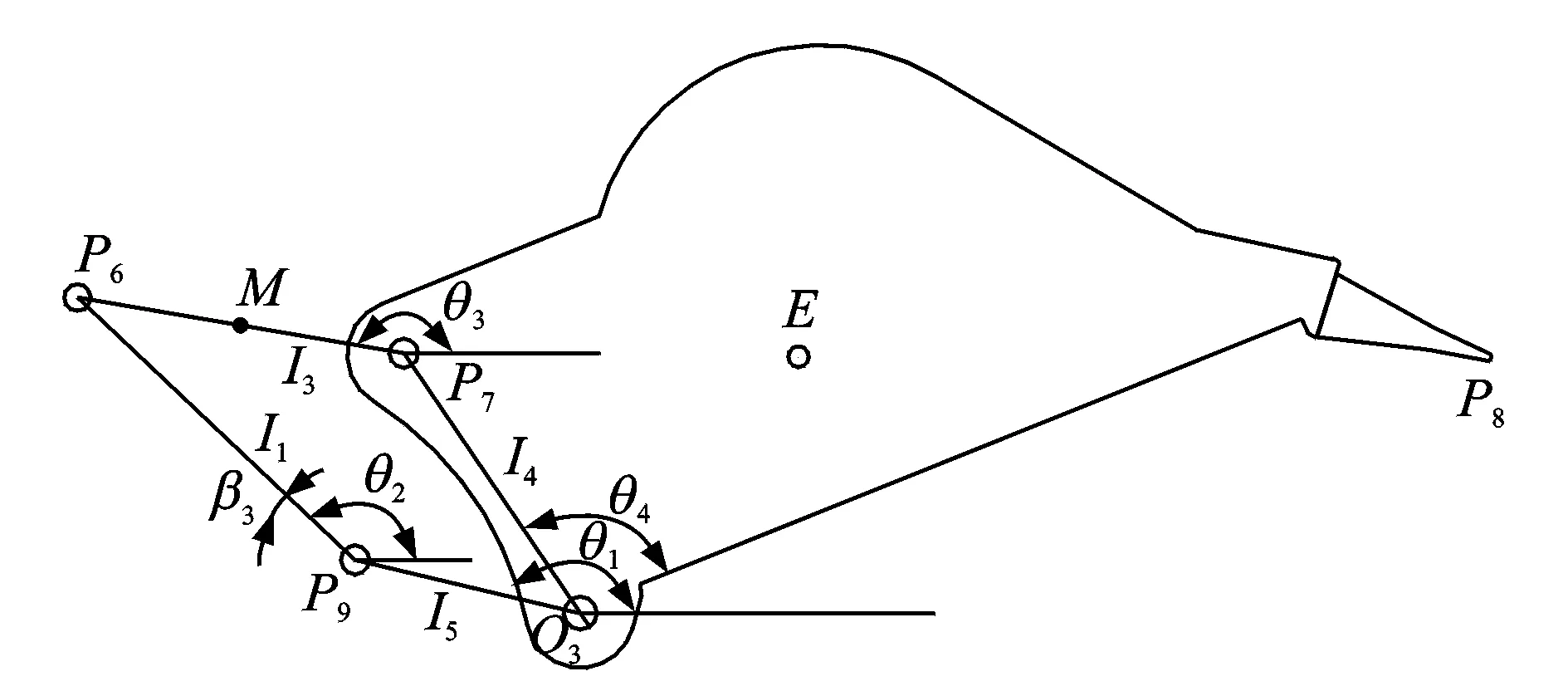
圖3 鏟斗四連桿機構運動模型Fig.3 Kinematics model of bucket′s four connecting bar
1.3 求解振動挖掘力模型

T=T0+T1+T4+T3
(19)

由式(14)可得到
(20)


(21)
化簡上式,得到
(22)
根據平衡軸定理,對于連桿P6P7,有
(23)
其中:m67為桿P6P7的質量;FM3長度的可根據幾何運算獲得。
將式(23)帶入式(22),即可得到鏟斗上系統的等效轉動慣量。利用動量矩平衡原理可求得作用于挖掘鏟斗斗齒上的振動挖掘力
(24)
其中:Mbucket為鏟斗上系統等效轉動慣量。
2 流量振動控制信號模型
設鏟斗振動挖掘時,其振動挖掘流量qV(t)與手動控制流量qS(t)之比為λ,即
(25)

當振動挖掘輸入正弦控制信號時,鏟斗油缸的位移信號為
(26)
其中:qVmax為鏟斗振動時產生的最大流量;f為液壓流量的振動頻率,單位為Hz。
容易得到其振動速度、加速度信號分別為
當振動挖掘輸入方波控制信號時,鏟斗油缸的位移信號為
(27)
其中:T為振動周期。
由于方波信號的1階、2階導數非連續,用傅里葉級數將其展開,得到
(28)
式(28)兩邊對時間t求1階和2階導數,得到輸入信號的速度、加速度信號,分別為
(29)
(30)
同理,可獲得三角波振動控制信號的位移、速度和加速度。
3 數值計算分析
以某型挖掘機為例,已知l0=1 511 mm,l1=420 mm,l3=365 mm,l4=345 mm,l5=254 mm,鏟斗質量m4=213 kg;動臂的擺動范圍為[0, 127°],斗桿擺動范圍為[0, 119°],鏟斗擺動范圍為[0, 152°];Pi(i=1,2,…,9)的局部坐標均為已知。挖掘作業裝置的初始狀態為動臂油缸伸展最大、鏟斗和斗桿油缸最短位置。
3.1 振動挖掘鏟斗斗齒的運動軌跡(包絡圖)
當動臂和斗桿確定在某一位置時(α1=35°,α2=50°),鏟斗油缸產生振動,進行振動挖掘作業,挖掘軌跡如圖4所示。在圖4中,基本上看不到振動挖掘和靜力挖掘斗齒時軌跡有什么差別,實際上,鏟斗斗齒在靜力挖掘上疊加了振動挖掘的運動。將圖4局部放大可以看出,斗齒運動是振動挖掘和靜力挖掘的疊加。圖5為局部放大視圖,部分視圖由2根或多根軌跡曲線組成,說明基于鏟斗油缸驅動的振動挖掘是在靜力挖掘的基礎上疊加了振動挖掘,其振動方向與斗齒的運動方向一致,是一種一維振動挖掘。
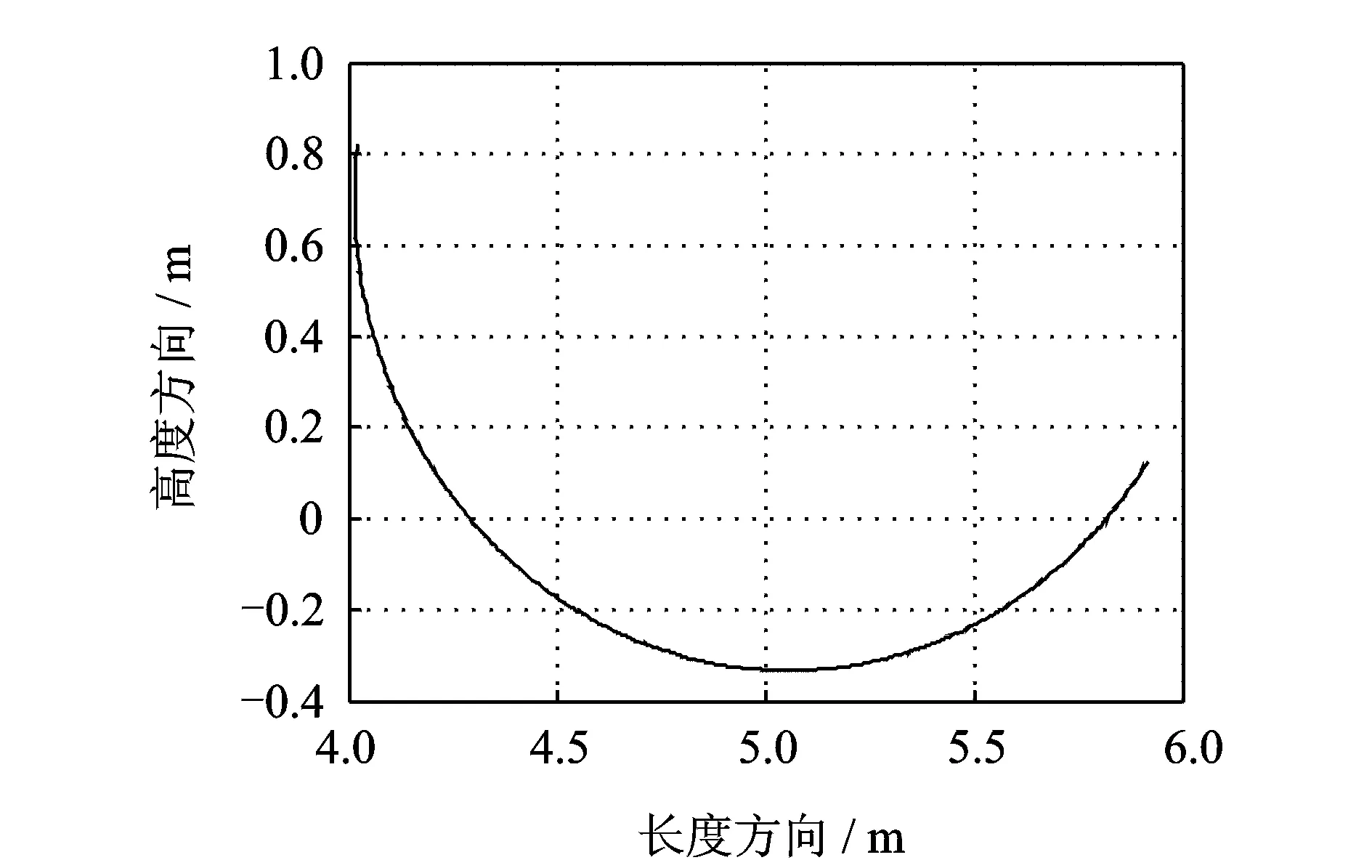
圖4 鏟斗斗齒振動挖掘軌跡Fig.4 Vibration excavating trace of bucket tooth
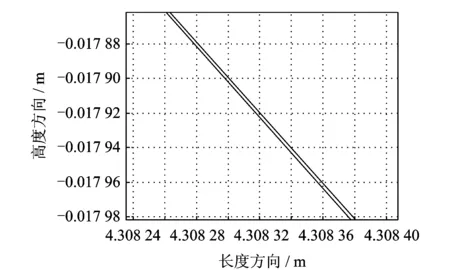
圖5 鏟斗斗齒振動挖掘軌跡局部放大視圖Fig.5 Local amplifying view for vibration excavating trace of bucket tooth
3.2 正弦、方波和三角波振動控制信號產生的振動挖掘力對比分析
振動挖掘控制信號輸入分別為正弦、方波和三角波信號,振動頻率為10 Hz,λ=0.2,動臂和斗桿位置分別為α1=35°,α2=50°,計算可得到鏟斗斗齒點的振動挖掘力,挖掘力分布分別如圖6~圖8所示。可以看出,其共同的特點是振動挖掘力的分布隨時間的變化而變化,較大的振動挖掘力出現在兩端,呈“浴盆”狀分布,正弦波輸入振動控制信號產生的最大振動挖掘力約為1.9 kN,三角波信號約為26 kN,方波產生的最大振動挖掘力約為58 kN。這是由于方波信號可以產生較大的加速值,可獲得較大的振動挖掘力;而正弦信號過渡較為平緩,加速值較小,得到的振動挖掘力值也較小;三角波振動效果位于兩者之間,這對于振動挖掘控制波形的選擇具有重要意義。
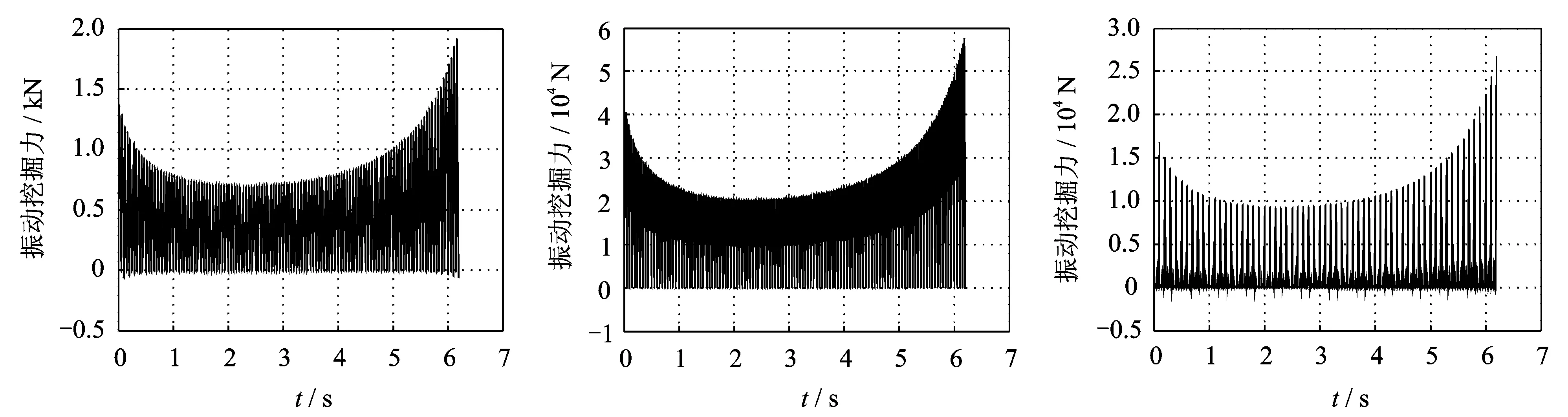
圖6 正弦輸入信號斗齒振動挖掘力 圖7 方波輸入信號斗齒振動挖掘力 圖8 三角波輸入信號斗齒振動挖掘力
Fig.6 Vibration excavating force of sine wave signal Fig.7 Vibration excavating force ofsquare wave signal Fig.8 Vibration excavating force of triangular wave signal
另外,對于用傅里葉級數表示的方波和三角波信號,通過數值分析表明,當傅里葉級數取10階以上時,級數截斷對數值分析結果影響較小。
3.3 同一輸入振動控制信號、不同振動頻率時的振動挖掘力分布情況
以三角波輸入信號為例,不同頻率的三角波信號與最大振動挖掘力分布情況如圖9所示。從圖9可以看出,隨著頻率的增加,最大振動挖掘力呈指數級增加,如振動頻率為25 Hz時,最大振動挖掘力達到600 kN。可見,對于采取流量控制方式,可以通過增加振動頻率的方式增加振動挖掘力。
3.4 同一輸入振動控制信號、不同振動流量控制比例λ時的振動挖掘力分布情況
以三角波輸入信號為例,不同振動流量控制比例λ與最大振動挖掘力分布情況如圖10所示。從圖10可以看出,隨著流量控制比例的增加,最大振動挖掘力也呈指數級增加。如振動流量控制比例λ=0.3時,最大振動挖掘力達到30 kN。可見,對于采取流量控制方式,可以通過增加振動流量控制比例的方式來增加振動挖掘力。
3.5 振動挖掘作業效率分析
從上述分析可知,在振動挖掘作業時,通過振動流量控制,將鏟斗大腔的液壓動力源分成了兩個部分,一部分用于驅動鏟斗油缸實現靜態挖掘,一部分用于振動挖掘。當λ值變大時,意味著用于振動挖掘的流量增大,而用于靜態挖掘的流量會減小,在一定條件下,油缸走完全行程的時間就會增加,其作業效率會降低。圖11為鏟斗油缸的作業時間與振動流量的關系圖。從圖11可以看出,當流量控制比例增加時,作業時間呈指數關系增加,導致作業效率下降。在實際作業中,需要根據作業對象的具體力學特征,來決定振動流量控制比例系數。在振動挖掘能夠克服挖掘阻力的情況下,應盡量減少振動流量控制比例系數,以提高振動挖掘作業效率。

圖9 不同頻率的三角波信號最大振動挖掘力分布
Fig.9 Maximum vibratory excavating force under different frequency of triangular wave signal
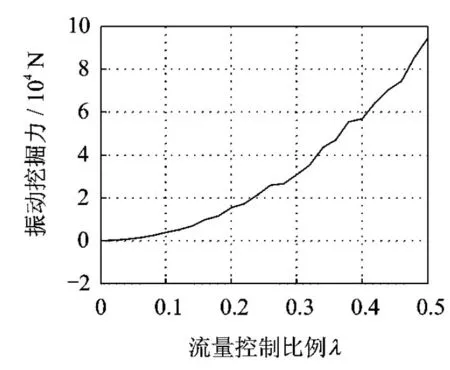
圖10 不同λ三角波信號最大振動挖掘力分布情況
Fig.10 Maximum vibratory excavating force under different λ of triangular wave signal
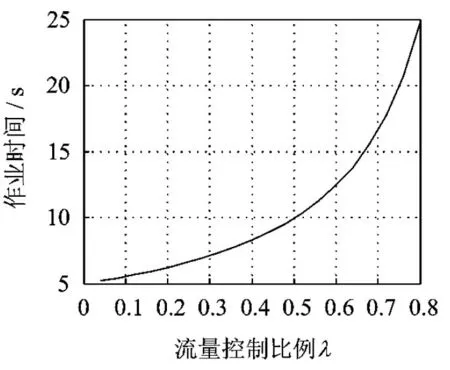
圖11 鏟斗油缸振動流量控制比例λ與作業時間關系
Fig.11 Relationship of vibratory flow control ratio λ with operation time
4 試驗驗證
為了驗證流量振動控制的數值分析結果,對液壓挖掘機樣機進行空載振動試驗。對雙閥芯控制閥分別輸入方波、三角波和正弦波信號,頻率均為10 Hz,鏟斗驅動總流量為70 L/min,振動流量控制比例為20%,同時測試雙閥芯閥(通過控制器)和鏟斗油缸大腔壓力和流量,得到的測試數據如圖12~17所示。其中:圖13,15,17分別為鏟斗在某一位置狀態下連續空載振動的測試數據;圖18為同等條件下,輸入正弦波時,計算模型得到的鏟斗在一個作業周期內大腔壓力變化情況。
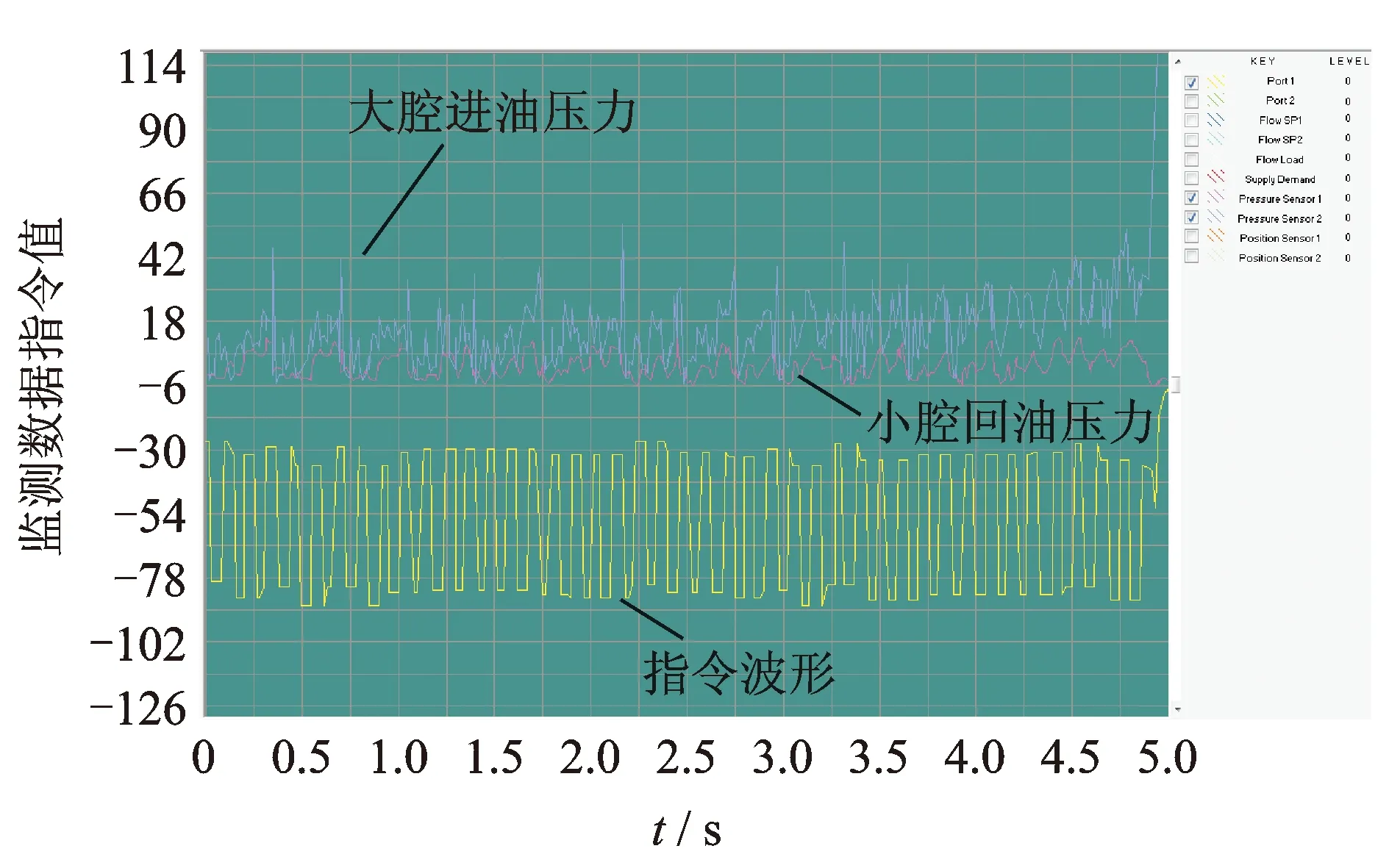
圖12 雙閥芯閥方波輸入信號監測數據Fig.12 Monitoring data of dual-spool (square wave)
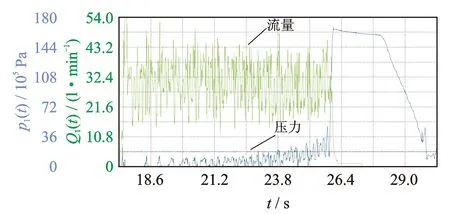
圖13 方波信號鏟斗油缸壓力和流量測試數據Fig.13 Flow and pressure measurement data of bucket cylinder (square wave)
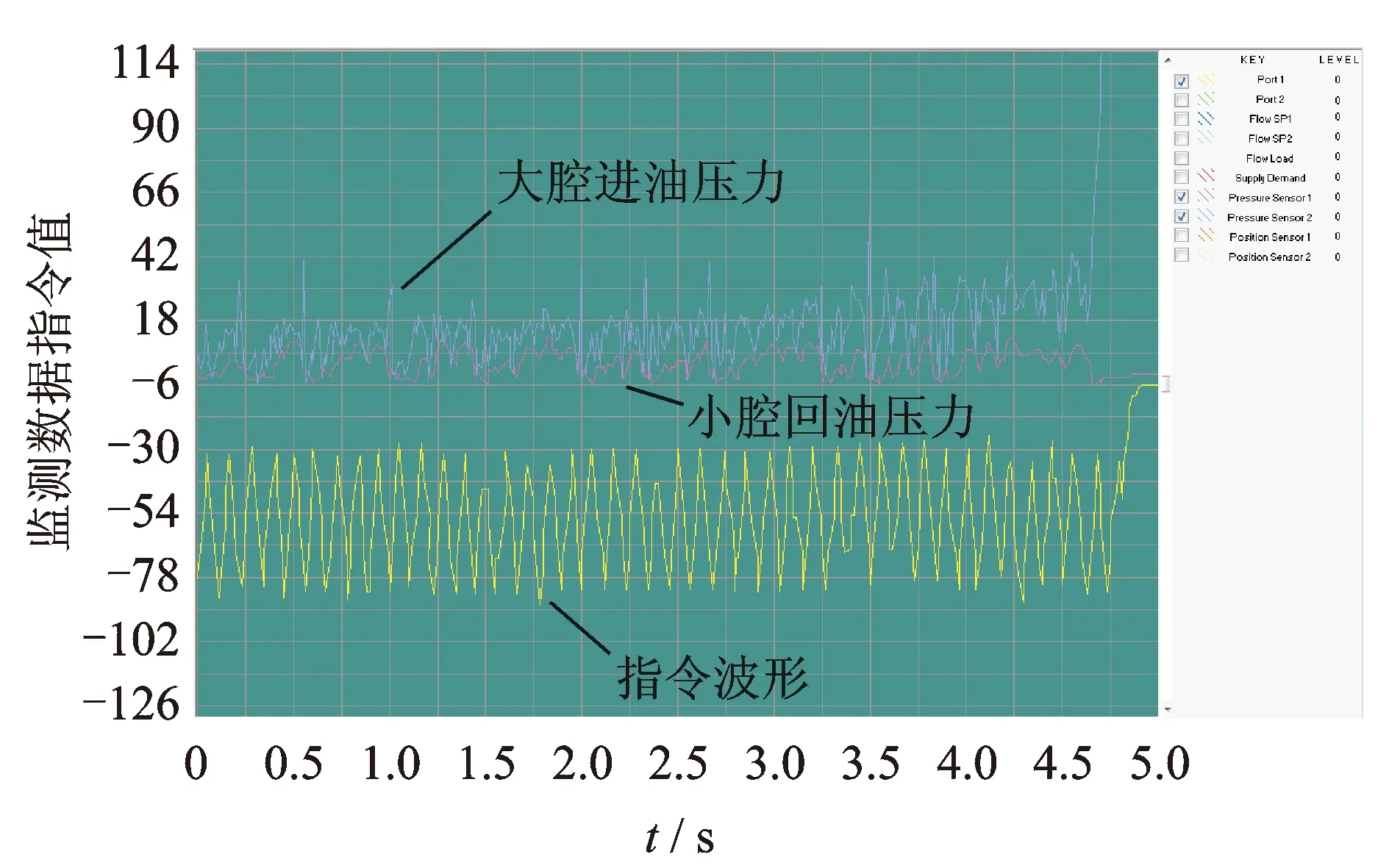
圖14 雙閥芯閥三角波輸入信號監測數據Fig.14 Monitoring data of dual-spool (triangular wave)
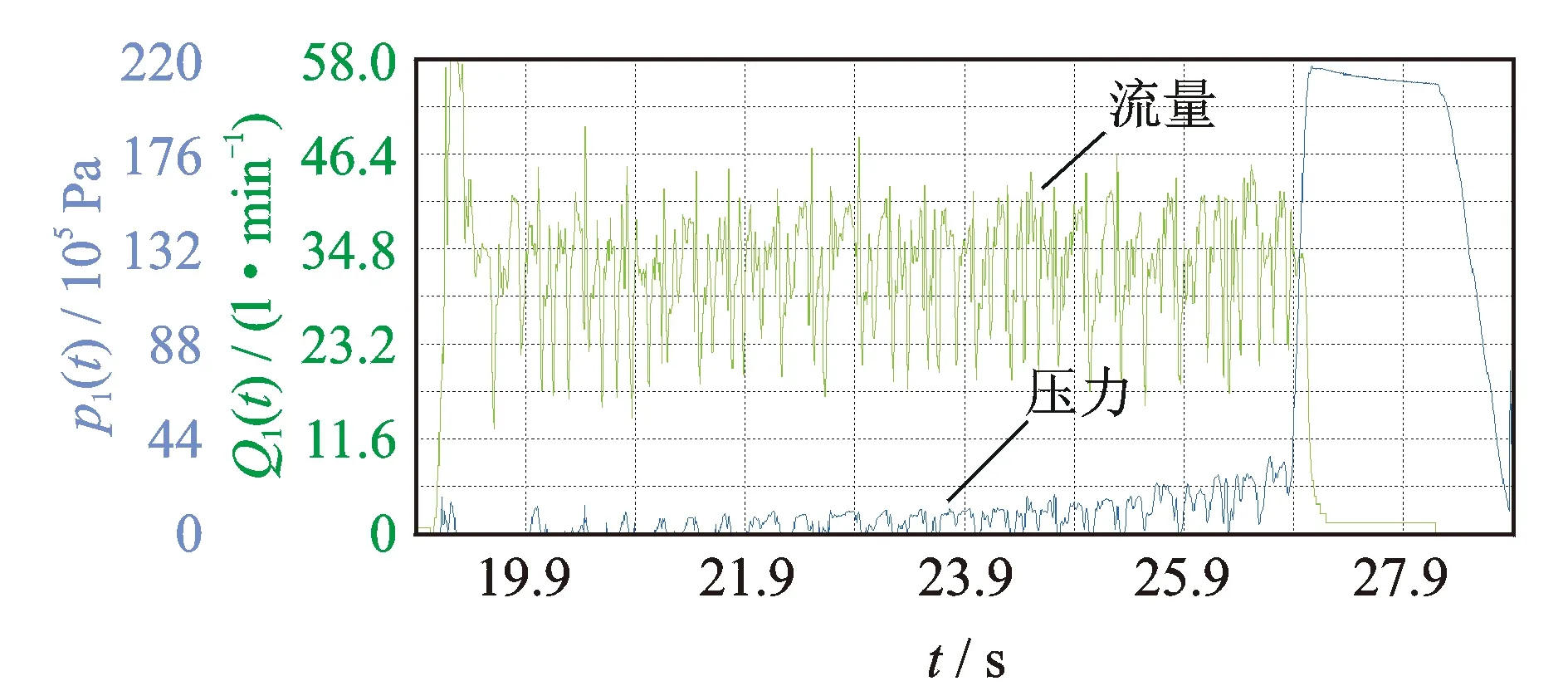
圖15 三角波信號鏟斗油缸壓力和流量測試數據Fig.15 Flow and pressure measurement data of bucket cylinder (triangular wave)
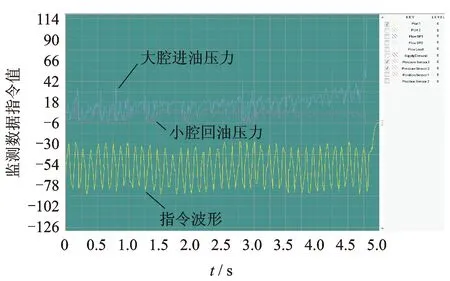
圖16 雙閥芯閥正弦波輸入信號監測數據Fig.16 Monitoring data of dual-spool (sine wave)
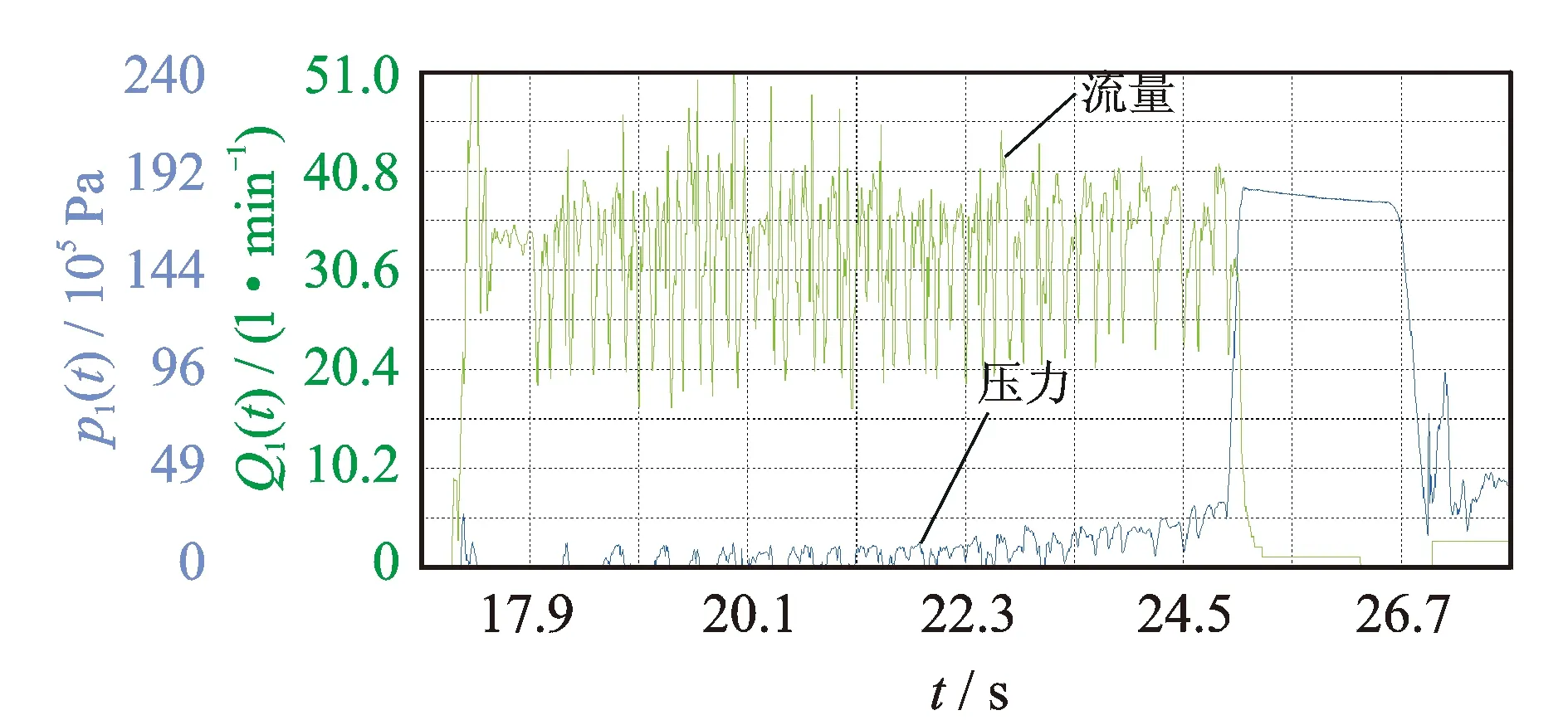
圖17 正弦波信號鏟斗油缸壓力和流量測試數據Fig.17 Flow and pressure measurement data of bucket cylinder (sine wave)

圖18 正弦、f=10 Hz,λ=0.2時鏟斗油缸大腔一個周期內壓力計算數據Fig.18 Bucket cylinder pressure in one periodic under sine wave, f=10 Hz, and λ=0.2
5 結 論
1) 用傅里葉級數表示三角波、方波振動控制信號,解決了原始信號1階、2階導數不連續的問題。
2) 基于鏟斗油缸驅動的振動挖掘,其振動方向與斗齒的運動方向一致,為一維振動挖掘。
3) 輸入方波流量振動控制信號,可獲得較大的振動挖掘力,而正弦信號的振動挖掘力最小,三角波介于兩者之間。
4) 對于流量振動控制方式,可以通過增加振動頻率、振動流量控制比例的方式,增加振動挖掘力。
5) 在振動挖掘能夠克服挖掘阻力的情況下,盡量減少振動流量控制比例系數,以提高振動挖掘作業效率。
[1] 朱建新,郭鑫,鄒湘伏,等.巖土振動掘削技術研究現狀及其發展趨勢[J], 工程機械,2006, 37(1):33-38.
ZhuJianxin,GuoXin,ZuXiangfu,etal.Researchsituationofvibratoryexcavationtechnologyforrockandsoilanditsdevelopingtrend[J].ConstructionMachineryandEquipment, 2006, 37(1): 33-38. (inChinese)
[2] 夏振遠, 陳學永. 振動挖掘機的研究綜述[J]. 機電技術, 2014(3):134-137.
XiaZhenyuan,ChenXueyong.Areviewonthestudiesofvibratoryexcavator[J].Mechanical&ElectricalTechnology, 2014(3):134-137. (inChinese)
[3]SaqibGS,WrightME.Vibratorydiggersforharvestingsweetpotatoesincloddysoils[J].JournalofAgriculturalEngineeringResearch, 1986, 34(1):53-61.
[4]NiyamapaT,SalokheVM.Laboratoryinvestigationsintosoilfailureundervibratorytillagetools[J].JournalofTerramechanics, 1993, 30(6):395-403.
[5]MuroT,TranDT.Regrssionanalysisofthecharacteristicsofvibro-cuttingbladefortuffaceousrock[J].JournalofTerramechanics, 2003, 40(3):191-219.
[6] 朱建新, 趙崇友, 郭鑫.液壓挖掘機振動掘削減阻機理研究[J]. 巖土力學, 2007, 28(8): 1605-1608.
ZhuJianxin,ZhaoChongyou,GuoXin.Researchonmechanismofvibratoryexcavationofhydraulicexcavators[J].RockandSoilMechanics, 2007, 28(8): 1605-1608. (inChinese)
[7] 朱建新. 液壓挖掘機振動掘削機理及其過程優化建模與智能控制策略研究[D]. 長沙:中南大學,2008.
[8] 朱文華. 液壓振動技術[M]. 福建:福建科學技術出版社,1983: 1-12.
[9] 李安良. 液壓多路換向閥雙閥芯控制技術的應用[J]. 工程機械,2005(2):54-56.
LiAnliang.Applicationofhydraulicmultiplexreversingvalvetwo-spoolcontroltechnology[J].ConstructionMachineryandEquipment, 2005(2):54-56. (inChinese)
[10]JohnJC. 機器人學導論[M]. 贠超,譯. 北京: 機械工業出版社, 2006: 14-40.
[11]孫桓. 機械原理[M]. 3版. 北京:人民教育出版社, 1986: 61-72.

10.16450/j.cnki.issn.1004-6801.2016.03.005
*總裝“十二五”預研資助項目(ZLY2011415)
2014-05-01;
2014-12-17
TH113.1; O311
韓軍,男,1966年8月生,研究員、博士。主要研究方向為工程機械研發、機械振動與控制等。曾發表《一種計算步行式底盤局部結構載荷的優化方法》(《機械工程學報》2007 年第43卷10期)等論文。
E-mail:hanjun1107@163.com
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
電子制作(2018年11期)2018-08-04 03:25:42
數學物理學報(2017年6期)2018-01-22 02:26:40
故事大王(2016年7期)2016-09-22 17:30:08
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
計算物理(2014年2期)2014-03-11 17:01:44
