輪胎動平衡試驗機系統偏心的動態補償*
2016-11-23 11:15:58楊靜芳馮顯英王家寅
振動、測試與診斷 2016年3期
關鍵詞:系統
楊靜芳, 馮顯英, 張 鵬, 王家寅
(1.齊魯工業大學機械與汽車工程學院 濟南,250353) (2.山東大學機械工程學院 濟南,250061)
?
輪胎動平衡試驗機系統偏心的動態補償*
楊靜芳1, 馮顯英2, 張 鵬2, 王家寅2
(1.齊魯工業大學機械與汽車工程學院 濟南,250353) (2.山東大學機械工程學院 濟南,250061)
較大的系統偏心量是影響輪胎動平衡試驗機測試精度、重復性和穩定性的一個重要因素,當前的偏心補償操作求出系統偏心量后僅用于后續解算,而鮮有將其消除或減小的結構或措施。針對此問題,基于原有的機械結構和解算原理,提出在輪輞徑向或周向開T型槽改進輪輞結構的方法,通過在T型槽內配上特定重量的T型螺栓實現對系統的真正補償。結合理論計算和實際工況進行配平操作,試驗結果表明,改進的輪輞結構和補償方法較大程度地降低了系統自身不平衡量,為獲得良好的信號源、消除信號干擾及降低系統磨損,得到更高的測試精度、穩定性和重復行提供了條件。
輪胎動平衡; 偏心補償; 動態補償; 輪輞; T型槽
引 言
輪胎動平衡試驗機是輪胎行業內高精度的檢測設備,其測試精度受諸多因素影響。不少企業、院校以及研究所對該試驗機從理論和實踐方面做了不少研究[1-9],主要影響因素包括以下幾個方面:a.機械結構的設計、加工和裝配;b.傳感器非線性、力的關聯效應等的影響[10-12];c.復雜噪音背景下信號的調理、采集、濾波、幅值相位提取等各環節以及標定算法、偏心補償算法和零校正算法[13-20]等;d.實際測試過程中,相關參數一致性和穩定性影響,如速度和壓力的實時性[21]與穩定性、上下輪輞同軸度保證、輪輞與輪胎定中心臂同軸度保證、胎圈潤滑程度、輪輞與輪胎裝配誤差以及輪輞寬度(段差)調節等。
驅動裝置、傳動系統以及主軸系的結構基本決定了系統的機械特性。良好的傳動環節是測試速度恒定的保障,但傳動過程中不可避免地會引入若干振動干擾。目前市面上的輪胎動平衡機主要采用皮帶傳動型,但實踐發現皮帶傳動通常存在倍頻信號干擾[22-23]。德國申克公司提出皮帶浮動驅動裝置,將皮帶的單側傳動改為兩側傳動。北京航空制造工程研究所625所為消除皮帶干擾采用摩擦輪驅動,測試過程中摩擦輪脫開主軸,并加以速度補償算法輔助的方式進行檢測,但離心力對速度高度敏感。另外,設備長期運行對主軸機構配合精度也存在影響,主軸安裝時要求全跳動不大于0.05,長期運行之后較難保證。系統自身偏心量的大小也決定了系統的檢測精度[24]。系統自身偏心量大時,會引入較大的振動和噪聲,使信噪比惡化,振動信號受到串擾,加劇主軸和軸承等關鍵結構的磨損,造成系統的不穩定,增加量標定次數,降低測試精度和效率。當待測輪胎的不平衡量較大時,易造成傳感器的過載甚至損壞;當待測輪胎的不平衡量較小時,振動信號可能出現拍頻現象,甚至畸形。所以,穩定且偏心量較小的測控系統是獲得較高測試精度的基礎和保障。當前的輪胎動平衡試驗機大多不具備消除或減小系統自身偏心的裝置或結構,試驗機一旦安裝完成,很少對系統自身的不平衡量加以配平,主要依靠安裝過程中對關鍵部件單獨動平衡來控制系統自身的不平衡量,而這種方法效果甚微。行業內輪胎動平衡試驗機的偏心補償操作,旨在每次測量解算時減去該偏心補償結果以得到輪胎單獨的不平衡量,并不具備真正補償或配平系統偏心量的功能。文獻[25]提出在旋轉套筒上添加鉛塊的方法配平系統不平衡量。通過套筒的周向旋轉可以滿足任意角度配平的要求,但徑向任意位置卻實現不了。
綜上所述,筆者基于現有的量標定和偏心補償操作與算法,改進輪輞結構,改善偏心補償操作流程,實現對系統自身不平衡量的真正補償。
1 輪胎動平衡試驗機的偏心量計算
每次的測量結果均包括了系統自身不平衡量和輪胎不平衡量兩部分。求出試驗機本身的不平衡量,并從測量結果中將其減掉,才能獲得輪胎單獨的不平衡量。知曉系統本身的偏心量,也是對系統進行配平的前提,可通過偏心補償過程求解。偏心補償主要是采用基2的整次冪反向消除法測量偶數次得到試驗機自身的不平衡量。本試驗系統中,偏心補償過程共測量4次,則計算過程可表示為
(1)
(2)
(3)
(4)

系統自身不平衡量為
(5)
2 系統偏心的動態補償
2.1 動態補償輪輞的設計
基于原有的機械結構和輪輞尺寸,改進并得到了兩種不同結構的輪輞。結合控制策略和補償方法,可實現系統偏心量的動態補償。圖1所示的輪輞為正交式T型槽輪輞,在輪輞的正交方向上開4個T型槽,并配以特定尺寸的T型螺栓,T型螺栓作為配重,可在T型槽內移動并固定。圖2所示的輪輞為環狀T型槽輪輞,沿輪輞圓周方向開T型槽,同樣配以槽內可移動的配套的T型螺栓。
輪輞層上均布的4個螺紋孔用于量標定過程中加載試重(砝碼)。為了便于計算和信號處理,將砝碼所在位置記為測試的0°位置,且就此建立坐標系xOy,如圖3所示。理論上講,輪輞層上任意位置均可設置正交的T型槽,而實際操作時,為了防止標定砝碼和配重T型螺栓所在位置相干涉,使T型槽與xOy坐標軸有一定夾角γ。同時,在輪輞T型槽所在的正交方向構建坐標系x′Oy′。筆者開發的測試系統中,主軸呈順時針方向旋轉。圖2中的環狀T型槽輪輞則不需另設坐標系,且T型槽位置只需在輪輞直徑方向避開量標定砝碼加載孔即可。
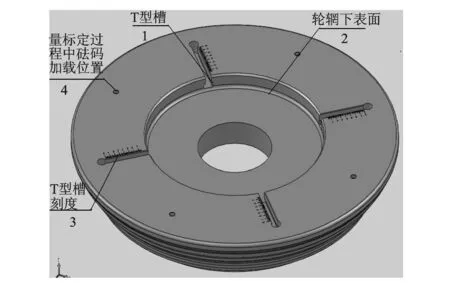
圖1 正交式T型槽輪輞Fig.1 Orthogonal T groove rim
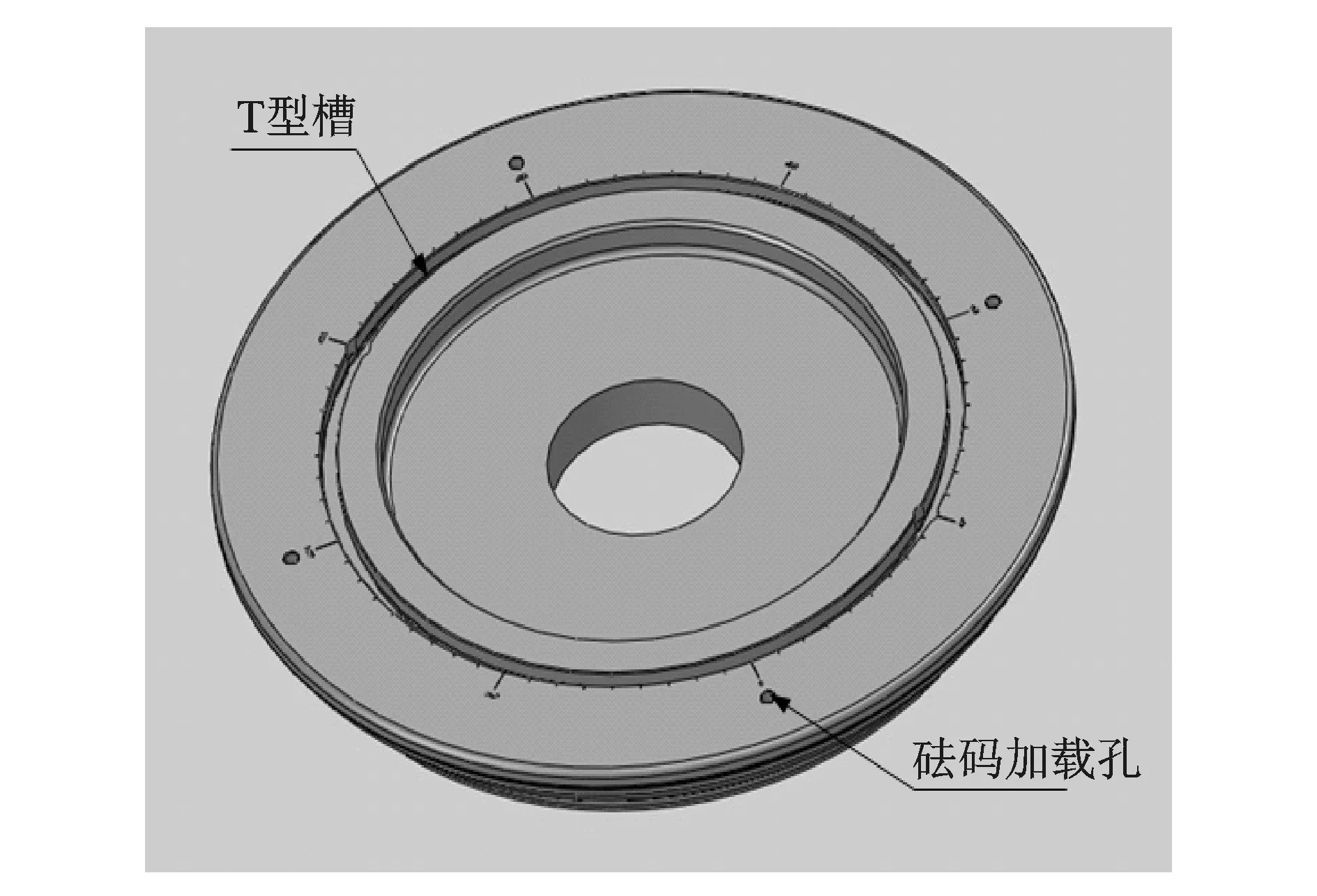
圖2 環狀T型槽輪輞Fig.2 Ring T groove rim
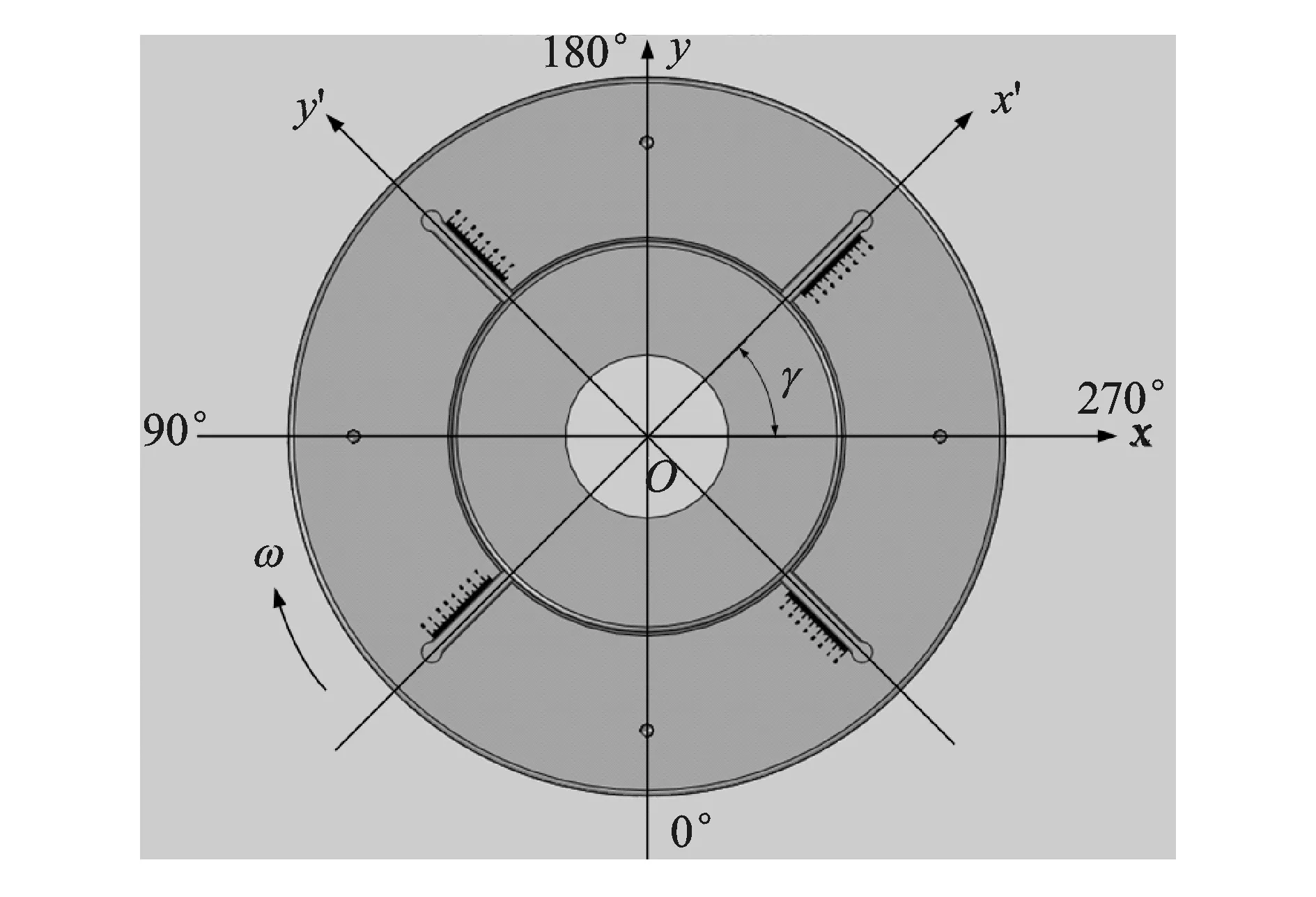
圖3 坐標系分布圖Fig.3 Coordinate distribution
2.2 系統不平衡量的動態補償策略
設計算所得的系統自身上不平衡量為Mu(g),角度為θ(°);下不平衡量為Md(g),角度為α(°)。由于解算所得的角度是系統不平衡量所在的重點位置,而實現配重功能的T型螺栓應該加在不平衡量的輕點位置,所以,設上下輪輞T型螺栓的加載位置為θ′和α′。當θ<180時,θ′=180+θ;當θ>180時,θ′=θ-180;α亦然。θ,α,θ′和α′都在xOy的測試坐標系內。
2.2.1 正交式T型槽輪輞配重策略
1) 測試坐標系與補償坐標系重合。
當兩坐標系夾角γ=0時,即測試坐標系xOy與補償坐標系x′Oy′重合,則輪輞T型槽上應加的T型螺栓重量和位置為
(6a)
(6b)
(7a)
(7b)
其中:Mux和Muy分別為上輪輞x′軸和y′軸上應配平的T型螺栓的重量;Mdx和Mdy分別為下輪輞x′軸和y′軸上應配平的T型螺栓的重量;Lux和Luy分別為上輪輞T型槽內加載T型螺栓的位置;Ldx和Ldy分別為下輪輞T型槽內加載T型螺栓的位置;R為輪輞校正半徑。
式(6)和式(7)均只討論配平螺栓的大小,配平位置取Mu和Md所在象限相鄰的T型槽即可。
2) 測試坐標系與補償坐標系不重合。
當兩坐標系夾角γ≠0時,即測試坐標系xOy與補償坐標系x′Oy′不重合,則輪輞T型槽上應加的T型螺栓重量和位置為
(8a)
(8b)
(9a)
(9b)
本試驗系統中取γ=45°。
采用正交式T型槽輪輞配平,可以把較大的配重分解成一對較小的配重加載到T型槽內,但是配重塊的徑向調整位置在某些機型下受輪輞結構限制。例如,圖4所示載重輪胎使用的規格為R24.5-22.5-20的三級輪輞,為減輕輪輞重量和縮短上輪輞芯軸長度,輪輞中心通常使用下沉且挖空的結構形式。輪輞外直徑為660 mm,內直徑為400 mm,內直徑以內均被掏空一定深度,且在輪輞中心開?150 mm的孔用于與輪輞芯軸裝配。出于安全考慮,T型槽外端與輪輞外緣預留10 mm。所以,該結構下正交式T型槽輪輞徑向有效調整范圍僅在200~320 mm內,很大程度上受到限制。但對于轎車輪胎或輕卡輪胎等較小或者較輕的輪輞,由于輪輞中心不掏空,所受限制較小,可以使用。
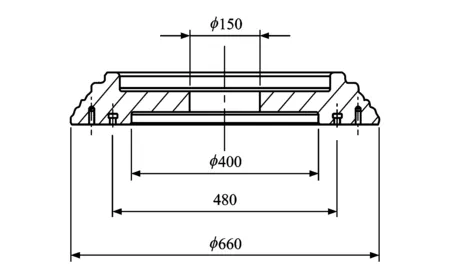
圖4 輪輞尺寸示意圖(單位:mm)Fig.4 The size diagram of the rim (unit: mm)
2.2.2 環狀T型槽輪輞配重策略
采用環狀T型槽輪輞不受輪輞直徑影響,但是當系統偏心量較大時,配重也無法分解減小。另外,由于量標定過程中的校正半徑和配平時的T型槽半徑不同,所以需要將系統偏心量進行等效。
根據力矩平衡原理,有MR=M′R′,所以
(10)
其中:Mu為偏心補償求出的系統不平衡量;Mu′為配重所用的T型螺栓重量;R為校正半徑;R′為T型槽半徑。
2.3 系統偏心動態補償方法
根據不加配重時量標定和偏心補償操作計算所得的Mux,Muy,Mdx,Mdy和Lux,Luy,Ldx,Ldy,在輪輞T型槽中調整T型螺栓的位置加以配平。配平后重新進行量標定和偏心補償操作,得出配平后新的系統偏心量。如果理想即可停止配平,倘若系統偏心量依舊較大則可以重復以上過程,直至系統偏心降至可接受的理想范圍為止。操作流程如圖5所示,整個過程將得到越來越精確的標定系數和系統偏心量。
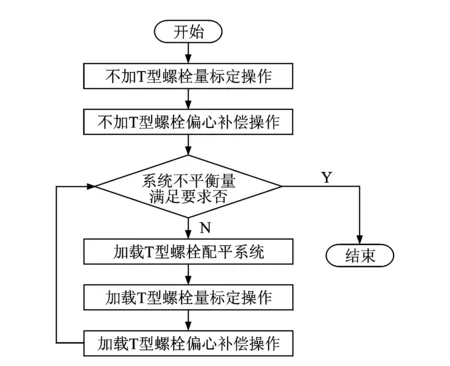
圖5 動態配平操作流程Fig.5 Dynamic balancing operation process
3 試驗結果對比分析
3.1 試驗流程
3.1.1 正交式T型槽輪輞配平
使用規格為R24.5′-22.5′-20′的正交式T型槽輪輞,帶上規格為295/80R22.5DSR266的輪胎進行偏心補償操作。得到系統上下偏心量和角度為:上偏心量186.49 g(185.42°);下偏心量265.65 g(312.78°)。由于T型螺栓應加載在系統不平衡量輕點上,故有
(11)
加載重量和位置計算如下
(12)
(13)
應在系統不平衡量輕點位置相鄰的兩T型槽,即-x′和-y′坐標系所在的T型槽內加載T型螺栓配平。在-x′槽的208 mm處加載132.83 g,-y′槽的 172.03 mm處加載130.90 g。但由于正交式T型槽輪輞徑向有效調整范圍為200~320 mm,所以172.03 mm實際操作受限。
此時,有以下調整方法:a.在-y′槽200 mm處加載130.90 g,之后重新標定和補償,再次計算系統的偏心量,再次配平,直到系統偏心量降到理想范圍;b.融合兩種輪輞的配平方法,先按照環狀T型槽輪輞等效方法,將系統自身偏心量從校正半徑270 mm上等效到T型槽輪輞外端所在的圓周半徑320 mm上,之后再采用正交T型槽輪輞配平方法進行分解后補償。筆者采用第2種方法,故有
(14)

(15)
(16)
所以在-x′槽的246.66 mm處加載127.28 g,-y′槽的203.89 mm處加載100.26 g。
同理,對下輪輞進行配平操作,有以下幾種方法:a.在-x′槽的10.46 mm處加載10.29 g,y′槽的269.80 mm處加載265.45 g; b.在-x′槽的8.58 mm處加載12.40 g,y′槽的319.76 mm處加載12.40 g。
3.1.2 環狀T型槽輪輞配平
采用規格為R24.5′-22.5′-20′的環狀T型槽輪輞帶上3.1.1節中的輪胎進行偏心補償操作,得到系統不平衡量為:上不平衡量178.95 g(190.33°);下不平衡量271.54 g(295.98°)。故有

(17)
(18)
所以應該在上輪輞10.33 °處的T型槽內加150.99 g的螺栓,在下輪輞115.98 °處的T型槽內加229.11 g的螺栓。
分別使用正交式T型槽輪輞和環狀T型槽輪輞對系統進行初次偏心測量,得出的系統自身不平衡量略有差別。這是因為系統自身的偏心量依賴于每一個組成部件,且不同輪輞的殘余不平衡量不盡相同,所以一旦更換輪輞,系統偏心量會發生變化。此時,需要重新測量系統的不平衡量及重新補償。
3.2 試驗結果
分別使用不同的配平輪輞進行補償后,得到配平前后系統偏心量對比結果如表1所示。補償操作后,環狀T型槽結構得到的系統偏心量較小,較正交式T型槽輪輞理想。
實際配平后仍殘留系統偏心量,主要是因為實際的T型螺栓重量與理論要求的配重不完全一致,實際加載T型螺栓的位置與理論計算值有差異,偏心補償操作本身存在測量誤差等。但是,配重前后系統的偏心量已經降低至允許范圍。

表1 配平前后系統偏心量對比結果
4 結 論
1) 引入改進后的輪輞結構和方法對系統進行配平補償,能夠將系統自身的不平衡量減小至理想范圍。由于配平過程中T型螺栓的重量和加載位置以及測試誤差等因素存在,系統偏心可能無法徹底去除。
2) 正交T型槽輪輞和環狀T型槽輪輞都能起到配平效果,但考慮輪輞的實際工況,由于尺寸和結構限制,使用環狀T型槽輪輞比較容易操作和實現。
3) 在實際工程中引入以上結構的輪輞,可以實現對系統自身不平衡量的真正補償。對長期運行偏心量發生變化的系統也適用,起配重功能的T型螺栓可動態調整。
4) 減小系統自身的不平衡量,為獲得較高的測試精度、穩定性和重復性奠定了基礎。
[1] Lee H. Vehicle wheel and tire balance testing machine: US, 4193305[P]. 1980-03-18.
[2] David P, Richard L D, David P K, et al. Lateral load tire testing system: US, 7140242 B1[P]. 2006-11-28.
[3] Sigeru M, Kazuaki L. Apparatus for measuring uniformity and/or dynamic balance of tire: US, 6131455[P]. 2000-10-17.
[4] Jean E, Eric S, Jean-Marc B. Apparatus and method for measuring tire balance on a force variation machine: US, 6772626 B1[P]. 2004-08-10.
[5] Thomas D W, Steve H, Ronald J H, et al. Tire balancing apparatus: US, 7448267 B2[P]. 2008-11-11.
[6] 姜超浪. 全自動充氣式輪胎動平衡試驗機測控系統的開發[J]. 計算機測量與控制,2004, 12(6): 532-536.
Jang Chaolang. Development of tyre dymamic balance measuring machine [J]. Computer Measurement & Control, 2004, 12(6): 532-536. (in Chinese)
[7] 都強,杭柏林. 輪胎動平衡試驗機及其控制系統[J]. 橡膠工業,2006,53(1): 41-45.
Du Qiang, Hang Bolin. The tire dynamic balanc test machine and the control system[J]. Rubber Industry, 2006,53(1): 41-45. (in Chinese)
[8] 劉迎澍,尹建華,巫上清.基于復影響系數的載重輪胎動平衡機標定算法[J].天津大學學報:自然科學與工程技術版,2013(6):565-570.
Liu Yingshu, Yin Jianhua, Wu Shangqing. Complex influence coefficients based calibration algorithm of tire dynamic balanc testing machine[J]. Journal of Tianjin University: Science and Technology, 2013(6):565-570. (in Chinese)
[9] 楊靜芳. 基于PLC的載重輪胎質量在線檢測系統的研究與開發[D]. 濟南:山東大學,2008.
[10]蓋曉晶,趙繼印,鄭蕊蕊,等.輪胎三分力測量系統的研究[J].儀表技術與傳感器,2006(8):48-49.
Gai Xiaojing, Zhao Jiyin, Zheng Ruirui, et al. Study on tyre tri-component force measure sytem[J]. Instrument Technique and Sensor, 2006(8):48-49. (in Chinese)
[11]黃勝全. 加重面數大于測點數的轉子平衡方法的研究[J].東北電力學院學報,2003,23(4):63-64,74.
Huang Shengquan. Study on the balance of rotors on the number of ading the weight side large than that of measure sites[J]. Journal of Northeast China Institute of Electric Power Engineering, 2003,23(4):63-64,74. (in Chinese)
[12]王曉升. 測量點對轉子動平衡影響的研究[J]. 西安交通大學學報, 1998,32(7): 85-89.
Wang Xiaosheng. Analysis of rotor balancing behavior as influrnsed by locations of data measurements[J]. Journal of Xi′an Jiaotong University, 1998, 32(7): 85-89. (in Chinese)
[13]牟世剛,馮顯英,晏志文,等. 基于小波分析的動平衡機不平衡量提取方法研究[J]. 山東大學學報:工學版,2011, 41(3):61-66.
Mu Shigang, Feng Xianying, Yan Zhiwen,et al. Study on unbalanced signal extraction from a dynamic balancing machine based on wavelet analysis [J]. Journal of Shandong University: Engineering Science, 2011, 41(3): 61-66. (in Chinese)
[14]都強,杭柏林. 最小二乘法在多傳感器測量標定中的應用[J]. 傳感技術學報,2005, 18(2): 244-246.
Du Qiang, Hang Bolin. Application of least squares in multisensor measure specifying [J]. Chinese Journal of Sensors and Actuctors, 2005, 18(2): 244-246. (in Chinese)
[15]Yang Jingfang, Feng Xianying, Fu Hongjun, et al. Research on calibration method of tire dynamic balance detection system[J]. Advanced Materials Research, 2012(542/543): 838-842.
[16]紀躍波. 弱非平穩轉速下轉子動平衡方法[J]. 振動、測試與診斷,2012,32(4):596-601.
Ji Yuebo. Dynamic balancing of the rotor with weakly non-stationary rotational speed[J]. Journal of Vibration, Measurement & Diagnosis,2012,32(4):596-601. (in Chinese)
[17]李傳江,費敏銳,張自強. 高精度動平衡測量中不平衡信號提取方法研究[J]. 振動與沖擊,2012,31(14):124-127.
Li Chuanjiang, Fei Minrui, Zhang Ziqiang. Method of unbalance signal extraction in high precision dynamic balancing measurement[J]. Journal of Vibration and Shock, 2012,31(14):124-127. (in Chinese)
[18]楊世錫, 梁文軍,于保華.振動信號多通道同步整周期數據采集卡設計[J].振動、測試與診斷,2013,33(1):23-28.
Yang Shixi, Liang Wenjun, Yu Baohua. Design of vibration signal′s multi-channel integer period synchronous acquisition card[J].Journal of Vibration, Measurement & Diagnosis, 2013,33(1):23-28. (in Chinese)
[19]Pilkey W D, Bailer J, Smith P D. A computational technique for optimizing correction weights and axial location of balance planes of rotating shafts[J]. Journal of Vibration, Acoustics, Stress, and Reliability in Design, 1983, 105:90-93.
[20]萬莉莉,張自強,李傳江. 基于遺傳算法的動平衡最小二乘影響系數法的優化[J]. 機械與電子,2010(4):21-24.
Wan lili, Zhang Ziqiang, Li Chuanjiang. Optimization of least squre influence coefficient method based on genetic algorithm of rotor dynamic balance[J]. Machinery & Electronics, 2010(4):21-24. (in Chinese)
[21]杭柏林,高國威,蔣珍,等.輪胎動平衡試驗機力多變量測量方法與同步邏輯的開發[J].石油化工設備,2011,40(4):28-31.
Hang Bolin, Gao Guowei, Jiang Zhen, et al. Multi-variable measuring meathod and development of synchronous logical for the tyres dynamic balance instrumentaion[J]. Petro-Chemical Equipment, 2011,40(4):28-31. (in Chinese)
[22]王漢英.平衡機帶傳動的干擾振動分析[J]. 試驗機與材料實驗,1985,4:18-23.
Wang Hanying. The interference vibration analysis of the belt drive on balancing machine[J]. The Machine and Material Test, 1985, 4:18-23. (in Chinese)
[23]Yang Jingfang, Feng Xianying, Zhao Lianfang, et al. Influences of belt drive on the rotor balance detection system[ J]. Journal of Convergence Information Technology, 2012, 7: 672-679.
[24]毛偉杰. 動平衡機輸出軸與實驗部件之間偏心量對動平衡試驗的影響[J]. 工程設計與建設, 2005,37(1):26-28.
Mao Weijie. Effect of eccentricity between output shaft of dynamic balancing machine and parts to the tested on dynamic balancing results[J]. Engineering Design and Construction, 2005,37(1):26-28. (in Chinese)
[25]劉均,林鋼. 輪胎動平衡測量中的主軸不平衡量測量方法及輪胎平衡機:中國,102072797 A[P]. 2011-05-15.

10.16450/j.cnki.issn.1004-6801.2016.03.014
*山東大學研究生自主創新專項基金資助項目(yzc12124)
2014-04-29;
2014-05-22
TH6
楊靜芳,女,1985年10月生,博士生。主要研究方向為智能檢測與數控技術。曾發表《Influences of belt drive on the rotor balance detection system》(《Journal of Convergence Information Technology》2012,Vol.7,No.3)等論文。
E-mail: longzhiyang @126.com
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
