基于T-S模糊神經(jīng)網(wǎng)絡(luò)的AGV軌跡跟蹤研究
2016-11-22 06:18:29陳薇程航鄭濤
化工自動(dòng)化及儀表 2016年4期
關(guān)鍵詞:模型
陳 薇 程 航 鄭 濤
(合肥工業(yè)大學(xué)電氣與自動(dòng)化工程學(xué)院,合肥 230009)
基于T-S模糊神經(jīng)網(wǎng)絡(luò)的AGV軌跡跟蹤研究
陳 薇 程 航 鄭 濤
(合肥工業(yè)大學(xué)電氣與自動(dòng)化工程學(xué)院,合肥 230009)
針對(duì)AGV在軌跡跟蹤過(guò)程中出現(xiàn)的問(wèn)題,通過(guò)對(duì)小車運(yùn)動(dòng)學(xué)模型進(jìn)行分析,采用T-S模糊神經(jīng)網(wǎng)絡(luò)模型,設(shè)計(jì)了一種模糊神經(jīng)網(wǎng)絡(luò)控制器,利用Matlab軟件進(jìn)行仿真,并與普通PID控制器進(jìn)行對(duì)比。仿真結(jié)果表明:基于T-S的模糊神經(jīng)網(wǎng)絡(luò)控制器提高了AGV小車運(yùn)行的穩(wěn)定性和魯棒性,優(yōu)于普通控制算法。
T-S模糊神經(jīng)網(wǎng)絡(luò) AGV 軌跡跟蹤 Matlab
自動(dòng)導(dǎo)引小車(AGV)軌跡跟蹤的目的是讓AGV沿著已經(jīng)規(guī)劃好的路徑進(jìn)行精確跟蹤運(yùn)行[1]。而在實(shí)際運(yùn)行過(guò)程中,由于AGV運(yùn)行環(huán)境的不可預(yù)知性和小車本身動(dòng)力學(xué)的較高復(fù)雜性,因此很難精確地控制AGV的軌跡跟蹤。常用的控制方法(如PID控制算法)容易出現(xiàn)小車跟蹤誤差較大、運(yùn)行不穩(wěn)定等情況。針對(duì)這些問(wèn)題,筆者采用模糊神經(jīng)網(wǎng)絡(luò)控制算法,通過(guò)設(shè)計(jì)模糊神經(jīng)網(wǎng)絡(luò)控制器來(lái)實(shí)現(xiàn)AGV小車路徑的精確跟蹤控制。
1 AGV運(yùn)動(dòng)學(xué)模型①
筆者研究?jī)奢嗱?qū)動(dòng)AGV,小車的驅(qū)動(dòng)輪分別由一臺(tái)直流伺服電機(jī)單獨(dú)進(jìn)行驅(qū)動(dòng)[2]。圖1所示為AGV在絕對(duì)坐標(biāo)系中的運(yùn)動(dòng)學(xué)模型。圖中D為驅(qū)動(dòng)輪直徑,L為AGV左右輪之間的距離,v為車體幾何中心的線速度,ωL、ωR、ω分別為左輪、右輪和車體轉(zhuǎn)動(dòng)的角速度[3]。左右輪的運(yùn)動(dòng)學(xué)方程分別為(變量上的點(diǎn)表示對(duì)變量進(jìn)行微分):
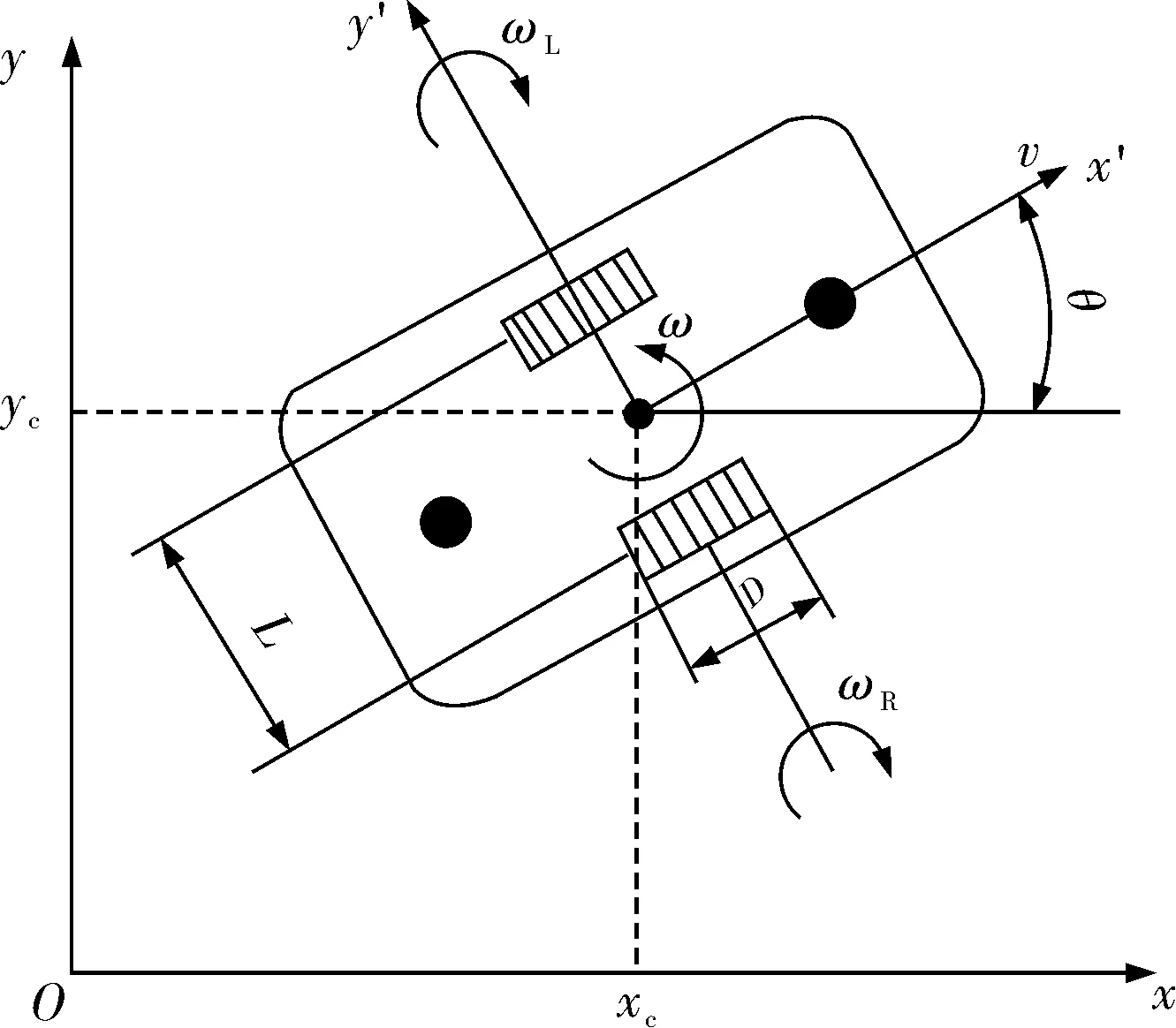
圖1 AGV運(yùn)動(dòng)學(xué)模型
式中vL、vR——左輪、右輪的線速度。
AGV車體轉(zhuǎn)動(dòng)的角速度為:
AGV車體幾何中心的線速度為:
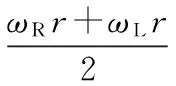
驅(qū)動(dòng)輪半徑為:

通過(guò)分析可以看出,小車不同位置狀態(tài)的變化是可以通過(guò)控制小車車體角速度ω和線速度v來(lái)實(shí)現(xiàn)的[4]。
1.1T-S模糊神經(jīng)網(wǎng)絡(luò)
Takagi-Sugeno(T-S)模糊邏輯系統(tǒng)是Takagi和Sugeno于1985年提出的,它是復(fù)雜非線性系統(tǒng)模糊建模中一種經(jīng)典的模糊動(dòng)態(tài)模型[5]。基于T-S模糊邏輯系統(tǒng)和神經(jīng)網(wǎng)絡(luò)的融合,得到了一種結(jié)構(gòu)簡(jiǎn)單的T-S模糊神經(jīng)網(wǎng)絡(luò)。T-S模糊神經(jīng)網(wǎng)絡(luò)為普通的模糊神經(jīng)網(wǎng)絡(luò),共有4層,分別為輸入層、模糊化層、規(guī)則計(jì)算層和輸出層[6],如圖2所示。
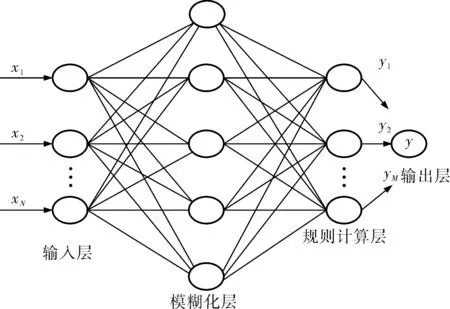
圖2 模糊神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)
第一層為輸入層。每個(gè)節(jié)點(diǎn)均與輸入向量xi相連。
第二層為模糊化層。筆者采用高斯函數(shù)作為T-S模糊神經(jīng)網(wǎng)絡(luò)的隸屬度函數(shù),所采用的隸屬度函數(shù)為:



1.2T-S模糊神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)算法
梯度下降法在普通神經(jīng)網(wǎng)絡(luò)訓(xùn)練中被廣泛使用,所以也常被應(yīng)用到此類模糊神經(jīng)網(wǎng)絡(luò)的參數(shù)調(diào)整過(guò)程中。筆者同樣也采用梯度下降法。T-S模糊神經(jīng)網(wǎng)絡(luò)的學(xué)習(xí)算法如下:


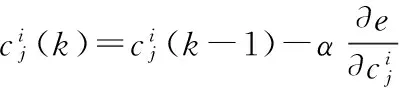

e——實(shí)際輸出和期望輸出的誤差;

xj——網(wǎng)絡(luò)輸出參數(shù);
yc——網(wǎng)絡(luò)實(shí)際輸出;
yd——網(wǎng)絡(luò)期望輸;
α——網(wǎng)絡(luò)學(xué)習(xí)率。
2 仿真分析
在Matlab的Simulink環(huán)境下,設(shè)計(jì)T-S模糊神經(jīng)控制器,對(duì)AGV小車的軌跡跟蹤問(wèn)題進(jìn)行仿真,并與單純的PID控制器進(jìn)行比較。仿真目標(biāo)對(duì)象AGV小車的角速度設(shè)定為0.5rad/s,線速度設(shè)定為1m/s;當(dāng)選擇跟蹤正弦曲線y=sinx時(shí),起始位置狀態(tài)(x,y,α)=(-5.00,0.25,0),起始位置偏差[e1,e2,e3]=[2.60,2.30,1.62],選擇設(shè)計(jì)參數(shù)k1=2、k2=4、k3=3、k=4。
首先選用RBF-PD控制器進(jìn)行訓(xùn)練,根據(jù)實(shí)際使用經(jīng)驗(yàn),初始參數(shù)設(shè)為P=150,D=150,得到如圖3所示的軌跡跟蹤曲線。同時(shí),根據(jù)上述設(shè)定參數(shù),選用T-S模糊神經(jīng)網(wǎng)絡(luò)算法進(jìn)行訓(xùn)練,得到如圖4所示的軌跡跟蹤曲線。
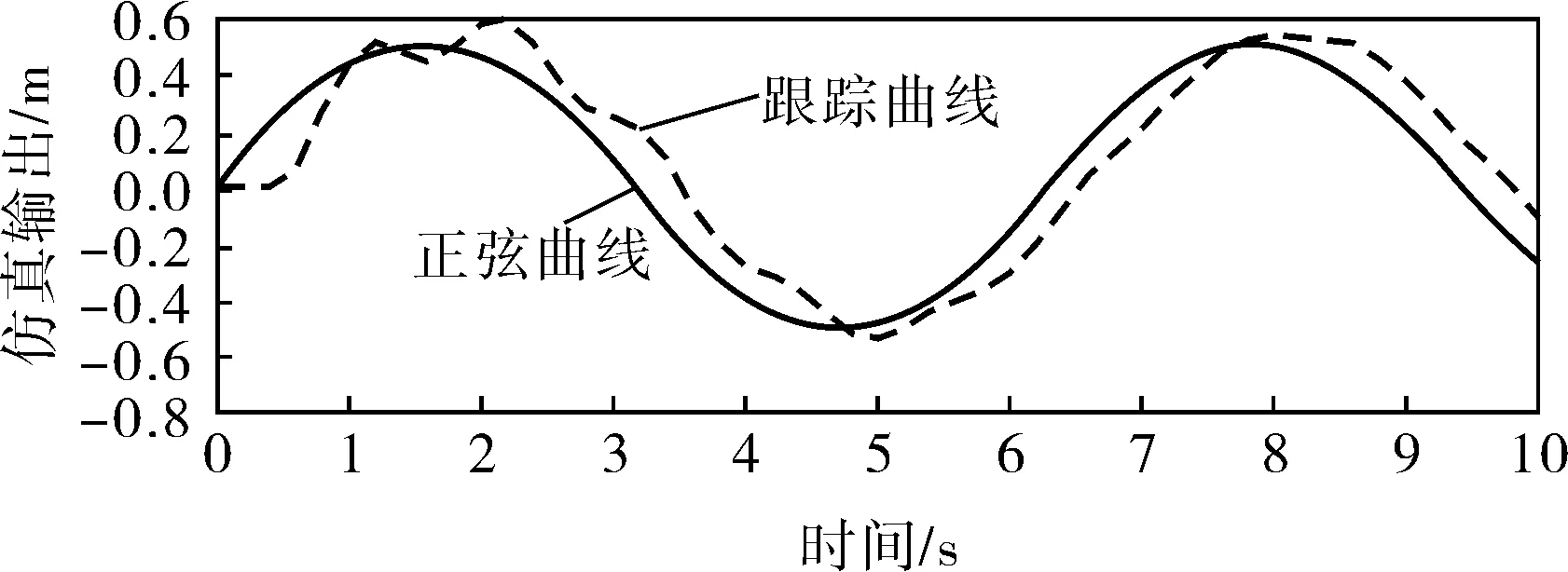
圖3 PD控制器跟蹤曲線

圖4 T-S模糊神經(jīng)網(wǎng)絡(luò)控制器跟蹤曲線
圖5為PD控制器與T-S模糊神經(jīng)網(wǎng)絡(luò)控制器跟蹤誤差的對(duì)比圖,由此可以分析得出,T-S模糊神經(jīng)網(wǎng)絡(luò)控制器相比傳統(tǒng)的PD控制器跟蹤誤差更小,穩(wěn)定性更強(qiáng)。
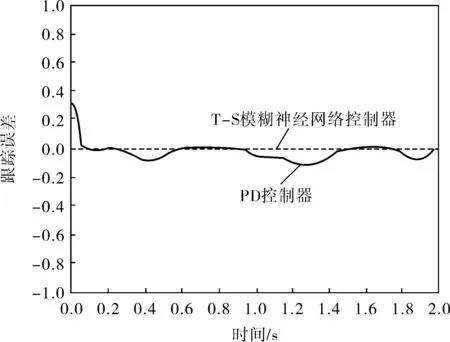
圖5 PD控制器與T-S模糊神經(jīng)
3 結(jié)束語(yǔ)
筆者利用T-S模糊神經(jīng)網(wǎng)絡(luò)控制算法,對(duì)AGV的運(yùn)行軌跡進(jìn)行了跟蹤控制。通過(guò)仿真驗(yàn)證,該算法能滿足控制要求,相比傳統(tǒng)PD控制器,精確度更高,跟蹤效果更加良好。
[1] 楊遠(yuǎn)航,方慶琯.基于模糊控制的AGV軌跡跟蹤研究[J].起重運(yùn)輸機(jī)械,2011,(2):16~18.
[2] 唐勇奇,趙葵銀,伍萍輝.一種基于模糊神經(jīng)元混合控制器的交流驅(qū)動(dòng)系統(tǒng)[J].化工自動(dòng)化及儀表,2001,28(2):49~52.
[3] 廖華麗,周祥,董豐,等.基于模糊控制的AGV尋跡算法[J].哈爾濱工業(yè)大學(xué)學(xué)報(bào),2005,37(7):896~898.
[4] Tlale N S.Fuzzy Logic Controller with Slip Detection Behaviour for Mecallum-wheeled AGV[J].Robotica,2005,23(4):455~456.
[5] Wu Y W, Sun X M,Ren C M,et al.Research on Human-like Intelligent PID Control Algorithm in the Temperature Control[C]. 2003 International Conference on Machine Learning and Cybernetics.xi′an:IEEE,2003:681~685.
[6] 王憲,盛巍,宋書林,等.T-S模糊模型變結(jié)構(gòu)的機(jī)器臂軌跡跟蹤控制[J].計(jì)算機(jī)系統(tǒng)應(yīng)用,2012,21(2):59~64.
[7] 覃才瓏.實(shí)驗(yàn)型AGV控制與導(dǎo)引系統(tǒng)研究與開(kāi)發(fā)[D].南寧:廣西大學(xué),2012.
[8] 趙德云,楊厚華,王哲.基于模糊神經(jīng)網(wǎng)絡(luò)控制的AGV避障路徑規(guī)劃仿真[J].機(jī)電工程,2010,27(9):27~31.
[9] 莊利鋒,楊慧中,張志強(qiáng),等.一種分布式模糊神經(jīng)網(wǎng)絡(luò)在熔融指數(shù)軟測(cè)量中的應(yīng)用[J].化工自動(dòng)化及儀表,2004,31(4):16~18.
聲明
本刊現(xiàn)入編“萬(wàn)方數(shù)據(jù)——數(shù)字化期刊群”和“中國(guó)核心期刊(遴選)數(shù)據(jù)庫(kù)”,作者著作權(quán)使用費(fèi)與本刊稿酬一次性給付,不再另行發(fā)放。作者如不同意將文章入編,投稿時(shí)敬請(qǐng)說(shuō)明。
ResearchonAGVTrajectoryTrackingBasedon
T-SFuzzyNeuralNetwork
CHEN Wei, CHENG Hang, ZHENG Tao
(SchoolofElectricalEngineeringandAutomation,HefeiUniversityofTechnology,Hefei230009,China)
Considering the AGV trajectory tracking, the AGV’s kinematics model was analyzed and T-S fuzzy neural network model was applied to design a fuzzy neural controller. Simulating it with Matlab and comparing it with ordinary PD controller show that this T-S-based fuzzy neural network controller can improve AGV stability and robustness, and it outperforms the traditional control algorithm.
T-S fuzzy neural network, AGV, trajectory tracking, Matlab
2016-02-29(修改稿)
TH865
A
1000-3932(2016)04-0367-03
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
