溶解氧的廣義預(yù)測(cè)控制仿真研究
2016-11-22 06:22:09薛美盛薛生輝李先知孫勝杰
化工自動(dòng)化及儀表 2016年4期
薛美盛 袁 鑫 薛生輝 李先知 孫勝杰
(中國(guó)科學(xué)技術(shù)大學(xué)自動(dòng)化系,合肥 230026)
溶解氧的廣義預(yù)測(cè)控制仿真研究
薛美盛 袁 鑫 薛生輝 李先知 孫勝杰
(中國(guó)科學(xué)技術(shù)大學(xué)自動(dòng)化系,合肥 230026)
通過(guò)Matlab仿真,運(yùn)用漸消記憶遞推最小二乘法進(jìn)行在線辨識(shí),對(duì)溶解氧過(guò)程進(jìn)行了廣義預(yù)測(cè)控制的研究。通過(guò)嘗試不同控制器參數(shù),找到了控制效果較好的參數(shù)組合。同時(shí)對(duì)廣義預(yù)測(cè)控制在快時(shí)變系統(tǒng)上的應(yīng)用和相關(guān)參數(shù)的影響進(jìn)行了探索。研究表明:廣義預(yù)測(cè)控制比模糊自適應(yīng)PID控制的電耗指標(biāo)有所減少。
廣義預(yù)測(cè)控制 溶解氧 漸消記憶遞推最小二乘法 模型在線辨識(shí)
由于溶解氧過(guò)程存在非線性和時(shí)變性,難以精確建模[1~3],因而關(guān)于溶解氧在常規(guī)控制和基于規(guī)則的控制方面的研究較多[3~7],而基于模型的控制的研究則較少。為了實(shí)現(xiàn)溶解氧濃度的精確控制,需要在溶解氧過(guò)程模型的在線辨識(shí)和基于模型的控制方面進(jìn)行一定的研究。廣義預(yù)測(cè)控制是一種具有自適應(yīng)功能的預(yù)測(cè)控制技術(shù),由Clarke D W等于1987年提出[8,9]。與一般的預(yù)測(cè)控制方法相比,它更強(qiáng)調(diào)在線適應(yīng)被控對(duì)象特性的變化。對(duì)于變參數(shù)、變時(shí)延、變階次的系統(tǒng),只要輸入輸出數(shù)據(jù)足夠豐富,就能夠進(jìn)行適當(dāng)?shù)南到y(tǒng)辨識(shí),運(yùn)用廣義預(yù)測(cè)控制獲得穩(wěn)定的控制效果。筆者運(yùn)用漸消記憶遞推最小二乘法進(jìn)行模型的在線辨識(shí),針對(duì)溶解氧過(guò)程進(jìn)行了廣義預(yù)測(cè)控制的研究。
1 廣義預(yù)測(cè)控制①
1.1 模型
廣義預(yù)測(cè)控制采用受控自回歸積分滑動(dòng)平均
(Controlled Auto-Regressive Integral Moving-Average,CARIMA)模型,當(dāng)取C(q-1)=1時(shí),其增量模型如下:
A(q-1)Δy(t)=B(q-1)Δu(t-k)+ξ(t)
(1)
將式(1)作為廣義預(yù)測(cè)控制的模型。
1.2預(yù)測(cè)
利用Diophantus方程推導(dǎo)j步最優(yōu)輸出預(yù)測(cè):
1=Ej(q-1)A(q-1)Δ+q-jFj(q-1)
(2)
其中,Δ為后向差分算子,由式(2)可以看出,Ej(q-1)、Fj(q-1)由j和A(q-1)唯一確定。由式(2)可推導(dǎo)出Ej(q-1)、Fj(q-1)和Gj(q-1)的遞推表達(dá)式。其中,Gj(q-1)的前j項(xiàng)是式(1)單位階躍響應(yīng)的前j項(xiàng)。
將系統(tǒng)預(yù)測(cè)輸出分成兩部分,一部分由t時(shí)刻已知信息組成,一部分由t時(shí)刻未知信息組成。用p表示預(yù)測(cè)步長(zhǎng),對(duì)i=0,1,…,p-1,系統(tǒng)預(yù)測(cè)輸出如下:
y(t+k+i)=Fk+i(q-1)y(t)+Gk+i(q-1)Δu(t+i)+Ek+i(q-1)ξ(t+k+i)

(3)
Y=[y(t+k)y(t+k+1)…y(t+k+p-1)]T
ΔU=[Δu(t) Δu(t+1)…Δu(t+p-1)]T
E=[Ek(q-1)ξ(t+k)Ek+1(q-1)ξ(t+k+1)
…Ek+p-1(q-1)ξ(t+k+p-1)]T
則式(3)可表示為如下形式:
Y=Yt+GΔU+E
(4)
1.3設(shè)定值規(guī)劃
按下式對(duì)系統(tǒng)未來(lái)的設(shè)定值軌跡進(jìn)行規(guī)劃:

(5)
其中,SP(t)為t時(shí)刻系統(tǒng)的設(shè)定值,w(t+j)是未來(lái)t+j時(shí)刻系統(tǒng)的柔化設(shè)定值,α為柔化因子。
1.4目標(biāo)函數(shù)與優(yōu)化控制
記W=[w(t+k)w(t+k+1)…w(t+k+
p-1)]T,取目標(biāo)函數(shù)為:

λΔUTΔU]
(6)

ΔU=(GTG+λI)-1GT(W-Yt)
(7)
實(shí)際應(yīng)用中,只需要計(jì)算當(dāng)前時(shí)刻的控制量u(t),即:
(8)

2 漸消記憶遞推最小二乘法
溶解氧模型具有時(shí)變性,模型參數(shù)與當(dāng)前時(shí)刻的進(jìn)水流量和呼吸速率緊密相關(guān),而進(jìn)水流量和呼吸速率處于時(shí)刻變化的狀態(tài),所以模型參數(shù)的辨識(shí)對(duì)之前的輸入輸出狀態(tài)依賴性不強(qiáng)。因此,溶解氧模型的參數(shù)采用帶有遺忘因子的漸消記憶遞推最小二乘法進(jìn)行辨識(shí)。
假設(shè)從t時(shí)刻后開始測(cè)得N組數(shù)據(jù),并定義向量和矩陣如下:
x(t+i)=[-Δy(t+i-1)…-Δy(t+i-na) Δu(t-
k+i) Δu(t-k+i-1)…Δu(t-k+i-nb)]T
X(N)=[x(t+1)x(t+2)…x(t+N)]T
Y(N)=[Δy(t+1) Δy(t+2)…Δy(t+N)]T
θ=[a1a2…anab0b1…bnb]T
Ξ(N)=[ξ(t+1)ξ(t+2)…ξ(t+N)]T
其中,i=1,2,…,N。由式(1)可知,有:
Y(N)=X(N)θ+Ξ(N)
(9)

(10)
假設(shè)指數(shù)權(quán)(遺忘因子)為ρ,對(duì)于k組觀測(cè)數(shù)據(jù),目標(biāo)函數(shù)L(k)為:
(11)
記:
k-1)ε(t+k)]T
k-1)x(t+k)]T

k-1) Δy(t+k)]T

增加一組觀測(cè)數(shù)據(jù)后有:

(12)

(13)
(14)
式(12)~(14)構(gòu)成了漸消記憶遞推最小二乘法的遞推估計(jì)式。
3 溶解氧的廣義預(yù)測(cè)控制

經(jīng)反復(fù)實(shí)驗(yàn),當(dāng)預(yù)測(cè)步長(zhǎng)p≤3時(shí),能夠?qū)崿F(xiàn)穩(wěn)定的控制,且p≤2時(shí)的控制效果達(dá)到最好。控制量權(quán)重λ的影響不大,取λ=0.1。柔化因子α的影響與通常情況有所不同,α取0.9或0.1,相應(yīng)的p取2或3時(shí)的廣義預(yù)測(cè)控制效果分別如圖1~3所示。

圖1 α=0.9,p=2時(shí)溶解氧的廣義預(yù)測(cè)控制效果

圖2 α=0.1,p=3時(shí)溶解氧的廣義預(yù)測(cè)控制效果
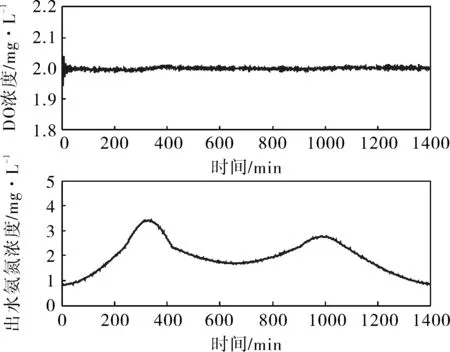
圖3 α=0.1,p=2時(shí)溶解氧的廣義預(yù)測(cè)控制效果
由式(5)可知,柔化因子α越靠近1,下一時(shí)刻的控制目標(biāo)越靠近其相應(yīng)的預(yù)測(cè)值,而非真實(shí)的設(shè)定值;α越靠近0,下一時(shí)刻的控制目標(biāo)越靠近其真實(shí)的設(shè)定值,而非相應(yīng)的預(yù)測(cè)值。對(duì)于參數(shù)比較固定或時(shí)變性不是很強(qiáng)的系統(tǒng),下一時(shí)刻的真實(shí)輸出與相應(yīng)的預(yù)測(cè)值是接近的,因而離預(yù)測(cè)值越近的更適合作為控制目標(biāo),α靠近1時(shí)更能得到平滑而精確的控制效果。相反,對(duì)于參數(shù)時(shí)變性很強(qiáng)的系統(tǒng),下一時(shí)刻的真實(shí)輸出與相應(yīng)的預(yù)測(cè)值可能相差很遠(yuǎn),因而將離預(yù)測(cè)值較近的作為控制目標(biāo)很不科學(xué)。最好的解決辦法就是讓控制目標(biāo)緊盯設(shè)定值,即讓?duì)列∫恍x0近一些,圖1和圖3的控制效果很好地說(shuō)明了這一點(diǎn)。因此,應(yīng)用于快時(shí)變領(lǐng)域時(shí),α的經(jīng)驗(yàn)取值應(yīng)擴(kuò)展至最大范圍。
由圖2、3可知,由于模型參數(shù)的時(shí)變性比較強(qiáng),因而預(yù)測(cè)步長(zhǎng)不宜過(guò)長(zhǎng),預(yù)測(cè)步長(zhǎng)越長(zhǎng),預(yù)測(cè)誤差越大,控制效果越差。
從圖1~3中可以看出,α=0.1,p=2時(shí)的控制效果最好,其穩(wěn)定性比較好,控制精度也比較高,出水氨氮濃度也低于污水排放一級(jí)A類標(biāo)準(zhǔn)。由文獻(xiàn)[13]中的式(6)計(jì)算得到的電耗指標(biāo)J=1226.8,比模糊自適應(yīng)PID控制的電耗指標(biāo)有所減少,從長(zhǎng)期來(lái)看廣義預(yù)測(cè)控制會(huì)更加節(jié)能。
4 結(jié)束語(yǔ)
針對(duì)溶解氧過(guò)程在基于模型控制方面研究較少的問(wèn)題,運(yùn)用漸消記憶遞推最小二乘法進(jìn)行模型在線辨識(shí),對(duì)溶解氧過(guò)程的廣義預(yù)測(cè)控制進(jìn)行了研究。研究過(guò)程中發(fā)現(xiàn),柔化因子α和預(yù)測(cè)步長(zhǎng)p的取值與通常有所不同,甚至與經(jīng)驗(yàn)取法相反。因此,當(dāng)廣義預(yù)測(cè)控制應(yīng)用于快時(shí)變系統(tǒng)或控制模型不精確時(shí),參數(shù)的經(jīng)驗(yàn)取值需要進(jìn)行修正,應(yīng)擴(kuò)展至最大范圍。這也是對(duì)廣義預(yù)測(cè)控制的參數(shù)整定問(wèn)題進(jìn)行了補(bǔ)充和完善。
[1] 趙金憲,張志強(qiáng).模糊自適應(yīng)PID控制在污水處理溶解氧控制中的應(yīng)用[J].機(jī)械制造與自動(dòng)化,2011,40(4):161~164.
[2] 杜樹新.污水生化處理過(guò)程建模與控制[J].控制理論與應(yīng)用,2002,19(5):660~666.
[3] 王健,張興申.污水處理系統(tǒng)溶解氧的模糊自適應(yīng)PID控制[J].自動(dòng)化與儀器儀表,2010,(1):39~41.
[4] 彭勇.濟(jì)南市水質(zhì)凈化一廠鼓風(fēng)曝氣系統(tǒng)自動(dòng)控制研究[D].濟(jì)南:山東大學(xué),2006.
[5] 張翔.基于模糊PID控制的SBR污水處理系統(tǒng)[D].武漢:武漢科技大學(xué),2009.
[6] 牛秦洲,張宗喜.基于模糊推理PID參數(shù)自整定在鼓風(fēng)曝氣控制中的應(yīng)用[J].制造業(yè)自動(dòng)化,2011,33(18):101~104.
[7] Shen T G, Qiu Y, Shi H C. Mathematical Simulation of Feedforward Control of Nutrient Removal in Anerobic-anoxic-oxic Processes[J].Environmental Engineering Science,2010,27(8):633~641.
[8] Clarke D W,Mohtadi C,Tuffs P S.Generalized Predictive Control—Part I.The Basic Algorithm[J].Automatica,1987,23(2):137~148.
[9] Clarke D W,Mohtadi C,Tuffs P S.Generalized Predictive Control—Part II.Extensions and Interpretations[J].Automatica,1987,23(2):149~160.
[10] 席裕庚.預(yù)測(cè)控制[M].北京:國(guó)防工業(yè)出版社,1993.
[11] 舒迪前.預(yù)測(cè)控制系統(tǒng)及應(yīng)用[M].北京:機(jī)械工業(yè)出版社,1996.
[12] 馮培悌.系統(tǒng)辨識(shí)[M].杭州:浙江大學(xué)出版社,2004.
[13] 薛美盛,薛生輝.基于氨氮前饋的溶解氧模糊自適應(yīng)PID控制[J].化工自動(dòng)化及儀表,2014,41(3):233~237,266.
《化工自動(dòng)化及儀表》2016年征稿簡(jiǎn)則
1.專業(yè)范圍
報(bào)道化工、石油化工、冶金、電力、醫(yī)藥、造紙、紡織等行業(yè)過(guò)程控制理論與應(yīng)用、計(jì)算機(jī)技術(shù)及其應(yīng)用、檢測(cè)技術(shù)研究與應(yīng)用、控制裝置設(shè)計(jì)及應(yīng)用、儀器儀表技術(shù)開發(fā)與應(yīng)用、企業(yè)技術(shù)改造經(jīng)驗(yàn)等。
2.報(bào)道內(nèi)容
◆綜述與評(píng)論。博采眾覽,兼收并蓄,及時(shí)、準(zhǔn)確、全面地反映國(guó)內(nèi)外過(guò)程控制技術(shù)、檢測(cè)技術(shù)、計(jì)算機(jī)技術(shù)及儀器儀表技術(shù)的發(fā)展動(dòng)態(tài)、趨勢(shì)和水平。著文要求準(zhǔn)確性和權(quán)威性,信息量大,能夠較全面地闡明命題的過(guò)去、現(xiàn)狀及發(fā)展。
◆過(guò)程控制。報(bào)道現(xiàn)代控制理論的研究與應(yīng)用,新型控制策略及控制技術(shù)的應(yīng)用實(shí)例;先進(jìn)控制系統(tǒng)及控制裝置的現(xiàn)場(chǎng)應(yīng)用;國(guó)家重大科技攻關(guān)項(xiàng)目及成果。
◆檢測(cè)與儀表。報(bào)道國(guó)內(nèi)外先進(jìn)的檢測(cè)技術(shù)、自動(dòng)化儀器儀表技術(shù)的開發(fā)與應(yīng)用。
◆研究與應(yīng)用。報(bào)道控制技術(shù)、檢測(cè)技術(shù)、計(jì)算機(jī)技術(shù)、儀器儀表技術(shù)等的研發(fā)及其在工業(yè)生產(chǎn)中的應(yīng)用。
◆技改與創(chuàng)新。報(bào)道技術(shù)改造和技術(shù)成果,系統(tǒng)及儀表的日常檢測(cè)與維修經(jīng)驗(yàn)等,著文要求突出實(shí)用性。
3.投稿要求
◆文稿應(yīng)簡(jiǎn)明扼要,突出重點(diǎn),公式、數(shù)據(jù)準(zhǔn)確。
◆要求E-mail投搞,一律為Word文檔(A4幅面,單倍行距,通欄,五號(hào)字體),不受理復(fù)印稿或傳真稿。
◆每篇文章請(qǐng)附150~200字中、英文摘要,4~6個(gè)中、英文關(guān)鍵詞,作者所在單位的中、英文名稱。
◆若條件允許,每篇文章請(qǐng)附中圖分類號(hào)(分類方法請(qǐng)參考《中國(guó)圖書館分類法》第四版)。
◆圖、表要有圖題、表題,圖中文字、符號(hào)、數(shù)字、圖注需清楚,圖、表中標(biāo)注盡量用中文。
◆公式另行居中書寫,大/小寫、上/下標(biāo)標(biāo)注清楚。
◆為使您的稿件能夠被及時(shí)處理,投稿時(shí)請(qǐng)務(wù)必提供每位作者的詳細(xì)信息,包括郵編、聯(lián)系地址、工作單位、電話等。
4.稿件受理
◆來(lái)稿收到后即以電子郵件方式給以回復(fù),并分配稿件登記號(hào),以便于查詢。
◆投稿后若有變動(dòng)(如撤稿,作者通訊地址、聯(lián)系方式改變等),請(qǐng)務(wù)必通知編輯部。
◆審稿周期為15個(gè)工作日。
◆刊物出版后,向作者贈(zèng)送兩本當(dāng)期刊物。
GeneralizedPredictiveControlofDissolvedOxygen
XUE Mei-sheng, YUAN Xin, XUE Sheng-hui, LI Xian-zhi, SUN Sheng-jie
(Dept.ofAutomation,UniversityofScienceandTechnologyofChina,Hefei230026,China)
Through Matlab simulation and applying fading-memory recursive least-squares method to implement online identification, the generalized predictive control (GPC) of dissolved oxygen (DO) was investigated; and through testing of various controller parameters, the combination of parameters which boasting of better control effect was found. Investigating GPC’s application in fast time-varying system and its influences on the parameters related show that GPC’s power consumption index somewhat decreases as compared to the fuzzy PID control.
GPC, dissolved oxygen, fading-memory recursive least-squares method, model online identification
2015-04-07(修改稿)
TH865
A
1000-3932(2016)04-0359-04
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
中老年保健(2021年12期)2021-11-30 02:58:01
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
中華詩(shī)詞(2018年11期)2018-03-26 06:41:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
