基于ARM—STM32F030x4的變電站日常巡視機器人研究
2016-11-21 22:02:16呂劍羅天宇葉宣廷
中國高新技術(shù)企業(yè) 2016年29期
關(guān)鍵詞:變電站
呂劍+羅天宇+葉宣廷


摘要:根據(jù)變電站巡視要求,提出一套機器人巡視的框架。文章著重討論各個模塊的算法,并根據(jù)各個算法,找到合適的硬件實現(xiàn)每個功能,以解決巡視中可能出現(xiàn)的問題,提高巡視效率和可靠性。處理器反面采用了最新的ARM-STM32F030x4,以保障各個功能的實現(xiàn),方便添加新增功能。
關(guān)鍵詞:變電站;巡檢機器人;STM32F030x4;柵格化算法;自動充電 文獻標(biāo)識碼:A
中圖分類號:TP242 文章編號:1009-2374(2016)29-0015-03 DOI:10.13535/j.cnki.11-4406/n.2016.29.007
今時今日,自動控制技術(shù)、傳感器技術(shù)、電子通訊技術(shù)以及人工智能等多種學(xué)科發(fā)展已具備相當(dāng)規(guī)模,機器人技術(shù)在各個領(lǐng)域的運用已日漸成熟。
在智能機器人代替成本日益上升的人工作業(yè)的大背景下,變電站自動化的探索日益緊迫。這就是本次變電站日常巡視機器人研究的初衷。
1 變電站巡視要求
變電站巡視包括巡視區(qū)域、巡視路線、巡視重要點和巡視設(shè)備。巡視區(qū)域設(shè)定在變電站內(nèi)部,當(dāng)區(qū)域較大時可以根據(jù)設(shè)備運行情況將巡視區(qū)域分為幾個小塊。巡視路線根據(jù)當(dāng)?shù)貐^(qū)縣相關(guān)人員巡視規(guī)定和實際路線情況進行編制。巡視重要點是指巡視路線中需要停靠的點,需要注意停靠時間和攝像頭角度。巡視設(shè)備是巡視的基本對象,包括變壓器、開關(guān)、避雷器、母線等。
2 機器人內(nèi)部硬件架構(gòu)
變電站巡檢機器人內(nèi)部硬件架構(gòu)分為驅(qū)動電機、微控制器、傳感器、無線傳輸器這四個部分組成。
2.1 驅(qū)動電機
采用的是永磁式步進電機,分別位于機器人的左側(cè)和右側(cè)。電機的驅(qū)動芯片為BA6845FS,與系統(tǒng)通過電池的輸出電壓直接連接。
2.2 微控制器
采用的是ARM-STM32F030x4。該芯片由德國ST公司開發(fā),64組管腳定義可實現(xiàn)包括WIFI傳輸控制、電機運動控制、電池電量檢測、傳感器控制等一系列功能。調(diào)試器使用的是ST-Link(v2 SWD模式)芯片晶振采用16M/32M/48M晶振,可實現(xiàn)納秒級別的精確計算,以做到驅(qū)動控制的準(zhǔn)確無誤;閃存上可實現(xiàn)32bits,速度基本凌駕于市面上CPU處理器,在智能機器人的控制方面更為適合;內(nèi)核溫度可承受150℃,除去自身發(fā)熱源,可承載環(huán)境溫度120℃,安全級別達到了汽車安全級別,保證了機器人的安全穩(wěn)定運行;芯片設(shè)有施密德觸發(fā)特效,能有效保障機器人在變電站這種高頻的電磁波以及大電流這些EMC的干擾較大的場合中穩(wěn)定運行。為了確保長期穩(wěn)定運行,CPU安全級別以及驅(qū)動回路的抗干擾性將是我們在選擇設(shè)計時必須重點考慮的事項,而ARM-STM32F030x4將施密特性集成于微控制器內(nèi)部要比在芯片外面施加保護來得更加安全。除此之外,微控制處理器ARM-STM32F030x4采用雙向CAN,可以實現(xiàn)一路為傳感器讀寫CAN,一路為檢修CAN,為區(qū)分可以稱為FCAN以及PCAN,F(xiàn)CAN可以實時與傳感器交互數(shù)據(jù),我們利用PCAN可以對CPU運行數(shù)據(jù)實時監(jiān)測以及備份。
2.3 傳感器
紅外傳感器共四個,1號、4號位于機器人左前方和右前方,2號、3號位于前端。型號是IRM8601S。傳感器內(nèi)部集成自動增益控制電路、輸出驅(qū)動電路、解碼電路及帶通濾波電路。該接頭最為有效的紅外線信號的載波頻率為38kHz。當(dāng)它檢測到有效紅外線信號時輸出低電平,未檢測到則輸出高電平。
2.4 無線傳輸器
WIFI通信的硬件方面使用的是TPLINK無線網(wǎng)卡和全向天線,并使用TRF6903芯片處理收發(fā)信息。架構(gòu)如圖1所示:
3 機器人運行軟件模塊
3.1 路線以及環(huán)境模塊
在確定好巡視路線的情況下,就要建立環(huán)境模型并且優(yōu)化機器人巡視路徑。
在眾多環(huán)境建模方法中,我們選擇了柵格法進行建模。其優(yōu)點為計算量較小,容易加入更新的內(nèi)容,符合變電站環(huán)境搜索的各類要求。
柵格法(Cell Modeling Method)的基本原理是地圖建模的一種方法,柵格法實質(zhì)上是將工作環(huán)境進行單元分割,將其用大小相等的方塊表示出來。
將變電站進行柵格化建模后,就要建立機器人的“記憶庫”進行路徑的制定。為了把上下左右四個方向參數(shù)類型轉(zhuǎn)換為微型控制器能夠識別的符號,我們將向上的方向定義為0、向右為1、向下為2、向左為3,如圖2所示:
機器人頭部傳感器的位置和方向相對于機器人是不動的。而相對于變電站的環(huán)境來說,它們的方向是在改變的,這就涉及到“絕對方向”和“相對方向”問題。
相對方向:以機器人當(dāng)前行走方向為參照的方向。
絕對方向:以變電站絕對坐標(biāo)平面為參照的方向。
這樣就會涉及到相對方向和絕對方向的互換的問題。在本文中采取了以變量Dir記錄機器人前進方向上的絕對方向值,即前方的絕對方向值始終設(shè)為Dir,這樣機器人的相對方向轉(zhuǎn)換成絕對方向。如表1所示:
轉(zhuǎn)換為坐標(biāo)顯示,初始點為(0,0)機器人會將走過的路線坐標(biāo)進行儲存。如表2所示:
以臨海市110kV鏡都變?yōu)槔瑘D4為實景模擬圖,黑色部分為根據(jù)相關(guān)規(guī)定設(shè)計的機器人巡視路線。如圖3所示:
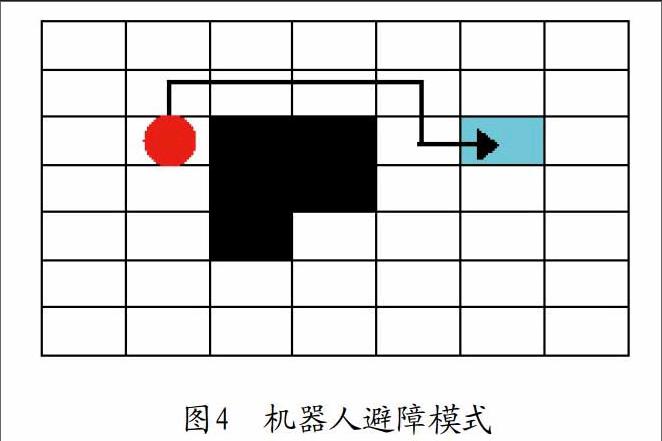
3.2 避障模塊
當(dāng)機器人在變電站自動巡檢時,可能會出現(xiàn)計劃外的障礙物擋在原來設(shè)定的路線上,這就需要設(shè)定機器人自動避障模塊以減少操作人員的操作。其原理如下:機器人在O點探測到靜態(tài)障礙物,考慮靜態(tài)障礙物相對于機器人的方向(在O點,將方向歸為四類:右方、上方、左方、下方,在其余點,方向仍然分為八類)。設(shè)機器人在O處的位置為(xo,yo),局部子目標(biāo)Pgoal位置為(xp,yp)。
(1)障礙物在右方:如果yp≥yo,機器人做逆時針運動;如果yp
猜你喜歡
電子制作(2019年10期)2019-06-17 11:44:56
電子制作(2018年8期)2018-06-26 06:43:34
電子制作(2017年8期)2017-06-05 09:36:15
電子制作(2017年24期)2017-02-02 07:14:44
現(xiàn)代工業(yè)經(jīng)濟和信息化(2016年5期)2016-05-17 05:35:57
東北電力技術(shù)(2016年2期)2016-05-17 04:32:54
河南電力(2015年5期)2015-06-08 06:01:45
中國工程咨詢(2015年10期)2015-02-14 05:57:34
水電站機電技術(shù)(2014年1期)2014-09-26 11:59:53
中國機械(2014年15期)2014-04-29 00:09:45