近炸引信半實物仿真控制系統
2016-11-17 03:45:06溫競龍
探測與控制學報 2016年5期
溫競龍,鄭 賓
(1.中北大學儀器科學與動態測試教育部重點實驗室,山西 太原 030051;2.電子測試技術重點實驗室,山西 太原 030051)
?
近炸引信半實物仿真控制系統
溫競龍1,2,鄭 賓1,2
(1.中北大學儀器科學與動態測試教育部重點實驗室,山西 太原 030051;2.電子測試技術重點實驗室,山西 太原 030051)
針對近炸引信交會試驗中目標等效靶體設計相對復雜和成本高的問題,為了測試導彈引信對目標姿態及方位探測能力是否滿足設計要求,提出了近炸引信半實物仿真控制系統。該系統是利用吊掛方法將目標靶體懸于空中,通過改變吊繩的長短以及轉盤轉動方向,使目標靶體滿足設定的姿態,并利用C++Builder編制系統控制軟件,實現目標靶體姿態的自動化調整。實驗測試結果與仿真誤差分析表明,測試結果與建模仿真相符,且在姿態、角度調整誤差要求范圍之內,準確地實現半實物仿真控制系統對目標等效靶體的姿態調整。
近炸引信;半實物仿真;姿態;角度調整
0 引言
近炸引信交會試驗系統的研發由于高技術、高投入、高風險等特點,迫切需求半實物仿真試驗系統對引信系統性能進行詳細測試和試驗驗證,根據引信交會模型生成詳細技術參數,完成調整飛行體設定的不同姿態[1-3]。半實物仿真技術是伴隨著自動化武器系統的研制以及計算機技術的發展而迅速發展起來的,能為武器的研制試驗提供最優手段,大多數半實物仿真精力主要集中在技術層次[4-6],如英國SowerBy研究中心的紅外成像制導仿真系統,美國的紅外成像制導仿真系統AGSL[7]。近炸引信交會試驗中目標等效靶體設計相對復雜且成本很高,為了測試導彈引信對目標姿態及方位探測能力是否滿足設計要求,本文針對此問題,提出了近炸引信半實物仿真控制系統。
1 半實物仿真控制系統組成
近炸引信半實物仿真控制系統由頂部吊掛轉盤、兩個PLC可編程控制器、五個增量式編碼器、五個交流變頻器、六個交流電機、位置開關、卷筒吊繩、電控柜及相關系統軟件組成。該飛行體的吊掛姿態調整是由俯仰吊繩、兩根滾轉吊繩共同作用于飛行體來實現飛行體姿態角度的任意調整;中心繩單獨由一臺蝸輪蝸桿減速電機、一個單層卷筒組成,在姿態調整時不參與飛行體姿態的調整,只起到安全繩的作用。偏航驅動裝置由兩個蝸輪蝸桿減速電機和鏈輪傳動組成,電機通過傳動鏈輪來驅動固定在吊盤上的走輪,進而帶動吊盤轉動,實現目標模型偏航角的任意調整。近炸引信半實物仿真控制系統的結構組成如圖1所示,其半實物仿真控制系統原理圖如圖2所示。
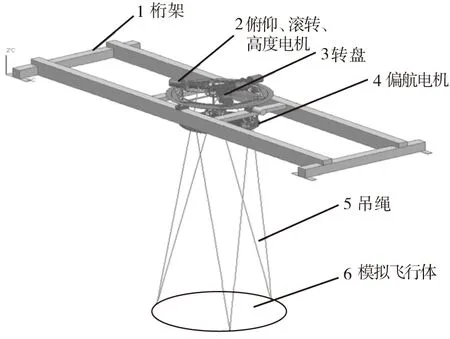
圖1 近炸引信半實物仿真控制系統結構圖Fig.1 Structure of the HILS control system
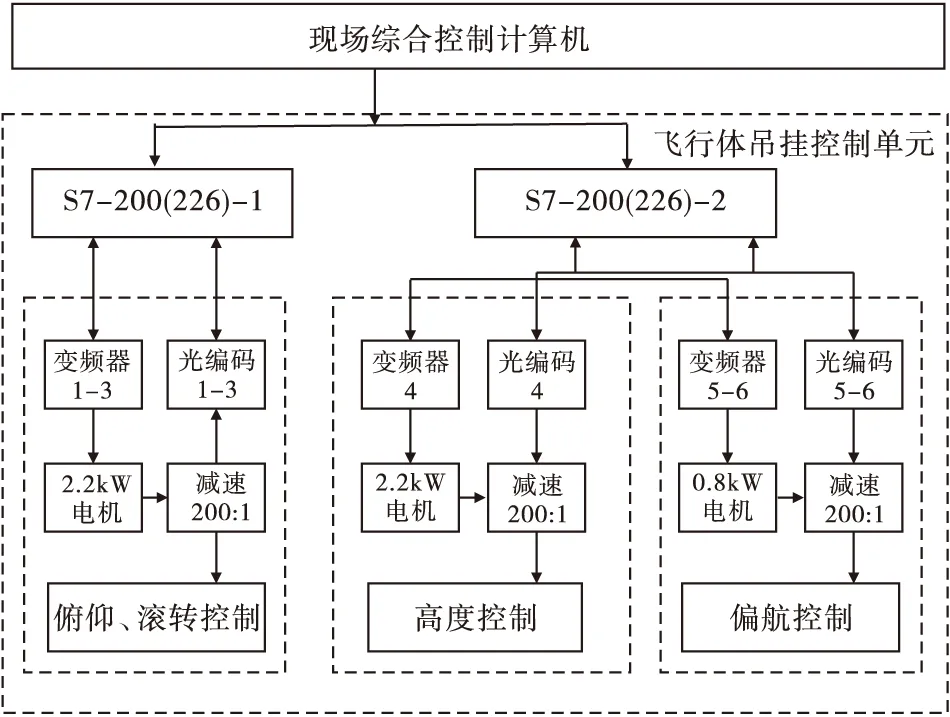
圖2 近炸引信半實物仿真控制系統原理圖Fig.2 Schematic diagram of the HILS control system
2 數學模型建立
飛行體姿態模型解決的問題是:如何使用吊掛方法讓飛行體達到所設定的姿態角度。當繩長縮短或升長時,飛行體發生傾斜,模型物體所受的合力矩發生變化,會使模型物體由原來的靜止開始擺動,導致飛行體物體偏離原坐標系,其靜止后的姿態如果單以幾何學考慮,則更加復雜難以解決。基于以上分析,應當結合相關的靜力學知識,分析飛行體物體的受力情況,列出模型物體在靜止時需滿足的力學方程式,解此方程即可。根據以上分析,該飛行體吊掛姿態算法模型的確定是建立在空間剛體的力學模型上,通過空間剛體在任一位置時的力平衡與力矩平衡的充分必要條件[8],即:
∑F合=0
(1)
∑M合=0
(2)
數學模型建立的關鍵是未知數設定及方程組的建立,該仿真模型算法的未知數為:飛行體重心位置水平方向的未知偏移量(a,b),各姿態吊繩的受力大小(fA,fB,fC)及飛行體的附加偏航角度η,故需六個獨立方程這樣才能滿足方程中未知數求解的條件。
首先列出飛行體頭部、左部、右部上的掛點A、B、C在重心O處的坐標:A(a1a2a3),B(b1b2b3),C(c1c2c3),并定義這一小坐標系為OXYZ坐標系,其單位向量為r(i;j;k)。其次,寫出吊環上對應于A、B、C的掛點A1、B1、C1、D1、E1、F1在吊環中心O1處的坐標,A1(a11a12a13)、B1(b11b12b13)、C1(c11c12c13)、D1(d11d12d13)、E1(e11e12e13)、F1(f11f12f13)并定義這一大坐標系為O1X1Y1Z1坐標系,其單位向量為r1(i1;j1;k1)。其中近炸引信半實物仿真控制系統吊掛位置示意圖如圖3所示。
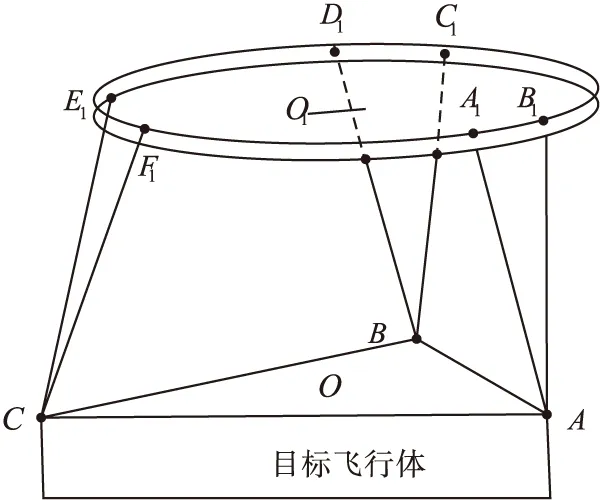
圖3 飛行體姿態仿真系統吊掛位置示意圖Fig.3 Hanging position of the flight attitude simulation system
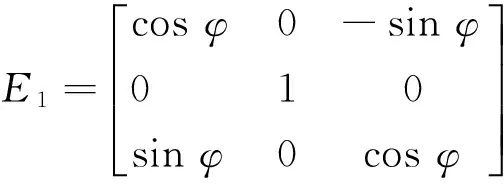
當飛行體姿態變化時,先假設重心O在大坐標系的坐標為(a,b,h),(a,b)為重心的未知水平偏移,h為已知高度,附加偏航角為η,并建立兩坐標系間的轉換關系。滾轉角φ、俯仰角θ、偏航角η發生改變,其對應的轉換矩陣為:
由此,易得出O1A、O1B、O1C在大坐標系下的表達式:
(3)
(4)
(5)
設E=E1E2E3,則:
其中:d1=cos ηcos φ-sin ηsin θsin φ,
d2=sin ηcos φ+cos ηsin θsin φ,
d3=-cos θsin φ,d4=-sin ηcos θ,
d5=cos ηcos θ,d6=sin θ,
d7=cos ηsin φ+sin ηsin θcos φ,
d8=sin ηsin φ-cos ηsin θcos φ,d9=cos θcos φ
將簡化后的E代入式(3)、(4)、(5)并展開得:
O1A=(a1d1+a2d4+a3d7+a)i1+
(a1d2+a2d5+a3d8+b)j1+
(a1d3+a2d6+a3d9+h)k1
(6)
O1B=(b1d1+b2d4+b3d7+a)i1+
(b1d2+b2d5+b3d8+b)j1+
(b1d3+b2d6+b3d9+h)k1
(7)
O1C=(c1d1+c2d4+c3d7+a)i1+
(c1d2+c2d5+c3d8+b)j1+
(c1d3+c2d6+c3d9+h)k1
(8)
設力的大小分別為fA,fB,fC為未知,而力的方向分別為AA1、AB1、BC1、BD1、CE1、CF1的方向,AA1、AB1、BC1、BD1、CE1、CF1的模(即繩長)可求出,則沿各吊繩方向的力為:
當姿態調整后靜止時,作用于飛行體的合力與合力矩平衡,以上吊盤中心點為大坐標原點O1,飛行體的重心為力矩作用點,則(1)式分解為以下兩式:
FA1+FB1+FC1+FD1+FE1+FF1+G=0
(9)
(10)
因此,將FA1、FB1、FC1、FD1、FE1、FF1、G、O1A、O1B、O1C分別代入式(9)和式(10),并將代入后的兩個矢量方程關于X、Y、Z軸三個方向上的標量方程分別列出,就可以得到含有六個未知數的六元標量方程組。可利用數學仿真軟件Matlab中的多元方程組的求解算法,確定目標調整姿態參數[9-10],解出在此確定姿態下的六個未知量(a,b,η,fA,fB,fC),從而得到確定姿態下的重心坐標水平方向的偏移(a,b),附加偏航角η,飛行體上各吊繩吊點在大坐標系下的坐標值,飛行體確定姿態時的各吊繩的準確長度,最后結合各個電機滾筒的周長計算出在該姿態下各個吊掛電機轉數。
3 系統軟件設計
近炸引信半實物仿真控制系統軟件是利用面向對象語言C++Builder進行編制。 C++Builder集成開發環境(IDE)提供了可視化窗體設計器、對象觀察器、控件板、工程管理器、集成編輯器和調試器等一系列可視化快速應用程序開發(RAD)工具,使開發者可以很輕松地建立和管理自己的程序和資源。仿真控制系統的流程圖如圖4所示。
近炸引信半實物仿真控制系統軟件主要采用控制系統主模塊與子模塊間調用來完成系統所需測試任務,實時處理采集的數據,計算相應的指標,在出現異常的情況下對控制系統及時修復處理,通過串口讀寫控制信號,控制飛行體姿態的自動調整。近炸引信半實物仿真控制系統軟件界面如圖5所示。
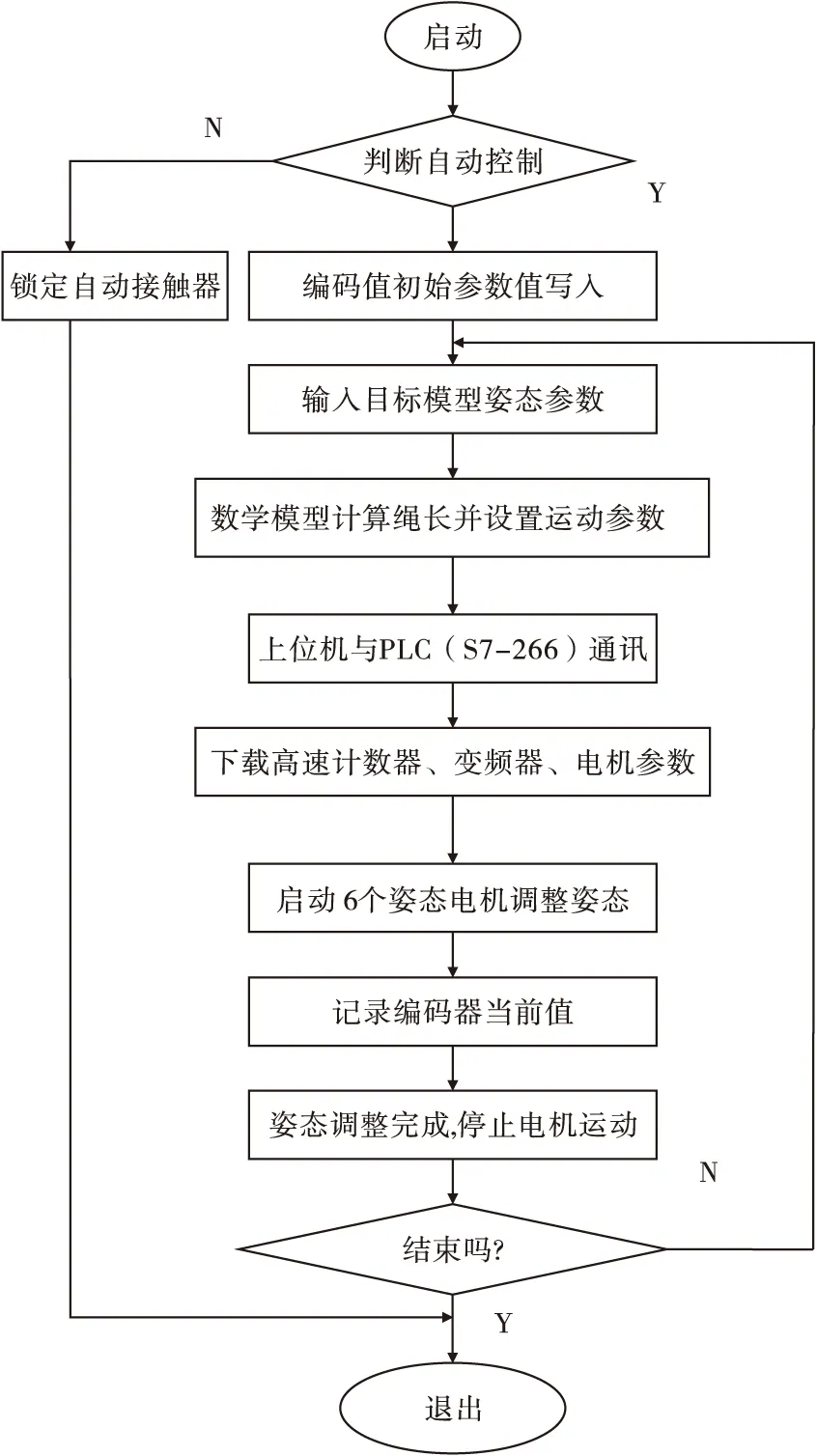
圖4 近炸引信半實物仿真控制系統流程圖Fig.4 Flow chart of the hils control system
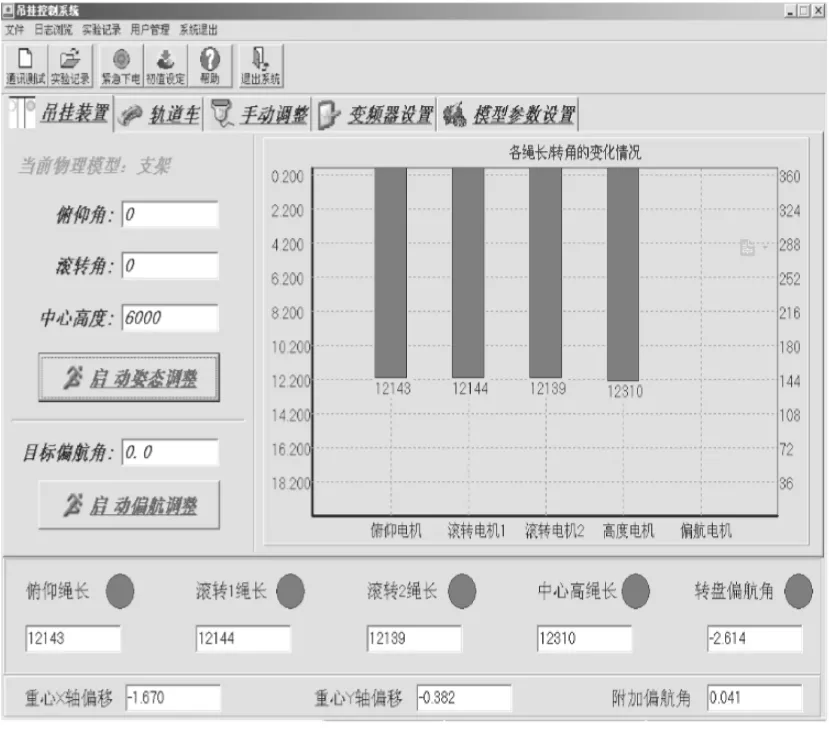
圖5 近炸引信半實物仿真控制系統軟件軟件主界面Fig.5 Main software interface of the hils control system
4 實驗測試結果與仿真誤差分析
近炸引信半實物仿真控制系統調試完成后,根據上位機軟件生成飛行體交會仿真所要求的確定姿態,在半實物仿真試驗室內,對該系統進行了驗收測試,試驗仿真分析結果及誤差分析如下:
1)確定飛行體在5 m、6 m、9 m、10 m高度時,單俯仰角項目測試。目標偏航角η為0°及目標滾轉角φ為0°時,目標俯仰角θ在-60°~+60°范圍內仿真模型實驗測試結果誤差分析如圖6所示。
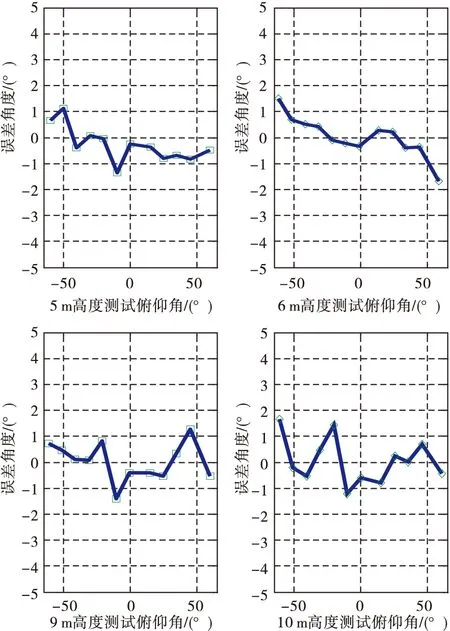
圖6 目標俯仰角仿真實驗測試結果誤差分析Fig.6 Simulation test results and error analysis of the target pitch angle
2)確定飛行體在5 m、6 m、9 m、10 m高度時,單滾轉角項目測試。目標偏航角η為0°及目標俯仰角θ為0°時,目標滾轉角φ在-70°~+70°范圍內仿真模型實驗測試結果誤差分析如圖7所示。
5 結論
本文提出了近炸引信半實物仿真控制系統。該系統是利用吊掛方法將目標靶體懸于空中,通過改變吊繩的長短以及轉盤轉動方向, 使目標靶體滿足設定的姿態, 并利用C++Builder編制系統控制軟件,實現目標靶體姿態的自動化調整。實驗測試結果與仿真誤差分析表明,測試結果與建模仿真相符,且在姿態、角度調整誤差要求范圍之內,準確地實現半實物仿真控制系統對目標等效靶體的姿態調整。該系統已經成功通過某制導武器引信的半實物仿真試驗驗收。

圖7 目標滾轉角仿真實驗測試結果誤差分析Fig.7 Simulation test results and error analysis of the target roll angle
[1]王占平,唐小宏,王亞非,等. 高速飛行的旋轉體姿態識別技術研究[J].電子科技大學學報,2007,36(2):203-206.
[2]楊小軍,施坤林,汪儀林,等. 基于磁傳感器/GPS組合制導飛行彈體的姿態和位置估計[J].兵工學報,2008,29(2):169-173.
[3]楊陽,崔金峰,余毅,等. 三旋翼飛行器動力學分析及建模[J].光學精密工程,2013,21(7):1873-1880.
[4]范世鵬,林德福,路宇龍,等. 激光導引頭跟蹤回路的設計與半實物仿真[J].紅外與激光工程,2014(11):3603-3607.
[5]崔占忠.引信發展若干問題[J].探測與控制學報,2008,30(2):1-4.
[6]鄭晨皓,王學敏,楊波,等. 基于PXI總線的引信低頻半實物仿真系統[J].探測與控制學報,2014,36(6):85-88.
[7]紀永祥,劉社鋒,陳維波,等. 對空近炸引信試驗與結果評定方法研究[J].探測與控制學報,2006,28(6):14-16.
[8]GANS N R, DIXON W E, LIND R.A hardware in the loop simulation platform for vision-based control of unmanned air vehicles[J].Mechatronics, 2009(19):1043-1056.
[9]PENG L, GENG Q B.Real-time simulation system for UAV based on Matlab/Simulink [C]// 2011 IEEE 2nd International Conference on Computing,Control and Industrial Engineering, Wuhan, China,2011:399-404.
[10]TARHAN M,ALTUG E.EKF Based attitude estimation and stabilization of a quadrotor UAV using vanishing points in catadioptric images[J].Journal of Intelligent & Robotic Systems,2011(62):587-607.
Hardware-in-the-loop Simulation Control System for Proximity Fuze
WEN Jinglong1,2,ZHENG Bin1,2
(1. Key Laboratory of Instrumentation Science & Dynamic Measurement, North University of China, Taiyuan 030051,China; 2. Ministry of Education, Science and Technology on Electronic Test & Measurement Laboratory,Taiyuan 030051,China)
The equivalent target body of the proximity fuze is complicated and costly in the real intersection test. For this situation, a proximity fuze hardware-in-loop simulation(HILS) system aimed at testing whether the target gesture and the azimuth detection capabilities was proposed in this paper to meet the design requirements provided by the missile fuze. In this system, the target body hanged in the sky to satisfy the setting gesture by changing the length of the sling and the rotation direction of the turntable. Then, C++Builder was used to draw up the control software to adjust the target body attitude automatically. The test results matched the modeling and the simulation result. Within the range of the angular and the attitude adjustment errors, the HILS system regulated the equivalent target body accurately.
proximity fuze;hardware-in-the-loop simulation;attitude;angle adjustment
2016-03-03
溫競龍(1988—),男,山西太原人,博士研究生,研究方向:動態測試。E-mail:wen-jing-long@163.com。
TJ430
A
1008-1194(2016)05-0022-05
