基于機器視覺的公路隧道襯砌檢測系統研究
2016-11-15 05:30:46賈磊
山西交通科技 2016年6期
賈 磊
(山西省交通科學研究院,山西 太原 030006)
0 引言
隨著我國高速公路的快速建設發展,隧道作為公路線上的咽喉工程,需要定期檢查維護,以確保其正常運行。當前,我國高速公路隧道檢測以人工方式為主,檢測效果并不理想。一是因為檢測時需要封閉交通,檢測時間不充足;二是因為隧道內環境惡劣,光照不足,給人工檢測帶來了諸多不便;三是難以對檢測結果進行重復判斷,準確性不足。同時,隨著科技水平提高,國內各地建起了許多特長隧道,傳統的人工方式已經不能滿足檢測任務要求[1]。《公路隧道養護技術規范》(JTG H12—2015)指出,為了提高隧道養護質量和技術水平,有必要積極采用隧道養護新設備,使我國隧道養護技術盡快達到較先進水平。
目前,歐美等發達國家先后開發出了基于機器視覺技術的路面檢測車,具有檢測效率高、人為因素少、無需封閉交通等優點,在路面檢測中已經有較為成熟的應用案例。而這類自動化智能檢測設備在公路隧道中還鮮有應用[2]。
針對上述問題,為了將機器視覺技術應用于公路隧道檢測,通過本項目的研究,提出一套公路隧道車載檢測系統的方案,對于提高公路隧道養護質量有重要意義。
1 總體方案設計
基于機器視覺的車載公路隧道襯砌檢測方法,其核心是利用相機對隧道襯砌進行連續拍照,將照片存儲在計算機中,然后再經過圖像處理軟件,提取出襯砌裂縫信息,諸如裂縫的幾何尺寸與具體位置等,最后對裂縫的總數以及嚴重程度做出統計性的評價,為隧道養護提供數據支撐[3]。
該檢測方法主要基于工業領域機器視覺檢測原理[4],利用先進的工業相機系統對隧道襯砌圖像進行快速采集,代替效率低下的人工檢測。采集到的圖像存儲在計算機上,通過專業的圖像處理軟件進行分析,實現對裂縫的識別、分類、測量和統計,總體上對裂縫現狀及發展趨勢進行評估。整個檢測系統需要安裝在專用的檢測車輛上,其硬件組成如圖1所示。本項目根據圖1所示的系統構架圖在實驗室中對設備進行組裝、調試和優化,并取得了階段性的成果。
1.1 工業相機
工業相機是機器視覺系統中的一個關鍵組件,其最本質的功能就是將光信號轉變成有序的電信號。選擇合適的相機也是機器視覺系統設計中的重要環節,相機的選擇不僅直接決定所采集到的圖像分辨率、圖像質量等,同時也與整個系統的運行模式直接相關。
工業相機中按傳感器結構特性分為面陣相機與線陣相機兩種。由于自身工作原理的局限性,面陣CCD攝像機不適于連續、高精度對動態目標完成捕捉,而線陣CCD相機恰恰相反,其在機器視覺系統中一般用于被測物連續運動的場合,尤其適合運動速度較快、分辨率要求較高的情況,同時也能降低應用成本。因此,在隧道檢測車的設計中,鑒于采集圖像的精度要求和時間限制,選擇線陣相機[5]。
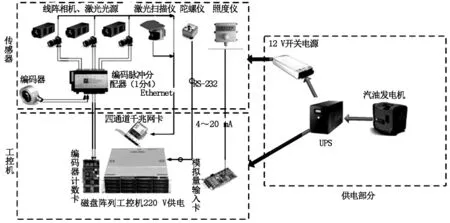
圖1 系統構架圖
隧道襯砌斷面是一個近似于半圓的形狀。一般來說,隧道斷面周長為20 m以內,為了獲取完整的隧道斷面圖像,以精度1 mm計算,需要相機擁有20 k的分辨率,這需要幾臺相機組合在一起同時拍攝。同時,考慮到拍攝過程中并不封閉隧道內交通,因此,檢測車在行進過程中不可避免旁邊會有其他車輛通過,這會對拍攝造成一定的影響。因此,本項目采用單次行進過程中只拍隧道半幅的方案,利用相關機械結構實現相機的翻轉,實現檢測車走左車道拍左半幅,反之亦然。此時只需要3臺4 k分辨率的相機即可滿足精度要求,降低了系統的整體成本。
1.2 光源系統
隧道內光照不均勻,且整體亮度較低。若想拍出理想的照片,保證裂縫等特征具有足夠的對比度,光源必須足夠亮。同時,在足夠亮的光照條件下,可將相機的感光參數調低,降低隧道中粉塵等顆粒物對照片的影響,減少噪點,使得圖片更加清晰。并且必須保證光源的均勻性,使拍出的照片整體亮度一致,以便于圖像的自動識別。
基于機器視覺的檢測系統中常用的照明光源有激光、鹵素燈、LED等。這幾種光源都有成熟的應用案例,但是需要根據公路隧道內的特定環境進行選擇。
鹵素燈發光效率高、顯色性好,但對于隧道內的裂縫等特征,采用8位或12位色深的灰度圖即可滿足要求,一般不需要彩色圖,因此其顯色性好的優點并不適用于隧道檢測。同時鹵素燈需要經常更換燈泡,使用成本高。
LED光源具有單色性好、壽命長、穩定性及均勻性好和亮度便于調節等特點,通過組合多個LED可以得到合適的照明條件。但若采用常亮的LED光源系統,為保證足夠的亮度,則整體功耗太高,會增加供電系統的成本。若采用高頻曝閃的方式,在高頻拍照時,LED光源曝閃頻率與拍攝頻率難以適配,會導致某些幀無法正常曝光。
激光光源亮度高,均勻性較好,功耗低,為常亮光源。可以通過光源鏡頭將光打成需要的形狀和范圍,具有良好的普適性。通過簡單的機械結構將線陣相機和光源進行配準,就可滿足使用要求。
綜上,采用激光光源作為本項目的照明系統。
1.3 定位系統
為了保證所拍攝的圖片尺寸與被拍攝物體的實際尺寸相對應,需要保證二維圖像兩個方向上的像素個數匹配實際尺寸。垂直于檢測車行進方向通過調整線陣相機的分辨率以及相機與隧道內壁的距離來調整實現;而行進方向上為了獲得連續完整的圖片,要求線陣相機所拍的幀幅數與檢測車的行進速度相匹配。在路面檢測車的應用中,通常采用安裝在汽車輪轂上的編碼器來進行車速匹配。
假設垂直于行進方向圖像分辨率為R(mm/像素),由于汽車輪轂與編碼器同軸固定,傳動比為1∶1,則:

式中:l為檢測車行進距離,m;f為編碼器一圈脈沖數,Hz;D 為輪胎直徑,m。
可以看出,R與f正相關。為了使拍出的圖片比例真實,則要求調整f以保證兩個方向上的圖像分辨率一致。因此,選擇可編程的增量型編碼器,通過調整編碼器分辨率,以適配不同圖像分辨率的需求。
由于只安裝一個編碼器,但要同時觸發3臺相機,為了保證3臺相機同步觸發,選用編碼器脈沖分配器將信號分為同步的3路信號對線陣相機進行觸發。同時通過數據采集卡將編碼器計數采集到計算機上,進行數據記錄,保證圖片與隧道內實際位置一一對應。
1.4 數據存儲
單個相機每秒數據量,以時速80 km/h,精度1 mm計算,相機像素為1×4 096。相機拍攝圖片為灰度點位圖,灰度等級256=28,則每個像素點占8位(1Byte),單個相機每次快門得到的圖片為4 096/1 024=4 KB。時速 80 km/h=2.23×104mm/s即所需拍攝頻率22.3 kHz。則每秒數據=4 KB×22.3 kHz≈90 MB。
為了保證如此大量的數據存儲,本項目采用RAID0結構的磁盤陣列工控機,提升了系統運行效率,保證采集圖像的完整存儲。
1.5 傳感器系統
由于人為駕駛原因,汽車時刻在隧道斷面中的位置不能保持一致,可能導致相機鏡頭與隧道內壁的距離不一致,鏡頭與隧道內壁的夾角不一致。使得拍攝出的圖片存在一定失真的情況。并且由于隧道為曲面,而拍攝圖片為平面,這就導致圖片中的特征(裂縫等)較實際偏小,這就需要利用隧道的輪廓信息進行修正。
圖2為通過激光掃描儀對隧道內壁的測量結果,可以獲取檢測車在行進時在隧道內的相對位置。由于相機、光源等部件相對于掃描儀的位置是固定不變的,根據相應機械結構的尺寸,也就知道了相機、光源與隧道內壁的距離和角度。
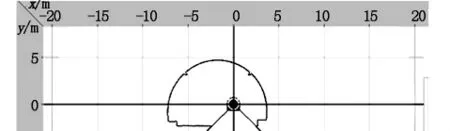
圖2 隧道內壁掃描儀測量結果
同時,利用陀螺儀、加速度計等傳感器可給出三軸方向上的線加速度和姿態角,實時測量汽車行進姿態,以便于后期圖像處理對由于汽車行進姿態引起的圖片變形進行調整。同時結合方向角與激光掃描儀測得的隧道斷面輪廓數據,可將隧道的實際三維輪廓描繪出來。
2 系統測試及結果
在實驗室內,根據上述硬件進行了組裝調試,并在隧道進行了實地測試。
2.1 測試確定的重要參數
a)確定了不同車速下(50~70 km/h)相機的最佳曝光時間以及所需感光度(使圖片亮度保持穩定)。
b)確定了相機的景深(指在攝影機鏡頭或其他成像器前沿能夠取得清晰圖像的成像所測定的被攝物體前后距離范圍)。
c)確定了相機放置的傾斜角度(防止拍攝物體反光導致過度曝光)。
圖3為通過將采集回來的圖像拼接起來的完整的隧道斷面圖,截取了其中50 m的長度。可以從圖中看出,通過該系統完成了對隧道襯砌斷面所有信息的采集,并且精度可達1 mm。

圖3 隧道斷面拼接圖像
2.2 試驗過程中存在的問題
a)編碼器在產生的積累誤差會使拍攝得到的圖片無法正確定位,影響后續的養護工作,需要研究加以消除。
b)需要結合熱紅外攝像機等其他類型的檢測設備,提升系統對隧道襯砌檢測的全面性。
3 結語
本文提出了隧道襯砌車載檢測系統的設計方案,并對其實施方法與工作原理進行了闡述。根據檢測任務需求,對系統的硬件設備選型依據進行了詳細的介紹。最終在實驗室進行了系統搭建,并且在隧道內進行了測試,初步達到了快速檢測的指標要求。對于遇到的問題,需要在后續試驗中改進和完善。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34