一種基于幅度和相位迭代重建的四維合成孔徑雷達(dá)成像方法
2016-10-29 06:35:20任笑真楊汝良
雷達(dá)學(xué)報(bào) 2016年1期
任笑真楊汝良
①(河南工業(yè)大學(xué)信息科學(xué)與工程學(xué)院 鄭州 450001)
②(中國(guó)科學(xué)院電子學(xué)研究所 北京 100190)
一種基于幅度和相位迭代重建的四維合成孔徑雷達(dá)成像方法
任笑真*①楊汝良②
①(河南工業(yè)大學(xué)信息科學(xué)與工程學(xué)院 鄭州 450001)
②(中國(guó)科學(xué)院電子學(xué)研究所 北京 100190)
4維合成孔徑雷達(dá)獲取的觀測(cè)數(shù)據(jù)在基線-時(shí)間平面非均勻分布。若采用傳統(tǒng)成像方法來(lái)獲取目標(biāo)散射體的高度-速率維像,則因強(qiáng)副瓣存在,成像效果不理想。當(dāng)信號(hào)具有稀疏性時(shí),壓縮感知技術(shù)能夠利用少量的信號(hào)投影值就可實(shí)現(xiàn)信號(hào)的準(zhǔn)確或近似重構(gòu)。然而標(biāo)準(zhǔn)的壓縮感知成像方法是針對(duì)實(shí)數(shù)據(jù)進(jìn)行處理,4維合成孔徑雷達(dá)成像處理的數(shù)據(jù)為復(fù)數(shù)據(jù)。因此該文提出了一種基于幅度和相位迭代重建的4維合成孔徑雷達(dá)成像方法。將4維合成孔徑雷達(dá)高度-速率成像問(wèn)題轉(zhuǎn)化為目標(biāo)復(fù)散射系數(shù)的幅度和相位聯(lián)合重建問(wèn)題,通過(guò)在成像過(guò)程中引入相位信息來(lái)改善成像質(zhì)量。仿真結(jié)果驗(yàn)證了該算法的有效性。
合成孔徑雷達(dá);4維;復(fù)數(shù)成像;壓縮感知
引用格式:任笑真, 楊汝良. 一種基于幅度和相位迭代重建的四維合成孔徑雷達(dá)成像方法[J]. 雷達(dá)學(xué)報(bào), 2016, 5(1):65-71. DOI: 10.12000/JR15135.
Reference format: Ren Xiaozhen and Yang Ruliang. Four-dimensional SAR imaging algorithm based on iterative reconstruction of magnitude and phase[J]. Journal of Radars, 2016, 5(1): 65-71. DOI:10.12000/JR15135.
1 引言
合成孔徑雷達(dá)具有全天候、全天時(shí)的對(duì)地觀測(cè)能力,已成為資源勘探、環(huán)境監(jiān)測(cè)和災(zāi)害評(píng)估的重要手段。差分干涉合成孔徑雷達(dá)技術(shù)利用不同時(shí)間獲得的同一成像區(qū)域的微波影像,通過(guò)統(tǒng)計(jì)分析,查找不受時(shí)間、空間基線去相關(guān)和大氣變化影響的點(diǎn)目標(biāo)來(lái)獲取地表形變信息,監(jiān)測(cè)建筑、冰川和斜坡的形變等[1,2]。然而差分干涉合成孔徑雷達(dá)假定成像區(qū)域同一個(gè)方位-距離分辨單元中只有一個(gè)主散射體,只能獲得地表變化的一個(gè)平均信息。對(duì)于存在高密度散射體的區(qū)域,例如城市地區(qū),大量的建筑,圍墻,人造目標(biāo)等表現(xiàn)為復(fù)雜的縱向結(jié)構(gòu),層疊效應(yīng)嚴(yán)重,此時(shí)一個(gè)像素接收的信號(hào)可能來(lái)自于多個(gè)散射體響應(yīng)的疊加,若采用單一散射體假設(shè)將導(dǎo)致某些散射體不能被監(jiān)測(cè),限制了差分干涉合成孔徑雷達(dá)對(duì)復(fù)雜構(gòu)造區(qū)域的監(jiān)測(cè)能力。
合成孔徑雷達(dá)4維成像技術(shù)是在差分干涉合成孔徑雷達(dá)基礎(chǔ)上發(fā)展起來(lái)的一種新型微波成像技術(shù),通過(guò)雷達(dá)平臺(tái)在不同時(shí)間和不同高度位置上對(duì)同一成像區(qū)域的多次平行觀測(cè),獲取目標(biāo)沿高度向和時(shí)間向的多次采樣信息,構(gòu)造對(duì)目標(biāo)觀測(cè)的高度向和時(shí)間向等效孔徑,從而能夠估計(jì)同一方位-距離分辨單元中不同散射體的高度和相應(yīng)的形變速率,具有方位-距離-高度-形變速率4維成像能力[3,4]。與采用單一散射體假設(shè)的差分干涉合成孔徑雷達(dá)相比,能夠最大限度地追蹤目標(biāo)數(shù)量,估計(jì)層疊散射體的相對(duì)形變,提高了對(duì)復(fù)雜散射體的監(jiān)測(cè)能力,可為高度-形變速率應(yīng)用領(lǐng)域的需求提供整體解決方案。
當(dāng)前技術(shù)條件下,合成孔徑雷達(dá)4維成像技術(shù)通過(guò)平臺(tái)在不同時(shí)間對(duì)同一區(qū)域的多次成像來(lái)實(shí)現(xiàn),不可避免地存在基線-時(shí)間數(shù)量少且分布不均勻的問(wèn)題。傳統(tǒng)頻譜估計(jì)方法受高度和時(shí)間基線影響,分辨率不高[5-8]。隨著壓縮感知理論的提出,稀疏信號(hào)處理在雷達(dá)成像領(lǐng)域受到了高度關(guān)注[9,10]。合成孔徑雷達(dá)4維成像所需要獲取的信息相對(duì)于整個(gè)觀測(cè)空間的信息來(lái)講,可看作是一個(gè)稀疏性較強(qiáng)的信號(hào)表示,滿足信號(hào)可壓縮性。因此基于壓縮感知的成像方法成為合成孔徑雷達(dá)4維成像領(lǐng)域的研究熱點(diǎn)。文獻(xiàn)[11]在層析合成孔徑雷達(dá)模型的基礎(chǔ)上,在相位信息中引入形變因子,將壓縮感知技術(shù)引入合成孔徑雷達(dá)4維成像,文獻(xiàn)[12]提出了一種基于貝葉斯壓縮感知的合成孔徑雷達(dá)4維成像方法。然而標(biāo)準(zhǔn)的壓縮感知成像方法是針對(duì)實(shí)數(shù)據(jù)進(jìn)行處理,合成孔徑雷達(dá)4維成像所處理的數(shù)據(jù)為復(fù)數(shù)據(jù)。因此本文提出了一種基于幅度和相位迭代重建的合成孔徑雷達(dá)4維成像方法,通過(guò)在成像過(guò)程中引入相位信息來(lái)改善成像質(zhì)量。仿真結(jié)果驗(yàn)證了該算法的有效性。
2 4維合成孔徑雷達(dá)成像原理
4維合成孔徑雷達(dá)成像幾何配置如圖1所示,x軸表示距離向,y軸表示方位向,r軸為斜距向。y和r構(gòu)成成像平面,s軸是與成像平面垂直方向。設(shè)載機(jī)在同一時(shí)間對(duì)同一成像區(qū)域航過(guò)M次,得到M幅合成孔徑雷達(dá)圖像,之后在不同時(shí)間對(duì)該成像區(qū)域共進(jìn)行N次上述操作,則共獲得MN幅合成孔徑雷達(dá)圖像。MN幅合成孔徑雷達(dá)圖像進(jìn)行精確配準(zhǔn)后,相同位置的像素點(diǎn)就對(duì)應(yīng)成像區(qū)域中同一點(diǎn),構(gòu)成一個(gè)長(zhǎng)度為MN的序列。將成像區(qū)域中任意一像素所對(duì)應(yīng)的序列按照獲得時(shí)的基線和時(shí)間進(jìn)行排列,得到一個(gè)M×N基線-時(shí)間分布矩陣,用H表示,其中hm,n表示第n個(gè)時(shí)間時(shí)第m次航過(guò)所獲得的2維合成孔徑雷達(dá)圖像數(shù)據(jù)。假設(shè)在成像區(qū)域(y′, x′)處有一散射源,沿s向分布,以平均速率v沿視線向運(yùn)動(dòng),N次時(shí)間間隔內(nèi)目標(biāo)運(yùn)動(dòng)不會(huì)超出它所在的分辨單元,則像素點(diǎn)(y′, r′)所對(duì)應(yīng)的2維合成孔徑雷達(dá)圖像數(shù)據(jù)可表示為[8]:

其中f(y, r)為合成孔徑雷達(dá)方位-斜距2維聚焦點(diǎn)擴(kuò)展函數(shù),γ(y, r, s, v)為成像場(chǎng)景雷達(dá)復(fù)散射系數(shù),λ為波長(zhǎng),Rm,n(r, s, v)表示第n個(gè)時(shí)間的第m次航過(guò)時(shí)雷達(dá)距目標(biāo)的距離:為平行于視線方向的基線分量,為垂直于視線方向的基線分量,tn表示第n次的時(shí)間,設(shè)t1= 0。
圖 1 4維合成孔徑雷達(dá)幾何配置示意圖Fig. 1 The system geometry of 4D SAR
由式(1)看出4維合成孔徑雷達(dá)的方位-斜距向成像與常規(guī)的合成孔徑雷達(dá)成像沒(méi)有區(qū)別,是成像場(chǎng)景在方位-斜距平面的2維映射。高度-速率維信息包含在式(1)的相位因子里。因此為簡(jiǎn)化分析,本文假定每次航行合成孔徑雷達(dá)都能實(shí)現(xiàn)理想的方位-斜距向2維聚焦,聚焦點(diǎn)擴(kuò)展函數(shù)f(y, r)為2維狄拉克函數(shù),將f(y, r)=δ(y)δ(r)代入式(1)可將4維合成孔徑雷達(dá)方位-斜距-高度-速率4維成像問(wèn)題轉(zhuǎn)化為高度-速率2維成像問(wèn)題。因此對(duì)于成像場(chǎng)景中任意一像素(y′, r′),雷達(dá)在第n個(gè)時(shí)間時(shí)第m次航過(guò)時(shí)所獲得的圖像數(shù)據(jù)可表示為:
其中2so表示成像場(chǎng)景高度范圍,2vo表示成像場(chǎng)景中散射源速率范圍。
由式(2)知hm,n的指數(shù)項(xiàng)存在2次相位誤差,將式(2)進(jìn)行去斜操作后,方位-斜距分辨單元(y′,r′)所對(duì)應(yīng)的2維合成孔徑雷達(dá)圖像數(shù)據(jù)可表示為:
由式(3)可知對(duì)于成像場(chǎng)景中任意一個(gè)固定的方位-斜距分辨單元,4維合成孔徑雷達(dá)獲得的M×N接收數(shù)據(jù)矩陣Y表示雷達(dá)散射強(qiáng)度在高度和速率方向的2維聯(lián)合譜,在基線和時(shí)間均勻采樣條件下,用2維傅里葉變換就可獲得滿意的結(jié)果。然而實(shí)際條件下,基線和時(shí)間數(shù)目都較少且采樣不均勻,導(dǎo)致傅里葉變換的效果嚴(yán)重惡化,旁瓣很高,應(yīng)選取合適的成像算法克服基線時(shí)間不均勻的影響。
3 基于幅度和相位迭代重建的4維合成孔徑雷達(dá)成像算法
由上面的分析知4維合成孔徑雷達(dá)成像可分為兩步。首先獲得所有航過(guò)的方位-斜距圖像,之后再對(duì)高度-速率維成像。由于方位-斜距成像與傳統(tǒng)的合成孔徑雷達(dá)成像一樣,因此本文僅對(duì)高度-速率維成像進(jìn)行分析。
3.14維合成孔徑雷達(dá)高度-速率維的信號(hào)模型
為簡(jiǎn)化分析,4維合成孔徑雷達(dá)高度-速率維的連續(xù)成像模型式(4)可離散化為:

其中Y=[ym,n]是一個(gè)M×N矩陣,其矩陣元素ym,n)是4維合成孔徑雷達(dá)系統(tǒng)獲得的M×N接收數(shù)據(jù)。R=[γ(pΔs,qΔv)]是一個(gè)P×Q矩陣, 其矩陣元素γ(pΔs,表示反射率系數(shù)γ(s, v)的離散采樣值,其中pΔs表示離散高度采樣位置,qΔv表示離散速率采樣位置。此外,B=[Bm,p]是一個(gè)M×P矩陣,T=[Tq,n]是一個(gè)Q×N矩陣,其中矩陣B和T的元素可由式(5)獲得
由上面的分析可發(fā)現(xiàn),4維合成孔徑雷達(dá)高度-速率維成像處理就是要重建反射率系數(shù)γ(pΔs,qΔv)。從式(6)可看出反射率系數(shù)γ(pΔs, qΔv)包含在矩陣R中,很難由式(6)直接獲得R的值,因此將式(6)重記為:

現(xiàn)實(shí)條件下,4維合成孔徑雷達(dá)系統(tǒng)每次只能獲得一條或有限的幾條基線。假設(shè)每次獲得的真實(shí)基線數(shù)是M′,此時(shí)可將真實(shí)接收的數(shù)據(jù)看做是從MN個(gè)總接收數(shù)據(jù)YM×N中萃取M′N個(gè)數(shù)據(jù)出來(lái)。因此,真實(shí)接收數(shù)據(jù)可表示為:

其中Θ=ΦΛ, n為噪聲。由式(12)可看出4維合成孔徑雷達(dá)高度-速率維成像就是重建目標(biāo)的復(fù)散射系數(shù)。由于4維合成孔徑雷達(dá)成像所需要獲取的目標(biāo)信息相對(duì)于整個(gè)觀測(cè)空間的信息來(lái)講,可看作是一個(gè)稀疏性較強(qiáng)的信號(hào),因此可利用稀疏重構(gòu)算法來(lái)獲取目標(biāo)像。
3.24維合成孔徑雷達(dá)成像算法
標(biāo)準(zhǔn)的壓縮感知成像方法是針對(duì)實(shí)數(shù)據(jù)進(jìn)行處理,由式(12)可看出4維合成孔徑雷達(dá)高度-速率維成像所處理的數(shù)據(jù)為復(fù)數(shù)據(jù)。若直接采用標(biāo)準(zhǔn)壓縮感知算法進(jìn)行處理,則忽略了目標(biāo)的相位信息。因此,這里我們將復(fù)散射系數(shù)向量記為[13,14]:



其中ε為任意小正數(shù)。
然而,實(shí)際上相位矩陣Ψ未知,我們必須在估計(jì)幅度圖像之前獲得相位值。為解決這個(gè)問(wèn)題,我們將復(fù)散射系數(shù)向量重記為:


上式可通過(guò)正則化技術(shù)求解,構(gòu)造代價(jià)函數(shù)

其中λ1為正則化系數(shù)。如果能夠獲得復(fù)散射系數(shù)向量的初始值,則相位向量P可通過(guò)求解下式獲得:
求解上述最優(yōu)化問(wèn)題可重新得到相位向量P的估計(jì),將新獲得的相位值代入Ψ=diag{(P)i}可對(duì)相位矩陣進(jìn)行更新,然后將更新后的Ψ代入式(15)可對(duì)復(fù)散射系數(shù)向量的幅度值進(jìn)行更新。因此本文所提出的4維合成孔徑雷達(dá)成像算法可描述為:
步驟2 將矩陣T代入式(19),獲得相位向量P,更新相位矩陣Ψ=diag{(P)i};
步驟3 將更新的相位矩陣Ψ代入式(15)獲得復(fù)散射系數(shù)向量的幅度值,更新矩陣T=diag{|γi|};
3.3幅度和相位重建方法
為從式(19)獲得相位向量P的解,用一個(gè)處處可微的函數(shù)對(duì)lq范數(shù)進(jìn)行近似

其中ε是一個(gè)任意小正數(shù)。
此時(shí)代價(jià)函數(shù)式(18)可重記為:
對(duì)J(P)求偏微分得
根據(jù)擬牛頓算法[13],相位向量P的迭代解可表示為:


其中λ2為正則化系數(shù),ε是一個(gè)任意小正數(shù)。對(duì)J(δ)求偏微分得

其中
根據(jù)擬牛頓算法[13],幅度向量δ的迭代解可表示為:當(dāng)兩次迭代滿足時(shí)迭代結(jié)束,其中ζ為足夠小正實(shí)數(shù)。

4 模擬仿真和性能分析
為了驗(yàn)證利用本文提出算法反演4維合成孔徑雷達(dá)高度-速率2維像的性能,本文進(jìn)行了數(shù)字仿真實(shí)驗(yàn)。以機(jī)載平臺(tái)合成孔徑雷達(dá)參數(shù)為例,設(shè)雷達(dá)工作在L波段,載頻1.3 GHz,載機(jī)飛行高度5000 m,載機(jī)與成像場(chǎng)景中心之間的地距為5000 m,基線長(zhǎng)度500 m,成像場(chǎng)景目標(biāo)高度最大不模糊范圍為40 m,目標(biāo)速率最大不模糊范圍為0.288 m/a,沿s方向有兩個(gè)散射點(diǎn),分別位于-2 m和2 m處,相應(yīng)的變化速率分別為0.02 m/a和-0.02 m/a,信噪比分別為10 dB。
假定載機(jī)每個(gè)固定時(shí)間對(duì)成像場(chǎng)景航過(guò)一次,得到一幅SAR圖像,不同時(shí)間共進(jìn)行25次實(shí)驗(yàn)。成像場(chǎng)景高度范圍為20 m,目標(biāo)速率范圍為0.2 m/a。適當(dāng)選擇各次載機(jī)航行的基線長(zhǎng)度,使其能夠盡可能分散填充基線-時(shí)間2維平面。不同時(shí)間獲得的基線分布如圖2所示。從圖2可看出4維合成孔徑雷達(dá)系統(tǒng)獲取的數(shù)據(jù)集是在基線-時(shí)間兩維空間稀疏分布,若直接對(duì)觀測(cè)數(shù)據(jù)進(jìn)行傅里葉變換來(lái)恢復(fù)目標(biāo)函數(shù),則因強(qiáng)副瓣存在,成像效果不佳。
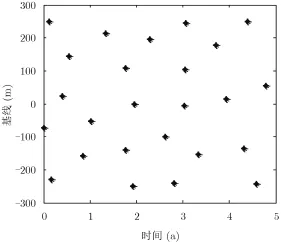
圖 2 載機(jī)在基線-時(shí)間平面的位置分布Fig. 2 The position distributions of 4D SAR in the baseline-time plane
為分析提出算法的性能,將傳統(tǒng)正交匹配追蹤算法和本文算法的重建結(jié)果進(jìn)行了對(duì)比。信噪比10 dB下利用傳統(tǒng)正交匹配追蹤算法獲得的高度-速率維重建結(jié)果如圖3(a)所示,信噪比10 dB下利用本文算法獲得的高度-速率維重建結(jié)果如圖3(b)所示,信噪比0 dB下利用傳統(tǒng)正交匹配追蹤算法獲得的高度-速率維重建結(jié)果如圖3(c)所示,信噪比0 dB下利用本文算法獲得的高度-速率維重建結(jié)果如圖3(d)所示。
仿真實(shí)驗(yàn)結(jié)果表明,傳統(tǒng)正交匹配追蹤算法和本文算法在高信噪比下均可獲得良好的目標(biāo)高度-速率維重建結(jié)果,兩個(gè)目標(biāo)的高度和速率信息均能很好地反映在圖像上。尤其是本文算法對(duì)旁瓣的抑制效果要好于傳統(tǒng)正交匹配追蹤算法。當(dāng)信噪比降為0 dB時(shí),傳統(tǒng)正交匹配追蹤算法獲得的重建結(jié)果中出現(xiàn)很多虛假目標(biāo),干擾了對(duì)真實(shí)目標(biāo)的判斷,而本文算法在低信噪比下能有效抑制虛假目標(biāo)影響,準(zhǔn)確估計(jì)真實(shí)目標(biāo)的高度和速率信息。
為驗(yàn)證本文算法對(duì)不同散射系數(shù)目標(biāo)的成像性能。我們進(jìn)行了仿真實(shí)驗(yàn)。假設(shè)某一方位-斜距分辨單元有3個(gè)散射點(diǎn),散射系數(shù)分別為3, 2和1,分別位于高度位置2 m, -2 m和2 m處,相應(yīng)的變化速率分別為-0.02 m/a, 0.02 m/a和0.02 m/a。并在接收數(shù)據(jù)中添加了方差為1的加性高斯白噪聲。傳統(tǒng)正交匹配追蹤算法獲得的高度-速率維重建結(jié)果如圖4(a)所示,本文提出算法獲得的高度-速率維重建結(jié)果如圖4(b)所示。從圖4可以看出,傳統(tǒng)正交匹配追蹤算法獲得的成像結(jié)果中弱目標(biāo)幾乎被噪聲所掩蓋,很難從噪聲中正確識(shí)別散射系數(shù)最小的目標(biāo),但是本文算法對(duì)不同散射系數(shù)的目標(biāo)仍然能夠正確重建。
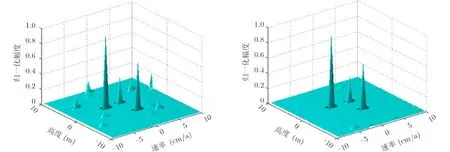
圖 4 不同散射系數(shù)目標(biāo)高度-速率重建結(jié)果比較Fig. 4 Comparison of the height-velocity reconstruction results of different scattering factors targets
本文算法需要進(jìn)行迭代來(lái)獲得最終的重建結(jié)果。為定量分析算法的收斂性能,我們給出了不同迭代次數(shù)下重建圖像與真實(shí)圖像之間的重建誤差來(lái)進(jìn)行定量分析。其中x^ 表示重建圖像,x表示真實(shí)圖像。圖5給出了不同迭代次數(shù)下的重建誤差曲線。從圖5可看出經(jīng)過(guò)很少的迭代次數(shù)后就可獲得滿意的重建效果。
5 結(jié)束語(yǔ)
合成孔徑雷達(dá)4維成像技術(shù)是傳統(tǒng)微波成像技術(shù)的擴(kuò)展,與采用單一散射體假設(shè)的差分干涉合成孔徑雷達(dá)相比,能夠最大限度地追蹤目標(biāo)數(shù)量,估計(jì)層疊散射體的相對(duì)形變,提高了對(duì)復(fù)雜散射體的監(jiān)測(cè)能力。在未來(lái)城市規(guī)劃、地表沉降、冰川和地下掩埋物探測(cè)等領(lǐng)域具有重要的應(yīng)用價(jià)值和巨大的應(yīng)用潛力。本文將4維合成孔徑雷達(dá)高度-速率成像問(wèn)題轉(zhuǎn)化為目標(biāo)復(fù)散射系數(shù)的幅度和相位聯(lián)合重建問(wèn)題,提出了一種基于幅度和相位迭代重建的4維合成孔徑雷達(dá)成像方法,通過(guò)在成像過(guò)程中引入相位信息來(lái)提高重建質(zhì)量。仿真分析表明,該方法在低信噪比下能有效抑制虛假目標(biāo)影響,改善成像質(zhì)量。
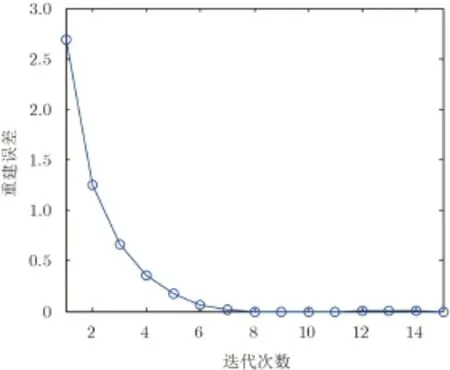
圖 5 不同迭代次數(shù)下的重建誤差曲線Fig. 5 Reconstruction error with varying iterations
[1]Morrison K, Bennett J C, and Nolan M. Using DInSAR to separate surface and subsurface features[J]. IEEE Transactions on Geoscience and Remote Sensing, 2013,51(6): 3424-3430.
[2]Fornaro G, D'Agostino N, Giuliani R, et al.. Assimilation of GPS-derived atmospheric propagation delay in DInSAR data processing[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2015, 8(2):784-799.
[3]Fornaro G, Reale D, and Serafino F. Four-dimensional SAR imaging for height estimation and monitoring of signal and double scatterers[J]. IEEE Transactions on Geoscience and Remote Sensing, 2009, 47(1): 224-237.
[4]Lombardini F. Differential tomography: a new framework for SAR interferometry[J]. IEEE Transactions on Geoscience and Remote Sensing, 2005, 43(1): 37-44.
[5]Reigber A, Lombardini F, Viviani F, et al.. Threedimensional and higher-order imaging with tomographic SAR: techniques, applications, issues[C]. IEEE International Geoscience and Remote Sensing Symposium (IGARSS),Milan, Italy, 2015: 2915-2918.
[6]Serafino F, Soldovieri F, Lombardini F, et al.. Singular value decomposition applied to 4D SAR imaging[C]. IEEE International Geoscience and Remote Sensing Symposium(IGARSS), Seoul, Korea, 2005: 2701-2704.
[7]孫希龍, 余安喜, 董臻, 等. 一種差分SAR層析高分辨成像方法[J]. 電子與信息學(xué)報(bào), 2012, 34(2): 273-278. Sun Xi-long, Yu An-xi, Dong Zhen, et al.. A high resolution method for differential SAR tomography[J]. Journal of Electronics & Information Technology, 2012, 34(2):273-278.
[8]任笑真, 楊汝良. 一種基于逆問(wèn)題的差分干涉SAR層析成像方法[J]. 電子與信息學(xué)報(bào), 2010, 32(3): 582-586. Ren Xiao-zhen and Yang Ru-liang. An inverse problem based approach for differential SAR tomography imaging[J]. Journal of Electronics & Information Technology, 2010,32(3): 582-586.
[9]Candes E J, Romberg J, and Tao T. Robust uncertainty principles: exact signal reconstruction from highly incomplete frequency information[J]. IEEE Transactions on Information Theory, 2006, 52(2): 489-509.
[10]Donoho D. Compressed sensing[J]. IEEE Transactions on Information Theory, 2006, 52(4): 1289-1306.
[11]Zhu X X and Bamler R. Sparse reconstruction techniques for SAR tomography[C]. 17th International Coference on Digital Signal Processing, Corfu, Greece, 2011: 1-8.
[12]Ren Xiao-zhen and Chen Li-na. Four-dimensional SAR imaging algorithm using Bayesian compressive sensing[J]. Journal of Electromagnetic Waves and Applications, 2014,28(13): 1661-1676.
[13]Cetin M and Karl W C. Feature enhanced synthetic aperture radar image formation based on non-quadratic regularization[J]. IEEE Transactions on Image Processing,2001, 10(4): 623-631.
[14]Samadi S, Cetin M, and Masnadi-Shirazi M A. Sparse representation-based synthetic aperture radar imaging[J]. IET Radar, Sonar & Navigation, 2011, 5(2): 182-193.

任笑真(1984-),女,河南偃師人,2010年7月獲得中國(guó)科學(xué)院電子學(xué)研究所通信與信息系統(tǒng)博士學(xué)位。現(xiàn)為河南工業(yè)大學(xué)副教授,碩士生導(dǎo)師,研究方位為合成孔徑雷達(dá)成像和信號(hào)處理。
E-mail: rxz235@163.com

楊汝良(1943-),男,云南昆明人,1965年畢業(yè)于電子科技大學(xué)雷達(dá)系,英國(guó)ABERDEEN大學(xué)工程系高級(jí)訪問(wèn)學(xué)者。現(xiàn)為中國(guó)科學(xué)院電子學(xué)研究所航天微波遙感系統(tǒng)部研究員、博士生導(dǎo)師,從事星載、機(jī)載合成孔徑雷達(dá)系統(tǒng)研究工作。
Four-dimensional SAR Imaging Algorithm Based on Iterative Reconstruction of Magnitude and Phase
Ren Xiaozhen①Yang Ruliang②①(College of Information Science and Engineering, Henan University of Technology, Zhengzhou 450001, China)
②(The Institute of Electronics, Chinese Academy of Sciences, Beijing 100190, China)
Observation data obtained from the Four-Dimensional (4D) Synthetic Aperture Radar (SAR) system is sparse and non-uniform in the baseline-time plane. Hence, the imaging results acquired by traditional Fourier-based methods are limited by high side lobes. Compressive Sensing (CS) is a recently proposed technique that allows for the recovery of an unknown sparse signal with overwhelming probability from very limited samples. However, the standard CS framework has been developed for real-valued signals, and the imaging process for 4D synthetic aperture radar deals with complex-valued data. In this study, we propose a new 4D synthetic aperture radar imaging algorithm based on an iterative reconstruction of magnitude and phase, which transforms the height-velocity imaging problem of 4D synthetic aperture radar into a joint reconstruction problem of the magnitude and phase of the complex-valued scatter coefficient. Using the phase information in the algorithm, the image quality is improved. Simulation results confirm the effectiveness of the proposed method.
Synthetic Aperture Radar (SAR); Four-Dimensional (4D); Complex-valued imaging; Compressive Sensing (CS)
s: The National Natural Science Foundation of China (61201390), The Key Scientific Research Project in Universities of Henan Province (16A510004), The Plan for Young Backbone Teacher of Henan Province (2015GGJS038)
TN958
A
2095-283X(2016)01-0065-07
10.12000/JR15135
2015-12-31;改回日期:2016-01-24;網(wǎng)絡(luò)出版:2016-02-03
任笑真 rxz235@163.com
國(guó)家自然科學(xué)基金(61201390),河南省教育廳科學(xué)技術(shù)研究重點(diǎn)項(xiàng)目(16A510004)和河南省高等學(xué)校青年骨干教師(2015GGJS038)
