GNSS動(dòng)態(tài)定位性能測(cè)試評(píng)估系統(tǒng)評(píng)價(jià)方法研究
2016-10-26 07:54:09叢佃偉信息工程大學(xué)導(dǎo)航與空天目標(biāo)工程學(xué)院地理信息工程國(guó)家重點(diǎn)實(shí)驗(yàn)室
衛(wèi)星與網(wǎng)絡(luò) 2016年8期
+ 叢佃偉 信息工程大學(xué)導(dǎo)航與空天目標(biāo)工程學(xué)院/地理信息工程國(guó)家重點(diǎn)實(shí)驗(yàn)室
GNSS動(dòng)態(tài)定位性能測(cè)試評(píng)估系統(tǒng)評(píng)價(jià)方法研究
+ 叢佃偉信息工程大學(xué)導(dǎo)航與空天目標(biāo)工程學(xué)院/地理信息工程國(guó)家重點(diǎn)實(shí)驗(yàn)室
定位性能是衛(wèi)星導(dǎo)航系統(tǒng)性能的基礎(chǔ)和核心,衛(wèi)星導(dǎo)航系統(tǒng)定位性能評(píng)價(jià)貫穿于衛(wèi)星導(dǎo)航系統(tǒng)的設(shè)計(jì)、研發(fā)、部署、運(yùn)行和擴(kuò)展等各個(gè)階段。目前GNSS動(dòng)態(tài)定位性能的評(píng)估常采用與靜態(tài)定位性能一樣的統(tǒng)計(jì)方法,論文針對(duì)GNSS動(dòng)態(tài)定位性能評(píng)價(jià)方法展開(kāi)研究,指出動(dòng)態(tài)定位性能評(píng)估與靜態(tài)定位性能評(píng)估的區(qū)別。采用測(cè)量不確定度理論研究GNSS動(dòng)態(tài)定位性能測(cè)試評(píng)估系統(tǒng)指標(biāo)確定方法,并依據(jù)測(cè)量不確定理論給出了我國(guó)北斗衛(wèi)星導(dǎo)航系統(tǒng)動(dòng)態(tài)定位性能評(píng)估系統(tǒng)應(yīng)具備的性能。論文研究工作對(duì)我國(guó)衛(wèi)星導(dǎo)航系統(tǒng)測(cè)試評(píng)估工作有借鑒意義。
全球?qū)Ш叫l(wèi)星系統(tǒng);動(dòng)態(tài)定位;測(cè)試評(píng)估;測(cè)量不確定度
定位性能是全球?qū)Ш叫l(wèi)星系統(tǒng)(global navigation satellite system,GNSS)的重要技術(shù)指標(biāo),也是衡量GNSS建設(shè)水平的重要標(biāo)志。動(dòng)態(tài)定位性能測(cè)試評(píng)估是衛(wèi)星導(dǎo)航系統(tǒng)性能測(cè)試評(píng)估的重要組成部分。
國(guó)內(nèi)外圍繞GNSS定位性能測(cè)試評(píng)估工作開(kāi)展了較多的理論研究、仿真實(shí)驗(yàn)與實(shí)際測(cè)試工作[1][2]。衛(wèi)星導(dǎo)航系統(tǒng)動(dòng)態(tài)定位、測(cè)速模式具有精度高、瞬時(shí)性、動(dòng)態(tài)范圍大、數(shù)據(jù)更新率高等特點(diǎn),這些特點(diǎn)給GNSS動(dòng)態(tài)定位性能測(cè)試評(píng)估帶來(lái)了巨大的挑戰(zhàn)。本文在研究現(xiàn)有評(píng)價(jià)方法基礎(chǔ)上,從計(jì)量學(xué)角度出發(fā)提出采用測(cè)量不確定度理論進(jìn)行GNSS動(dòng)態(tài)定位性能測(cè)試評(píng)估系統(tǒng)的指標(biāo)評(píng)價(jià),并給出了北斗衛(wèi)星導(dǎo)航系統(tǒng)(全球系統(tǒng))測(cè)試評(píng)估系統(tǒng)需具備的性能。論文方法研究對(duì)于我國(guó)北斗衛(wèi)星導(dǎo)航系統(tǒng)測(cè)試評(píng)估方法有重要借鑒意義。
一、目前常用GNSS動(dòng)態(tài)定位性能指標(biāo)評(píng)價(jià)方法
動(dòng)態(tài)定位性能一般定義為:在規(guī)定時(shí)間段內(nèi),服務(wù)區(qū)內(nèi)任一點(diǎn)的測(cè)量值與其準(zhǔn)確參考值之差的統(tǒng)計(jì)值。目前主要采用GNSS實(shí)時(shí)動(dòng)態(tài)差分(real-time kinematic,RTK)或動(dòng)態(tài)精密單點(diǎn)定位(precise point positioning,PPP)系統(tǒng)作為評(píng)估基準(zhǔn)[3][4]。
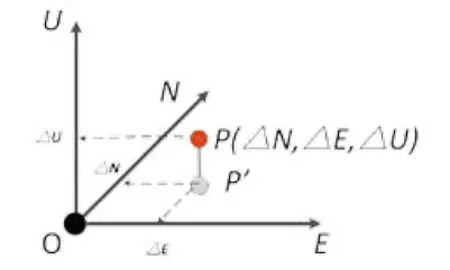
圖1 定位誤差計(jì)算示意圖
定位性能包括水平方向(EN)定位性能、高程方向(U)定位性能和三維(合成)定位性能。采用將GNSS接收機(jī)的動(dòng)態(tài)定位結(jié)果與評(píng)估基準(zhǔn)的動(dòng)態(tài)定位結(jié)果進(jìn)行比較求差,轉(zhuǎn)換到測(cè)站坐標(biāo)系,可以得到GNSS接收機(jī)在水平方向和高程方向的動(dòng)態(tài)定位偏差,在統(tǒng)計(jì)方法上習(xí)慣采用95%置信度或均方根(root mean squared,RMS)表示。如圖1所示,若將評(píng)估基準(zhǔn)獲得的動(dòng)態(tài)定位位置O點(diǎn)作為參考點(diǎn),P點(diǎn)為測(cè)得的GNSS接收機(jī)坐標(biāo),△N、△E、△U分別為接收機(jī)坐標(biāo)與評(píng)估基準(zhǔn)坐標(biāo)之差在站心坐標(biāo)系下北、東、天方向的差值。將常用的95%置信度和RMS統(tǒng)計(jì)方法如下:
(1)95%置信度統(tǒng)計(jì)方法
水平方向動(dòng)態(tài)定位性能評(píng)估量為:

高程方向動(dòng)態(tài)定位性能評(píng)估量為:

對(duì)待評(píng)估數(shù)據(jù)中所有歷元的水平定位誤差或高程定位誤差絕對(duì)值從小到大排序,取95%分位點(diǎn)處的數(shù)值作為95%置信度動(dòng)態(tài)定位性能。
(2)RMS值統(tǒng)計(jì)方法
設(shè)共有n個(gè)測(cè)量值,其與評(píng)估基準(zhǔn)值的誤差值為(Δ1,Δ2,Δ3......Δn),則均方根誤差表示為:
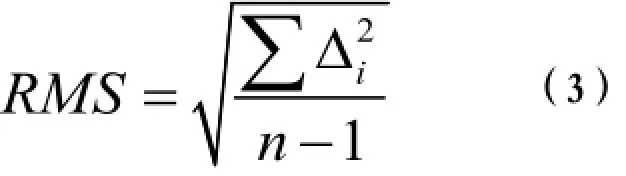
統(tǒng)計(jì)過(guò)程中還涉及粗差的判斷與剔除,粗差判定標(biāo)準(zhǔn)的差異也會(huì)影響評(píng)定結(jié)果。
二、基于測(cè)量不確定度理論的GNSS動(dòng)態(tài)定位性能指標(biāo)評(píng)價(jià)方法
1963年,測(cè)量不確定度理論被美國(guó)國(guó)家標(biāo)準(zhǔn)局(NBS)的Eisenhart提出。1993年,由國(guó)際計(jì)量局(BIPM)、國(guó)際標(biāo)準(zhǔn)化組織(ISO)、國(guó)際電工委員會(huì)(IEC)和國(guó)際法制計(jì)量組織(OIML)組成的工作組頒布了《測(cè)量不確定度表示指南》(GUM),隨后得到IUPAC、 IFCC、IUPAP三個(gè)國(guó)際組織的認(rèn)可,指南統(tǒng)一規(guī)定了術(shù)語(yǔ)定義、概念、評(píng)定方法和報(bào)告的表達(dá)方式,是當(dāng)前國(guó)際上表示測(cè)量結(jié)果及其不確定度的約定做法。測(cè)量不確定度的理論使不同學(xué)科、不同領(lǐng)域、不同國(guó)家、不同地區(qū)一致地表示測(cè)量結(jié)果及其不確定度。我國(guó)參考《測(cè)量不確定度表示指南》制定了國(guó)家計(jì)量技術(shù)規(guī)范《測(cè)量不確定度評(píng)定與表示》(JJF1059—1999),將其作為我國(guó)對(duì)測(cè)量結(jié)果和質(zhì)量進(jìn)行評(píng)定、表示和比較的統(tǒng)一準(zhǔn)則。下面研究利用不確定度理論來(lái)進(jìn)行GNSS動(dòng)態(tài)定位性能測(cè)試評(píng)估指標(biāo)評(píng)價(jià)。
根據(jù)《測(cè)量不確定度評(píng)定與表示》規(guī)范[5],標(biāo)準(zhǔn)不確定度是用標(biāo)準(zhǔn)偏差來(lái)表示的測(cè)量不確定度,標(biāo)準(zhǔn)(偏)差則可按照式(4)計(jì)算。
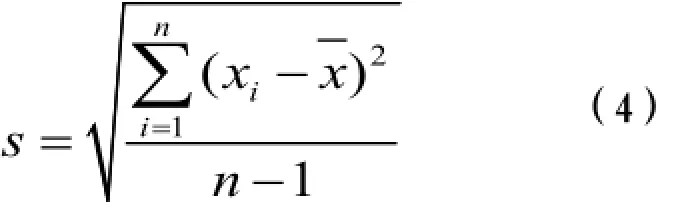
式(4)中,xi是對(duì)同一被測(cè)量進(jìn)行n次測(cè)量的第i 次測(cè)量的數(shù)據(jù),為n次測(cè)量結(jié)果的算術(shù)平均值,必須是在相同觀測(cè)條件下進(jìn)行的批量測(cè)量。式(4)與動(dòng)態(tài)定位性能評(píng)估中常用的RMS值統(tǒng)計(jì)方法式(3)一致,適用于GNSS動(dòng)態(tài)定位性能的靜態(tài)評(píng)估。
由于動(dòng)態(tài)定位性能評(píng)估的動(dòng)態(tài)特性,不能保證相同的觀測(cè)條件獨(dú)立地進(jìn)行n次測(cè)量,因此理論上式(4)不適用于GNSS動(dòng)態(tài)定位性能的評(píng)估。此時(shí)可采用標(biāo)準(zhǔn)不確定度A類(lèi)評(píng)定中的合成樣本標(biāo)準(zhǔn)差 sp的解釋?zhuān)瑢?duì)同一測(cè)量過(guò)程,可以利用核查標(biāo)準(zhǔn)的辦法,測(cè)量過(guò)程的合成樣本標(biāo)準(zhǔn)差 sp表示為式(5)。
式(5)中si是每一次核查時(shí)候的樣本標(biāo)準(zhǔn)差,k是核查次數(shù),在動(dòng)態(tài)定位性能評(píng)估試驗(yàn)中 k= 1,于是其標(biāo)準(zhǔn)不確定度如下式:
《測(cè)量不確定度評(píng)定與表示》中式(5)、式(6)的表述方法與測(cè)繪學(xué)科中以真誤差表述中誤差的概念一致[6],其描述為觀測(cè)值獨(dú)立等精度條件下的中誤差計(jì)算式,如式(7)所示。
式中Δi為觀測(cè)值與真值之差。
可以看出,利用真誤差表述的中誤差概念與《測(cè)量不確定度評(píng)定與表示》中式(3)的表述一致,該式與式(3)是有區(qū)別的。雖然當(dāng)樣本足夠大時(shí)式(6)與式(3)的結(jié)果差別會(huì)很小,但還是應(yīng)該從定義上區(qū)分GNSS動(dòng)態(tài)和靜態(tài)定位性能評(píng)估方法。
三、GNSS動(dòng)態(tài)定位性能測(cè)試評(píng)估系統(tǒng)所需指標(biāo)確定
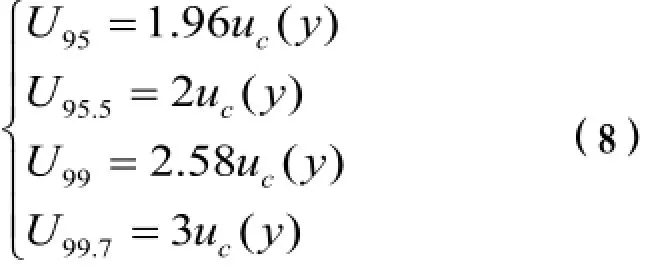
根據(jù)《測(cè)量不確定度評(píng)定與表示》規(guī)范[5],擴(kuò)展不確定度是用來(lái)確定測(cè)量結(jié)果區(qū)間的量,將合成標(biāo)準(zhǔn)不確定度) 乘以給定概率p 的包含因子為擴(kuò)展不確定度 Up,其表示期望在 y-Up至的區(qū)間內(nèi),以概率 p包含了測(cè)量結(jié)果的可能值。與 y的分布有關(guān)。當(dāng)可以按照中心極限定理估計(jì)接近正態(tài)分布時(shí),表示對(duì)于有效自由度以及與給定概率相應(yīng)的t分布的t值),一般采用的值為99%和95%,當(dāng)充分大時(shí)

從而分別得出:
當(dāng)y的分布不是正態(tài)分布時(shí),不確定度的描述方式較置信區(qū)間的概念更能反映測(cè)量數(shù)據(jù)中特大或特小誤差的影響。估計(jì)值y的值與其合成標(biāo)準(zhǔn)不確定度 uc(y ) 或擴(kuò)展不確定度 U最多為2位有效數(shù)字。
為了能夠?qū)Ρ倍沸l(wèi)星導(dǎo)航系統(tǒng)動(dòng)態(tài)定位性能進(jìn)行評(píng)估,動(dòng)態(tài)定位性能評(píng)估系統(tǒng)自身應(yīng)具備更優(yōu)的動(dòng)態(tài)定位性能,依據(jù)《通用計(jì)量術(shù)語(yǔ)及定義》對(duì)校準(zhǔn)測(cè)量能力的要求[7],用包含因子K為2的擴(kuò)展不確定度作為能夠提供的最高校準(zhǔn)測(cè)量水平,如條件允許可設(shè)定K為3。
因此,從計(jì)量學(xué)角度出發(fā),北斗動(dòng)態(tài)定位性能評(píng)估系統(tǒng)以擴(kuò)展不確定度指標(biāo)對(duì)北斗衛(wèi)星導(dǎo)航系統(tǒng)動(dòng)態(tài)定位性能進(jìn)行評(píng)價(jià),包含因子K的數(shù)值可以根據(jù)條件確定為2或者3。
四、北斗動(dòng)態(tài)定位性能評(píng)估系統(tǒng)指標(biāo)確定
如表1所示,我國(guó)依據(jù)95%置信度發(fā)布北斗衛(wèi)星導(dǎo)航系統(tǒng)區(qū)域系統(tǒng)定位性能指標(biāo)[8],當(dāng)北斗衛(wèi)星導(dǎo)航系統(tǒng)任意點(diǎn)位定位性能服從正態(tài)分布時(shí),依據(jù)式(8)可得到北斗衛(wèi)星導(dǎo)航系統(tǒng)定位合成標(biāo)準(zhǔn)不確定度與95%置信度的關(guān)系為:
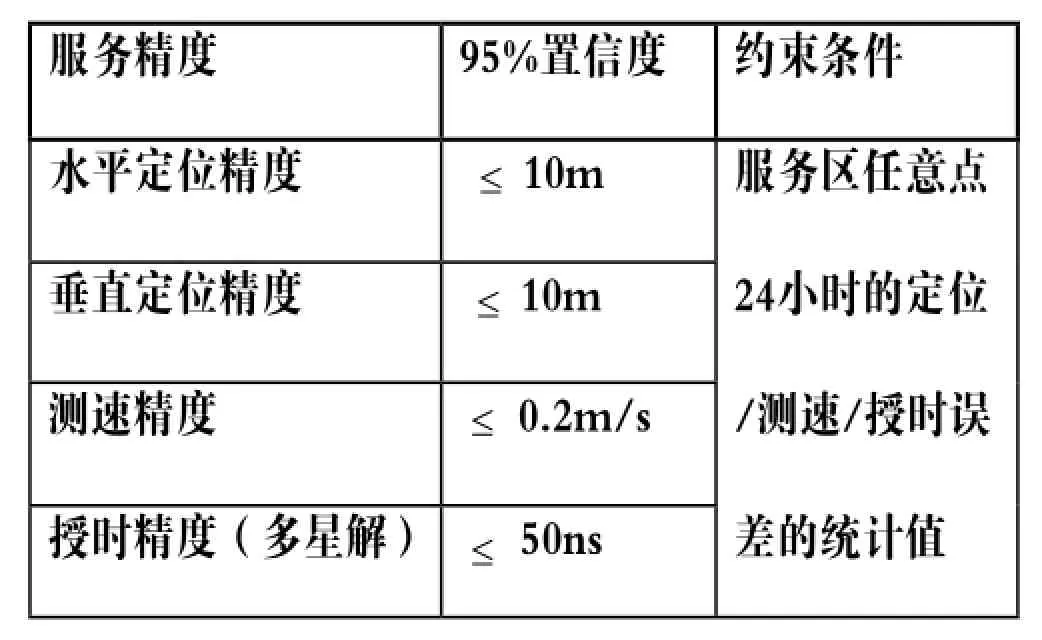
表1 北斗系統(tǒng)服務(wù)區(qū)內(nèi)公開(kāi)服務(wù)定位/測(cè)速/授時(shí)精度指標(biāo)
式(9)中uc( H) 代表北斗衛(wèi)星導(dǎo)航系統(tǒng)水平方向定位標(biāo)準(zhǔn)不確定度,uc( V )代表垂直方向定位標(biāo)準(zhǔn)不確定度。
根據(jù)對(duì)測(cè)量不確定度理論的分析,若用包含因子K =2的擴(kuò)展不確定度表示,此時(shí)動(dòng)態(tài)定位性能評(píng)估系統(tǒng)的不確定度要不大于北斗動(dòng)態(tài)定位不確定度的1/2,根據(jù)式(9)可計(jì)算得到動(dòng)態(tài)定位性能評(píng)估系統(tǒng)應(yīng)具備的性能為:
如條件允許,可設(shè)定K=3,此時(shí)可計(jì)算得到動(dòng)態(tài)定位性能評(píng)估系統(tǒng)應(yīng)具備的性能為:
2020年我國(guó)將要建成北斗衛(wèi)星導(dǎo)航系統(tǒng)全球系統(tǒng),其定位性能將比北斗衛(wèi)星導(dǎo)航系統(tǒng)區(qū)域系統(tǒng)有所提高,目前國(guó)家尚未公布具體定位性能設(shè)計(jì)指標(biāo)。假定北斗衛(wèi)星導(dǎo)航系統(tǒng)全球系統(tǒng)公開(kāi)位置服務(wù)指標(biāo)是水平方向、垂直方向定位性能分別為,當(dāng)包含因子K=2時(shí),根據(jù)式(9)可計(jì)算得到動(dòng)態(tài)定位性能評(píng)估系統(tǒng)應(yīng)具備的性能為:
考慮到高動(dòng)態(tài)條件下的高定位性能、高數(shù)據(jù)更新率技術(shù)的實(shí)現(xiàn)難度,如果北斗動(dòng)態(tài)定位性能評(píng)估系統(tǒng)的定位性能達(dá)到式(12)水平時(shí)(K=2)便可認(rèn)為具備GNSS動(dòng)態(tài)定位性能評(píng)估能力。即水平方向定位不確定度優(yōu)于1.0m,垂直方向定位的不確定度優(yōu)于1.5m。
GNSS動(dòng)態(tài)定位性能評(píng)估系統(tǒng)不僅需具備較高的定位性能,還應(yīng)具備一定的數(shù)據(jù)更新率,參考國(guó)內(nèi)外高動(dòng)態(tài)衛(wèi)星導(dǎo)航型接收機(jī)及板卡的性能指標(biāo),把數(shù)據(jù)更新率定義為不低于50Hz是合理的。
五、結(jié)束語(yǔ)
目前GNSS動(dòng)態(tài)定位性能的評(píng)估常采用與靜態(tài)定位性能一樣的方法,論文采用測(cè)量不確定度理論研究了GNSS動(dòng)態(tài)定位性能測(cè)試評(píng)估系統(tǒng)指標(biāo)確定方法,指出了動(dòng)態(tài)定位性能評(píng)估與靜態(tài)定位性能評(píng)估的區(qū)別,并依據(jù)測(cè)量不確定理論給出了我國(guó)北斗衛(wèi)星導(dǎo)航系統(tǒng)動(dòng)態(tài)定位性能評(píng)估系統(tǒng)應(yīng)具備的性能。論文研究工作是對(duì)GNSS動(dòng)態(tài)定位性能評(píng)價(jià)方法的探討,對(duì)我國(guó)衛(wèi)星導(dǎo)航系統(tǒng)測(cè)試評(píng)估工作有借鑒意義。
【國(guó)家自然科學(xué)基金資助項(xiàng)目(41604032)】
[1] 叢佃偉.北斗衛(wèi)星導(dǎo)航系統(tǒng)高動(dòng)態(tài)定位性能檢定理論與關(guān)鍵技術(shù)研究[D].鄭州:信息工程大學(xué),2016:6-15.
[2] TAYLOR R K, MDSE. Dynamic Testing of GPS Receivers[C]//ASAE Annual meeting.America,Kansas,
2003.
[3] 劉勇,宋志剛.GPS測(cè)量動(dòng)態(tài)定位精度驗(yàn)收方法研究[J].全球定位系統(tǒng),2005,(1):36-40.
[4] 雒喜平,向才炳,邊少鋒.GLONASS進(jìn)展及定位性能研究[J].測(cè)繪通報(bào),2012,(1):1-2.
[5] JJF1059-1999.測(cè)量不確定度評(píng)定與表示[S].北京:國(guó)家質(zhì)量技術(shù)監(jiān)督局,1999.
[6] 隋立芬,宋力杰,柴洪洲.誤差理論與測(cè)量平差基礎(chǔ)[M].北京:測(cè)繪出版社,2010:52-53.
[7] JJF1001-1998.通用計(jì)量術(shù)語(yǔ)及定義[S].北京:國(guó)家質(zhì)量技術(shù)監(jiān)督局,1998.
[8] 北斗衛(wèi)星導(dǎo)航系統(tǒng)空間信號(hào)接口控制文件-公開(kāi)服務(wù)信號(hào)(2.0版)[R].北京:中國(guó)衛(wèi)星導(dǎo)航系統(tǒng)管理辦
公室,2013.12.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45