衛(wèi)星導(dǎo)航系統(tǒng)接收機(jī)原理與設(shè)計
——之九(下)
2016-10-26 07:48:32劉天雄
衛(wèi)星與網(wǎng)絡(luò) 2016年8期
+ 劉天雄
衛(wèi)星導(dǎo)航系統(tǒng)接收機(jī)原理與設(shè)計
——之九(下)
+ 劉天雄
4.5基帶數(shù)字信號處理
4.5.8.4導(dǎo)航電文解碼
要成功解調(diào)出導(dǎo)航電文,接收機(jī)必須在信號跟蹤過程中實現(xiàn)位同步和幀同步。接收機(jī)利用延遲鎖定環(huán)DLL和頻率鎖定環(huán)FLL實現(xiàn)信號偽碼相位和載波頻率的精確估計,并動態(tài)地跟蹤導(dǎo)航信號多普勒頻移和測距碼相位的變化,成功實現(xiàn)比特同步之后,接收機(jī)就可以解調(diào)同步位信息和導(dǎo)航電文。
為了譯碼導(dǎo)航電文,接收機(jī)還需要對導(dǎo)航電文進(jìn)行幀同步和子幀同步處理,幀同步就是識別一個幀的起始和結(jié)束,同理子幀同步就是識別一個子幀的起始和結(jié)束。在比特同步之后只要識別出每幀的幀頭就可以很容易獲取導(dǎo)航電文中各個子幀在導(dǎo)航電文中的相對位置,當(dāng)幀同步和子幀同步之后,對導(dǎo)航電文進(jìn)行奇偶校驗,最后再按照電文結(jié)構(gòu)解讀每一項的內(nèi)容。
以GPS系統(tǒng)的導(dǎo)航電文為例,導(dǎo)航電文的基本單位是長1500 bit的一個主幀(Frame),一個主幀包括5個子幀(subframe),每一子幀都包含10個字(word),每個字長為30 bits,即每個子幀長300 bits。子幀1,2和3在每幀中重復(fù),子幀4和5有25種形式(同樣的結(jié)構(gòu),不同的數(shù)據(jù)),即1頁~25頁。導(dǎo)航電文的傳輸速率是50bit/ s,傳輸一個子幀需要6 Sec,傳送完畢一個主幀需要30 Sec,所以,傳輸一個完整的導(dǎo)航電文(25個主幀)需要750 Sec(12.5 minute)。
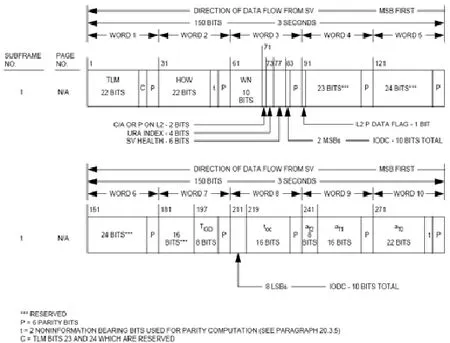
圖55 子幀1數(shù)據(jù)格式
GPS系統(tǒng)導(dǎo)航電文子幀1數(shù)據(jù)格式如圖55所示,每個子幀遙測字TLM(Telemetry Word)和交接字HOW(Hand Over Word)兩個特殊的字開始。遙測字TLM是每個子幀的第一個字(word 1),每6s重復(fù)一次,包括8 bit的幀頭(10001011),16 bit預(yù)留數(shù)據(jù)位(data)和6 bit奇偶校驗位(parity),其中幀頭用于幀同步,每個正確的幀頭都標(biāo)記了導(dǎo)航數(shù)據(jù)子幀的起始位置,主要作用是指明衛(wèi)星注入數(shù)據(jù)的狀態(tài),作為捕獲導(dǎo)航電文的前導(dǎo),是各子幀同步的起點。因此,在進(jìn)行電文子幀同步的時候,首先要搜索所獲取的導(dǎo)航電文中幀頭的位置,所搜索到的幀頭還有可能是調(diào)制數(shù)據(jù),為防止由此引起的誤搜索,然后對遙測字TLM 30 bit的數(shù)據(jù)進(jìn)行奇偶校驗檢查,然后再檢查對交接字HOW的30 bit的數(shù)據(jù)進(jìn)行奇偶校驗檢查,交接字奇偶校驗檢查通過后則可以提取出交接字的子幀ID號,正常子幀ID號是從1~5,上述所有檢查通過后則可以正確識別子幀幀頭的起始位置。
經(jīng)過子幀同步和奇偶校驗檢查后,就識別出了每一幀的起始和結(jié)束位,然后將未解碼數(shù)據(jù)送入譯碼器就可以讀取導(dǎo)航電文參數(shù)了,導(dǎo)航電文就是指包含衛(wèi)星星歷、衛(wèi)星歷書、系統(tǒng)時間、星載原子鐘改正參數(shù)、軌道攝動改正參數(shù)、電離層和對流層延遲改正參數(shù)、衛(wèi)星工作狀態(tài)、遙測碼以及有C/A碼確定P碼交換碼等二進(jìn)制編碼導(dǎo)航信息,導(dǎo)航電文是接收機(jī)定位解算的數(shù)據(jù)基礎(chǔ)。
GPS系統(tǒng)采用地心慣性坐標(biāo)系ECI描述衛(wèi)星開普勒6個軌道參數(shù),包括平均近地點M0、平均運動的校正值Δn、偏心率e、半長軸的平方根A1/2、升交點赤經(jīng)OMEGA0、軌道傾角i0、近地點幅角ω、升交點赤經(jīng)變化率OMEGADOT、軌道傾角變化率IDOT、對維度幅角余弦的校正值CUC、對維度幅角正弦的校正值CUS、對軌道半徑余弦的校正值CrC、對軌道半徑正弦的校正值CrS、對軌道傾角余弦的校正值CiC、對軌道傾角正弦的校正值CiS、星歷參考時間toe,GPS衛(wèi)星導(dǎo)航電文星歷參數(shù)定義如表1所示,
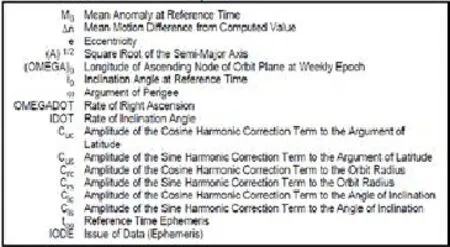
表1 GPS衛(wèi)星導(dǎo)航電文星歷參數(shù)定義
GPS系統(tǒng)導(dǎo)航電文子幀2和子幀3定義了上述星歷參數(shù)數(shù)據(jù)。Block II和IIA衛(wèi)星有效載荷的導(dǎo)航任務(wù)數(shù)據(jù)單元(MDU)至少存儲60天的導(dǎo)航電文,當(dāng)衛(wèi)星無法在星上計算機(jī)內(nèi)存中找到必需的有效控制或數(shù)據(jù)元素時,字3到字10中將交替?zhèn)鬏?和0來代替正常的導(dǎo)航數(shù)據(jù),這種默認(rèn)操作簡述如下:
(a)受影響的字的奇偶校驗將無效;
4.培養(yǎng)學(xué)生自學(xué)自練和終身體育鍛煉意識。在體育教學(xué)中,教師應(yīng)有計劃、有目的地創(chuàng)造必要的時間、空間與條件,放手讓學(xué)生獨立自主、生動活潑、主動積極地投身于體育鍛煉。
(b)字10的兩個尾比特將為0(使后面子幀的奇偶校驗有效);
(c)如果問題是缺一個數(shù)據(jù)元素,那么只有有直接關(guān)系的子幀將被這樣處理;
(d)如果一個控制元素?zé)o法被找到,默認(rèn)操作將應(yīng)用于所有的子幀,并且所有的子幀將在HOW中顯示正確的子幀ID。一旦在衛(wèi)星內(nèi)存中或上傳期間發(fā)生的控制元素失效,將導(dǎo)致衛(wèi)星發(fā)送非標(biāo)準(zhǔn)碼(NSC和NSY),表明導(dǎo)航信號不可用。
4.5.8.5基本觀測量生成Generation of Basic Observables
跟蹤電路在信號捕獲的基礎(chǔ)上利用頻率鎖定環(huán)(FLL)可以直接獲得多普勒頻率偏差,利用鎖相環(huán)(PLL)獲得信號瞬時相位估計值,并利用延遲鎖相環(huán)(DLL)估計的偽碼延遲數(shù)據(jù)計算衛(wèi)星和用戶接收機(jī)之間的偽距(pseudo-range)。
衛(wèi)星有星載時鐘,如果衛(wèi)星在時刻t0播發(fā)了調(diào)制有測距碼的導(dǎo)航信號,用戶接收機(jī)有本地時鐘,用戶接收機(jī)在本地時刻t1接收到衛(wèi)星信號,假設(shè)衛(wèi)星時鐘和接收機(jī)本地時鐘時間完全同步,那么通過計算這個時間差”t1-t0”就能知道導(dǎo)航信號的傳播時間Δt,導(dǎo)航信號的傳播時間乘以無線電信號的傳播速度就可以得到的衛(wèi)星與用戶機(jī)之間的距離,星地之間的距離觀測過程如圖56所示,
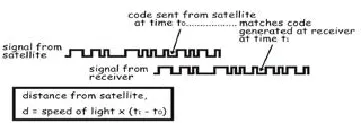
圖56 星地之間的距離觀測過程
衛(wèi)星m和用戶接收機(jī)之間的偽距計算公式可以表示為:

是以用戶接收機(jī)時鐘為基準(zhǔn)的導(dǎo)航信號的接收時刻,接收時刻含有相對于絕對時間基準(zhǔn)(例如GPS系統(tǒng)時)的誤差、導(dǎo)航信號傳播時延、接收設(shè)備時延以及熱噪聲;
是無線電導(dǎo)航信號的傳播速度,即光速。
因此,星地之間距離的測量實質(zhì)是測距碼信號從衛(wèi)星到接收機(jī)傳播時間(時延)的測量。
衛(wèi)星導(dǎo)航系統(tǒng)定位過程中存在三個時間系統(tǒng),用戶接收機(jī)的時間、導(dǎo)航衛(wèi)星的時間以及衛(wèi)星導(dǎo)航系統(tǒng)的參考時間,例如Galileo衛(wèi)星導(dǎo)航系統(tǒng)的時間參考系統(tǒng)為“GST”(Galileo System Time),GPS全球定位系統(tǒng)的時間參考系統(tǒng)為“GPST”(GPS Time)。三個時間系統(tǒng)之間必然存在偏差,因此根據(jù)導(dǎo)航信號的傳播時間得到的衛(wèi)星與用戶機(jī)之間的距離存在較大偏差,這也正是將測得的距離稱之為偽距的緣由,在代入導(dǎo)航方程求解前必須予以修正。
現(xiàn)實中用戶接收機(jī)時鐘不可能與衛(wèi)星星載原子鐘保持同步,衛(wèi)星采用高精度高穩(wěn)定度的原子鐘,而用戶接收機(jī)則采用一般精度的石英鐘,但這并不重要,也不需要同步,只需要知道用戶接收機(jī)時鐘與衛(wèi)星星載原子鐘之間的偏差即可,咱們可以把用戶接收機(jī)時鐘與衛(wèi)星星載原子鐘之間的偏差作為未知量來求解,最簡單的方法就是通過增加觀測衛(wèi)星數(shù)量在定位方程中統(tǒng)一解算。
地面運行控制系統(tǒng)采取星地雙向時間比對等技術(shù),通過定時修正每顆衛(wèi)星的時鐘,可以實現(xiàn)軌道上所有導(dǎo)航衛(wèi)星的時間與衛(wèi)星導(dǎo)航系統(tǒng)的時間保持一致,或者說做到完全同步。因此,上文的假設(shè)是成立的!
具體測量星地之間距離時,用戶接收機(jī)的時間可以預(yù)知,也可以假定一個具體的時刻,也就是說,只要知道導(dǎo)航信號發(fā)射的時刻就可以計算出偽距,即,關(guān)鍵環(huán)節(jié)是接收機(jī)在接收到導(dǎo)航信號的t1時刻必須知道衛(wèi)星是什么時刻 !
怎么辦呢?
事實上衛(wèi)星導(dǎo)航信號電文的編排使得信號播發(fā)流程中的任意點都有自己的準(zhǔn)確時間。一般情況下,衛(wèi)星導(dǎo)航用戶接收機(jī)利用接收到的每顆衛(wèi)星的時間歷元,外推以衛(wèi)星鐘為基準(zhǔn)的導(dǎo)航信號的播發(fā)時刻(實現(xiàn)星地時間同步),進(jìn)而得到導(dǎo)航信號的傳播時間,注意每顆衛(wèi)星都有一個獨立的PRN測距碼,基本概念如圖57所示。周內(nèi)秒計數(shù)TOW (Time Of Week)是衛(wèi)星導(dǎo)航系統(tǒng)導(dǎo)航衛(wèi)星播發(fā)導(dǎo)航信號的時間標(biāo)記(time stamp),時間標(biāo)記簡稱時標(biāo),時標(biāo)記錄在導(dǎo)航電文每個子幀的起始位置處。
以GPS系統(tǒng)L1頻點C/A碼信號為例,GPS系統(tǒng)導(dǎo)航電文的基本單位是長1500bit的一個主幀(Frame),一個主幀包括5個子幀(subframe),每個子幀有300個數(shù)據(jù)比特(data bit),每一個數(shù)據(jù)比特20ms,比特內(nèi)有20個C/A測距碼,每個C/A測距碼長度為1023個碼片(chip),碼片速率(Chipping rate)為1.023 Mcps,C/A測距碼信號周期是ms(約為1ms),每個碼片對應(yīng)時間1/1023 ms。在導(dǎo)航信號跟蹤過程中碼數(shù)控振蕩器(NCO)將每個碼片又進(jìn)一步分為若干部分,這部分分辨率的大小與NCO的字長有關(guān)。接收機(jī)的任意一個采樣時刻所采集到的衛(wèi)星信號都會有上述幾個不同部分,通過拼接后就能得到完整的衛(wèi)星信號在空間中的傳播時間了。由于不同接收機(jī)的設(shè)計會有差異,同時在電路處理過程中通常不是由一個環(huán)節(jié)來完成所有測量過程,這就出現(xiàn)了從某些單元或寄存器讀取數(shù)據(jù)再拼接的情形。信號比特位同步以及幀同步后,接收機(jī)外推導(dǎo)航信號的傳播時間過程如圖58所示。
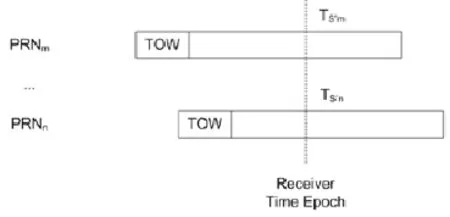
圖57 接收機(jī)外推導(dǎo)航信號傳播時間原理
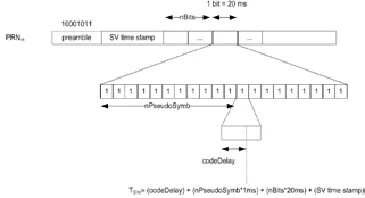
圖58 接收機(jī)實現(xiàn)星地時間同步后,外推導(dǎo)航信號的傳播時間
首先,根據(jù)導(dǎo)航電文的Z記數(shù)可以知道導(dǎo)航電文每一幀數(shù)據(jù)開始時對應(yīng)的全球定位系統(tǒng)的時間GPST,Z計數(shù)實際是一個時間計數(shù),它以每星期六/星期日子夜零時起算的時間計數(shù),給出下一幀開始瞬間的GPS時。由于傳輸一個子幀需要持續(xù)6 Sec,所以下一個子幀開始的時間為6XZ Sec,用戶接收機(jī)可以通過交接字將本地時間精確同步到GPS系統(tǒng)時間。
其次,幀同步后,我們對數(shù)據(jù)位、碼周期數(shù)、半個碼片滑動整數(shù)及小數(shù)部分分別進(jìn)行計數(shù),就可以精確地推算出接收到導(dǎo)航信號的t1時刻對應(yīng)的導(dǎo)航信號的發(fā)射時刻,計算公式如下:
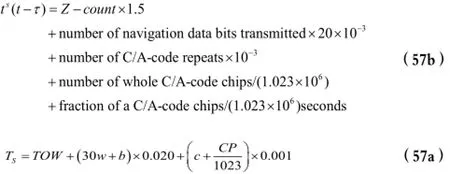
式中:TOW表示當(dāng)前子幀所對應(yīng)的周內(nèi)時計數(shù),w表示當(dāng)前子幀中接收到的字?jǐn)?shù),b表示當(dāng)前字中接收到的比特數(shù),c表示當(dāng)前比特中接收到的C/A碼周期數(shù),CP表示當(dāng)前周期內(nèi)碼相位測量值。Ts是以衛(wèi)星鐘為基準(zhǔn)的導(dǎo)航信號的播發(fā)時刻(單位為秒)。
小結(jié):
偽距的測量:在接收機(jī)的跟蹤狀態(tài)下,經(jīng)過數(shù)據(jù)解調(diào)后,讀取本地參考時鐘t1和衛(wèi)星時鐘的讀數(shù)t2的差,即為衛(wèi)星信號從衛(wèi)星到用戶的傳播時間Δt,偽距d=Δt·c
偽距變化率的測量:利用相鄰時刻間的多普勒頻率的變化以及載波的波長即可估計。
對基帶信號要經(jīng)過比特同步處理,以得到電文數(shù)據(jù)。電文數(shù)據(jù)還要幀同步和子幀同步,再經(jīng)過信道解碼糾正傳輸中出現(xiàn)的錯誤并去掉冗余數(shù)據(jù),對軍用電文可能還要進(jìn)行解密處理,才能得到導(dǎo)航電文中的有效數(shù)據(jù)。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(2015年3期)2015-11-11 17:20:00
創(chuàng)業(yè)家(2015年10期)2015-02-27 07:55:08
創(chuàng)業(yè)家(2015年10期)2015-02-27 07:54:39