面向海洋觀測的長續(xù)航力移動自主觀測平臺發(fā)展現(xiàn)狀與展望
2016-10-25 05:35:01陳質(zhì)二俞建成張艾群
海洋技術(shù)學報 2016年1期
陳質(zhì)二,俞建成,張艾群
(1.中國科學院沈陽自動化研究所,遼寧 沈陽 110016;2.中國科學院大學,北京 100049)
面向海洋觀測的長續(xù)航力移動自主觀測平臺發(fā)展現(xiàn)狀與展望
陳質(zhì)二1,2,俞建成1,張艾群1
(1.中國科學院沈陽自動化研究所,遼寧沈陽110016;2.中國科學院大學,北京100049)
海洋移動自主觀測平臺在海洋觀測技術(shù)中越來越為人們所倚重,發(fā)達國家相繼投入了大量的研究和部署。研究一種具有全天候、長續(xù)航力的海洋移動自主觀測平臺是當前一系列海洋裝備中的研究熱點和未來趨勢,尤其是最近5年,這項工作更是達到了新的高度。針對長續(xù)航力海洋移動自主觀測平臺的特征,文中將其分為長續(xù)航力自主潛航器系列和水下滑翔機系列兩大類,結(jié)合其共性問題分析了世界各國的研究現(xiàn)狀,并對其未來發(fā)展趨勢作了展望,最后簡要討論了這些平臺未來發(fā)展中的關(guān)鍵技術(shù)。
移動自主觀測平臺;自主潛航器;水下滑翔機;海洋觀測
海洋與人類生產(chǎn)、生活息息相關(guān)[1],全世界海洋面積占了地球總面積的71%,海洋蘊含著豐富的動、植物、礦產(chǎn)、石油、天然氣等資源,能夠提供人類日常生活所需要的一切。隨著工業(yè)化進程的飛速發(fā)展和人口的持續(xù)增長,人類對資源的需求也呈現(xiàn)一種爆炸式增長。眾多的自然災(zāi)害如臺風、海嘯、地震等都發(fā)源于海洋。除此之外,海洋也是人類軍事活動的重要場所。未來,隨著人類物質(zhì)生活水平的不斷提高,人類還將探險、旅游的腳步延伸到茫茫大海。因此,人類探索、認識、利用海洋的腳步從未停止[2]。海洋觀測技術(shù)是探索海洋、認識海洋、利用海洋的基礎(chǔ)。海洋觀測技術(shù)作為海洋科學技術(shù)的重要組成部分,在維護海洋權(quán)益、開發(fā)海洋資源、預(yù)警海洋災(zāi)害、保護海洋環(huán)境、加強國防建設(shè)、謀求新的發(fā)展空間等方面起著十分重要的作用,同時也是展示一個國家綜合國力的重要標志之一。發(fā)展海洋事業(yè),應(yīng)優(yōu)先發(fā)展海洋觀測技術(shù)[3]。
由于過去海洋觀測技術(shù)有限,因此海洋長期成為未被人類開發(fā)的領(lǐng)域之一。人類探索、認識、利用海洋的活動歷史很漫長,隨著社會需求的加大、科學技術(shù)的牽引以及軍事活動的助推,人類已將目光投向遠海,在這種背景下,各種長續(xù)航力海洋技術(shù)相關(guān)裝備應(yīng)運而生。近幾年隨著海洋觀測平臺技術(shù)推陳出新,人類逐漸熟知海洋,而海洋資源也正成為世界各國重要戰(zhàn)略目標。為爭奪海洋資源開發(fā)的制高點,美國、日本、印度等國家更是把海洋研究列為長遠發(fā)展計劃[4]。海洋觀測技術(shù)是中科院資源與海洋基地建設(shè)的重要任務(wù)。《海洋觀測預(yù)報管理條例》的公布標志著我國的海洋觀測事業(yè)進入了法制化軌道,是我國海洋觀測事業(yè)發(fā)展史上的一個里程碑,充分體現(xiàn)了當前我國對海洋事業(yè)的高度重視[5]。
當今海洋觀測技術(shù)主要包括天基、海基和水下三種[6]。天基海洋觀測是將航空和航天遙感技術(shù)應(yīng)用于海洋觀測的技術(shù)手段,這種觀測技術(shù)一般只針對海洋表面物理特征進行觀測。海基海洋觀測是一種基于海洋測量船、浮標以及潛標的觀測技術(shù),由于這類觀測平臺沒有空間上的自由度,因而觀測效率不高。人們普遍認為比較有前景的觀測技術(shù)是水下海洋觀測技術(shù),該技術(shù)引入了移動觀測平臺,提高了海洋觀測范圍和效率。隨著科技進步,移動觀測平臺越來越趨向智能化、小型化及低成本化,海洋移動自主觀測平臺具有這類特征。尤其是近5 a,人們對這種平臺的續(xù)航力有了更高的要求。續(xù)航力就是生命力,因此長續(xù)航力海洋移動自主觀測平臺成為了當前研究熱點。按照驅(qū)動方式的不同,該種平臺主要包括長續(xù)航力自主潛航器(Long-Range Autonomous Underwater Vehicle,LRAUV)、水下滑翔機(Glider),以及將螺旋槳驅(qū)動和浮力驅(qū)動結(jié)合起來的混合驅(qū)動水下機器人(Hybrid Driven Underwater Vehicle)。波浪滑翔機(Wave Glider)是近幾年自主水下機器人家族又一新成員,是海洋新能源利用的成功代表,并已廣泛用于海洋觀測,目前也是世界各國的研究熱點。以下內(nèi)容將詳細介紹當前這幾種海洋觀測平臺的發(fā)展情況并對其關(guān)鍵技術(shù)作了分析,以及未來發(fā)展作了展望。
1 發(fā)展歷史
1.1長續(xù)航力自主潛航器系列(LRAUVs)
長續(xù)航力自主潛航器系列的共性問題在于:能源供應(yīng)、低功耗電子設(shè)備與控制方法、推進方法、低阻外形設(shè)計、作業(yè)模式等方面。這些技術(shù)均是影響機器人續(xù)航能力的重要環(huán)節(jié),本節(jié)以下內(nèi)容就當前世界各國和我國研制的長續(xù)航力自主水下機器人的現(xiàn)狀進行簡要介紹。
由于水下移動自主觀測平臺搭載能源有限,因此利用海洋環(huán)境能作為機器人的能量供應(yīng)源成為當前研究熱點,其中太陽能AUV(SAUV)就是一種利用光伏技術(shù)將太陽能轉(zhuǎn)換為機器人可利用能源的具有長續(xù)航能力的自主水下機器人。1997年美國海軍研究局(ONR)研制了世界上第一代太陽能自主潛航器原理樣機(SAUVⅠ)。并在隨后的兩年由美國自主系統(tǒng)研究所對SAUVⅠ做了大量實驗工作。研究了海浪、溫度、生物吸附對太陽能電池板輸出特性和光電轉(zhuǎn)換效率的影響。并采用重心調(diào)節(jié)機構(gòu)取代傳統(tǒng)水平舵來實現(xiàn)機器人垂直面的姿態(tài)控制[7]。進入21世紀,太陽能AUV開始逐步從研究走向應(yīng)用。2003年,由美國海軍研究局(ONR)、美國自主水下系統(tǒng)研究所(AUSI)、FSI公司、TSI公司和美國海軍水下作戰(zhàn)中心聯(lián)合開發(fā)了第二代太陽能自主潛航器(SAUVⅡ)用于海洋遠程監(jiān)控和偵察任務(wù),如圖1所示。SAUVⅡ用于長期監(jiān)控、監(jiān)視、定位、與岸基和水下儀器進行實時雙向通信。機器人可預(yù)設(shè)下潛至500 m水深,可按指定路線航行,也可在合適的條件下上浮至水面利用太陽能充電。主要特征包括:續(xù)航時間長,可以數(shù)周或數(shù)月在海洋作業(yè),夜間執(zhí)行特定任務(wù),白天充電。航行速度可達3 kn。太陽能電源一次充電后能提供電能1 500 W·h。能維持定深、變曲線滑翔航行。為終端用戶載荷傳感器提供足夠的空間、能源、界面及軟件接口。傳感器測量的參數(shù)包括水深、高度、速度、姿態(tài)角以及各種動力參數(shù)。機器人的主體耐壓艙直徑為0.192 m、長度為1.1 m,殼體材料為玻璃纖維,殼體內(nèi)可以進水,內(nèi)有耐壓管用來搭載電子元器件以及一些可直接接觸海水的傳感器如高度計、深度計等。水平翼上方裝有兩個BP585太陽能面板,均為85 W高效單晶光伏模塊。翼的兩側(cè)裝有兩個高效矢量推進器。由該推進器與電機組合的驅(qū)動裝置峰值效率可達64%。機器人采用無線電(或銥星)雙向通信技術(shù)、GPS和慣導相結(jié)合的導航定位技術(shù)等[8]。如今,SAUVⅡ可提供大范圍,遠距離、長時問的海洋環(huán)境調(diào)查與監(jiān)測,為當今全天候、長航時、高時空密度海洋觀測需求提供了一種有力的工具。
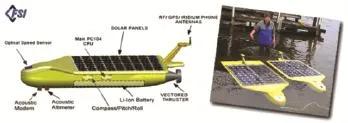
圖1 SAUVⅡ主體結(jié)構(gòu)圖
除了海洋環(huán)境能之外,一些新型燃料電池也促進了長續(xù)航力移動自主觀測平臺技術(shù)的發(fā)展。URASHIMA AUV在2004年由日本海洋—地球科學與技術(shù)中心(Japan Agency for Marine-Earth Science and Technology,JAMSTEC)成功研制[9],采用不依賴空氣的燃料電池作為能源,航行距離可達300 km。但是該AUV的最大缺點是體積大,長10 m重10 t的特點導致其難以建造、釋放和回收,而且燃料需要的氫氣極易發(fā)生爆炸。2005年,該AUV以創(chuàng)世界記錄317 km AUV航行距離完成海試。

圖2 URASHIMA AUV
除了利用海洋環(huán)境能作為機器人源源不斷的能量供應(yīng)源之外,采用低功耗電子設(shè)備和控制方法也是提高移動自主觀測平臺續(xù)航力的一種有效手段。Autosub Long Range AUV(簡稱Autosub LR)是Autosub系列AUV中最新的一項研究成果,由英國南安普頓國家海洋中心(NOC)研制[10],該AUV分別由兩個鍛造鋁球(前面一個搭載電池,后一個搭載控制器等電子設(shè)備)作為密封艙,推進器單獨密封,并通過磁耦合器連接螺旋槳[11],如圖3所示。載體重量650 kg,最大下潛深度6 000 m,續(xù)航時間為6個月,航行距離達6 000 km,巡航速度為0.4 m/s。系統(tǒng)中采用了先進的低功耗處理器和傳感器設(shè)備,使航行器的負載功耗非常低。這種航行器在無支持母船情況下可以為海洋學家提供海洋和海底觀測數(shù)據(jù),并且可以周期性浮出水面通過銥星通信將觀測數(shù)據(jù)發(fā)送給地面人員。該航行器具有斷電休眠并且周期性喚醒的能力,這種能力能為一些感興趣的科學任務(wù)提供機會,例如對局部海域的精細觀測。2011年1月在大西洋進行了第一次海試,結(jié)果驗證了該AUV具有較好的運動性能,定深精度為厘米級,艏向和俯仰角度控制精度均為0.5°。
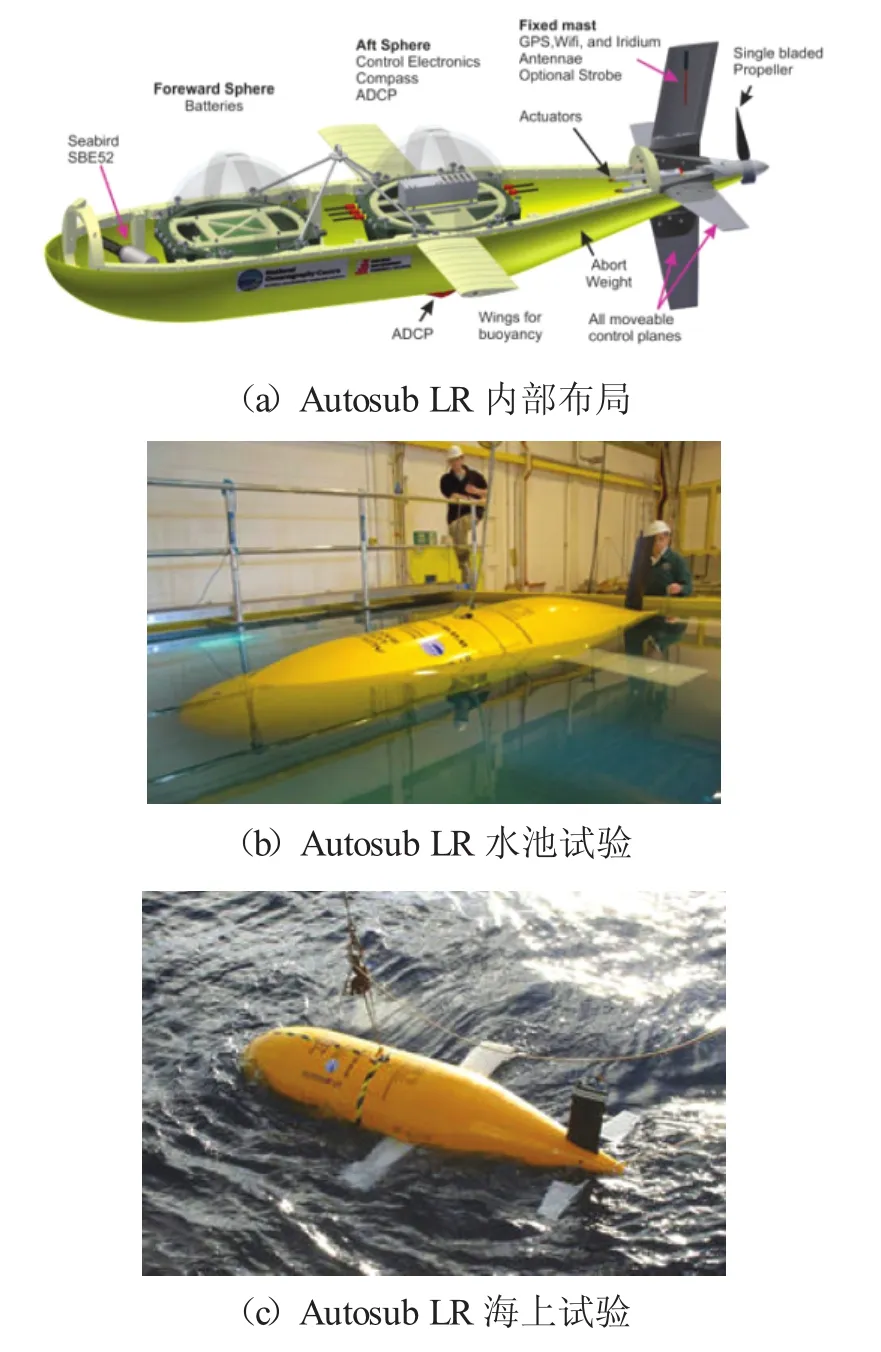
圖3 Autosub LR
推進器是移動自主觀測平臺的驅(qū)動裝置,結(jié)合流體力學知識和船用螺旋槳設(shè)計理論對機器人的型線優(yōu)化、槳-機-體匹配進行專門研究,從而得到機器人的最優(yōu)外形設(shè)計和高效推進裝置設(shè)計,達到提高機器人的續(xù)航力目的。Tethys AUV便是這樣一種長續(xù)航力AUV(圖4),該機器人由MBARI研制,可以在0.5 m/s和1 m/s兩種速度模式下航行,續(xù)航時間一個月,最大航行距離可達3 000 km,潛器重量120 kg,最大下潛深度300 m。主要是用來進行化學和生物測量,除了傳統(tǒng)的海洋特征觀測,由于具有超強的續(xù)航力,該潛器還可觀測浮游植物的生長繁殖過程,試驗證明了Tethys無論是在原位測量還是在水下采樣,是一個非常先進的水下生物觀測平臺,2009年進行了第一次海試[12]。

圖4 Tethys海試中
2013年由弗吉尼亞自主系統(tǒng)中心(Virginia Center for Autonomous System,VaCAS)提出[13],4 kn速度巡航時間35 h,但是布放時間可達1 a,最大潛深500 m。該AUV的最大特點是在其橢球形艏部加裝了一個真空吸附的錨定系統(tǒng),當AUV進入指定作業(yè)海域之后,AUV就會與錨定系統(tǒng)分離,并通過纜繩相連固定于海底指定位置進行觀測作業(yè),回收時拋棄錨定系統(tǒng),AUV通過螺旋槳驅(qū)動返回回收地點,如圖5所示。
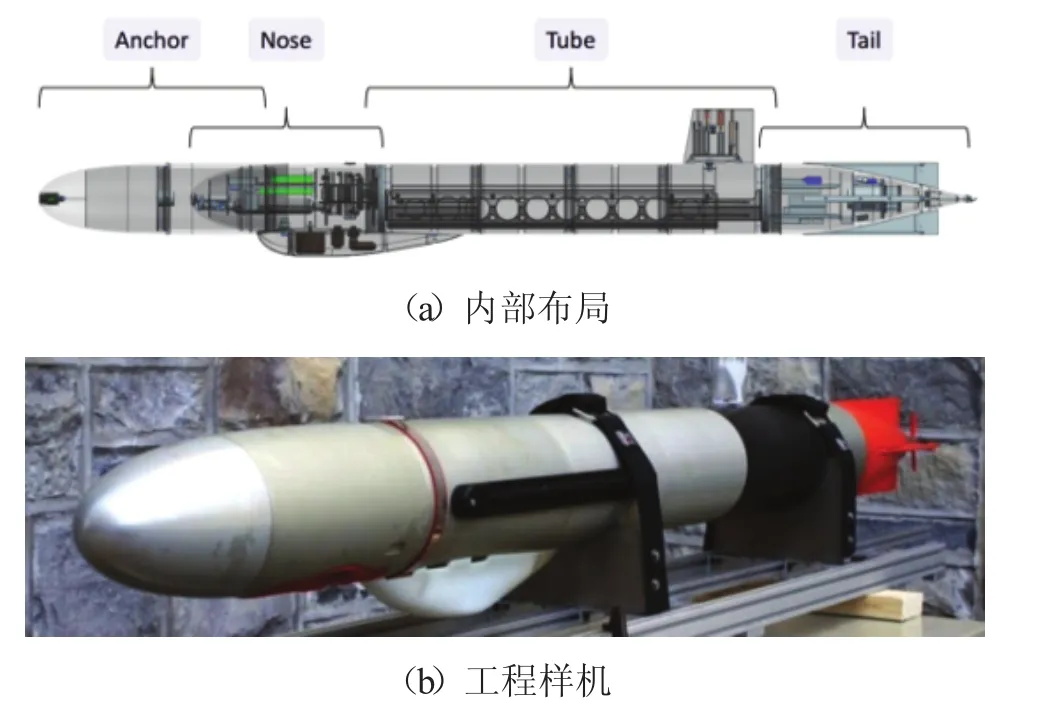
圖5 VaCAS研制的長續(xù)航力AUV
在加拿大國防部的支持下,ISE公司研制的長續(xù)航力自主水下機器人ISE Explorer AUV于2010年完成了長達10 d的冰下連續(xù)觀測任務(wù),在不回收情況下,航行距離累計超過了1 000 km,AUV充電和數(shù)據(jù)傳輸都在冰下完成[14]。
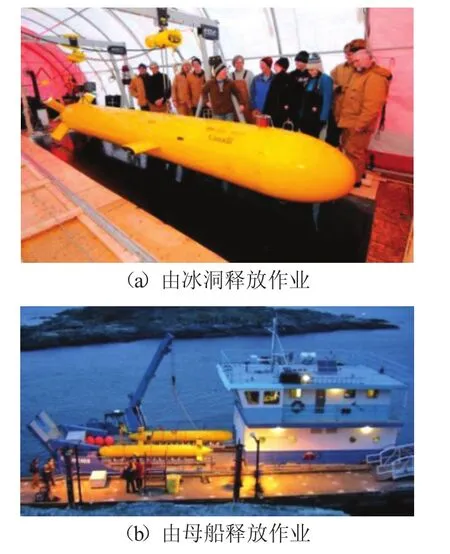
圖6 ISE Explorer AUV海上試驗
1.2水下滑翔機系列
從目前水下滑翔機的發(fā)展現(xiàn)狀來看,按照水下滑翔機的驅(qū)動方式可將其分為三類:即浮力驅(qū)動型水下滑翔機、浮力與螺旋槳混合驅(qū)動型水下滑翔機和波浪驅(qū)動型水下滑翔機。
1.2.1浮力驅(qū)動型水下滑翔機傳統(tǒng)水下滑翔機是依靠浮力變化作為驅(qū)動源,其作為一種新型的海洋環(huán)境水下觀測平臺,在國內(nèi)外都受到了極大的關(guān)注,開展了大量的研究工作,并已經(jīng)取得了一些研究成果。1989年美國人Stommel提出了采用一種能夠在水下作滑翔運動的浮標進行海洋環(huán)境調(diào)查的設(shè)想,這就是水下滑翔機的最初概念。1995年以來,在美國海軍研究局(ONR)資助下,美國先后研制出Slocum、Seaglider和Spray等多種以電池為能源的小型水下滑翔機[15],如圖7所示。這些水下滑翔機的重量都在50 kg左右,長度為2 m左右。2002年開始,美國華盛頓大學還開展了潛深為6 000 m的深海水下滑翔機研究工作,預(yù)計航行范圍可達8 500 km,續(xù)航時間達到380 d,目前該水下滑翔機已經(jīng)完成了部分海上試驗。2003年美國海軍開始支持大型翼型水下滑翔機的研究工作,圖8為美國研制成功的全翼型水下滑翔機。全翼型水下滑翔機的翼展為20 ft(約6.1 m),重量約為1 500 kg,最高時速可以達到3 kn,正常航行速度為1~3 kn,是當前世界上最大、航速最快的水下滑翔機。
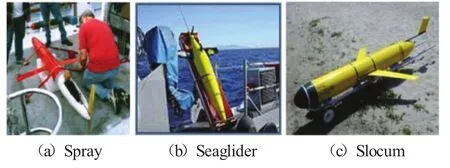
圖7 美國研制的水下滑翔機

圖8 美國研制的全翼型水下滑翔機
日本也是世界上較早開始水下滑翔機研究的國家,1993年就研制出了單滑翔周期的水下滑翔機ALBAC(圖9(a)),該水下滑翔機通過拋掉壓載的方式提供下潛和上浮的滑翔驅(qū)動力,一次下水只能完成一個滑翔周期。2008年,日本研究了碟形水下滑翔機BOOMERANG(圖9(b))和水平翼可旋轉(zhuǎn)的水下滑翔機ALEX(圖9(c))。碟形水下滑翔機直徑為1.9 m,高度為0.55 m,空氣中重270 kg。
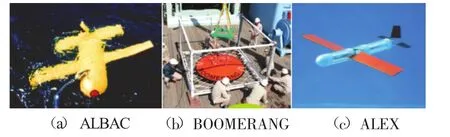
圖9 日本研制的水下滑翔機
2006年,美國華盛頓大學應(yīng)用物理實驗室開始研究開發(fā)了一種更大潛深的水下滑翔器Deepglider,其設(shè)計目標為潛深6 000 m,如圖 10(a)所示。至2007年3月,Deepglider只做了樣機開發(fā),其工作深度已經(jīng)可達2 700 m,實驗室4 000 m工作深度測試已經(jīng)成功[16]。
新西蘭的Otago大學電子研究實驗室正在開發(fā)和研究一種水下滑翔器UnderDOG。UnderDOG的設(shè)計工作深度為水下5 000 m,使用ARM-7處理器,用以測量海洋溫度、鹽度和含氧量,圖10(b)為UnderDOG的設(shè)計示意圖[17]。此外,法國、加拿大、韓國也都開展了與水下滑翔機相關(guān)的研究工作。
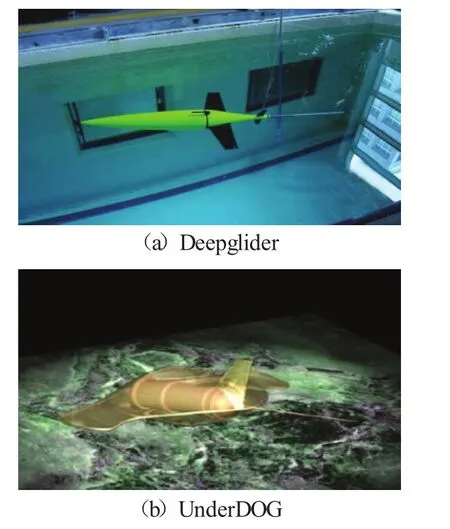
圖10 深水滑翔機
我國水下滑翔機相關(guān)研究工作起步較晚,2003年中國科學院沈陽自動化研究所開展了與水下滑翔機相關(guān)的基礎(chǔ)研究工作,2005年10月,成功研制出了中國第一臺水下滑翔機原理樣機Sea-Wing,解決了多模塊控制、模塊化結(jié)構(gòu)、光纖微纜應(yīng)用等一系列關(guān)鍵技術(shù),并順利進行了湖上試驗。從2007年開始在國家“863”計劃的支持下,中國科學院沈陽自動化研究所與中國科學院海洋研究所共同開展了水下滑翔機工程樣機的研制工作,2008年研制成功我國自主知識產(chǎn)權(quán)的水下滑翔機工程樣機,其身長2 m,直徑0.22 m,翼展1.2 m,重約65 kg,最大下潛深度1 200 m。如圖11所示。2009年組織完成了3次水下滑翔機海上試驗,取得了大量有價值的試驗數(shù)據(jù),積累了豐富的水下滑翔機海上作業(yè)經(jīng)驗。2011年以“科學一號”科考船為母船,成功進行了水下滑翔機的海上試驗,取得了十分寶貴的科學數(shù)據(jù)。在西太平洋超過4 000 m的水深中,水下滑翔機成功地完成了連續(xù)多次下潛,各項指標均表現(xiàn)正常,且在試驗完成后被成功回收。2012年7月,在南海東沙群島附近海域又成功進行了海試,進一步驗證了水下滑翔機系統(tǒng)的穩(wěn)定性和可靠性,積累了寶貴的水下滑翔機在復雜海流環(huán)境下的作業(yè)經(jīng)驗,為滑翔機的推廣和應(yīng)用打下了一定的基礎(chǔ)。2014年完成了水下滑翔機長航程試驗,續(xù)航時間達到1個月,航程達1 000 km,這是我國自主研制的水下滑翔機首次達到這一紀錄。2015年開始交付用戶,成為海洋科學家進行海洋觀測的一種重要手段。
大量的試驗結(jié)果表明,Sea-Wing水下滑翔機的運動機理、驅(qū)動原理和載體設(shè)計優(yōu)化等關(guān)鍵技術(shù)已經(jīng)得到解決。我國自主研制的水下滑翔機工程樣機技術(shù)指標接近國際同類產(chǎn)品水平,基本滿足實際應(yīng)用要求,目前我國已經(jīng)具備研制實用水下滑翔機裝備的能力。
此外,天津大學、西北工業(yè)大學、浙江大學、沈陽工業(yè)大學、上海交通大學、中船重工集團702研究所、中船重工集團710研究所、華中科技大學等單位也開展了一些與水下滑翔機相關(guān)的研究工作。

圖11 中科院沈陽自動化所研制的水下滑翔機工程樣機Sea-Wing
1.2.2浮力與螺旋槳混合驅(qū)動型水下滑翔機混合驅(qū)動水下滑翔機(Hybrid Driven Underwater Glider)是一種同時具有AUV和水下滑翔機特點的新型航行器,既可以水平航行,又可以沿鋸齒形軌跡滑翔航行,既具有AUV的高機動性,又具有水下滑翔機優(yōu)越的續(xù)航力。多重航行模式?jīng)Q定了其具有較強的海洋環(huán)境適應(yīng)能力。圖12為目前國外研制的部分混合驅(qū)動水下機器人。
2005年美國華盛頓大學APL實驗室提出了螺旋槳與浮力混合驅(qū)動的水下機器人設(shè)想,該航行器由浮力驅(qū)動水下滑翔機與獨立螺旋槳推進裝置兩部分組成的,其中螺旋槳推進裝置可以與水下滑翔機分離開,這樣就完全轉(zhuǎn)變成浮力驅(qū)動水下滑翔機。
2007年美國佛羅里達理工學院提出了一種混合驅(qū)動水下機器人構(gòu)想。該航行器在水平和垂直方向上分別安裝了兩個螺旋槳推進器,目前設(shè)計采用拋壓載和浮力材方式為滑翔運動提供驅(qū)動浮力,可實現(xiàn)10個滑翔周期。預(yù)期設(shè)計主要技術(shù)參數(shù)為:質(zhì)量為293 kg,尺寸為1.93 m長、1.59 m寬、0.58 m高,水平推進速度為2 kn。
Webb研究所的學者在Slocum滑翔機艉部安置了一個較大的高效率螺旋槳推進器,這樣就構(gòu)成了混合驅(qū)動的水下機器人Slocum AUV,該航行器的螺旋槳驅(qū)動工作時間占總時間的10%。
美國伍茲霍爾研究所研制出了一種用于近海岸的基于噴水推進器驅(qū)動、低造價、小重量的水下自航行器Fòl(fā)aga[18],該航行器可以在變浮力裝置作用下進行下潛上浮,利用噴水推進器實現(xiàn)前進和轉(zhuǎn)向。
2010年加拿大紐芬蘭紀念大學工程與應(yīng)用科學學院的Claus等學者研制出了一種基于可折疊螺旋槳驅(qū)動的混合驅(qū)動水下機器人[19-20],該航行器采用可折疊螺旋槳驅(qū)動裝置和浮力驅(qū)動裝置混合驅(qū)動,其中附加的螺旋槳驅(qū)動模塊能提高潛器的水平航行性能以及增大航行速度,在航速0.3 m/s時螺旋槳推進裝置能耗為0.6 W,航速0.67 m/s時能耗為4.25 W。
2012年法國ALCEN研制出了Sea Explorer,該航行器具有螺旋槳驅(qū)動和浮力驅(qū)動混合驅(qū)動、混合導航、無升降翼、續(xù)航力達數(shù)月、攜帶可充電電池等特點,主要用于環(huán)境調(diào)查、水質(zhì)監(jiān)測、搜救等方面。該航行器是首次采用聲學浮筒進行追蹤和監(jiān)控的水下滑翔機,不需要頻繁地浮出水面與地面通信,通過聲學設(shè)備即可完成通信任務(wù)。此外,通過改變載體艏部機構(gòu),即可快速方便地更換負載。配備的浮力和螺旋槳混合驅(qū)動裝置可根據(jù)作業(yè)需求實時調(diào)整和選擇工作模式,尤其是在淺水中能發(fā)揮優(yōu)勢。

圖12 國外研究人員研制的部分混合驅(qū)動水下機器人
此外,2011年美國VCT公司在美國海軍研究局(ONR)的資助下開發(fā)了一種低成本、可拋棄的滑翔機“xGlider”[21],這種航行器采用模塊化設(shè)計,可通過簡單改進升級為AUV,在AUV模式下航速能達到2 kn以上。它的最大特點是價格低廉,不超過5萬美元,相對于傳統(tǒng)滑翔機在結(jié)構(gòu)上去掉了水平翼,采用尾鰭裝置取代傳統(tǒng)滑翔機的橫滾、俯仰調(diào)節(jié)機構(gòu),因此成本大大降低。由于沒有水平翼,該航行器可從飛機或者潛艇進行釋放。根據(jù)客戶的需求其續(xù)航力能做到2個月至10個月不等,最大潛深為1 000 m。應(yīng)用主要面向軍方,用于水雷戰(zhàn)(MIW)和反潛戰(zhàn)(ASW)。由于這種航行器續(xù)航時間足夠長、成本很低,因此執(zhí)行完任務(wù)后可以不回收而選擇被拋棄。如圖13所示。

圖13 美國VCT公司研發(fā)的“xGlider”
2010年以來,國內(nèi)的中國科學院沈陽自動化研究所和天津大學也分別開展了混合驅(qū)動水下機器人研究工作[22-23]。沈陽自動化研究所提出了一種基于可折疊螺旋槳驅(qū)動裝置(圖14)的混合驅(qū)動水下機器人,該機器人具有3種航行模式:水平推進模式、滑翔航行模式以及混合驅(qū)動模式。可折疊螺旋槳在滑翔模式下處于槳葉折疊狀態(tài)以減小水動力阻力,在水平推進模式和混合驅(qū)動模式下,槳葉在離心力、水動力、復位裝置回復力三者共同作用下展開提供機器人前行所需的推力。2015年12月,成功進行了水池試驗,如圖15所示。
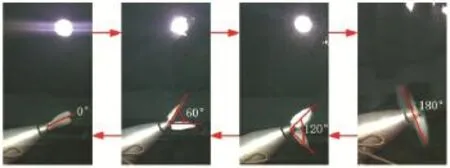
圖14 可折疊螺旋槳驅(qū)動裝置水池試驗

圖15 混合驅(qū)動水下滑翔機水池試驗
1.2.3波浪驅(qū)動型水下滑翔機美國的Roger Hine于2005年開始進行波浪滑翔機(Wave Glider)原理樣機的研究工作[24-25],由于該航行器利用波浪能轉(zhuǎn)化為前進的動能,因此續(xù)航力極強。目前Wave-Glider是Liquid Robotics Inc公司的主要產(chǎn)品,已經(jīng)面向客戶的不同應(yīng)用,通過搭載不同傳感器而出售,如圖16所示。并且該公司為了驗證波浪滑翔機的性能,進行了大量的海試實驗,如環(huán)繞美國西海岸的海試實驗,從美國西部的舊金山到夏威夷的海試實驗以及橫穿太平洋的實驗等,都取得了非常滿意的結(jié)果,獲得了大量的實驗數(shù)據(jù)。

圖16 Liquid公司研制的波浪滑翔機
國內(nèi)中國科學院沈陽自動化研究所也正在從事波浪滑翔機的研究工作[26],并研制出了多套波浪滑翔機原理樣機,多次成功進行了湖試和海試工作(圖17),目前關(guān)于波浪滑翔機的可控性、可操縱性以及運動建模、軌跡規(guī)劃等工作正在進行中。

圖17 中國科學院沈陽自動化研究所研制的波浪滑翔機
2 長續(xù)航力海洋移動自主觀測平臺未來展望
經(jīng)過多年的發(fā)展,世界各國在海洋觀測技術(shù)領(lǐng)域已經(jīng)成功開發(fā)了長續(xù)航力AUV、水下滑翔機、混合驅(qū)動水下滑翔機、波浪滑翔機以及其它水下移動觀測平臺。就單體開發(fā)技術(shù)而言,參與研究的科研單位越來越多,相關(guān)理論與技術(shù)也越來越成熟和先進。未來面向海洋觀測的長續(xù)航力海洋移動自主觀測平臺發(fā)展趨勢為:
(1)網(wǎng)絡(luò)化。隨著海洋移動自主觀測平臺應(yīng)用的增多,將會出現(xiàn)多個同種或不同種單體之間組網(wǎng)的協(xié)同作業(yè),共同完成復雜的任務(wù)。如地面的網(wǎng)絡(luò)系統(tǒng)一樣,自主水下機器人網(wǎng)絡(luò)化可以顯著提高包括海洋采樣、成像、監(jiān)視和通信在內(nèi)眾多面向海洋觀測應(yīng)用方面的能力,這將對“數(shù)字海洋”、“智慧海洋工程”建設(shè)起到重要作用。
(2)智能化。在控制和信息處理系統(tǒng)中,采用圖像識別、人工智能技術(shù)、大容量的知識庫系統(tǒng),以及提高信息處理能力和精密導航定位的隨感能力等。待這些技術(shù)得到解決后,自主水下機器人將成為名符其實的海洋智能機器人。
(3)多棲化。兩棲(水面、水下)、三棲(水面、水下、空中)自主水下機器人將出現(xiàn),融合天基、海基和水下等觀測技術(shù)優(yōu)點的新一代自主水下機器人將得到快速發(fā)展。
(4)長航程化。隨著要求調(diào)查范圍和作業(yè)時間的擴大,要求AUV能夠進行長航程作業(yè),如MBARI研制的Tethys AUV能實現(xiàn)4 000 km長距離連續(xù)數(shù)月巡航,可以勝任不同的海洋觀測任務(wù)。
(5)低成本化。由于面向海洋觀測的移動自主觀測平臺技術(shù)的成熟和不斷的推廣,以及在石油和天然氣等海洋工程方面的需求,自主水下機器人將會進入商業(yè)應(yīng)用的階段,為贏得市場,要求自主水下機器人必須走低成本道路。
(6)標準化和模塊化。自主水下機器人的標準化有助于加快機器人的開發(fā)周期,促進機器人的產(chǎn)品化,同時標準化將確保機器人與其它系統(tǒng)的互通性。標準化會促進機器人的模塊化,可以共享核心功能組件,減少軟硬件在不同機器人之間移植的成本和時間。
(7)低功耗化。機器人在水下工作時,搭載的各種探測設(shè)備和作業(yè)設(shè)備所需要的能源大部分都由自身所攜帶的電源供應(yīng),所以能耗決定了機器人的航行范圍和工作時間,而機器人體積有限,限制了所能攜帶的電池。除此之外,機器人的工作環(huán)境復雜,更換電池極為不便,因此降低功耗對機器人具有十分重要的意義。
3 長續(xù)航力海洋移動自主觀測平臺未來發(fā)展中的關(guān)鍵技術(shù)
由于長續(xù)航力海洋移動自主觀測平臺自身攜帶的能源有限,當機器人能量消耗完后,需要上浮到海面更換電源,然后再次下潛繼續(xù)任務(wù)。由于海洋環(huán)境十分復雜,更換電源十分不便,因此發(fā)展長續(xù)航力海洋移動自主觀測平臺具有十分重要的意義。目前,長續(xù)航力海洋移動自主觀測平臺主要面臨以下幾個關(guān)鍵技術(shù):電池性能改進、能源管理與分配方式改善、推進器效率提高、低阻外形設(shè)計、導航系統(tǒng)性能提升、系統(tǒng)集成方法改進。
4 結(jié)論
長續(xù)航力海洋移動自主觀測平臺對海洋觀測技術(shù)具有重要的意義。隨著人類探索海洋、認識海洋、利用海洋的活動進程不斷推進,這種平臺技術(shù)在該活動中將扮演著重要的角色。本文對長續(xù)航力海洋移動自主觀測平臺的現(xiàn)狀進行了調(diào)研,分析了該種平臺的發(fā)展趨勢及面臨的問題。相信隨著關(guān)鍵技術(shù)的不斷攻破,具有長續(xù)航力的海洋移動自主觀測平臺將在海洋開發(fā)中起到更加重要的作用。
[1]尹路,李延斌,馬金鋼.海洋觀測技術(shù)現(xiàn)狀綜述[J].艦船電子工程,2013,33(11):4-7.
[2]封錫盛,李一平,徐紅麗.下一代海洋機器人寫在人類創(chuàng)造下潛深度世界記錄10912米50周年之際 [J].機器人,2011,33(1): 113-118.
[3]朱光文.我國海洋觀測技術(shù)的現(xiàn)狀,差距及其發(fā)展[J].海洋技術(shù),1991,3(10):1-22.
[4]楊雅兆,邱意明,等.自主式水下無人載具技術(shù)研析[C]//第34界海洋工程研討論文集,國立成功大學,2012.
[5]劉賜貴.學習貫徹《海洋觀測預(yù)報管理條例》推動海洋觀測預(yù)報事業(yè)再上新臺階[J].海洋開發(fā)與管理,2012,29(6):19-21.
[6]李穎紅,王凡,任小波.海洋觀測能力建設(shè)的現(xiàn)狀,趨勢與對策思考[J].地球科學進展,2010,25(7):715-722.
[7]Jalbert J,Iraqui-Pastor P,Miles S,et al.Solar AUV Technology Evaluation Program[C]//Proceedings 10th International Symposium on Unmanned Untethered Submersible Technology,Autonomous Undersea Systems Institute,Durham,NH,1997.
[8]鄧小青.太陽能自主水下航行器[J].水雷戰(zhàn)與艦船防護,2012,1:026.
[9]YamamotoI,Aoki T,Tsukioka S,et al.Fuel Cell SystemofAUV"Urashima."[C]//Oceans'04 MTS/IEEE Techno-Ocean'04,2004.
[10]FromCoasttoDeep Ocean-MakingSense ofChangingSeas[EB/OL].http://noc.ac.uk/research-at-sea/nmfss/nmep/autosubs.
[11]Furlong M,Paxton D,Stevenson P.Autosub Long Range:A Long Range Deep Diving AUV for Ocean Monitoring[C]//Autonomous Underwater Vehicles(AUV),IEEE/OES,Southampton,2012.
[12]Monterey Bay Aquarium Research Institute.Long-Range Autonomous Underwater Vehicle Tethys[R/OL].http://www.mbari.org/auv/LRAUV.htm.
[13]Dan S.Long-endurance AUVCapabilities[R/OL].[2013-10-01]https://bts.fer.hr/_download/repository/Stilwell_Dan%5B1%5D.pdf.[14]BuildingAUVs Since 1984[R/OL].http://www.ise.bc.ca/auv.html.
[15]Leonard N,Graver J.Model-Based Feedback Control of Autonomous Underwater Glider[J].IEEE Journal of Oceanic Engineering,2001,26(4):633-645.
[16]王超,黃勝,解學參.基于CFD方法的螺旋槳水動力性能預(yù)報[J].海軍工程大學學報,2008,20(8)107-112.
[17]UnderwaterDeep Ocean Glider[EB/OL].2007.http://www.physics.otago.ac.nz/px/research/electronics/current-research-projects/underwater-deep-ocean-glider.
[18]Caffaz A,Caiti A,Casalino G,et al.31 The Hybrid Glider/AUV Folaga[J].IEEE Robotics&Automation Magazine,LEEE,2010,17(1):31-44.
[19]Claus B,Bachmayer R,Williams C D.Development of an Auxiliary Propulsion Module for an Autonomous Underwater Glider[J].Proceedings of the Institution of Mechanical Engineers,Part M:Journal of Engineering for the Maritime Environment,2010,224(4): 255-266.
[20]Claus B,Bachmayer R,Williams C D.Experimental Flight Stability Tests for the Horizontal Flight Mode of a Hybrid Glider[J].AUV 2010,2010.
[21]VCT Underwater Vehicles[EB/OL].http://www.vctinc.com/php/index.php?option=com_content&view=article&id=69:xglidertm& catid=37:xglider.
[22]Chen Z,Yu J,ZhangA,et al.FoldingPropeller Design and Analysis for a Hybrid Driven Underwater Glider[C]//OCEANS MTS/IEEE -San Diego,2013.
[23]Wang S,Sun X,Wang Y,et al.Dynamic modeling and motion simulation for a winged hybrid-driven underwater glider[J].China Ocean Engineering,2001,25:97-112.
[24]ManleyJ,WillcoxS.The Wave Glider:APersistent Platformfor Ocean Science[C]//OCEANS,MTS/IEEE,Sydney,2010.
[25]Hine R,Willcox S,Hine G,et al.The Wave Glider:A Wave-Powered Autonomous Marine Vehicle[C]//OCEANS,MTS/IEEE Biloxi,2009.
[26]田寶強,俞建成,張艾群,等.波浪驅(qū)動無人水面機器人運動效率分析[J].機器人,2014,36(1):43-48.
Overview on Observation-Oriented Unmanned Marine Vehicles with High Cruising Ability:Development Status and Prospect
CHEN Zhi-er1,2,YU Jian-cheng1,ZHANG Ai-qun1
1.Shenyang Institute of Automation,Chinese Academy of Sciences,Shenyang 110016,Liaoning Province,China;
2.University of Chinese Academy of Sciences,Beijing 100049,China
Unmanned marine vehicles(UMV)play an increasingly important role in marine observation technology.Many developed countries have invested considerable efforts and funds for the research and application of UMV.It is affirmed in this paper that a kind of UMV with all-weather and high cruising abilities is a hotspot and future highlight of marine equipment development,especially in the recent 5 years.According to the platform features,the UMV with high cruising ability can be divided roughly into two main classes:the longrange autonomous underwater vehicle(AUV)series and underwater glider series.This paper reviews the development history and status of UMV for marine observation at home and overseas combined with common problems,presents a prospect for their development trends,and briefly discusses the key technologies in UMV future development.
unmanned marine vehicle(UMV);autonomous underwater vehicle(AUV);underwater glider;marine observation
P715
A
1003-2029(2016)01-0122-09
10.3969/j.issn.1003-2029.2016.01.020
2015-10-22
國家自然科學基金資助項目(51179183)
陳質(zhì)二(1984-),男,博士研究生,助理研究員,主要從事水下機器人機構(gòu)設(shè)計與優(yōu)化問題研究。E-mail:chenze@sia.cn
