慣性導航位移參數在大地坐標系中的嚴密計算方法
2016-10-21 16:12:52宋韜梁海軍
電子技術與軟件工程 2016年9期
宋韜 梁海軍
【關鍵詞】GNSS/INS 組合導航 大地坐標系統 參考橢球 導航位移參數 嚴密算法
1 引言
為指引航空器按照預定航線以正確的飛行姿態抵達目的地,需要采用導航系統對其進行定位和航跡引導。而運用于航空器領域的導航系統必須適應遠距離航行及高速移動的特殊要求。
目前,民用航空領域多采用基于甚高頻全向信標和測距儀(VOR/DME)的陸基導航設備進行導航。陸基導航設備不能準確測量目標相對于導航臺的俯仰角,未將地球曲率對距離和航空器導航精度和空域資源的有效利用均受到陸基導航系統的限制。
具有全球性、高精度和全天候等特點的全球導航衛星系統(GNSS)和不依賴外界信息且受外界環境影響而降低精度,且在測量高速移動的目標時容易失鎖,從而影響導航的穩定性和連貫性;而 INS 為一種以牛頓運動定律為基礎,不接收外界信息,不向外輻射能量且不依靠外部參考基準的自主式導航系統。該導航系統通過各正交軸向的加速度傳感器進行自主定位。INS 幾乎不受自身運行狀態和外界環境的干擾,但缺少外部參考基準的特點,使其定位航要求。
上述兩種導航系統在導航方式和適用范圍上互相補充。因此,可以綜合利用兩種導航系統,將其導航數據進行融合,構成 GNSS/INS 組合導航系統,從而使 GNSS 導航電文易受干擾、易失鎖及 INS 導航精度隨著時間的推移而降低的問題得到解決。
對兩種導航系統基于不同坐標基準的導航參數進行精確數據融合是實現組合導航的關鍵問題之一。即將 INS 測得的在三個正交軸上的位移參數換算到 GNSS 所在大地坐標系參考橢球的大地經度、大地緯度和大地高上。從而使慣導系統的位移參數與大地坐標建立聯系,為之后的濾波分析和位置解算提供準確可靠的基礎數據。
2 慣導位移參數在近似正球體中的概略計算
2.1 衛星導航系統與慣導系統的測量基準
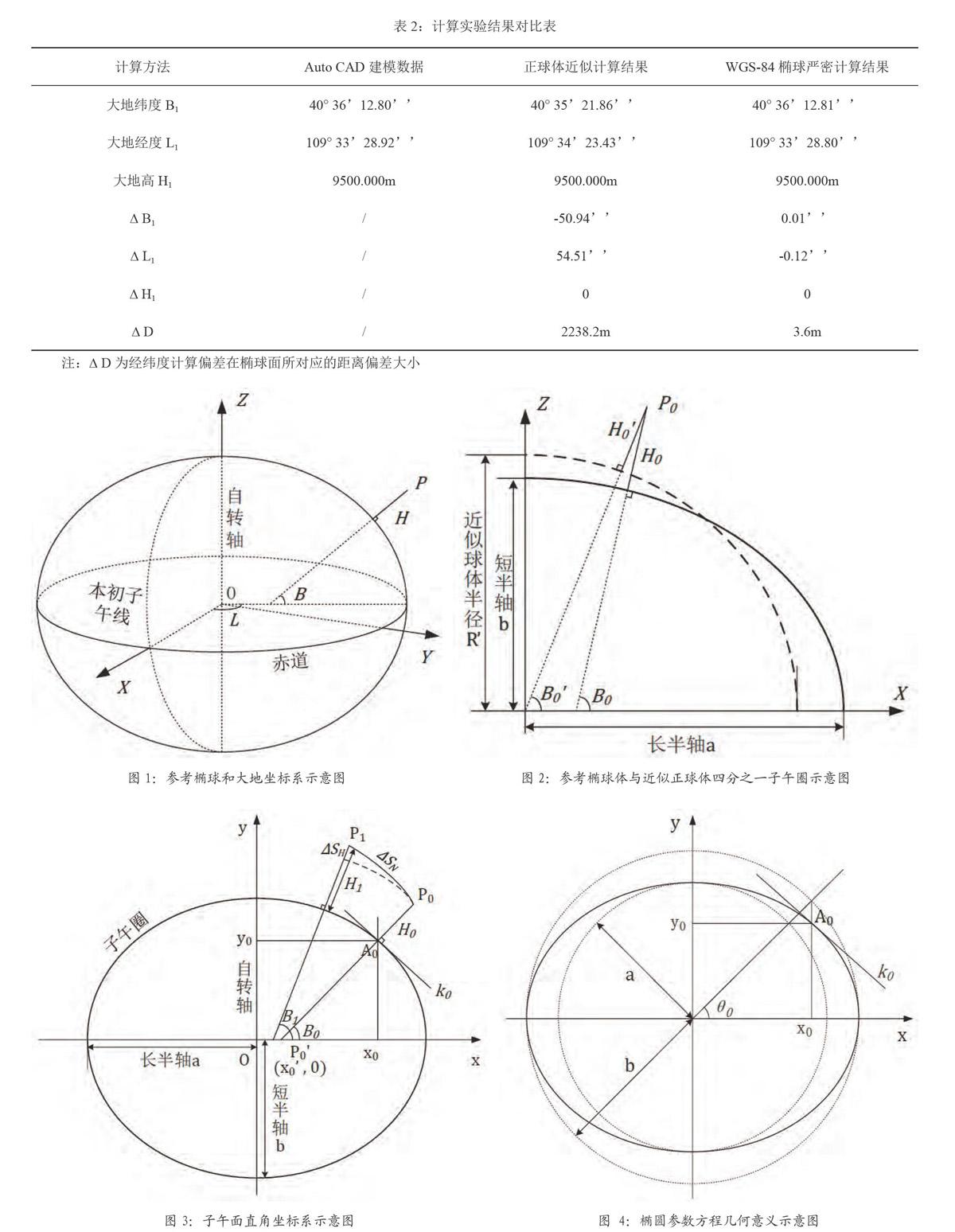
由于地球重力場的不均勻分布,使大地水準面所包圍的形體(大地體)呈現為兩級略扁的不規則球體,難以用數學公式嚴密表達。因此,在衛星導航中通常采用幾何中心與地球質心重合,以地球自轉軸為旋轉軸的旋轉橢球近似代替大地體,稱為參考橢球。而衛星的導航定位是以基于參考橢球的大地坐標系統為基準的,即:大地經度 L、大地緯度 B 和大地高 H(如圖 1 所示)。
而慣性導航系統根據慣性單元安裝部位和測量模式的不同,可分為平臺式與捷聯式兩種。
它們均利用三軸加速度計得到運動載體沿真北方向、鉛垂線方向及與兩者正交向東的第三個方向的瞬時加速度值,并利用牛頓運動定律換算為三軸位移參數進行累加計算定位。
2.2 基于近似正球體的位移參數概略計算
如上文所述,衛星導航系統與慣導系統的測量基準存在較大差別,而要想實現兩者的數據融合進行組合導航,就需要統一坐標基準。目前,針對 GNSS/INS 組合導航系統的導航參數轉換,通常將參考橢球近似看作半徑恒定的正球體進行計算。若已知初始定位點P0的大地坐標為(L0,B0,H0),慣導系統所得三個正交方向的位移參數分別為?SN、?SH、?SE,則基于近似正球體的大地坐標概略值計算式為:
在上式中,R′為參考橢球的近似球體半徑,介于赤道半徑與極半徑之間。
如圖 2,為參考橢球和近似正球體的四分之一子午圈示意圖。從圖中可知,同一點P0在參考橢球和近似正球體中的大地坐標存在一定偏差。近似計算方法思路簡便,算法復雜度低且易于程序實現,但忽略了衛星導航系統參考橢球中赤道半徑(橢球長半軸 a)與極半徑(橢球短半軸 b)之間存在約 21km 偏差的特點,故使得概略計算結果與真實情況存在差距。在對定位精度有較高要求,或在較長時間內無法使用全球導航衛星系統對慣導系統的定位結果進行校正時,這種近似計算方法難以得出精確可信的結果。
3 基于大地坐標系統的慣導位移參數嚴密算法
假設在參考橢球附近有一點P0為已知初始定位點,其大地坐標為(L0,B0,H0)。在經過時間?t后,到達P1點。根據慣導系統測得,由初始定位點P0到P1的過程中,沿真北方向、鉛垂線方向和與兩者正交向東的第三個方向的位移參數分別為:?SN、?SH、?SE,欲根據位移參數得到P1點相對于參考橢球的精確大地坐標(L1,B1,H1)。
3.1 大地緯度方向位移量的計算
如圖 3 所示,為參考橢球子午面直角坐標系示意圖。其中,子午面坐標系xOy是以地球質心O為原點,地球自轉軸為y軸,x軸位于初始定位點P0所在子午面的平面直角笛卡爾坐標系。圖中橢圓代表經過P0點的子午圈。
由已知條件,在子午面直角坐標系中,從P0到P1,物體沿著與子午圈平行的路徑向真北方向的位移量為?SN(如圖 3),則未知點P1的大地緯度計算方法推導如下:
設初始定位點P0沿參考橢球法線方向與橢球面的交點為A0,它在子午面直角坐標系中的坐標為(x0,x0)。根據橢圓參數方程(如圖 3 所示),該點坐標值表示如下:
(1)
上式中,a、b分別為參考橢球參數中的長半軸與短半軸,θ0為角度參數,其幾何意義如圖 4 所示。
過點A0作子午圈的切線,該切線斜率K0和該點處法線斜率(點P0緯度正切值)tan B0計算分別如下所式所示:
通過(3)式即可得A0點大地緯度B0和對應的子午圈橢圓參數方程中的角度參數θ0之間的關系:
根據(1)式與(4)式可得P0在參考橢球面的投影點A0在子午面平面直角坐標系的坐標(x0,y0)。
從而根據過A0點的法線方程,計算得到法線在子午面平面直角坐標系中的x軸截距x0′(如圖 3):
因此,在參考橢球上,初始點P0沿法線方向到赤道面的距離DP0P0′為:
A0處的子午圈橢圓曲率半徑計算式如下:
為求得點P1的緯度概略值B10作為迭代計算的初始值,將子午圈橢圓近似看作半徑為RA0的正圓,則B10計算式如下:
此時,根據弧長曲線積分,得此時沿真北方向的實際位移量為:
其中,θ10為P1點概略緯度所在位置對應的橢圓參數方程角度參數。根據(3)式得θ10計算式如下:
根據定位精度要求,設定迭代閾值ε,作為實際位移量與實測位移量的容許偏差,若:
則重新計算未知點P1的緯度概略值:
迭代計算(8)到(10)式,直至|?SN0 -?SN| ≤ ε為止,即可得到滿足容許偏差要求的未知點P1的大地緯度精確值B1。
3.2 大地經度與大地高方向位移量的計算
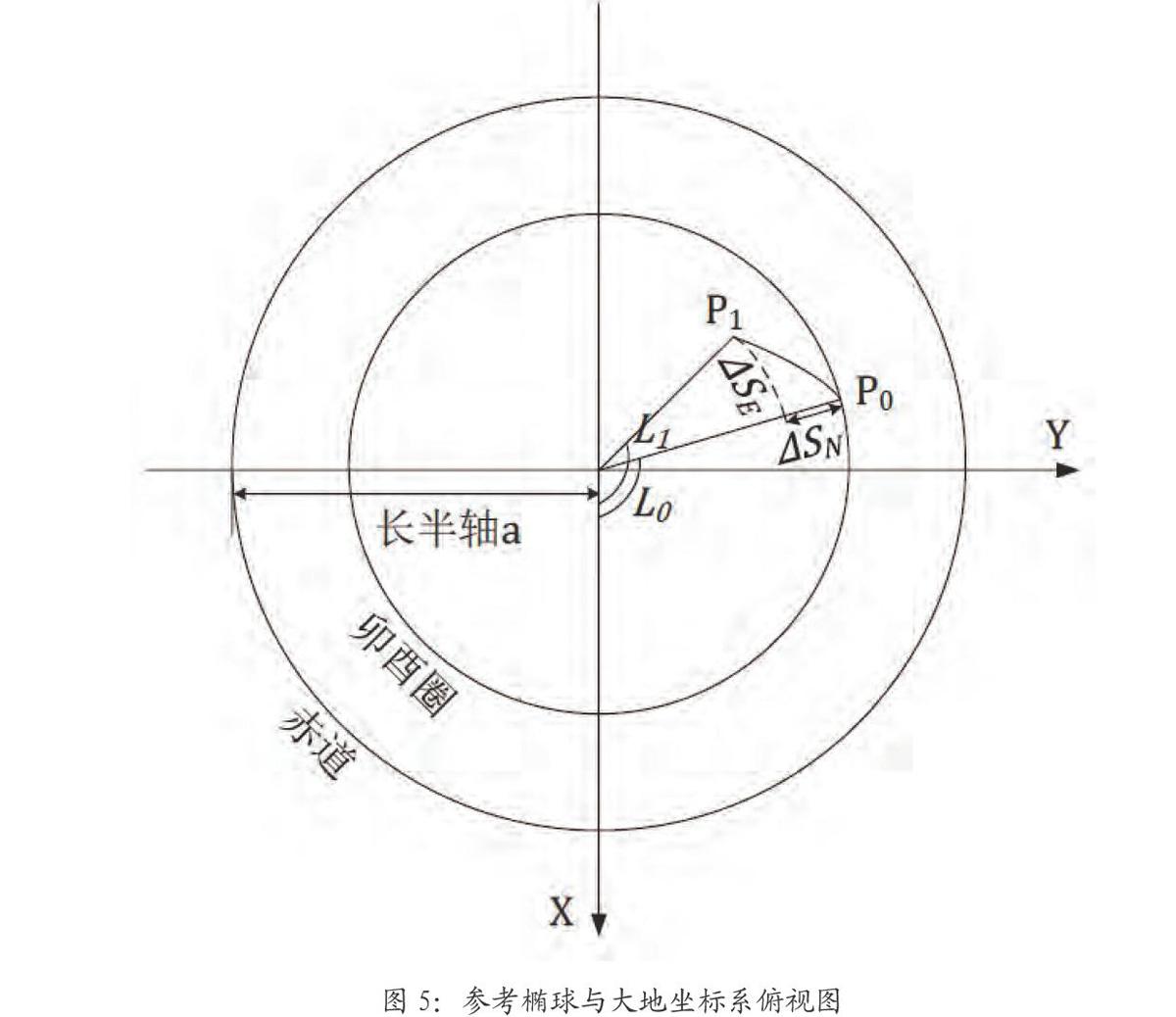
如圖 4 所示,與子午圈不同,參考橢球的卯酉圈(緯線圈)為正圓,因此可以利用圓的弧長公式對大地經度進行計算。由上文可知,P0在參考橢球的投影點A0所對應的卯酉圈半徑為A0橫坐標x0,故大地經度計算如下:
沿東西方向位移量?SE在參考橢球面上平行于卯酉圈方向的投影長度?SE′為:
故未知點P1的大地經度值L1計算式如下:
大地高為某點沿法線方向到參考橢球面的距離,該方向與慣導系統所依據的鉛垂線方向存在角度差異,即垂線偏差。垂線偏差的大小與地球重力場密切相關。由于垂線偏差一般僅有數秒,它所引起的物體在法線方向和鉛垂線方向的位移量偏差并非慣導系統在大地坐標系中的主要誤差來源。若要將垂線偏差的影響考慮在內,可通過 EGM2008 地球重力場模型解算,得待測目標所在位置的垂線偏差子午圈分量(南北分量)ξ和卯酉圈分量(東西分量)η。則待測點大地高的計算式為:
4 計算實驗
為驗證上文所述位移參數在大地坐標系中的嚴密算法,以全球定位系統 GPS 所采
用的 WGS-84 大地坐標系作為解算基準(如表 1 所示),選取北半球中緯度地區某一范圍進行
仿真計算實驗。
設已知初始定位點P0大地坐標(大地緯度、大地經度和大地高)為:B0= 31°28′12.31′′ N;L0=104°00′00.00′′ E;H0=8900m。經一定時間后,慣性導航系統三軸累積位移量為:?SN=1014872.756m;?SE=500000.000m;?SH= 600.000m。
利用計算機輔助設計軟件 Auto CAD 依據該仿真計算的初試設定參數進行建模,得到WGS-84 大地坐標基準下的位移參數真實值作為參考。并分別以半徑R=6367445m的近似球體和 WGS-84 橢球為基準,對三軸位移參數進行大地坐標換算。CAD 建模參考數據及兩種算法計算結果如表2所示。
從計算結果對比表中的相關數據可以看出,以 WGS-84 大地坐標系為基準的嚴密算法所得結果中的大地緯度與大地經度同建模數據更為接近,偏差均在1′′以內,換算為橢球面距離偏差約為 3.6m;而以半徑恒定的正球體為基準進行近似計算,所得大地緯度與大地經度同建模數據偏差的絕對值均超過50′′,換算為橢球面距離偏差約為 2238.2m。由于嚴密算法與近似算法的大地高計算方法相同,垂線偏差對大地高的影響十分微小,因此三者的大地高計算結果一致。該計算實驗表明,相較于近似算法,嚴密計算方法明顯與建模數據更為接近,計算偏差值更小。
5 結論
通過對參考橢球和大地坐標的分析,并對基于大地坐標系的慣性導航位移參數轉換算法
進行嚴密推導,可得結論如下:
全球導航衛星系統(GNSS)與慣性導航系統(INS)在諸多層面互為補充,能夠滿足高精度航空導航的要求;GNSS 以極半徑和赤道半徑存在差值的參考橢球作為大地坐標測量基準。若以正球體代替參考橢球對 INS 位移參數進行換算,則計算結果與真實情況存在偏差,難以滿足較高的導航精度要求;通過基于大地坐標系參考橢球的嚴密算法,可以實現慣性導航系統(INS)在三個正交方向位移參數基于全球導航衛星系統(GNSS)大地坐標增量的嚴密計算,從而增強了 GNSS/INS 組合導航系統的穩定性、可靠性和導航數據的精確性。
參考文獻
[1]魏光興.通信、導航、監視設施[M].成都:西南交通大學出版社,2012:91-100.Wei Guangxing. Communication, Navigation, Surveillance equipment[M].Chengdu: Southwest Jiaotong University Press, 2012:91-100.
[2]蔣慶仙,田育民,孫葵.北斗/INS組合導航關鍵技術分析[J].全球定位系統,2010(06):56-60.Jiang Qingxian, Tian Yumin, Sun Kui.The Crucial Technologies in INS/BD Integrated Navigation System[J].GNSS world of china,2010,06:56-60.
[3]徐紹銓,張華海,楊志剛.GPS測量原理及應用[M].武漢:武漢大學出版社, 2008.Xu Shaoquan,Zhang Huahai,Yang Zhigang. Measurement Principle and application of GPS[M].Wuhan:Wuhan University Press,2008.
[4]黃金山.GPS/SINS/SAR組合導航系統信息融合及誤差修正技術研究[D].西安:西安電子科技大學,2010.Huang Jinshan. Research on GPS/SINS/SAR Integrated Navigation Information Fusion and Error Correction Technology[D]. Xidian University, 2010.
[5]肖進麗,潘正風,黃聲享.GPS/INS 組合導航系統時間同步方法研究[J].測繪通報,2007(04):27-29+58.Xiao Jinli, Pan Zhengfeng,Huang Shengxiang. Time Synchronization Method of GPS/INS Integrated Navigation System, Bulletin of Surveying and Mapping,2007,04:27-29+58.
[6]Grewal M S,Weill L R,Andrews A P. Global Positioning Systems,Inertial Navigation and Integration[M].A John Wiley & Sons,Inc.Publication,2007:133-134.
[7]劉智平,畢開波.慣性導航和組合導航基礎[M].北京:國防工業出版社,2013.Liu Zhiping,Bi Kaibo.Fundamentals of Inertial Navigation and Integrated Navigation[M].Beijing:National Defend Industry Press,2013.
[8]同濟大學數學系.高等數學[M].北京:高等教育出版社,2007.Department of mathematics,Tongji University. Advanced Mathematics[M].Beijing: Higher Education Press, 2007.
[9]章傳銀,郭春喜,陳俊勇,等.EGM 2008 地球重力場模型在中國大陸適用性分析[J].測繪學報,2009(04):283-289.Zhang Chuanyin,Guo Chunxi,Chen Junyong, et al.EGM 2008 and Its Application Analysis in Chinese Mainland[J]. Acta Geodaetica et Cartographica Sinica,2009,04:283-289.
