基于車聯網的時空模型研究
2016-10-21 15:48:27梁雪輝
電子技術與軟件工程 2016年9期
梁雪輝
【關鍵詞】車聯網 時鐘理論 RCC8 時空順序圖
隨著經濟的快速發展,城市交通車輛的數量也在日益增長,發生擁堵和阻塞的現象也愈發嚴重,發生交通事故的頻率也隨之增加,而對交通安全的要求也越來越高。構建車聯網系統成為了解決交通問題的重要舉措。車聯網是將多種先進技術有機地運用于整個交通運輸管理體系而建立的一種實時的、準確的、高效的交通運輸綜合管理和控制系統。
各國正逐漸加大對于車聯網系統的研究力度,國外對于車聯網的研究技術已經比較成熟,比如美國的智能車輛公路系統(IVHS)描述了一個車聯網系統的主要特點;日本的道路情報通信系統(VICS)、英國的(SCOOT)和悉尼交通自適應協調系統(SCATS)等系統通過車輛與道路之間建立有效的信息通信,描述車與周邊環境的相互協作關系,實現智能交通的管理和服務。在國內,有很多的大企業、高校也都投入到智能交通、車聯網的研究領域中來,如國家科技攻關專題“智能公路技術跟蹤”,并且國內首個“智能駕駛與車聯網實驗室”在重慶科技研究院揭牌。但是,由于國內在車聯網方面的研究剛剛起步,實際應用領域還比較窄,主要是體現在電子收費系統等方面,而且在各個環節尚需加強和完善。
本文提出從時空的角度對車聯網構建時空模型,能夠更好地處理車與車、車與周圍環境之間相互時空關系,實現智能交通的管理和服務。時空模型強調的是利用時空分析的工具和技術來模擬動態過程,探究和挖掘隱含于時空數據中的信息和規律,對進一步的時空信息模擬、預測和決策分析具有重要意義及應用價值。
1 時空邏輯
1.1 時間邏輯
時間邏輯往往用來描述一個系統的規則和作為在時間上表示及推理命題的象征。時鐘理論是一種解決時間約束問題的形式化方法,其提出了將概念物理世界和計算世界連接在一起的時鐘規范,并且時鐘理論有一個完整的從連續事件到離散事件的映射系統可用于分析與推理事件序列。基于時鐘理論的物理系統規范使得每一個事件時間描述更清晰和各個事件之間的影響更精確。設e是一個事件,我們將用符號Clock(e)來表示時鐘記錄事件發生的時刻,設C為一個時鐘,用符號event(C)表示事件的發生由Clock(C)記錄event(e)發生的時刻,此時為了方便,我們忽略了相應的名稱的不同,那么則有clock(event(c)) = c
1.2 空間邏輯
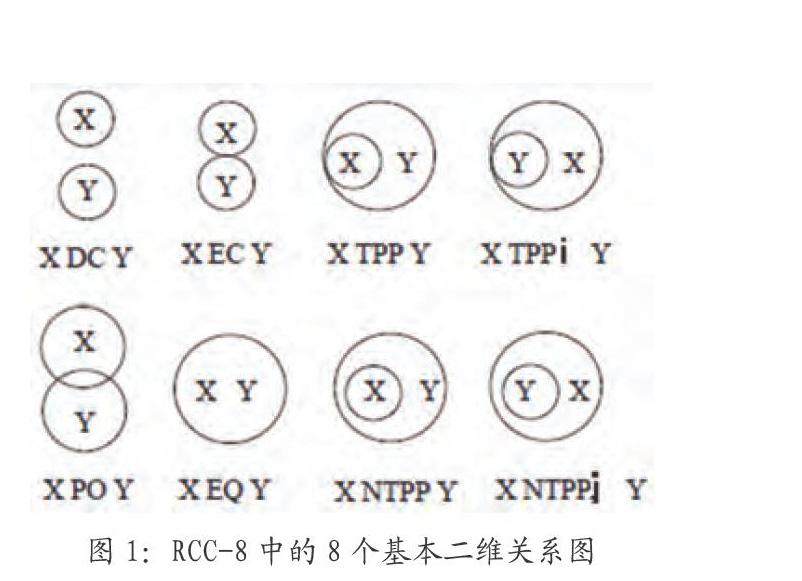
空間邏輯是一個數字邏輯適用于定性空間表示和推理,空間邏輯原語分為基于點和基于區域兩種,在距離模型的研究中,主要是以點為原語,而在空間拓撲推理領域中更多研究中傾向于用區域作為空間原語,如在拓撲關系表示模型方面被廣泛使用的RCC- 8模型。RCC-8是一個眾所周知的關系代數推理二進制的空間區域之間的關系, RCC- 8模型包含了8種互不相交且聯合完備的RCC關系:{DC,EC,PO,TPP, TPPi,EQ,NTPP,NTPPi},其基本關系如圖1。
1.3 時空邏輯
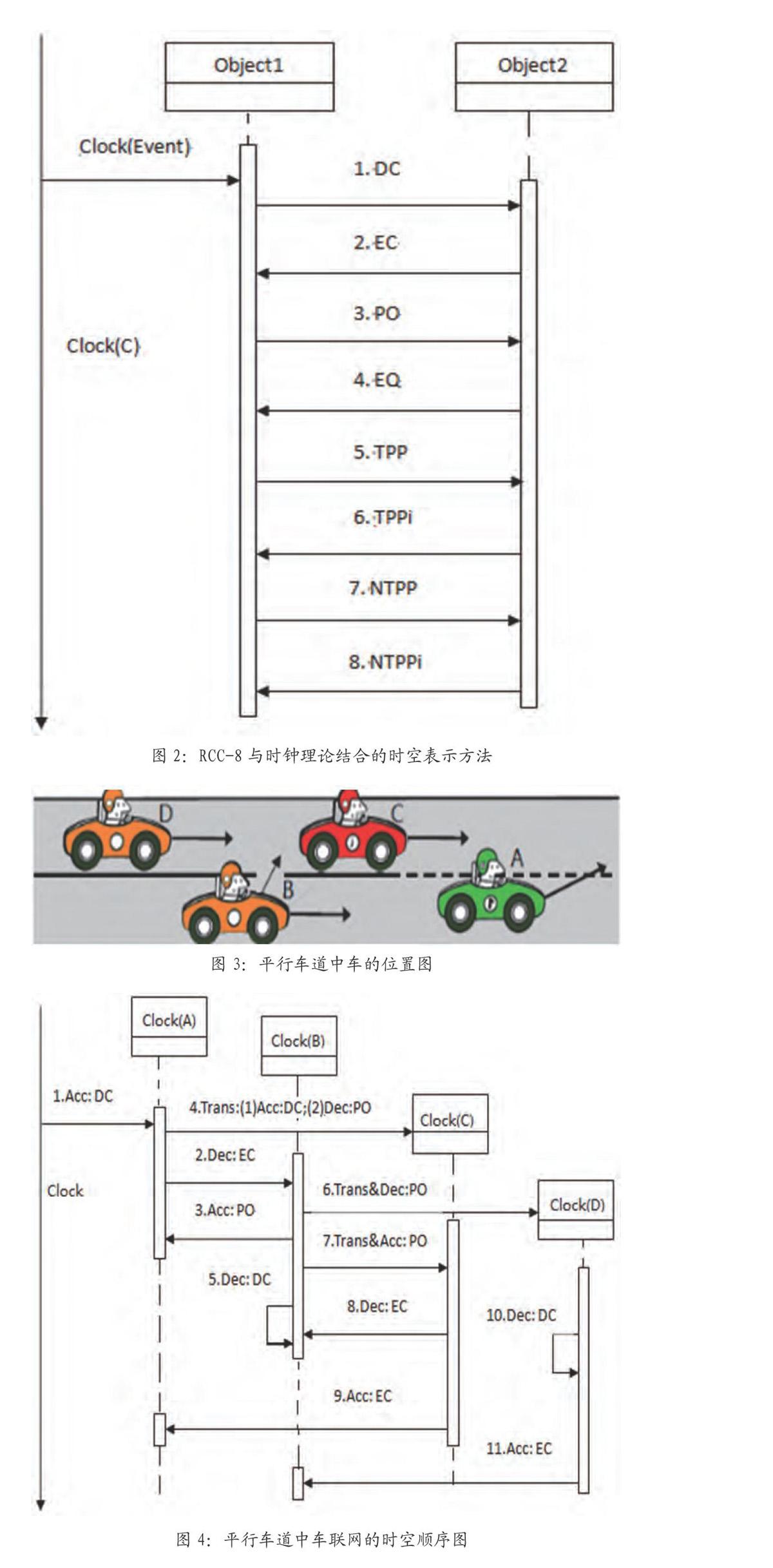
本文的時空邏輯是基于將時鐘理論與表示對象之間的空間拓撲結構的RCC-8相結合,按照時間順序來描述兩個合適的度量空間的對象之間彼此的空間位置關系隨著時間的推移也跟著發生變化,通過展示如何由一個時鐘來表示一個事件的發生導致車聯網中的對象之間的空間關系的變化。其表示方法如圖2 所示。
2 對車聯網建立時空模型
車聯網的大范圍移動和高速移動特點決定了車聯網交通信息傳輸的方式主要是無線通信和數字通信,而車與車之間的信息交互是基于無線網絡系統并且有各種不同節點參與的信息傳輸、共享和交換的過程,通過車輛之間的信息交互,車聯網中的各個節點都能自主的獲取其他節點的信息。
在車聯網中的時空信息的表達形式中,我們以車作為研究的一個對象,我們認為車輛對象是由屬性特征、幾何特征、時態特征和行為特征所構成,屬性特征是反應車輛的屬性信息,并且我們假設車輛的屬性特征由:車輛的位置(x)、速度(v)和加速度(a)組成;幾何特征是車輛的位置表現;時態特征主要是車輛的時態標簽;行為特征是車輛的操作特征,也是我們建立基于車輛的面向對象時空模型重要接口。因此在車聯網環境下的任意車輛的一個時空模型可以表示成:
其中,Car_ID是車輛的標識碼,可以唯一標示車聯網環境下的每一個車輛,Attribute(t)標示隨著時間變化的非空間屬性特征,比如在某一時刻車輛的速度、加速度等物理量,Spatial(t)表示隨著時間變化車輛的位置特征,Actions表示車輛的行為特征,包括車輛在道路上要進行的一系列操作,本文定義車輛的基本操作包括車輛在車道上加速(Acc)、減速(Dec)、勻速(Uniform)和變換車道(Trans)這四個操作。實現車輛與車輛之間的相互聯系,從而使得車輛收集到的數據和操作緊密地聯系起來。Temporal(Ts,Te)表示車輛的時態特征,也就是車輛行為特征采取的操作的開始時間Ts和結束時間Te。這樣,我們就可以將車聯網環境下的車輛的空間對象的所有變化情況歸納為:不同的車輛處于不同的位置與周圍不同的環境中的對象之間所形成的不同的空間拓撲關系。
3 模型驗證
在車聯網中,兩條平行車道中,車與車之間的位置關系除了包含有單一車道時的位置關系外,還須考慮車的變換車道的情況。(如圖3,A與B、C與D同一方向,假設A、B都往C、D所在的車道變換車道,在這種交通環境下,Car_A、Car_B、Car_C和Car_D相互影響制約,車輛的操作有加速(Acc)、減速(Dec)、勻速(Uniform)和換道(Trans),比如Car_A換道的時候Car_C要做出減速的調整,Car_B換道的時候要考慮自身的速度對Car_C和Car_D的影響等。
此時用我們的時空順序圖的模型對這種可以將其可能發生的位置關系進行驗證,所得的分析表示如圖4所示。
4 結束語
本文從時鐘理論和表示區域空間關系的RCC-8相結合的角度,對車聯網構造時空順序圖的時空邏輯模型,并在車聯網的平行車道情景中模擬和驗證了時空順序圖對于分析基于事件處理的應用,既有助于人們對車聯網的認識和理解,也拓寬了研究的思路。當然,由于文章篇幅的原因,對于車聯網中的其他路況比如十字路口等相關情景還沒有進行分析。同樣,時間和空間相結合的研究工作還存在很多問題。在將來,對滿足相關車聯網時空推理性問題的算法會作為我們的研究方向。此外,我們將對我們的時空邏輯進行驗證和提供支持工具。
參考文獻
[1]Varaiya,P.: Smart cars on smart roads:problems of control.IEEE Trans.Automat.Control 38(2)(1993) 195-207.
[2]Hall,R.,Chin,C.,Gadgil,N.:The automated highway system/street interface:Final report.PATH Research Report UCB-ITS-PRR-2003-06,UC Berkeley (2003).
[3]He,J.:A Clock-Based Framework for Construction of Hybrid Systems. Theoretical Aspects of Computing-ICTAC Volume 8049 of the series Lecture Notes in Computer Science, pp.22-41(2013).
[4]Duntsch I,Wang H,McCloskey S.A relation algebraic approach to the region connection calculus.Artificial Intelligence,2000,122:111-136.
[5]D.A.Randell,Z.Cui,and A.G.Cohn.A spatial logic based on regions and connection.Proc.KR-92,165-176,1992.Morgan Kaufmann.
[6]馬楊.車路協同,還有多遠?[J].中國交通信息化,2011,(9):30-31.
[7]金純,徐洪剛,魏星.基于IEEE802.11P/1609標準的路車互聯網的初步實現[J].計算機應用研究,2011,28(11):4219-4223.
