基于仿射不變幾何特征的機械臂標志器識別
2016-10-21 16:49:51董繼紅
工業設計 2016年2期
關鍵詞:模式識別
董繼紅

摘 要:對機械臂標志器的準確識別是對機器人不同機械臂部位位置與姿態準確測量的前提。本文針對在利用機器視覺進行標志器識別的過程中,機械臂運動造成獲取的圖像存在較大仿射變換,從而降低識別準確率的問題,提出利用仿射不變幾何形狀特征來進行機械臂標志器識別。本文基于已有的幾何形狀特征,結合標志器實際的幾何形狀,通過歸一化手段確定了六個仿射不變幾何形狀特征以及兩個用于輔助識別以提高識別準確的特征判別因子,在此基礎上,建立了標志器目標特征向量庫,用于通過模式識別的手段對標志器進行識別。最后,搭建實驗裝置,在不同拍攝角度下,利用采集的圖像對標志器進行識別,并與常規的利用HU不變矩的方法進行對比,結果表明,基于仿射不變幾何特征對機械臂標志器進行識別的方法,能在保證實時性的情況下,有效降低因拍攝角度不同對識別準確率造成的影響,從而提高識別準確率。
關鍵詞:機械臂標志器;仿射不變幾何特征;特征向量;模式識別
隨著航天技術的不斷發展進步與人類對太空探索活動的不斷深入,未來空間機器人將扮演越來越關鍵的角色。然而,空間機器人相對于地面固定基座的機器人運動學特性較復雜,增加了空間機器人控制難度。所以空間機器人控制過程的地面仿真驗證變得非常重要。基于氣浮的空間微重力模擬系統為空間機器人控制的地面仿真驗證提供了一種方便有效的實驗手段。然而,針對大型氣浮式實驗平臺,如何在實時的條件下對機器人不同機械臂進行識別以及位置姿態的精確測量,便成了制約實驗平臺應用于空間機器人控制地面仿真的關鍵問題。目前,常用的移動機器人定位技術,難以在實時條件下對機器人的不同部件進行識別與位置姿態的測量。
計算機視覺為類似空間機器人基座與空間機械臂等多剛體航天器不同運動機構的識別以及位姿確定提供了準確有效的解決方式。可將具有顯著形狀差異的目標識別器貼附于空間機器人基座與不同機械臂部位,這樣便可以通過對目標識別器的識別達到對運動機構構型進行識別的目的,在此基礎上再對運動機構進行精確定位。對機械臂標志器的準確識別是對機器人基座與不同機械臂部位位置與姿態準確測量的前提。然而,機械臂在視野中相對位置的變化會導致圖像中實際的目標識別器形狀與原始形狀之間存在較大的仿射變換,從而嚴重影響常規基于幾何形狀特征識別算法的準確性。針對該問題,本無提出基于仿射不變幾何特征的機械臂標志器識別算法,不但有效提高了識別準確率,并且能夠保證識別的實時性,對于空間機器人控制過程的地面仿真驗證具有重要意義。
1 仿射不變形狀特征
1.1 幾何形狀特征
圖像特征是圖像中存在的一種抽象的特有的可用于標識的固有屬性,幾何形狀特征便是其中一種常用的圖像特征。形狀特征的分析是在將圖像分割為不同區域的基礎上,通過區域的幾何形狀特性來對其進行描述。除了基本的幾何參數,如周長、面積、重心位置等,還包括復雜度、形狀系數、最小外接矩形長寬比、方位角,球狀性,圓形度以及似圓度等,下面對幾種幾何特征進行介紹。
復雜度C:
(1)
其中L為區域周長,S為區域面積。
形狀系數K反映區域的狹長程度,
(2)
方位角表示目標區域最小外接矩形長軸與橫軸的夾角。還有三個描述區域緊湊性的幾何形狀參數,球狀性,圓形度和似圓度等。
球狀性SP:
(3)
和分別為區域重心到邊界的最短和最長距離。
圓形性CI是一個用目標區域中所有邊界點定義的特征量,
(4)
其中為區域重心到邊界點的平均距離,為重心到邊界距離的標準差:
(5)
(6)
另外,似圓度也可以描述形狀的緊湊性或者狹長性,
(7)
其中,為區域橫軸長度。
1.2 仿射不變幾何形狀特征
空間機器人實驗模擬系統,本文主要針對空間機械臂運動機構的四個標志器進行識別算法研究,標志器如圖1所示。
在對機械臂不同部位處標志器進行具體的定義之后,便可以對這些幾何形狀的特征進行深入挖掘,定義仿射不變幾何特征。
通過歸一化構造仿射不變幾何特征。雖然仿射變換會改變幾何形狀特征的具體值,但并不改變四個標志器某些特征的排列順序。這些特征中比較典型的有面積,復雜度、形狀系數,圓形度,球狀性以及似圓度等。
這樣便得到歸一化面積、歸一化復雜度、歸一化形狀系數、歸一化圓形性、歸一化球狀性歸一化似圓度等6個比較典型的仿射不變形狀特征。
圖1 機械臂不同機構四個標志器
定義特征判別因子,在通過歸一化構造仿射幾何不變特征的基礎上,還可以定義對識別起到關鍵作用兩個特征判別因子,一是方位角,二是形狀質心與外接圓的重合性。
方位角為圓形標志器的特征判別因子:
(8)
形狀質心與外接圓的重合性為三角形標志器的特征判別因子:
(9)
這兩個特征判別因子,即方位角和形狀質心與外接圓中心重合與否,可在歸一化幾何形狀特征接近時起到關鍵判別作用,有效提高識別準確率。
1.3 特征庫建立
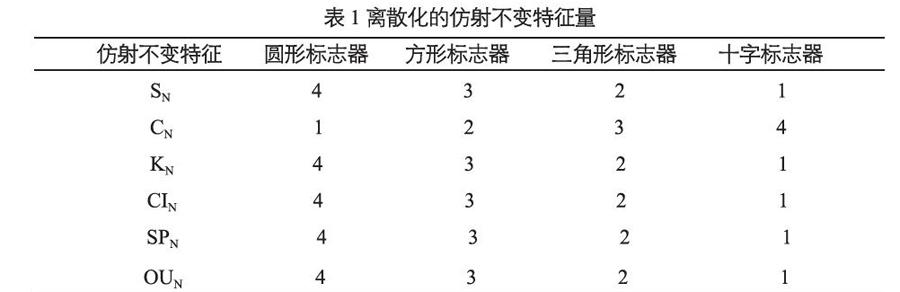
在具體機械臂標志器識別之前,需要首先建立各機械臂標志器的特征向量庫,在實際識別過程中,基于該向量庫以及與各標志器仿射不變幾何特征構成的特征向量,利用歐式距離進行判別。由于隨著拍攝角度不同那個,各個仿射不變特征的值也在改變,只是排列順序保持不變,為了得到隨拍攝角度不變的特征向量庫,可以按照排列順序,將各個特征向量的值離散化,由于本文針對4個標志器進行識別,那么可以將各個仿射不變特征歸一化之后,按照排列順序,用1-4這4個整數代替。結果入下表:
表1 離散化的仿射不變特征量
猜你喜歡
中成藥(2018年2期)2018-05-09 07:19:52
智能系統學報(2018年6期)2018-02-04 11:23:57
中成藥(2017年10期)2017-11-16 00:50:05
電子測試(2017年23期)2017-04-04 05:06:50
智能系統學報(2017年5期)2017-01-22 11:21:30
電測與儀表(2016年6期)2016-04-11 12:07:48
海軍航空大學學報(2015年1期)2015-11-11 17:17:57
智能系統學報(2015年3期)2015-01-29 15:20:12
電測與儀表(2014年15期)2014-04-04 12:05:20
河南科技(2014年5期)2014-02-27 14:08:35
