基于AIS信息的艦船位置標(biāo)校方法
2016-10-18 02:21:33任文娟周志鑫呂守業(yè)師棟鋒
系統(tǒng)工程與電子技術(shù) 2016年10期
關(guān)鍵詞:信息
任文娟, 周志鑫, 呂守業(yè), 師棟鋒
(1. 中國(guó)科學(xué)院電子學(xué)研究所, 北京 100190; 2. 北京遙感信息研究所, 北京 100854;3. 中國(guó)科學(xué)院空間信息處理與應(yīng)用系統(tǒng)技術(shù)重點(diǎn)實(shí)驗(yàn)室, 北京 100190)
?
基于AIS信息的艦船位置標(biāo)校方法
任文娟1,2,3, 周志鑫2, 呂守業(yè)2, 師棟鋒2
(1. 中國(guó)科學(xué)院電子學(xué)研究所, 北京 100190; 2. 北京遙感信息研究所, 北京 100854;3. 中國(guó)科學(xué)院空間信息處理與應(yīng)用系統(tǒng)技術(shù)重點(diǎn)實(shí)驗(yàn)室, 北京 100190)
為了提高時(shí)差型衛(wèi)星定位系統(tǒng)對(duì)艦船的定位精度,提出了一種基于船舶自動(dòng)識(shí)別系統(tǒng)(automatic identification system,AIS)信息的艦船位置標(biāo)校方法,該方法將具有AIS信息的民船作為標(biāo)校源對(duì)軍艦位置進(jìn)行校正。首先,針對(duì)AIS信息無(wú)法直接用于位置標(biāo)校的問(wèn)題,提出了標(biāo)校源雷達(dá)位置及其誤差估計(jì)方法;其次,針對(duì)標(biāo)校源雷達(dá)位置存在的誤差,建立了標(biāo)校方法的誤差分析模型和標(biāo)校源有效性分析方法,理論分析了標(biāo)校定位精度及其改善程度,為標(biāo)校源的選擇提供了依據(jù)。最后,仿真分析驗(yàn)證了提出的標(biāo)校方法的有效性。
自動(dòng)識(shí)別系統(tǒng); 時(shí)差; 時(shí)差型衛(wèi)星定位系統(tǒng); 標(biāo)校; 定位精度; 誤差分析
0 引 言
時(shí)差型衛(wèi)星定位系統(tǒng)由3顆中低軌衛(wèi)星編隊(duì)組成,采用時(shí)差定位體制,利用輻射源到達(dá)3顆衛(wèi)星的兩個(gè)時(shí)差雙曲面和地球橢球面相交,對(duì)地(海)面目標(biāo)進(jìn)行即時(shí)定位。時(shí)差型衛(wèi)星定位系統(tǒng)在海洋監(jiān)視上具有空域、時(shí)域覆蓋范圍廣等優(yōu)勢(shì),得到了廣泛的研究和應(yīng)用[1-5]。
定位精度是定位系統(tǒng)的重要性能指標(biāo),由于時(shí)差等參數(shù)的測(cè)量精度仍較低,時(shí)差型衛(wèi)星定位系統(tǒng)的定位精度較低,制約了定位信息的有效應(yīng)用,因此提高定位精度就成為一個(gè)關(guān)鍵問(wèn)題[6-14]。除了研究時(shí)間精確測(cè)量方法、目標(biāo)位置精確定位算法[6-11],還有學(xué)者提出和研究了位置標(biāo)校方法,用來(lái)提高目標(biāo)定位精度。文獻(xiàn)[12]分析了系統(tǒng)誤差和隨機(jī)誤差對(duì)定位精度的影響,指出時(shí)差和輔星相對(duì)位置的系統(tǒng)誤差是影響定位精度的主要因素。文獻(xiàn)[13]針對(duì)時(shí)差的系統(tǒng)誤差引起的定位誤差,提出了基于單參考源的位置校正方法。文獻(xiàn)[14]針對(duì)時(shí)差和輔星相對(duì)位置的系統(tǒng)誤差引起的定位誤差,提出了基于4個(gè)參考源的標(biāo)校方法。但是上述文獻(xiàn)提出的標(biāo)校方法是基于地面上的固定標(biāo)校源,只能對(duì)距離標(biāo)校源一定范圍內(nèi)的陸地目標(biāo)或者近海岸目標(biāo)進(jìn)行標(biāo)校,無(wú)法在全球遠(yuǎn)海海域?qū)崿F(xiàn)更大范圍的艦船目標(biāo)位置校正。
近年來(lái),隨著船舶自動(dòng)識(shí)別系統(tǒng)(automatic identification system,AIS)[15-16]在全球的推廣使用,各國(guó)均大力發(fā)展AIS信號(hào)偵察系統(tǒng),尤其是以航天器為平臺(tái)的星載AIS信號(hào)偵察系統(tǒng)[17],并開(kāi)展AIS信息與其他系統(tǒng)的融合處理研究[18-20]。AIS是船舶上的自動(dòng)連續(xù)廣播系統(tǒng),它能在船舶和岸臺(tái)間交換信息,而星載AIS信號(hào)偵察系統(tǒng)能夠接收和解析AIS信號(hào),從而獲得民船的AIS信息,包括船舶準(zhǔn)確的身份信息、高精度的位置信息等,這些信息對(duì)時(shí)差型衛(wèi)星定位系統(tǒng)是有益的補(bǔ)充。將星載AIS信號(hào)偵察信息和時(shí)差型衛(wèi)星定位信息進(jìn)行融合處理,一方面,可以利用AIS信息識(shí)別篩選出民船,提高衛(wèi)星定位系統(tǒng)軍艦識(shí)別的效率和準(zhǔn)確率;另一方面,由于AIS信息中船舶位置精度可達(dá)米級(jí)[16],因此可以將具有AIS信息的民船作為標(biāo)校源,對(duì)軍艦的衛(wèi)星定位位置進(jìn)行標(biāo)校,從而提高軍艦的定位精度。
本文將AIS信息引入時(shí)差型衛(wèi)星定位系統(tǒng),提出一種基于AIS信息的時(shí)差型衛(wèi)星定位系統(tǒng)艦船位置標(biāo)校方法,即首先將AIS信號(hào)偵察系統(tǒng)和時(shí)差型衛(wèi)星定位系統(tǒng)獲取的同一民船關(guān)聯(lián)起來(lái),然后將關(guān)聯(lián)上AIS信息的民船作為標(biāo)校源對(duì)軍艦進(jìn)行位置標(biāo)校。本方法從全球海域客觀存在的大量民船中選取標(biāo)校源,實(shí)現(xiàn)了對(duì)全球海域軍艦?zāi)繕?biāo)的位置標(biāo)校。與基于地面固定標(biāo)校源的標(biāo)校方法相比,具有標(biāo)校源選取方便、可標(biāo)校范圍大的優(yōu)點(diǎn)。但是本方法的前提是,獲取AIS信號(hào)偵察系統(tǒng)和時(shí)差型衛(wèi)星定位系統(tǒng)同時(shí)相數(shù)據(jù),并實(shí)現(xiàn)同一民船目標(biāo)的關(guān)聯(lián)。在實(shí)際工程中,可以在時(shí)差型衛(wèi)星定位系統(tǒng)衛(wèi)星平臺(tái)上搭載AIS偵察載荷,從而獲取同時(shí)相數(shù)據(jù),而目標(biāo)關(guān)聯(lián)的問(wèn)題在本文中暫不考慮。
除了使用前提,本方法還存在兩個(gè)問(wèn)題:一是AIS信息中船舶位置信息實(shí)際上是全球定位系統(tǒng)(global positioning system,GPS)天線的位置,它與船舶上輻射源位置存在偏差,不能直接用于位置標(biāo)校,因此需要對(duì)標(biāo)校源位置進(jìn)行估計(jì);另一方面,與具有準(zhǔn)確位置的地面固定標(biāo)校源不同,民船標(biāo)校源位置存在誤差,會(huì)影響標(biāo)校方法的有效性,有效標(biāo)校也會(huì)對(duì)標(biāo)校源位置誤差提出要求,因此需要對(duì)標(biāo)校方法的誤差進(jìn)行分析。本文針對(duì)上述兩個(gè)問(wèn)題展開(kāi)研究,提出了標(biāo)校源位置的估計(jì)方法,并對(duì)估計(jì)誤差進(jìn)行了分析;建立了標(biāo)校方法的誤差分析模型,對(duì)標(biāo)校源位置誤差以及參數(shù)測(cè)量誤差對(duì)標(biāo)校效果的影響進(jìn)行了全面分析,驗(yàn)證了本文方法的有效性;建立了標(biāo)校源的有效性分析方法,為標(biāo)校源的選擇提供了依據(jù)。
1 艦船位置標(biāo)校方法
1.1AIS與AIS信號(hào)偵察系統(tǒng)概述
近年來(lái),為了進(jìn)一步提高船舶航行的安全性和效率,AIS應(yīng)運(yùn)而生。隨著AIS的技術(shù)發(fā)展和廣泛應(yīng)用,AIS信號(hào)偵察技術(shù)也快速發(fā)展,并成為廣域民船監(jiān)測(cè)的有效手段[15-17]。
AIS是采用專用國(guó)際頻道、自組織時(shí)分多址的自動(dòng)連續(xù)廣播系統(tǒng),它自動(dòng)向鄰近的船舶和岸臺(tái)播發(fā)本船信息,包含靜、動(dòng)態(tài)信息和與航次有關(guān)的信息及安全信息。其中,靜態(tài)信息中包括船舶的長(zhǎng)和寬、定位儀天線在船舶上安裝的相對(duì)位置等信息;動(dòng)態(tài)信息包括船舶位置、航向、航速等信息。
需要指明的是,AIS播發(fā)的船位信息主要來(lái)源于船舶上的GPS或差分全球定位系統(tǒng)(differential GPS,DGPS)的定位信息,該定位信息是GPS天線的位置,靜態(tài)信息中給出了定位儀天線在船舶上安裝的相對(duì)位置信息,包括GPS天線距離船舶首、尾及左、右船舷的距離。采用DGPS的定位精度優(yōu)于10 m,采用GPS的定位精度為10~20 m。
可見(jiàn),民船上裝有GPS和AIS,其中GPS獲得民船自身位置,AIS對(duì)外廣播自身位置。而AIS信號(hào)偵察系統(tǒng)是對(duì)AIS信號(hào)進(jìn)行偵察的系統(tǒng),通過(guò)偵獲、解析AIS信號(hào)從而獲得民船位置。由于AIS信息中船舶位置指的是GPS天線位置,因此AIS信號(hào)偵察系統(tǒng)獲得的也是船舶GPS天線的位置。
1.2艦船位置標(biāo)校流程
對(duì)于既安裝了雷達(dá)、又安裝了AIS的民船,依據(jù)時(shí)空及身份屬性特征,可以將AIS信號(hào)偵察系統(tǒng)和時(shí)差型衛(wèi)星定位系統(tǒng)對(duì)同一民船的偵察定位結(jié)果關(guān)聯(lián)起來(lái),該民船可以作為已知位置的標(biāo)校源,對(duì)其他軍艦的衛(wèi)星定位系統(tǒng)的定位結(jié)果進(jìn)行標(biāo)校,提高時(shí)差型衛(wèi)星定位系統(tǒng)的艦船定位精度。

綜上所述,基于AIS信息的時(shí)差型衛(wèi)星定位系統(tǒng)艦船位置校正的基本流程如圖1所示。
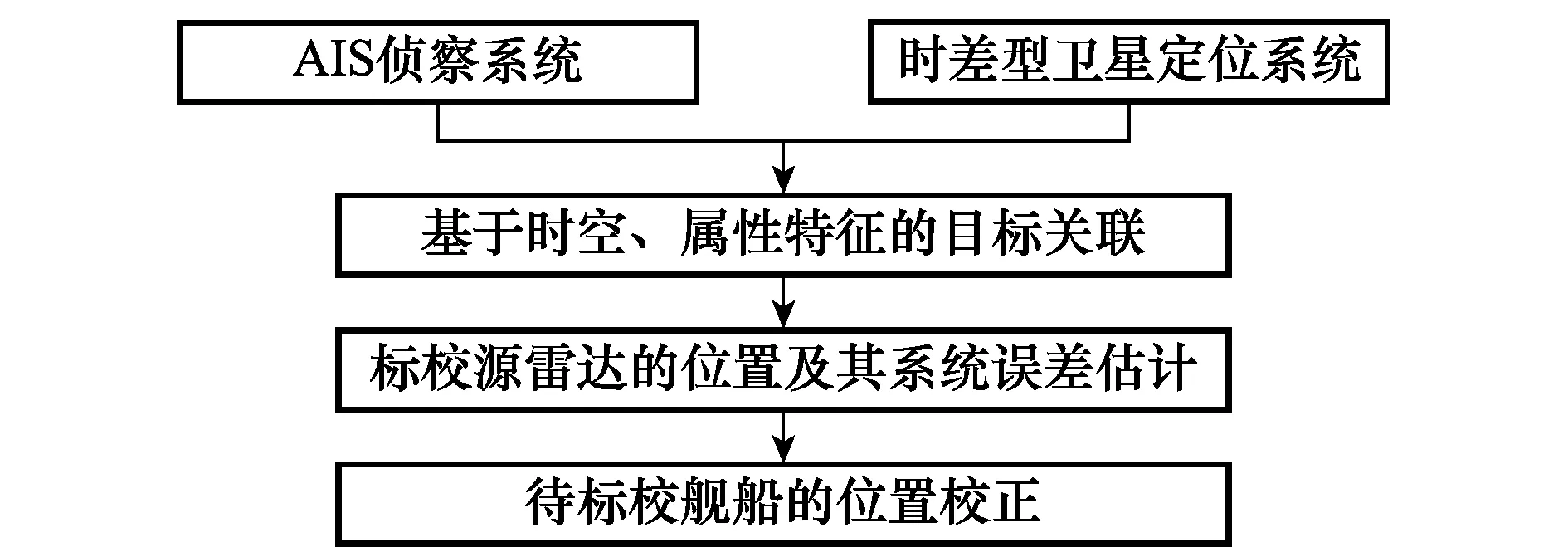
圖1 基于AIS信息的艦船位置校正方法流程圖Fig.1 Flow chart of the position calibration technique of ship based on information of AIS
1.3標(biāo)校源雷達(dá)位置及其系統(tǒng)誤差估計(jì)
(1)

圖2 GPS天線的安裝位置Fig.2 Position of GPS antenna
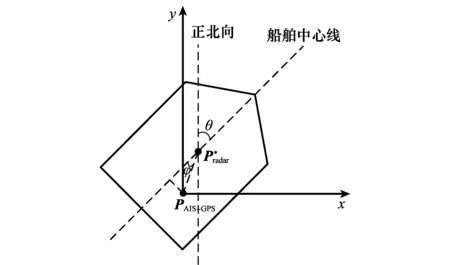
圖3 地理坐標(biāo)系下的位置關(guān)系Fig.3 Position relation under geographical coordinates

1.4基于單船舶標(biāo)校源的艦船位置標(biāo)校算法
文獻(xiàn)[12]指出,時(shí)差和輔星相對(duì)位置的系統(tǒng)誤差是影響時(shí)差型衛(wèi)星定位系統(tǒng)定位精度的主要因素。采用高精度衛(wèi)星導(dǎo)航時(shí),由衛(wèi)星位置誤差引起的定位誤差可以忽略,如何消除時(shí)差的系統(tǒng)誤差對(duì)定位精度的影響成為重點(diǎn)需要解決的問(wèn)題。因此,在本文中只研究基于單個(gè)民船標(biāo)校源的艦船位置標(biāo)校算法。

(2)

(3)
從式(3)中可見(jiàn),利用標(biāo)校源的時(shí)差測(cè)量值可以消除軍艦的時(shí)差測(cè)量值中的時(shí)鐘同步誤差。對(duì)應(yīng)式(3)兩個(gè)觀測(cè)量的觀測(cè)方程,結(jié)合地球橢球方程,形成待標(biāo)校軍艦的定位方程組:
(4)
式中,c為電磁波傳播速率;a為地球長(zhǎng)半軸;e為第一偏心率。
式(4)又可寫(xiě)為
(5)
相比較時(shí)差型衛(wèi)星定位系統(tǒng)的目標(biāo)定位方程[10],標(biāo)校定位實(shí)現(xiàn)了對(duì)時(shí)差系統(tǒng)誤差的修正。采用基于一階泰勒展開(kāi)的牛頓迭代方法[6-7]對(duì)標(biāo)校定位方程式(5)進(jìn)行求解,初始值取時(shí)差型衛(wèi)星定位結(jié)果,當(dāng)前后兩次定位結(jié)果的距離小于某個(gè)門(mén)限時(shí)停止迭代,即可得到待標(biāo)校軍艦的位置X。
2 艦船位置標(biāo)校定位誤差分析
為了分析標(biāo)校定位誤差,建立誤差分析模型,分析3個(gè)參數(shù)的兩類誤差對(duì)標(biāo)校定位精度的影響,3個(gè)參數(shù)分別為時(shí)差、衛(wèi)星位置和標(biāo)校源位置,兩類誤差分別為系統(tǒng)誤差和隨機(jī)誤差。在誤差分析的基礎(chǔ)上,提出了標(biāo)校源的有效性分析方法,為標(biāo)校源的選擇提供了依據(jù)。
2.1誤差模型與誤差分析
為了分析標(biāo)校定位誤差,對(duì)式(5)進(jìn)行全微分可得
(6)
式中
記
將式(6)寫(xiě)為
CdX=B(dT-dT′)+(D-D′)dS+C′dP
(7)
式中
求解艦船位置誤差為
dX=C-1(BdT+DdS)+C-1(-BdT′-D′dS+C′dP)=
(8)
式中,dXTDOA為時(shí)差型衛(wèi)星定位誤差[21];dXAIS為利用AIS信息進(jìn)行位置標(biāo)校引起的定位誤差。
由式(7)可見(jiàn),標(biāo)校定位誤差取決于兩個(gè)方面:一是軍艦與衛(wèi)星的相對(duì)位置關(guān)系和標(biāo)校源與衛(wèi)星的相對(duì)位置關(guān)系(分別體現(xiàn)在C、D和C′、D′上);二是測(cè)量誤差,包括時(shí)差誤差,衛(wèi)星位置誤差和標(biāo)校源位置誤差(體現(xiàn)在dT、dT′、dS和dP上)。3個(gè)參數(shù)的誤差包含系統(tǒng)誤差和隨機(jī)誤差,其中系統(tǒng)誤差引起定位固定偏差,隨機(jī)誤差引起定位隨機(jī)偏差。

(9)
則定位誤差的均值為
(10)
定位誤差的協(xié)方差矩陣為
C-1BRBTC-T
(11)
可見(jiàn),基于單船舶的標(biāo)校定位可以消除時(shí)差的系統(tǒng)誤差引起的定位固定偏差,但單次定位的時(shí)差隨機(jī)誤差引起的定位隨機(jī)偏差增大。
(2) 下面分析衛(wèi)星位置的系統(tǒng)誤差對(duì)定位誤差的影響。假設(shè)僅標(biāo)校源位置誤差為零,此時(shí)dX=C-1[B(dT-dT′)+(D-D′)dS]。設(shè)衛(wèi)星位置整體的系統(tǒng)誤差為σs0,輔星相對(duì)位置的系統(tǒng)誤差為σsi(i=1,2),則衛(wèi)星位置的系統(tǒng)誤差為
(12)
式中,11×3為1×3的1矩陣。
則定位誤差的均值為
(13)

(3) 本文第1.3節(jié)中指出船舶標(biāo)校源位置存在系統(tǒng)誤差,下面分析該誤差對(duì)標(biāo)校定位精度的影響。不考慮衛(wèi)星位置誤差,此時(shí)dX=C-1[B(dT-dT′)+C′dP],可見(jiàn)標(biāo)校源位置誤差的存在又引入了新的定位誤差,且該誤差與艦船和衛(wèi)星的相對(duì)位置關(guān)系(體現(xiàn)在C上)、標(biāo)校源和衛(wèi)星的相對(duì)位置關(guān)系(體現(xiàn)在C′上)有關(guān)。設(shè)標(biāo)校源位置的系統(tǒng)誤差分量為σp0,則有
(14)
則定位誤差的均值為
(15)
可見(jiàn),標(biāo)校源位置的系統(tǒng)誤差也引起了定位位置的固定偏差。
利用本節(jié)所述的分析方法,依據(jù)式(7),不需要求解定位方程就可以分析單標(biāo)校源標(biāo)校后的定位誤差。
2.2標(biāo)校源的有效性分析
從上述分析可以看出,標(biāo)校算法消除了時(shí)差的系統(tǒng)誤差,但是標(biāo)校源位置的系統(tǒng)誤差又帶來(lái)了新的定位位置的固定偏差。只有標(biāo)校定位后的固定偏差小于標(biāo)校定位前的固定偏差,才能稱之為有效標(biāo)校。因此,需要估計(jì)一定測(cè)量誤差條件下,有效標(biāo)校對(duì)標(biāo)校源位置系統(tǒng)誤差的要求,下面從理論上分析有效標(biāo)校對(duì)標(biāo)校源位置系統(tǒng)誤差的約束。
假設(shè)時(shí)差型衛(wèi)星定位位置的固定偏差為dXTDOAs,標(biāo)校定位位置的固定偏差為dXs,定義標(biāo)校前后定位位置的固定偏差改善因子為
(16)
從式(6)可得,η≤1。當(dāng)η=1時(shí),標(biāo)校定位位置的固定偏差dXs為0,即標(biāo)校后不存在固定偏差。η為負(fù)值時(shí),標(biāo)校后固定偏差增大;η為正值時(shí),標(biāo)校后固定偏差減小;η為正值的區(qū)域稱為標(biāo)校源的有效標(biāo)校范圍。
對(duì)于某個(gè)待標(biāo)校的軍艦,可以利用固定偏差改善因子來(lái)分析指定標(biāo)校效果對(duì)標(biāo)校源位置系統(tǒng)誤差的約束。由式(8)可得:
(17)
(18)
因此若假設(shè)標(biāo)校源位置的系統(tǒng)誤差分量為σp0,則dXs是σp0的二次函數(shù)。由η(σp0)≥α(α≥0),可求得σ1≤σp0≤σ2。即為了使艦船位置固定偏差的減小程度不小于α,要求標(biāo)校源位置的系統(tǒng)誤差滿足一定的要求。若按照第1.3節(jié)估計(jì)的標(biāo)校源雷達(dá)位置的最大系統(tǒng)誤差不能滿足上述要求,則其不能被選為標(biāo)校源對(duì)待標(biāo)校艦船進(jìn)行位置校正。
3 仿真分析
仿真參數(shù):假設(shè)3顆衛(wèi)星飛行軌道的高度相同,約為700km,主星和輔星1的星間距約為67km,主星和輔星2的星間距約為72km。以三星星下點(diǎn)重心為中心,在經(jīng)度、緯度均為18°范圍內(nèi)各做17等分,選取289個(gè)目標(biāo)點(diǎn)位,其中目標(biāo)點(diǎn)距星下點(diǎn)中心的最遠(yuǎn)距離約為1 350km。蒙特卡羅實(shí)驗(yàn)次數(shù)為500次。
(1) 假設(shè)時(shí)差的系統(tǒng)誤差為50ns,標(biāo)校源位于星下點(diǎn)中心時(shí),時(shí)差型衛(wèi)星定位的誤差分布和標(biāo)校定位的誤差分布如圖4所示,標(biāo)校源位于圖中“o”所示位置。蒙特卡羅仿真實(shí)驗(yàn)和理論分析方法(見(jiàn)式(16))的計(jì)算結(jié)果一致:固定偏差改善因子均為1。可見(jiàn),標(biāo)校定位后定位固定偏差為0,即基于單船舶標(biāo)校源的位置標(biāo)校方法消除了時(shí)差系統(tǒng)誤差引起的定位誤差。
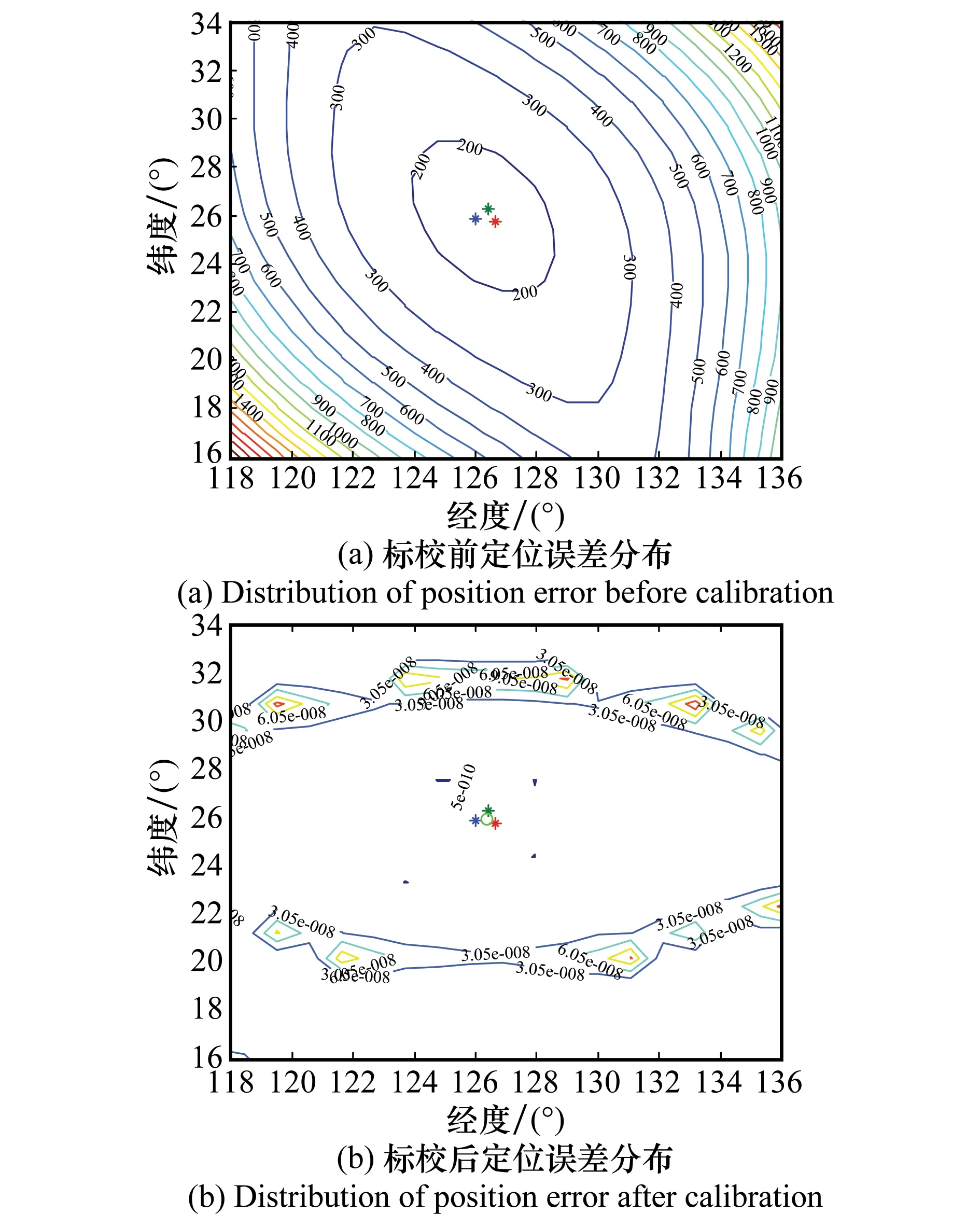
圖4 僅存在時(shí)差系統(tǒng)誤差時(shí)的標(biāo)校效果Fig.4 Calibration effect with TDOA system error only
(2)假設(shè)衛(wèi)星位置整體的系統(tǒng)誤差為30m,輔星相對(duì)位置的系統(tǒng)誤差為20m。標(biāo)校源位于星下點(diǎn)中心時(shí),時(shí)差型衛(wèi)星定位的誤差分布、標(biāo)校定位的誤差分布如圖5所示,標(biāo)校源位于圖中“o”所示位置。蒙特卡羅仿真實(shí)驗(yàn)和理論分析方法得到的固定偏差改善因子分布如圖6所示。可見(jiàn),當(dāng)軍艦和標(biāo)校源位置接近時(shí),基于單標(biāo)校源的位置標(biāo)校方法可以消除部分衛(wèi)星位置系統(tǒng)誤差引起的定位固定偏差。并且,理論分析方法和蒙特卡羅實(shí)驗(yàn)結(jié)果數(shù)值一致,因此理論分析方法是正確的。
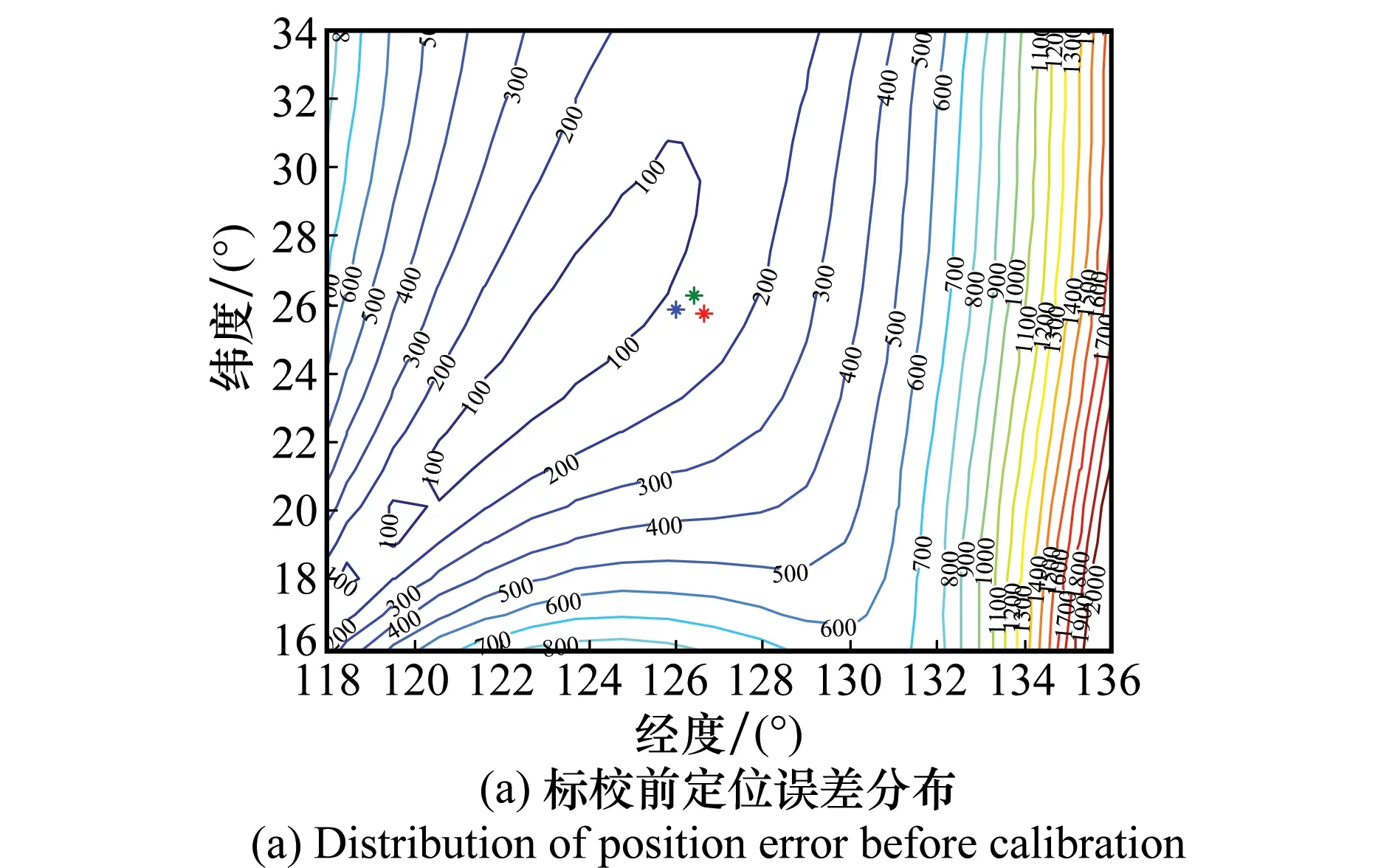
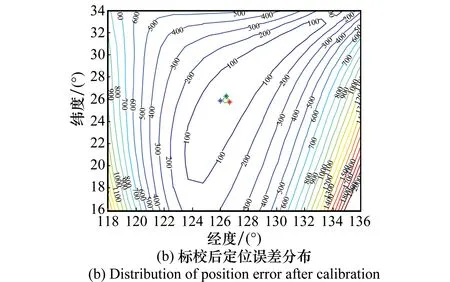
圖5 僅存在衛(wèi)星位置系統(tǒng)誤差時(shí)的標(biāo)校效果Fig.5 Calibration effect with satellite position system error only
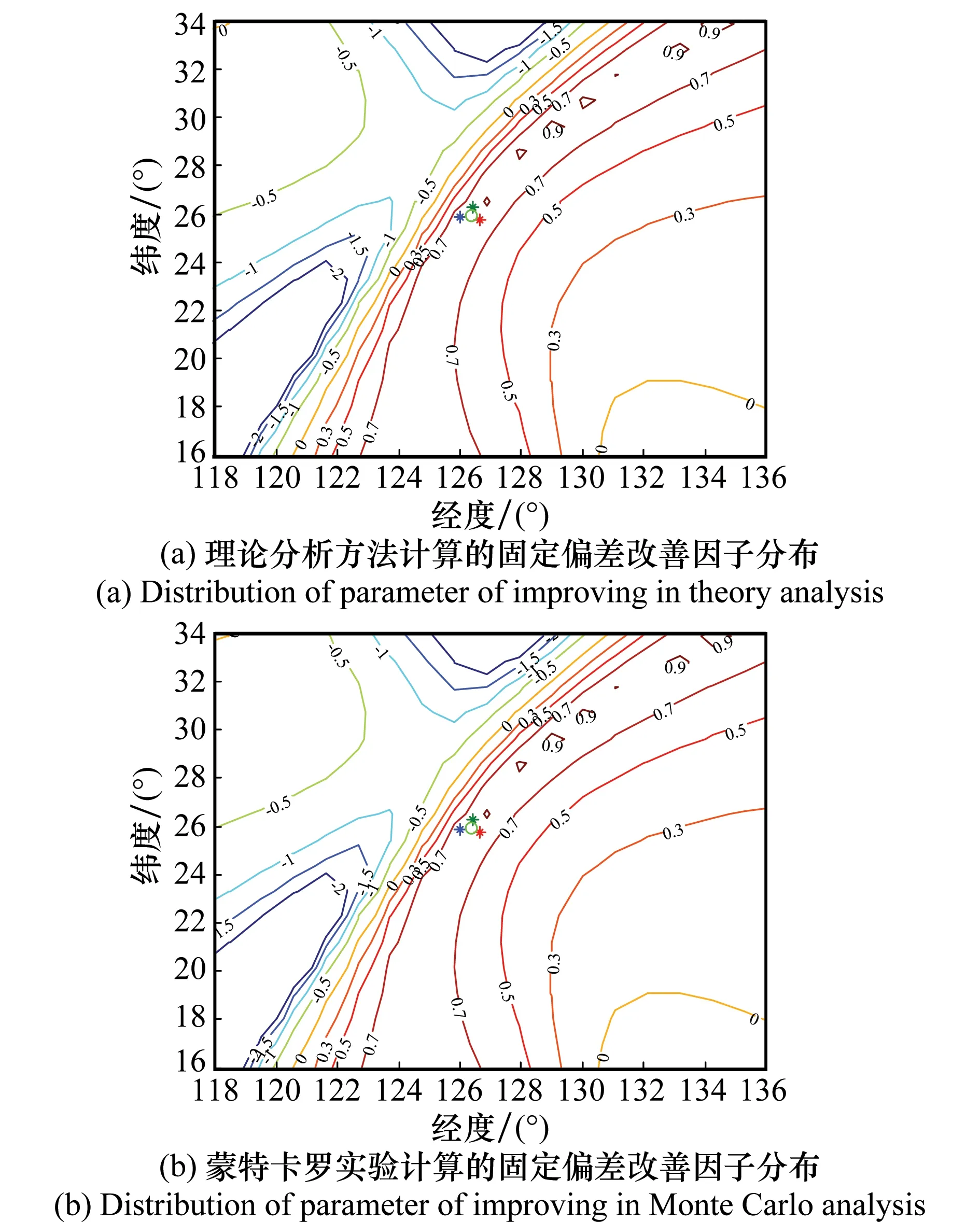
圖6 理論分析和蒙特卡羅實(shí)驗(yàn)計(jì)算結(jié)果比較Fig.6 Comparison between theory analysis and Monte Carlo analysis
(3) 假設(shè)時(shí)差的系統(tǒng)誤差為50ns,時(shí)差的隨機(jī)誤差為10ns,衛(wèi)星位置整體和輔星相對(duì)位置的系統(tǒng)誤差分別為30m和20m,衛(wèi)星位置的隨機(jī)誤差為10m。標(biāo)校源位于星下點(diǎn)中心和距星下點(diǎn)中心646km處時(shí),標(biāo)校定位誤差和固定偏差改善因子分布如圖7所示,標(biāo)校源位于圖中“o”所示位置。
可見(jiàn),標(biāo)校后的定位誤差基本以標(biāo)校源為中心分布。固定偏差改善因子的大致趨勢(shì)為在與標(biāo)校源的連接方向上,隨著軍艦與標(biāo)校源距離的增大,固定偏差改善因子逐漸減小,甚至為負(fù)值。可見(jiàn),以標(biāo)校源為中心存在一個(gè)標(biāo)校范圍,在此范圍內(nèi)標(biāo)校后的固定偏差有所降低;超出此范圍,標(biāo)校后固定偏差反而增大。
(4) 與仿真(3)相同的誤差條件下,標(biāo)校源位于星下點(diǎn)中心,標(biāo)校源位置的系統(tǒng)誤差為200m、隨機(jī)誤差為10m時(shí),標(biāo)校定位誤差以及固定偏差改善因子分布如圖8所示。與圖7(b)進(jìn)行比較可見(jiàn),標(biāo)校源位置存在誤差時(shí),某些位置處固定偏差改善因子增大,某些位置處固定偏差改善因子減小。

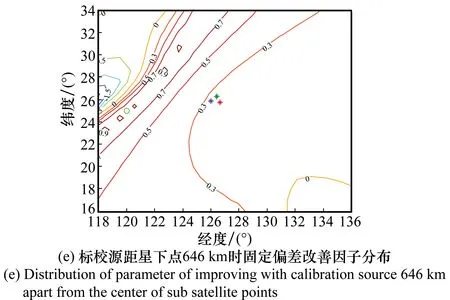
圖7 標(biāo)校源位于不同位置時(shí)的標(biāo)校效果比較Fig.7 Effect of calibration with different calibration source
圖8 標(biāo)校源位置存在誤差時(shí)的標(biāo)校定位效果Fig.8 Effect of error of calibration source on calibration location
(5) 與仿真(3)相同的誤差條件下,選擇一個(gè)待標(biāo)校軍艦,經(jīng)緯度位置為(129°,25.4°),此軍艦距星下點(diǎn)中心270km。假設(shè)標(biāo)校源位于星下點(diǎn)中心,標(biāo)校源位置的隨機(jī)誤差為10m,標(biāo)校后的固定偏差及固定偏差改善因子隨標(biāo)校源位置系統(tǒng)誤差的變化曲線如圖9所示。從圖中可見(jiàn),標(biāo)校源位置的系統(tǒng)誤差分量小于約305m時(shí),固定偏差改善因子大于0,即標(biāo)校后軍艦位置固定偏差減小;標(biāo)校源位置的系統(tǒng)誤差分量小于約174m時(shí),固定偏差改善因子大于50%。因此,標(biāo)校源進(jìn)行有效標(biāo)校的約束條件是:標(biāo)校源位置的系統(tǒng)誤差分量小于305m;固定偏差改善50%對(duì)標(biāo)校源的約束條件是:標(biāo)校源位置的系統(tǒng)誤差分量小于174m。
圖9 標(biāo)校源位置系統(tǒng)誤差對(duì)固定偏差改善因子的影響Fig.9 Effect of system error of calibration source on parameter of improving
4 結(jié) 論
本文首次提出了一種新的標(biāo)校思路,即將具有AIS信息的民用船舶作為有源反射合作目標(biāo)、利用其高精度的位置信息對(duì)時(shí)差型衛(wèi)星定位系統(tǒng)的艦船位置進(jìn)行校正。針對(duì)AIS位置信息無(wú)法直接用于標(biāo)校的問(wèn)題,給出了標(biāo)校源雷達(dá)位置的估計(jì)方法。提出了利用單船舶標(biāo)校源的基于AIS信息的艦船位置標(biāo)校算法,針對(duì)3個(gè)參數(shù)的兩類誤差,建立了標(biāo)校定位誤差分析模型,并對(duì)誤差條件下的標(biāo)校定位效果進(jìn)行了全面深入分析。針對(duì)民船標(biāo)校源位置存在的系統(tǒng)誤差,提出了標(biāo)校源的有效性分析方法,定義了定位位置的固定偏差改善因子,可以定量描述標(biāo)校定位對(duì)目標(biāo)定位精度的改善效果。仿真結(jié)果表明,本文提出的標(biāo)校方法是正確有效的,基于單船舶標(biāo)校源AIS信息的艦船位置標(biāo)校方法可以消除時(shí)差系統(tǒng)誤差引起的定位固定偏差,提高時(shí)差型衛(wèi)星定位系統(tǒng)對(duì)艦船的定位精度,標(biāo)校源的有效性分析方法為標(biāo)校源的選擇提供了依據(jù)。
[1]WangG,ChenH.AnimportancesamplingmethodforTDOAbasedsourcelocalization[J].IEEE Trans. on Wireless Communications, 2011, 10(5):1560-1568.
[2]MartinRK,YanC,FanHH,etal.AlgorithmsandboundsfordistributedTDOA-basedpositioningusingOFDMsignals[J].IEEE Trans. on Signal Processing, 2011, 59(3):1255-1268.
[3]Martin-EscalonaI,Barcelo-ArroyoF,CiuranaM.PassiveTDOAlocationinmobilead-hocnetworks[C]∥Proc.of the IEEE International Congress on Ultra Modern Telecommunications and Control Systems, 2010:1218-1225.
[4]CarevicD.AutomaticestimationofmultipletargetpositionsandvelocitiesusingpassiveTDOAmeasurementsoftransients[J].IEEE Trans. on Signal Processing, 2007, 55(2):424-436.
[5]ObozreniyeV.TheU.S.Navy’s“whitecloud”spaceborneELINTsystem[J].Foreign Military Review, 1993(7):57-60.
[6]FoyWH.Position-locationsolutionsbyTaylor-seriesestimation[J].IEEE Trans. on Aerospace and Electronic Systems, 1976, 12(2):187-194.
[7]TorrieriDJ.Statisticaltheoryofpassivelocationsystems[J].IEEE Trans. on Aerospace and Electronic Systems, 1984, 20(2):183-198.
[8]HoKC,ChanYT.SolutionandperformanceanalysisofgeolocationbyTDOA[J].IEEE Trans. on Aerospace and Electronic Systems, 1993, 26(5):748-753.
[9]MellenG,PachterM,RaquetJ.Closed-formsolutionfordeterminingemitterlocationusingtimedifferenceofarrivalmeasurements[J].IEEE Trans. on Aerospace and Electronic Systems, 2003, 39(3):1056-1058.
[10]ZhongDX,DengXP,ZhouYY.AlocationmethodbasedonWGS-84earthmodelusingsatellitesTDOAmeasurements[J].Journal of Astronautics, 2003, 24(6):569-573.(鐘丹星,鄧新蒲,周一宇.一種基于WGS-84地球面模型的衛(wèi)星測(cè)時(shí)差定位算法[J].宇航學(xué)報(bào),2003,24(6):569-573.)
[11]XieK,ZhongDX,DengXP,etal.Anewalgorithmforthetimedifferencelocationinaerospace[J].Signal Processing, 2006, 22(2):129-135.(謝愷,鐘丹星,鄧新蒲,等.一種空間時(shí)差定位的新算法[J].信號(hào)處理,2006,22(2):129-135.)
[12]WangYG,ChenZL,LiT,etal.Majorsystemerroranalysisbasedontri-satelliteTDOAlocationsystem[J].Journal of Spacecraft TT&C Technology,2010,29(1):85-89.(王瑩桂,陳振林,李騰,等.時(shí)差型衛(wèi)星定位系統(tǒng)的主要系統(tǒng)誤差分析[J].飛行器測(cè)控學(xué)報(bào),2010,29(1):85-89.)
[13]GaoQ,GuoFC,WuJ,etal.Acorrectingalgorithmofsinglereferencesourceforthe3-satelliteTDOAlocationsystem[J].Aerospace Electronic Warfare, 2007, 23(5):5-7.(高謙,郭福成,吳京,等.一種時(shí)差型衛(wèi)星定位系統(tǒng)的校正算法研究[J].航天電子對(duì)抗,2007,23(5):5-7.)
[14]WangYG,LiT,ChenZL,etal.Tri-satelliteTDOAlocationsystem-basedfourstationcalibrationtechnique[J].Journal of Astronautics,2010,31(5):1352-1356.(王瑩桂,李騰,陳振林,等.時(shí)差型衛(wèi)星定位系統(tǒng)的四站標(biāo)定方法[J].宇航學(xué)報(bào),2010,31(5):1352-1356.)
[15]Wikipedia.Automaticidentificationsystem[EB/OL].[2012-08-25].http:∥en.wikipedia.org/wiki/Automatic_Identification_System.
[16]LiuC.Studyofkeytechnologyofautomaticidentificationsystem(AIS)[D].Dalian:DalianMaritimeUniversity,2013.(劉暢.船舶自動(dòng)識(shí)別系統(tǒng)(AIS)關(guān)鍵技術(shù)研究[D].大連:大連海事大學(xué),2013.)
[17]MiguelAC,AlbertoG,KnutE.Satellite-basedvesselautomaticidentificationsystem:afeasibilityandperformanceanalysis[J].International Journal of Satellite Communication and Networking, 2011, 29(10):117-142.
[18]GuerrieroM,WillettP,CoraluppiS,etal.Radar/AISdatafusionandSARtaskingformaritimesurveillance[C]∥Proc.of the IEEE 11th International Conference on Information Fusion, 2008:1-5.
[19]GurgelKW,SchlickT,HorstmannJ,etal.EvaluationofanHF-radarshipdetectionandtrackingalgorithmbycomparisontoAISandSARdata[C]∥Proc.of the IEEE International Waterside Security Conference, 2010:1-6.
[20]ChaturvediSK,YangCS,SongJH,etal.PreliminarytechniquetointegrateSARandAISforshipdetectionandidentification[C]∥Proc.of the IEEE 3rd International Asia-Pacific Conference on Synthetic Aperture Rada, 2011:1-4.
[21]ZhongDX,DengXP,ZhouYY.PrecisionanalysisofsatellitesDTOAlocationbasedonWGS-84ellipsoidmodel[J].Chinese Journal of Electronic Countermeasure Technology, 2002,17(5):18-21.(鐘丹星,鄧新蒲,周一宇.基于WGS-84橢球模型的衛(wèi)星測(cè)量時(shí)差定位精度分析[J].電子對(duì)抗技術(shù),2002,17(5):18-21.)
Position calibration technique of ship based on information of AIS
REN Wen-juan1,2,3, ZHOU Zhi-xin2, Lü Shou-ye2, SHI Dong-feng2
(1. Institute of Electronics, Chinese Academy of Sciences, Beijing 100190, China; 2. Beijing Institute of RemoteSensing,Beijing100854,China; 3.KeyLaboratoryofTechnologyinGEO-SpatialInformationProcessingandApplicationSystem,ChineseAcademyofSciences,Beijing100190,China)
To improve the position accuracy of ship in the satellite location system of time difference of arrival (TDOA), a technique of position calibration based on information of automatic identification system(AIS) is proposed. The warship position can be calibrated by the ship with AIS information acting as a reference source in the method. Firstly, because the position in AIS information cannot be used to calibrate immediately, the method for estimating the radar position of reference source and the error of radar position is raised. Secondly, aiming at the error of reference source position, the model of error analysis and the analysis method for the validity of reference source are found, the calibration accuracy and the capability of improving on position accuracy are analyzed in theory, by which a reference source can be selected. Finally, the validity of the new technique is tested through simulation.
automatic identification system(AIS); time difference of arrival (TDOA); satellite location system of TDOA; calibration; position accuracy; error analysis
2014-11-04;
2015-10-10;網(wǎng)絡(luò)優(yōu)先出版日期:2016-03-07。
中國(guó)博士后科學(xué)基金(2012M521836)資助課題
TN 971.+1
A
10.3969/j.issn.1001-506X.2016.10.23
任文娟(1982-),女,助理研究員,博士,主要研究方向?yàn)闊o(wú)源定位系統(tǒng)信號(hào)與信息處理。
E-mail:renandliang@sina.com
周志鑫(1966-),男,研究員,博士,主要研究方向?yàn)檫b感圖像處理及應(yīng)用、電子偵察信號(hào)處理與應(yīng)用。
E-mail:zhixin.zhou@ia.ac.cn
呂守業(yè)(1979-),男,副研究員,博士,主要研究方向?yàn)闊o(wú)源定位、電子偵察信號(hào)處理。
E-mail:lvshouye@bit.edu.cn
師棟鋒(1981-),男,工程師,碩士,主要研究方向?yàn)闊o(wú)源定位、電子偵察信號(hào)處理。
E-mail:shdf@163.com
網(wǎng)絡(luò)優(yōu)先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20160307.1747.004.html
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會(huì)展(2014年4期)2014-11-27 07:46:46
大眾創(chuàng)業(yè)(2009年10期)2009-10-08 04:52:00
數(shù)字社區(qū)&智能家居(2009年7期)2009-09-29 08:16:48
數(shù)字社區(qū)&智能家居(2009年11期)2009-06-25 04:30:34
數(shù)字社區(qū)&智能家居(2009年3期)2009-04-21 03:09:04
數(shù)字社區(qū)&智能家居(2009年2期)2009-03-27 04:33:44
數(shù)字社區(qū)&智能家居(2009年12期)2009-02-03 07:50:48
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32