可調螺距螺旋槳模糊控制系統的分析及應用
2016-10-14 15:22:39張亞東
船電技術 2016年4期
張亞東,徐 靜
?
可調螺距螺旋槳模糊控制系統的分析及應用
張亞東1,徐 靜2
(1. 中海油田服務股份有限公司,北京101149;2. 遼寧省朝陽供電公司,遼寧122000)
對可調螺距螺旋槳控制系統的進行了分析,給出了模糊控制在可調槳控制系統在螺距調節時的應用,具有很好的實際應用價值。
可調槳 PID控制 模糊控制
0 引言
可調螺距螺旋槳(簡稱CPP 或調距槳),即是通過裝置于槳轂中的執行機構,使得槳葉旋轉而調節螺距的螺旋槳[1]。與定距槳比較,調距槳的槳葉角度(螺距角)可以調節,這就使得船舶的推力方向、大小可以在一定區間內可調節,改善了船舶在不同工況下的操縱性能和推進效率。可調距對控制器的要求也更為復雜和精確。
和傳統的控制理論相比,人們往往將控制器構造在被控制的對象十分精確的數學模型為依據的。相反的是,現實所遇到的情況中系統多數是復雜的,具有強非線性化、干擾性強、具有時變性、且具有時滯性和強耦合等特性。而船舶的運動就是這樣一種情形,由于船、機、槳三者互相耦合,所有船舶是具有非線性和大滯后的對象。這類系統所固有的復雜性、模糊性和其他的因素影響,采用精確的數學模型的傳統控制理論已經很難生效,而模糊控制可以為這類系統更優化的解決方式。
1 可調槳的控制系統的分析
在當今船舶調距槳控制應用領域, PkD控制方式被廣泛應用。隨著船舶自動化水平提升和機動性增強,該控制方式越來越顯現出其只能適用于特殊工況的局限性。當可調槳的運行條件發生改變時,PkD控制方式所設置的參數不能隨意更改,因此往往控制效果并不良好。基于這些因素考慮,依據模糊控制方式在其他實際控制系統中的成功應用的控制算法和經驗加以調整,應用在調距槳控制系統上,使其可以適用于各種復雜運行工況。普遍的可調距槳系統的控制結構如下圖1所示。
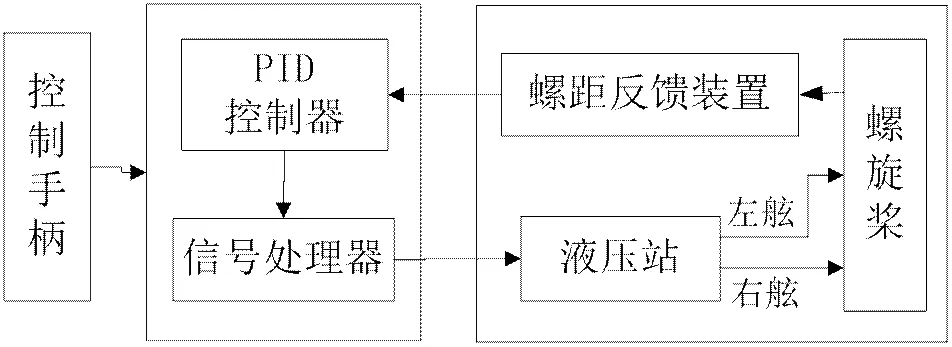
圖1可調槳控制結構示意圖
由于可調槳螺距的控制是十分復雜的過程,所以很難建立精確的數學控制模型。而類似于人類語言信息的模糊控制,有著類似人類的思維,易于理解,設計也更為靈活,且其維護方便。擁有模糊信息的控制規則的控制器(模糊控制器),其控制系統與常規控制系統相比,魯棒性和穩定性強。由于常規的控制系統僅僅通過調節參數來改善控制效果,而模塊控制系統能夠改變控制規則、推理方式、隸屬度函數和決策判定來修正控制系統特性。所以在設計、維修和調整性上模糊控制器更為簡單。在常規控制算法中,微小的錯誤和參數漂移都可能引起系統失控,而基于控制規則的模糊控制系統對某一規則的變化敏感的很小,系統抗干擾能力強[3]。
2 可調槳的模糊控制系統的應用
通過對調距槳的螺距變化過程的分析,螺距大小的變化是決定性的關鍵參數,螺距的改變對應著一定時間段內恒轉速情況下螺旋槳的推力值變化。但是在調距槳推力值的變化和螺距變化并不是線性變化過程,因此對螺距的控制可以采取分段控制方式。
設螺距為P,其誤差為e,誤差的變化率用微分?來表示。依據被控對象的系統誤差及誤差的變化趨勢來消減誤差的模糊原理,建立以e和?為輸入的兩輸入單輸出的模糊控制器。
依據對隸屬度函數采取三角形的結構原理,將螺距誤差e和螺距的誤差微分?均規劃成7個變量的等級(NB,NM,NS,Z,PS,PM,PB)。
通過常見的控制原理結合在實際應用的經驗,可以總結出如下表所示的控制規則。
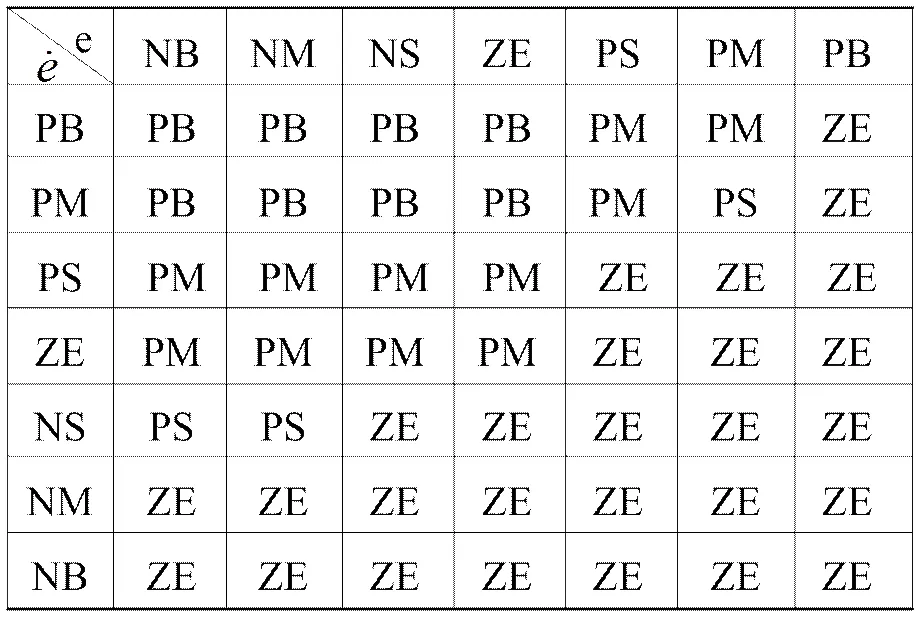
表1 模糊控制規則表
采用重心法來精確處理輸出量,分析輸出量規則,使用離線計算方式處理輸出量,可以得到優化后的控制表。通過模糊量化處理在實際應用中采樣的數據,再結合查表可以得出輸出量。
可調槳螺距的某段控制過程中,穩態時ABS(△P)<1o。
分析可調槳的螺距控制過程,輸入量是影響輸出量的主要因素,因此可以將其他變量視為干擾量。而在上述變量范圍內,在相鄰螺距變化區間的耦合情況最為嚴重。
可以將每段螺距范圍設計為單輸入單輸出的單通道模糊控制器,計算出輸出Uk;然后將其他段螺距控制通道的耦合作用當作干擾。基于剔除干擾的影響處理,可以對相鄰的螺距控制通道采用一個模糊補償做解耦處理。如下:
分析k段螺距控制的控制過程,分析干擾因素,可以得知第k-1段和k+1段對其影響(最后一段沒有k+1段,第一段沒有第k-1段),通過模糊補償處理。用U′k,k-1和U′k,k+1分別來表示第k-1段和k+1段的干擾效果。這樣第k段的螺距控制為:Uk=U′k+ U′k,k-1+U′k,k+1。
令各個螺距控制設定螺距分別為P1,P2,…,Pm;各控制區域的實際螺距分別為P′1(t),P′2(t),…,P′m(t),其中t為時間變量。運用模糊解耦補償控制方法以及U′k,k-1和 U′k,k+1計算方法如下:
第一步將螺距控制過程區分分為m個區間,所以需要建立m個單變量模糊控制器。采用二維模糊控制器,輸入為Ek(t)= Pk- P′k(t),ECk(t)= dEk(t)/dt。模糊控制器的輸入及輸出關系為?(.),那么系統中單變量模糊控制器的輸出為:
U′k=?(Ek(t),ECk(t))
第二步設計解耦模糊控制器,計算該段的U′k,k-1和U′k,k+1,對于第k個螺距控制區,主要的耦合作用是因為從第k-1到k+1控制區的螺距改變,因此可以不考慮其他控制區的作用。
dk,k+1=(Pk+1- Pk)- (P′k+1-P′k)
即為第k+1區與第k區的設定螺距與實際螺距誤差值之差
ek,k+1= P′k-P′k+1
即為第k+1區及第k的實際螺距之差,同理可以得知第k-1及第k區的關系。
dk,k-1=(Pk-1- Pk)- (P′k-1-P′k)
ek,k-1= P′k-P′k-1
于是,解耦模糊控制算法可描述如下
kf(dk,k+1and ek,k+1) then U′k,k+1
kf(dk,k-1and ek,k-1) then U′k,k-1
把隸屬度函數分解為三角形,對dk、ek、U′k,k+1、U′k,k-1均劃分為7個變量等級(NB,NM,NS,Z,PS,PM,PB)。
可以根據相關的試驗總結推出模塊控制推理表如表2。
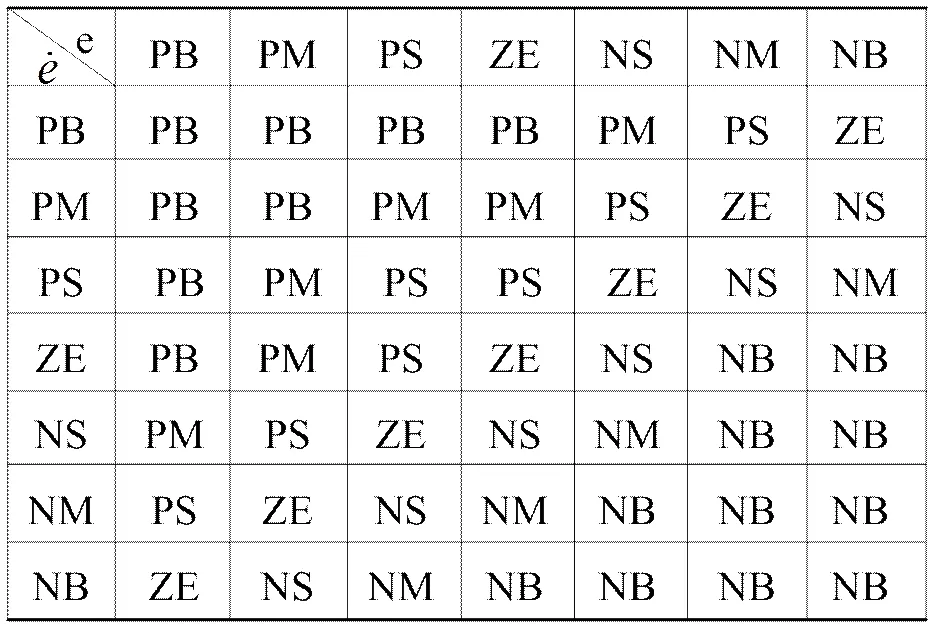
表2 模糊補償規律表
目標區間螺距誤差和前后區間螺距誤差之間的差距用參數dk來表示,當參數dk為正時表示第k區間螺距的誤差比前后區間大,則第k區間和相鄰區間相比其模糊控制輸出大;上一區間實際螺距和前后區間螺距實際值之差可以用參數ek來表示,當參數ek為正時表示第k區間實際螺距的誤差比相鄰區間實際螺距高,則第k區間的變化趨勢會影響相鄰通道螺距的變化。可以得出結論,當dk和ek越大,則第k區間的螺距控制補償就要求越大;同理可知,若dk和ek越小,則第k區間的螺距控制補償要求越小,即可滿足上述規則。這些規則是符合人的思維和可調槳螺距控制對象的物理意義的。可以根據模糊控制語言做出判斷:
kf(dk,k+1ks PB and ek,k+1ks PB) then U′k,k+1ks PB;
kf(dk,k+1ks NB and ek,k+1ks NB) then U′k,k+1ks NB;
kf(dk,k-1ks PB and ek,k-1ks PB) then U′k,k-1ks PB;
kf(dk,k-1ks NB and ek,k-1ks NB) then U′k,k-1ks NB;
第三步:對模糊控制器進行解耦得出輸出值Uk:
Uk=U′k+ U′k,k-1+U′k,k+1
當前段作為是第一段時則
Uk=U′k+U′k,k+1
當前段作為最后一段時則
Uk=U′k+ U′k,k-1
將上述算法中的U′k,k-1和 U′k,k+1設解耦項,可以由模糊算法得出解耦補償控制。模糊控制器的解耦處理由對應的算法完成,相應的處理方式如圖2所示。
結束語
從采用模糊控制對調距槳的槳角控制分析來看,模糊控制可以有效地改善系統的動態控制特性,減小調節的時間和提高控制精度。在船舶可調槳的應用上,模糊控制策略能夠適用于各種復雜的條件,具有良好的市場推廣前景。
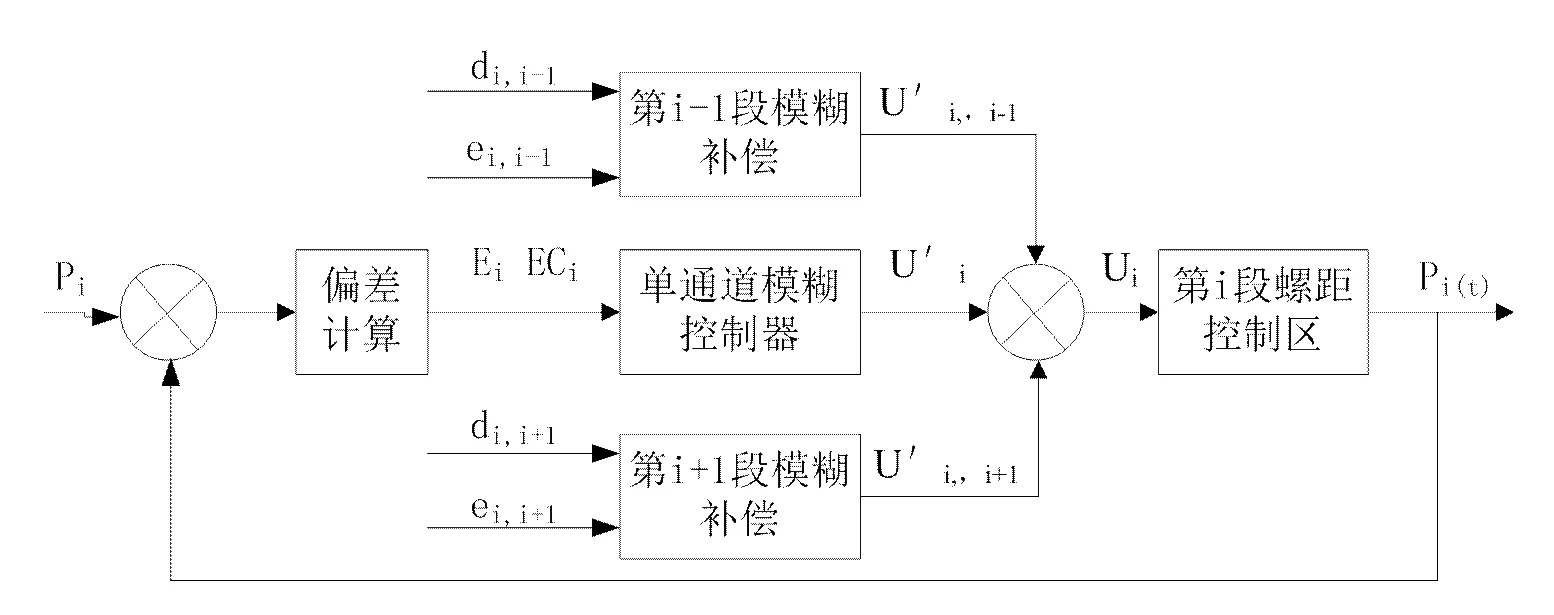
圖2 可調槳螺距控制模糊解耦控制器結構示意圖
[1] 龐 濤, 何祖軍, 孫明平. 可調螺距螺旋槳推進特性分析及控制系統研究[J]. 計算機測量與控制, 2006. 14(2): 188-190.
[2] 高 健, 李 眾, 石建華, 等. 可調螺距螺旋槳模糊控制系統[J]. 船舶工程, 2000(1): 32-34, 48.
[3] 彭勇剛. 模糊控制工程應用若干問題研究[D]. 浙江大學. 2008: 104-113.
[4] 吳東興, 李 眾, 李 彥. 可調螺距螺旋槳船舶航速模糊控制系統[J]. 華東船舶工業學院學報, 2001(6): 25-28.
Analysis and Application of Fuzzy Control for Controllable Pitch Propeller
Zhang Yadong1, Xu Jing2
(1. China Oilfield Services Limited , COSL, Beijing 101149, China; 2. Chaoyang Electric Power Company, Liaoning 122000, China)
The controllable pitch propeller control system are analyzed, and fuzzy control is given when the adjustable blade control system in pitch control applications. The result is of valuepractical application.
adjustable paddle; PID control; fuzzy control
TP273
A
1003-4862(2016)04-0007-03
2015-11-04
張亞東(1974-),男,工程師。專業方向:海洋工程裝備。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
幸福(2018年33期)2018-12-05 05:22:42
Coco薇(2017年11期)2018-01-03 20:59:57
中國船檢(2017年3期)2017-05-18 11:33:09
暨南學報(哲學社會科學版)(2016年9期)2017-01-15 13:52:02