海浪環境對航行體出水特性影響研究
2016-10-14 14:00:30周敬國權曉波程少華
導彈與航天運載技術 2016年3期
周敬國,權曉波,程少華
?
海浪環境對航行體出水特性影響研究
周敬國1,權曉波2,程少華2
(1. 海軍裝備部,北京,100073;2. 北京宇航系統工程研究所,北京,100076)
海浪環境對航行體出水過程具有較大影響,是當前流體動力研究的熱點問題。通過分析國內外海浪環境及其對出水航行體特性的影響,介紹了海浪環境相關研究成果,而后從理論分析、數值仿真、水下控制等方面總結了海浪對航行體出水特性影響的計算方法,并對后續發展和研究方向進行了討論。
水下航行體;海浪;空泡
0 引 言
海浪是海水運動的重要形式之一,組成海浪的水質點做周期性的往復振蕩運動,在時間和空間上交替出現的波動現象。對于水下航行體而言,波浪載荷是其所受外力的重要組成部分,并對航行體結構及運動軌跡造成影響。特別是當航行體涉及出水運動時,海浪水質點速度較大,波浪載荷對航行體浸沒區受力的影響起到主要作用,從而直接決定其水下受力特性與運動軌跡。波浪載荷作用下航行體出水特性是開展水下航行體設計的基礎。
近年來隨著海軍對實戰化能力要求的不斷提高,航行體對復雜海洋環境的適應能力受到越來越多的關注。然而,海洋環境對航行體出水運動的影響具有較大的工程設計難度,一方面自然界中存在的海浪變化特性十分復雜,海浪呈現出高低、長短雜亂無章的特征,航行體出水時海浪自由界面具有較大的隨機性;另一方面航行體在穿越自由液面的過程中,同時處于氣、水2種不同的介質中,在較短的時間內將承受劇烈變化的力和力矩,航行體受力具有明顯的非線性和非定常特性[1,2]。波浪隨機性對出水航行體非線性受力的影響研究,已經成為流體力學領域研究的熱點問題。
本文針對波浪對航行體的出水運動影響研究問題,介紹了目前海洋環境的相關研究成果,分析了常用的海浪影響下航行體出水計算方法,總結了海浪對航行體流體動力、彈道、水下控制方面的研究內容,對后續的發展和研究方向進行了展望。
1 海浪環境
建立可反映真實海浪的波浪模型是準確確定波浪載荷的前提。對于復雜的海浪波動現象,通過不斷地將實際觀測值和理論值相比較、修正,形成有效的海浪理論模型、實現對海浪環境的準確預報,是海洋環境研究的重要工作內容[3]。伴隨著航海的發展和遠洋資源的開發利用,人類對于海洋、波浪的研究取得了很大的進展,形成了基于線性邊界條件假定的有限振幅水波理論和基于具有各態歷經性的平穩隨機過程假定的隨機海浪理論。
有限振幅水波理論將海浪運動視為確定的函數形式,通過流體動力學分析揭示各種情況下海浪的動力學性質和運動規律。通過建立線性波、Stokes波、余弦波、孤立波理論等多種解析方法來分析波浪中流體的運動規律和參數分布等,構成海浪環境對航行體水下運動研究的理論基礎。
線形波模型最初由Airy于1845年提出,又稱為Airy波理論,也被稱作正弦波(或余弦波)。線性波波浪要素如下所述。
速度勢函數:
波面方程:
(2)
色散方程:
由速度式函數式(1)可求得一階近似的速度場為

(5)
式(3)為色散方程,其規定了波浪的頻率與波數之間的關系,即確定了波長與波浪周期之間的關系。
在極限情況下對于無限深度的水質點而言,波浪的速度勢函數可表述為
線性波理論是各種波浪理論中最為基本的理論,其概念清晰,公式簡明,運用方便,在海洋與海岸工程研究中被廣泛應用,并解決了許多相關工程問題。與此同時,線性波理論還被應用到非規則波的波譜理論當中,用于生成非規則波。因此,說線性波理論是一種應用面較為廣泛的波浪理論,在波浪理論中占有相當重要的地位,線性波不同相位下波浪速度方向如圖1所示。
圖1線性波不同相位下波浪速度方向示意
隨機海浪理論將海浪運動視為隨機過程,通過隨機過程理論分析給出各種情況下海浪運動的統計特性。將海浪波動視為由無限多個頻率不等、方向不同、振幅變化而相位雜亂的有限振幅水波疊加而成的不規則波系。其波面方程可以表示為
觀測數據的積累、海浪統計理論的建立以及風浪生成、耗散、非線性波相互作用理論研究的深入為隨機海浪環境的建模奠定了基礎[4]。從目前應用廣泛性上來看,對隨機海浪模型的研究主要采用海浪譜經驗描述方式,這也為隨機海浪對航行體出水過程的研究提供了模型手段。
自20世紀50年代初Pierson等人率先將頻率譜分析方法應用于海浪,利用隨機譜描述海浪成為主要研究途徑;Phillips利用量綱分析方法得到5指數形式的高頻頻率譜;Pierson和Moskowitz利用北大西洋的觀測數據導出了P-M譜,把Phillips方法擴展至整個海浪譜段;德國、英國、美國和荷蘭等國有關組織于1968~1970年進行的“聯合北海波浪項目”是一次迄今最系統的海浪觀測工作,在此工作的基礎上提出JONSWAP譜;1990年中國文圣常教授基于能量平衡方程提出文圣常譜。從總體上來看,目前各種譜模型都是依據世界不同海區的觀測資料而得到的具有一定經驗性質的譜表達式,由于采用的方法、數據源不同,各種波浪譜之間差別較大,而且波浪譜的形式直接影響動力計算結果。因此,在實際使用時有必要對國內外各種典型波浪譜的適用性加以分析和選擇。目前,適用范圍較為廣泛的為P-M譜,其表達式為

2 海浪環境對水下航行體運動特性影響
2.1 海浪對航行體運動特性影響計算方法
海浪環境對水下航行體運動特性的計算方法,可以追溯至1955年Korvin-Kroukovsky切片概念的提出和Morison計算柱體在海浪環境中載荷經驗公式,到了20世紀70年代,切片理論的研究常采用多極展開法與源分布密切擬合的勢流計算方法。近年來,隨著計算技術的發展,更多的是采用求解常微分方程與N-S方程耦合的全三維方法[5~7]。
在海洋工程設計中,通常采用Morison公式計算小構件的波浪載荷。Morison于1950年在模型試驗的基礎上,提出計算垂直于海底的剛性柱體上的波浪載荷計算公式。該公式假定柱體的存在對波浪運動無顯著影響,認為波浪對柱體的作用主要是粘滯效應和附加質量效應。Morison公式給出豎直圓柱單位長度上受到的水平波浪力為
Morison公式物理概念清晰、簡便實用,但其計算精度將受到試驗或經驗系數的影響,特別是水下航行體尺寸大到一定程度時,Morison公式的適用性需要進一步研究。在此基礎上,勢流理論由于其計算精度和可靠性較高在波浪對船舶運動影響研究中獲得廣泛應用,出現了切片法、STF方法、二維半方法等[8,9]。針對海浪影響下水下航行體出水過程,一般忽略自由液面效應,且由于航行體直徑遠小于海浪波長,僅考慮入射波的影響,基于海浪理論開展海浪對航行體運動及受力特性影響研究。
上述方法由于采用流場的相關假設,將波浪條件下復雜流場壓力分布結構處理成解析解或經驗公式的方式,具有主要特征突出、計算效率高等特點,是目前開展規則波和隨機海浪對全濕流航行體出水特性研究的主要技術手段。但由于未能考慮海水粘性、表面張力的影響,計算的可信度尚需要通過試驗進行進一步驗證,且在涉及帶空泡航行體出水問題時存在較大的局限性。
隨著數值計算方法的不斷發展,通過N-S方程的數值造浪手段模擬海面波浪的流場,并結合動網格技術實現航行體在帶波浪水面下運動的模擬,為解決波浪環境下航行體水下受力與運動問題提供了更為可靠的計算手段。數值造波是采用數值仿真手段研究海浪環境對水下航行體運動特性影響的基礎。通過數值造波,可在求解域內實現試驗所需要的各種形式的波浪場,例如線性波、二階Stokes波以及非規則波等。常用的數值造波方法包括搖板造波法、源項造波法、邊界造波法等。
搖板造波法屬于仿物理造波法,即在數值水池中模仿真實試驗水池中的造波機,將其設置為擾動源。He等在二維數值水槽中應用數值搖板造波機模擬了強非線性波浪[10],Finnegan等將造波機理論應用于波浪-結構物相互作用的數值計算中,取得了較為滿意的結果[11]。
搖板造波法原理簡單,可通過試驗手段進行檢驗,但其涉及動網格技術以及結構化與非結構化網格相結合的混合過程,造波過程相對復雜,對計算機性能要求較高。
源項造波法和邊界造波法同屬純數值造波法。Brorsen等基于邊界積分方程勢流方法(BIEM)實現了源項造波,生成了二維非線性波浪[12];Lee等提出的適用于不同形式的Boussinesq方程的源項造波法,分析了波浪傳播的變形問題[13]。源項造波法適應性強,但由于其造波方式較為理想化,無法在現實中予以實現。邊界條件法是根據波浪的解析理論,在固定邊界上給定數值入射速度,齊鵬等采用這種方法通過求解N-S方程建立三維下數值波浪水槽[14]。邊界造波法受控波面的邊界條件可用單一的方程給出,可較容易地控制所造波浪的頻率、振幅,在三維模式中應用較為有效。
典型狀態下邊界造波法邊界條件設置如圖2所示。
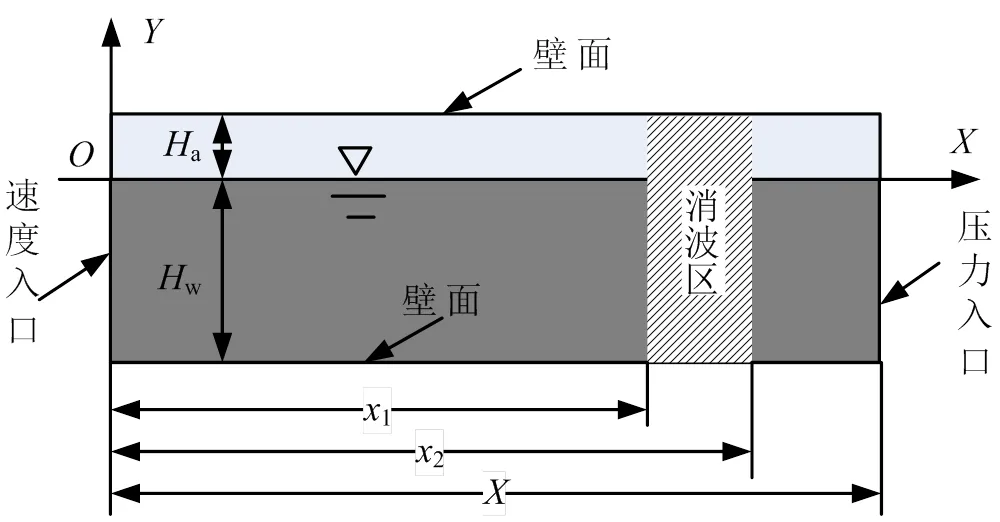
圖2 邊界造波法邊界條件設置
圖2中,空氣域高度a=0.25,為對應浪級下波長;水深w=0.75;為水槽長度,=4;1為消波區起始位置,1=3.0;2為消波區結束位置,2=3.5;水槽入口采用速度入口邊界條件,出口采用壓力出口邊界條件,上下均為滑移壁面邊界條件。源項造波法邊界條件設置與邊界造波法相似,不同之處在于源項造波法入口邊界處需要單獨定義一個造波區域。
在二維條件下對邊界造波法、源項造波法與Stokes理論波形進行比較,其中數值造波法氣、水界面通過VOF模型進行模擬,湍流模型選用標準模型,采用結構化網格劃分。數值造波方法與理論計算結果比較如圖3所示。
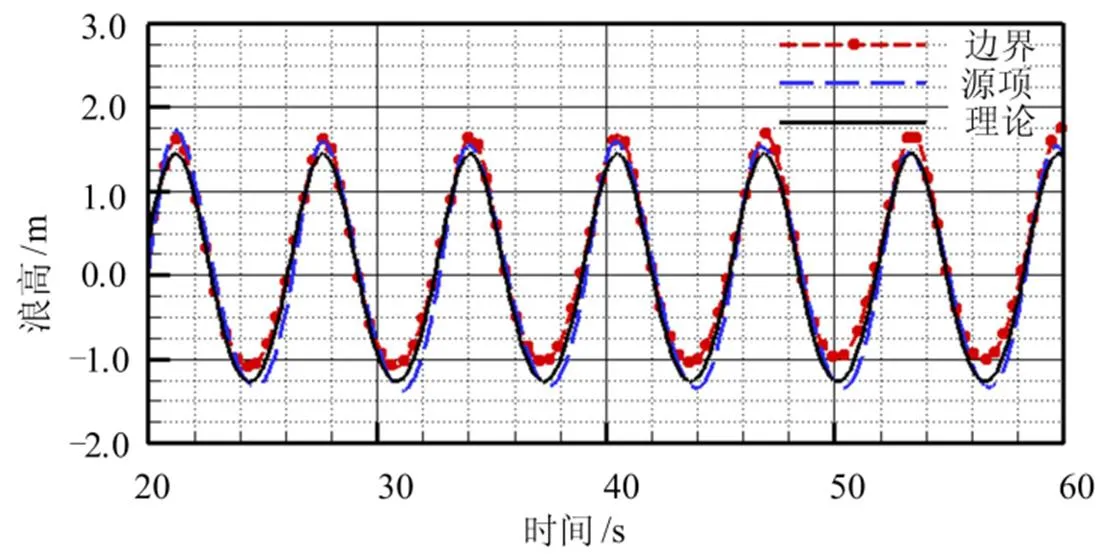
圖3 數值造波方法與理論計算結果比較
由圖3可以看出,數值造波波形與理論計算結果基本一致,Stokes波理論解是在液體無粘、無旋假設前提下通過攝動法得到的,而波浪數值仿真中則考慮了液體的粘性作用,通過N-S方程求解得到,因此數值造波(邊界造波法、源項造波法)波高較理論波高有一定的偏差。
在數值造波基礎上,可進一步開展波浪對水下航行體出水過程的三維流場結構、動力學特性、運動軌跡的數值仿真研究工作。某航行體在波浪中運動示意如圖4所示。
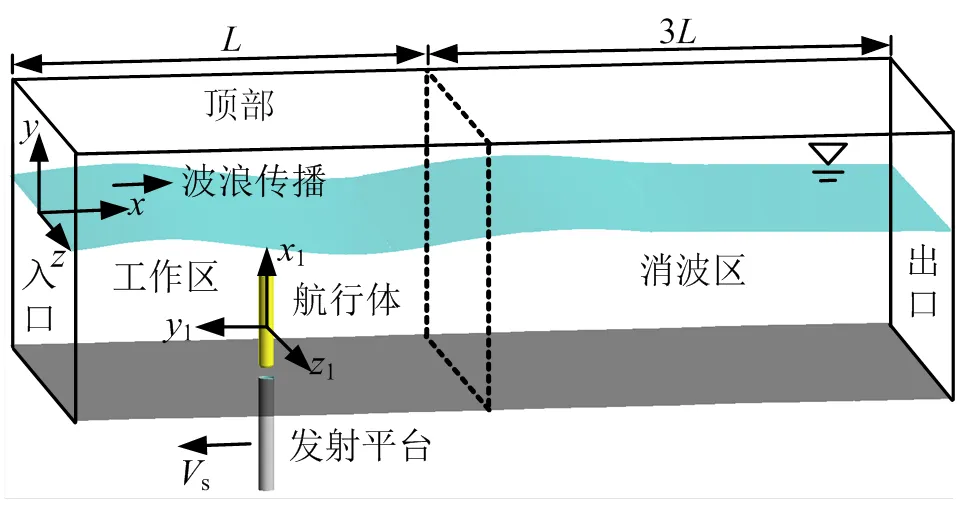
圖4 航行體在波浪中運動計算域
由圖4可知,該船行體設有工作區(造波區)和消波區,在一定運動速度發射平臺上運動。
2.2 海浪對航行體水動力和運動特性影響
在航行體出水運動過程中,海浪對航行體水動力系數(包括定常力、慣性力等)均產生明顯的影響,且隨著航行體各截面依次出水,航行體所受流體動力急劇變化,導致出水彈道變化特征較為復雜。
在理論計算方面,可快速獲得海浪浪高、浪向、出水相位對流體動力及彈道的影響規律,從而為水下彈道的設計提供依據。楊繼鋒等[15]將航行體離散化為多個表面單元,根據線性波理論和Morison公式計算各單元所受的波浪力,從而開展不同浪級和浪向下航行體出水姿態的計算,計算結果表明波浪對航行體的影響主要包括波浪力和波浪水質點引起的流體俯仰力矩兩個方面,高艇速下運動時需盡可能在低海情下發射;谷良賢等[16]采用波浪受力的切片理論,分別計算在線性波理論下和隨機海浪P-M頻譜下海浪對水平發射運載器出水彈道和出水姿態的影響,計算結果表明隨機海浪干擾下出水姿態角服從高斯分布,線性波海浪干擾彈道設計較隨機干擾的彈道設計相對保守;王亞東等[17]采用隨機海浪P-M頻譜和切片理論獲得航行體所受波浪力,并采用蒙特卡洛方法分析隨機海浪下航行體彈道偏差量統計值,表明海況越高,偏差量越大;王瑞臣等[18]利用LS-Dyna有限元軟件對航行體進行離散化,研究了線性波海浪對導彈水下運動姿態的影響,計算結果表明淺水發射下波浪影響比深水發射更為明顯。
在數值CFD計算方面,可通過數值仿真計算獲取波浪影響下流場變化規律和航行體運動特性,其中氣、水界面選用VOF模型、湍流模型選用標準模型,利用動網格技術、UDF技術可在CFD軟件中實現航行體在波浪環境下運動的數值模擬。提取某典型工況下波谷、波峰出水時航行體周圍流場流線圖,如圖5所示。
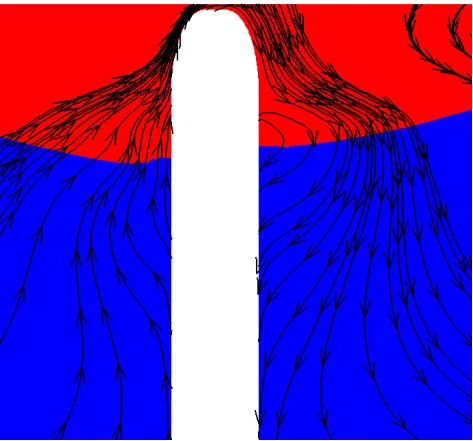
圖5 航行體波谷、波峰出水時的流線
從圖5可以看出,在波谷出水時,波浪水質點呈現回旋運動趨勢,在水下流線向左側運動,此時航行體受到的波浪力沿左側方向,且由流線密集程度可以看出航行體頭部流速較大,所受流體力也相對較大;波峰出水時航行體受力方向正好與波谷出水相反。
權曉波等[19]為了研究水下航行體出水過程中海浪的影響,首先通過源項造波法模擬出精度較高的二階Stokes非定常數值海浪,之后考慮5級海浪干擾條件,分析鈍頭圓柱體航行體水下垂直發射時波浪對三維流場、彈道及受力特性的影響,并與無波浪條件下的分析結果進行對比,獲得波浪對航行體運動速度變化的影響規律。針對更為復雜的帶空泡航行體波浪影響問題,程聞等[20]采用源項造波法建立了二維數值水槽,采用動網格方法實現波浪環境下水翼運動時空泡非穩態特性的模擬,計算結果表明當水翼處于逆浪波谷狀態時,波浪速度場方向與水翼空泡末端回射流方向相同,使得空泡斷裂和脫落時間提前,且空泡脫落頻率隨波高增加而增加。朱坤等[21]通過數值CFD手段對不同波浪相位出水條件下帶空泡航行體流場特性開展研究,獲得了近水面波浪與潛射導彈空泡耦合流動機理,結果表明出水波浪相位的差異導致近水面流體質點剪切運動的強弱與方向是導致航行體肩空泡空間不對稱的重要因素。
數值CFD計算方法通過對整個計算域內壓力的分布特性開展計算,計算結果相對精細,且可實現對空泡流等復雜流動現象的準確模擬,是未來開展波浪對航行體出水過程研究的重要技術手段。
2.3 海浪環境下彈體運動特性的控制技術
航行體出水過程是在較短的時間內穿越自由界面過程,在自由界面附近波浪水質點運動速度較為劇烈,使得航行體表面各位置承受大小不等的波浪力作用,且由于受出水相位的影響,波浪力呈現出一定的隨機性。波浪浪級越高,波浪力越大,從而給航行體結構載荷和彈道造成較大的影響,在高海情下垂直運動的航行體一般采用水下有控的技術方式。
由于航行體多為軸對稱結構,縱向運動是其主要運動平面。在流體動力、重力、浮力、控制力作用下,航行體的速度和姿態不斷發生變化。水下有控彈道在縱向平面的方程:
由水下航行體垂直發射特點可知:
a)航行體在水中航行體時由于尾空泡的周期性振蕩導致難以準確建模;
b)在出水段隨著航行體各截面出水急劇變化;
c)水下運動時間較短,對快速性要求較高;
d)控制力受限。

水下產生控制力的方式主要有推力矢量控制、柵格翼控制等。推力矢量控制方式主要是通過改變航行體發動機尾部噴流方向的方式控制導彈水下運動,可分為擺動噴管、擾流片、燃氣舵、側噴等具體實現方式。美國潛射戰斧、法國飛魚等導彈均采用水下推力矢量控制方式,其特點是依靠彈上發動機提供控制力來克服流體干擾力,在流體干擾力較大時對推力矢量特性設計要求較高。柵格翼控制方式是通過在航行體尾部安裝柵格翼結構,從而使得壓心后移,有利于提高惡劣海浪環境下彈道的穩定性。俄羅斯Club系列潛射導彈采用柵格翼控制方式,其特點是通過改變水動外形實現對流體干擾力的抑制作用,但需要增加柵格翼機構,導致水下阻力增大。
針對海浪非線性不確定外力,常用的控制方法有PID控制、最優控制、模糊變結構控制等。崔乃剛等[22]針對復雜海洋環境下潛射導彈出水問題,獲得不同海浪參數影響下無控、PID控制以及模糊PID分段控制3種方法在不同海況下的仿真結果,丁彥超等[23]在“小擾動”假設條件下采用最優控制方法實現對垂直發射潛射導彈的推力矢量控制,仿真結果表明該控制方法可有效地抑制波浪對彈道的擾動影響。從各種控制方法上來看,彈體出水過程中流體動力變化劇烈且波浪干擾力具有較大的隨機性,模糊變結構控制方法主要依賴當前彈道狀態參數,對于復雜海浪下出水問題具有較好的適應性。
3 后續研究方向
a)隨機海浪譜作用下航行體運動數值仿真研究。
數值仿真方法作為海浪研究的重要手段,其計算可信度相對較高,但對計算資源和工作時間要求也較高。目前對數值仿真中的波浪仍作為理想的規則波模型,對隨機海浪譜特性下航行體數值仿真計算尚未涉及。可探索采用數值仿真和代理模型技術相結合的方法,建立波浪要素對航行體流體動力特征的理論預示模型,從而開展隨機海浪譜下航行體影響數值仿真計算。
b)海浪對航行體出水結構動力學特性影響研究。
從勢流理論上來看,海浪改變了航行體出水過程中的勢函數,從而對附加質量等水下結構動力學參數造成一定的影響;另外,流固耦合現象、水彈性現象在波浪環境下呈現出新的特征,需要對其開展深入的研究。
c)真實海浪作用下航行體運動特性評估。
針對船舶等水面兵器在波浪環境運動特性的評估相對較為成熟,形成了較為完整的波浪載荷的時域和頻域、耐波性設計等理論、試驗手段。而針對潛射導彈、出水魚雷等波浪影響評估理論相對較少,對波浪環境的適應能力尚需要借鑒船舶領域相關理念,實現對復雜波浪環境下航行體實際作戰效能的有效評估。
[1] Clinton P S. Studying the effects of an ocean environment on the underwater launching of ballistic missile[M]. New York: Lockheed Missiles and Space Company, 1962.
[2] 鄭幫濤. 潛射導彈出水過程水彈道及流體動力研究進展[J]. 導彈與航天運載技術, 2010(5): 8-11.
[3] 許富祥. 海浪預報現狀與未來[J]. 海洋預報, 2005, 22(S1): 172-175.
[4] 管長龍. 我國海浪理論及預報研究的回顧與展望[J]. 青島海洋大學學報(自然科學版), 2000, 30(4): 549-556.
[5] Jeans T L, Baker C R, Holloway A G, et al. A critical review of classical force estimation methods for streamlined underwater vehicles using experimental and CFD Data[C]. Houston: Proceedings of the ASME Fluid Engineering Division Summer Conference. 2005.
[6] Moran J P. The Vertical water-exit and entry of slender symmetric bodies[J]. Journal of the Arospace Science, 1964, 2(8): 803-812.
[7] Korvin-Kroukovsky B V. Investigation of ship motions in regular waves[M]. Washington: SNAME, 1955.
[8] 戴遺山, 段文楊. 船舶在波浪中運動的勢流理論[M]. 北京: 國防工業出版社, 2008.
[9] 戴仰山, 沈進威, 宋競正. 船舶波浪載荷[M]. 北京: 國防工業出版社, 2007.
[10] He W, Duan W. Fully nonlinear calculation of 2-D water wave generated by rocker flap wavemaker[J]. Journal of Hydrodynamic, 1996(1): 52-59.
[11] Finnegan W, Goggins J. Numerical simulation of linear water waves and wave-structure interaction[J]. Ocean Engineering, 2012(43): 23-31.
[12] Brorsen M, Larsen J. Source generation of nonlinear gavity waves with the boundary integral equation method[J]. Coastal Engineering, 1987(11): 93-113.
[13] Lee C, Yum C K. Internal generation of waves for extended boussinesq equations[J]. Coastal Engineering, 2001(42): 155-162.
[14] 齊鵬, 王永學. 三維數值波浪水池技術與應用[J]. 大連理工大學學報, 2003(6): 825-830.
[15] 楊繼鋒, 劉勇志, 劉丙杰, 等. 海浪對水下垂直運動航行體出水姿態的影響分析[J]. 海洋技術學報, 2015, 34(2): 59-63.
[16] 谷良賢, 李軍政. 海浪對運載器姿態的影響研究[J].西北工業大學學報, 1997, 15(4): 523-527.
[17] 王亞東, 袁緒龍, 張宇文等. 波浪對導彈垂直發射水彈道影響研究[J].兵工學報, 2012, 33(5): 630-635.
[18] 王瑞臣. 海浪對導彈出水姿態影響數值分析[J]. 青島大學學報(工程技術版), 2010, 25(1): 28-31.
[19] 權曉波, 孔德才, 李巖. 波浪模擬及其對水下航行體出水過程影響[J].哈爾濱工業大學學報, 2011, 43(3): 140-144.
[20] 程聞, 魯傳敬, 曹嘉怡. 波浪對水翼非穩態空泡流動特性的影響研究[J].水動力學研究與進展A輯, 2011, 26(6): 763-769.
[21] 朱坤, 陳煥龍, 劉樂華, 等. 波浪相位對航行體出水過程水動力特性的影響[J]. 兵工學報, 2014, 35(3): 355-361.
[22] 崔乃剛, 曹春泉, 韋常柱. 潛射導彈水下運動過程仿真分析[J]. 彈道學報, 2009, 21(2): 95-99.
[23] 丁彥超, 王寶壽. 垂直潛射導彈推力矢量控制彈道仿真研究[J]. 船舶力學, 2011, 15(1): 87-94.
Review of Wave Influence to the Water Exit for Underwater Vehicle
Zhou Jing-guo1, Quan Xiao-bo2, Cheng Shao-hua2
(1. Naval Equipment Department, Beijing, 100073; 2. Beijing Institute of Aerospace System Engineering, Beijing, 100076)
The marine environment had an important impact on the underwater vehicle during water exit, which was a hot topic in the current hydrodynamics research area. According to analyse the wave influence to the water exit for underwater vehicle. Some research results for the marine environment were introduced. Then calculate methods for underwater vehicle in the wave envorionment were summarized from three aspects, theoretical anaylsis, numerical simulation as well as underwater control. The fureture development and research direction were discussed.
Underwater vehicles; Ocean wave; Cavity
1004-7182(2016)03-0044-06
10.7654/j.issn.1004-7182.20160311
TJ762.4
A
2016-03-30
周敬國(1962-),男,高級工程師,主要從事水下航行體總體設計研究
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
當代陜西(2022年5期)2022-04-19 12:10:18
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:28
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
當代陜西(2021年2期)2021-03-29 07:41:24
汕頭大學學報(自然科學版)(2020年4期)2020-12-14 07:05:00
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24