基于Cruise的純電動物流車動力系統仿真
2016-10-14 06:41:16許同盟楊萬國焦亞男
汽車電器 2016年9期
雷 騰,許同盟,李 鋒,楊萬國,王 強,焦亞男
(1.山東大學機械工程學院,山東 濟南 250000;2.山東五征集團有限公司,山東 日照 276800)
基于Cruise的純電動物流車動力系統仿真
雷騰1,2,許同盟1,2,李鋒2,楊萬國2,王強2,焦亞男2
(1.山東大學機械工程學院,山東 濟南250000;2.山東五征集團有限公司,山東 日照276800)
基于Cruise軟件的仿真分析來模擬城市工況,對純電動物流車動力系統的關鍵參數進行分析,驗證設計的合理性。
純電動物流車;動力系統;仿真分析;Cruise
近年來霧霾侵襲導致全國大部分地區PM2.5嚴重爆表,環境污染成為人們關注的焦點,機動車尾氣也是城市環境污染來源之一。隨著國家對排放要求的升級,綠色交通的概念開始推廣,城市物流車擔負著城市運輸的重任,自然對排放等級要求更加嚴格。開發一款純電動物流車型來代替燃油車,不僅為城市環境帶來改善,而且復雜的城市交通情況更能發揮純電動汽車的優勢。
1 純電動物流車整車參數及性能指標要求
城市物流運輸車型必須要有良好的動力性能,才能適合城市道路的運輸工況。本文設計的純電動物流車型性能、參數指標見表1和表2。
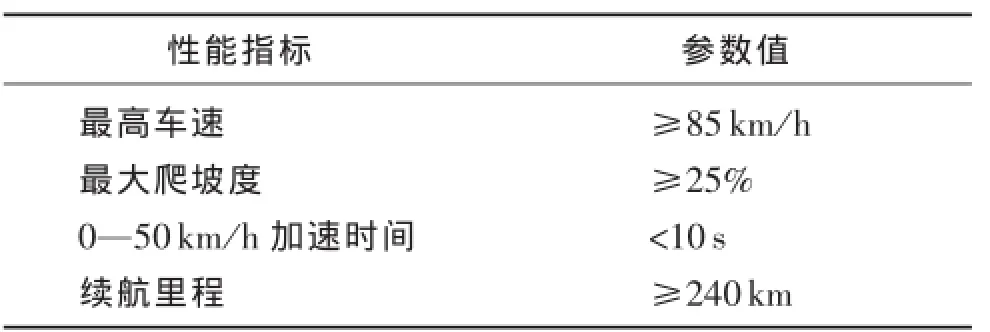
表1 純電動物流車性能指標
2 動力系統參數匹配設計
純電動汽車的動力性主要取決于動力及傳動系統參數匹配,包括動力電池、驅動電機及傳動系統控制器等部件[11],其評價指標最常用的參數有:最高車速、最大爬坡度和加速時間[22]。作為一款城市市內物流運輸車型,對車速和加速時間要求比較高,需要選擇合適的驅動電機。所選驅動電機的功率越大,整車的動力性能也就越好,但還要兼顧到產品的使用經濟性和開發成本等因素。因此,針對設計目標合理的匹配電機參數,所選用的驅動電機功率應能滿足電動汽車對最高車速、最大爬坡度以及加速時間的要求[33]。需要確定其額定功率PPee、峰值功率PPmmaaxx、最大轉矩TTmmaaxx等參數。
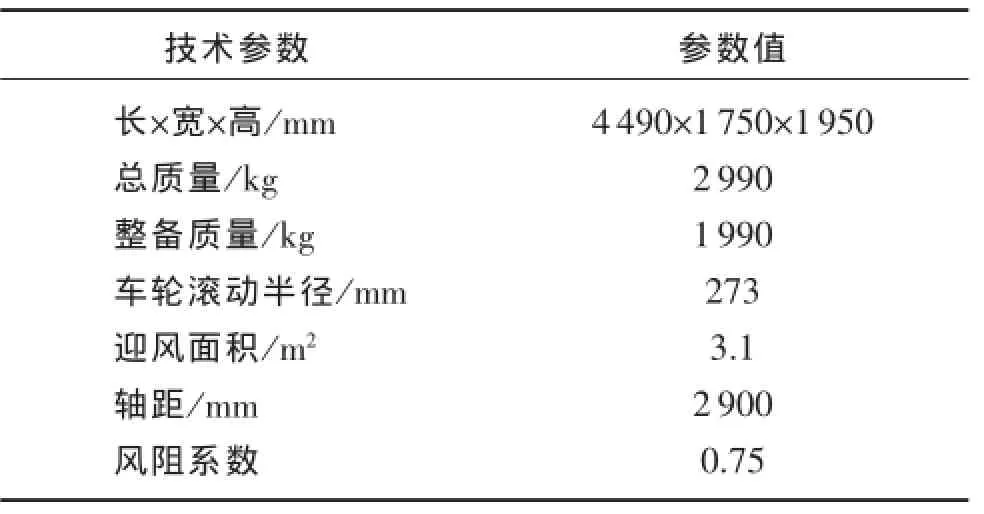
表2 純電動物流車基本參數
2
2.11功率計算
11)當汽車以某一速度vvaa行駛在一定坡度ii上時,所需功率為

式中:f——滾動摩擦力系數;m——整車質量;CD——風阻系數;A——迎風面積;va——車速;g——重力加速度;η——傳動效率;α——坡度 (角度),α=arctani。根據我國相關公路工程技術標準中對道路縱向坡度的要求,可取適量的道路坡度i進行額定功率計算Pi。
2)根據整車性能需求,滿載情況下,最高車速行駛在一定坡度時,可得電機最大功率Pj。
3)加速時間功率驗證,根據整車性能參數,0—50km/h加速時間為10s,則根據公式可以計算出電機功率為

式中:v——加速末的速度;δ——旋轉質量轉換系數。
驅動電機的最大功率要同時滿足不同工況下的需求,即Pmax≥max{Pi,Pj,Pc},因此,綜合以上各種情況的考慮,驅動電機的額定功率為30 kW,最大功率取值Pmax=60kW。
計算出電機的額定轉矩。根據步驟1)~4)初步選定電機的參數見表3。
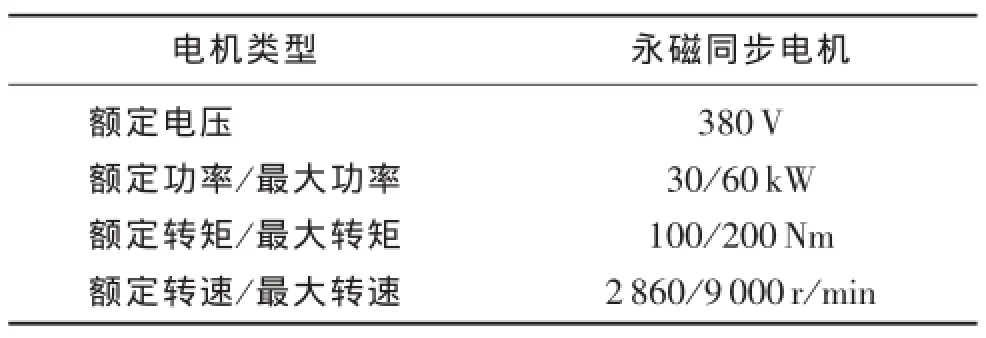
表3 電機參數
2.2電機減速傳動比的確定
1)由電機的最高轉速和最高行駛車速確定最小傳動比
式中:nmax——電機最高轉速,r/min;vmax——電動汽車最高車速,km/h;r——車輪滾動半徑。
2)最大傳動比由最大爬坡度計算
最大爬坡度為25%,帶入相關數值,取得傳動比的數值。
2.3動力電池包匹配
在此項目要求中,要求60km/h等速能夠達到里程240km。
在車速60km/h速度運行下電機消耗的功率為

總續航里程的耗電量為Ea=Pel×t。
根據電機的工作效率η1、電池的放電率η2,能量守恒得出電池包的能量E=Ea/(η1×η2),整車高壓平臺為380V,可計算出電池額定容量C=151Ah。
3 AVL-Cruise建模與仿真
3.1仿真模型的建立
Cruise軟件提供了一種圖形化的交互環境,將汽車的各個零部件模塊化,根據研究的需要添加相應的控制模塊,并正確連接數據總線[4]。整車建模過程中,將相關的模塊調用,搭建整車架構,根據整車參數對汽車的動力性、經濟性進行模擬仿真。純電動物流車整車模型結構如圖1所示。
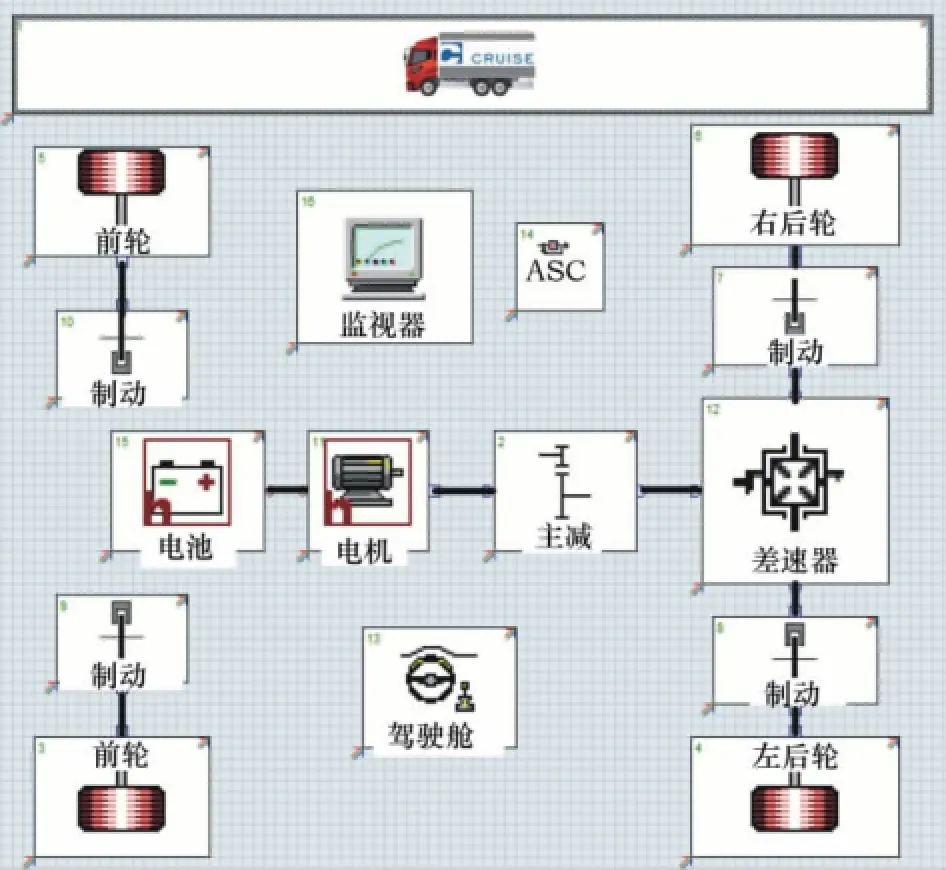
圖1 純電動商用車Cruise模型
3.2仿真結果分析
本文對研究車型進行了車輛加速性能、爬坡性能、等速續航里程、NEDC(歐洲循環工況)等進行了模擬分析,具體分析結果如下。
1)加速性能分析純電動物流車在城市道路運輸中,需要不斷地起停、加減速。因此,對整車動力性能的加減速和最高車速要求比較高。本文設計的這款城市純電動物流車型,要求0—50km/h的加速度設計目標為≤10s。通過Cruise軟件的綜合分析,整車加速性能如圖2所示,0—50km/h的加速時間為8.2s,符合最初的設計目標。
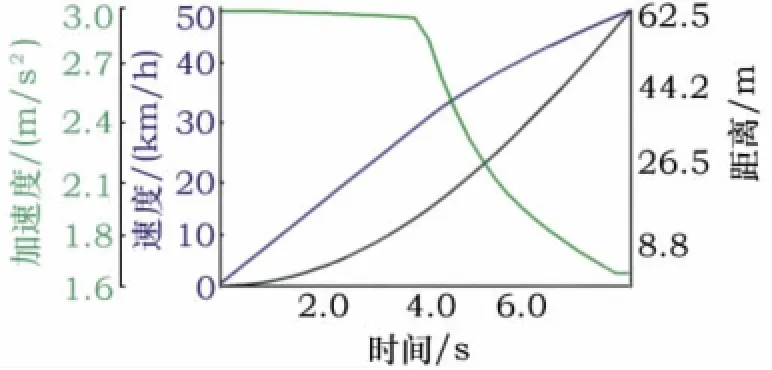
圖2 0—50km/h加速性能曲線圖
2)最高車速分析城市物流車主要負責城市內的物流運輸,對整車速度也有一定的要求,結合中國目前城市物流車型的情況,對整車的最初設計目標為滿載的情況下車輛速度≥85km/h。通過Cruise軟件的分析,如圖3所示,在整車滿載的情況下,車輛的最高速度可達91km/h,滿足本文最初的設計目標。
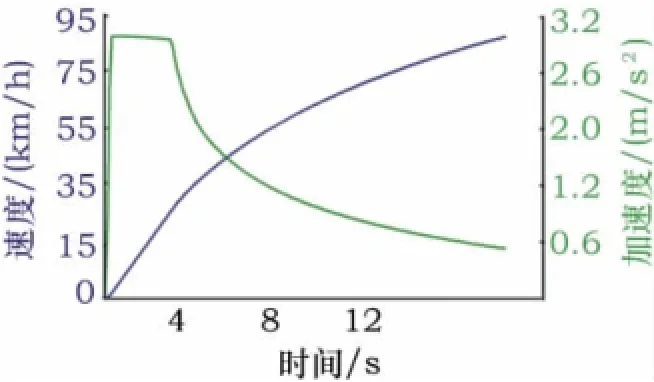
圖3 最高車速曲線圖
3)爬坡性能分析汽車的最大爬坡度作為汽車動力性能的一個重要指標[5],城市物流車對整車爬坡度性能指標也有一定的要求。本文最初的設計目標為≥25°。通過Cruise軟件的綜合分析,車速在25km/h時可達到的最大爬坡度為28°,滿足車輛的性能需求,結果如圖4所示。
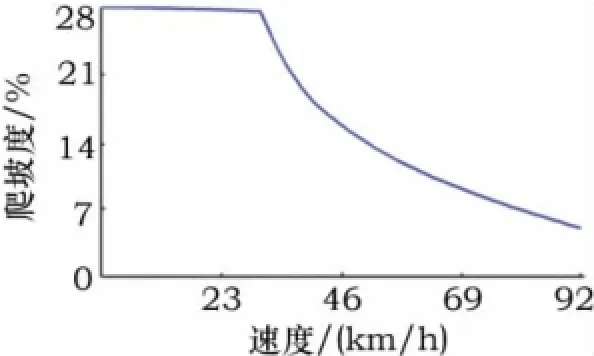
圖4 爬坡性能曲線圖
4)NEDC循環工況下整車性能分析 如圖5所示,循環工況下,整車的車速與瞬態電量消耗曲線顯示,整車的動力匹配在滿足NEDC工況的要求下,整車耗電量SOC變化比較平穩,瞬時起停對電池電量的消耗也符合初期的預定目標。低車速運行時,SOC下降比較平緩,隨著車速的增大,電機功率的加大,SOC下降比較明顯。
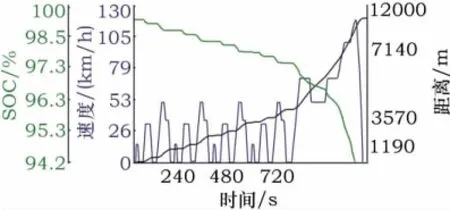
圖5 NEDC工況曲線圖
4 結論
本文針對城市運輸工況的特點開發設計一款純電動物流車,對其動力系統的關鍵參數進行設計計算,然后運用Cruise軟件進行建模和仿真分析。通過對整車的加速性能、爬坡性能、最大車速和NEDC工況的模擬分析,根據最后的仿真結果來驗證設計的合理性。仿真結果顯示,整車的動力系統滿足設計需求,能夠達到設計目標。運用Cruise軟件仿真分析,可以進一步驗證設計的可行性與準確性。
[1]楊程,杜振新.基于某款電動汽車動力系統計算與仿真分析[J].科技導刊-電子版 (上旬),2015(7):164-165.
[2]張文廣,張振東,蘭志波,等.應用CRUISE的商用車傳動系統匹配研究[J].現代制造工程,2015(12):34-112.
[3]余志生.汽車理論[M].北京:機械工業出版社,2009.
[4]劉振軍,趙海峰,秦大同.基于CRUISE的動力傳動系統建模與仿真分析[J].重慶大學學報:自然科學版,2005,28(11):8-11.
[5]牛明強,郭興眾,孫駟洲,等.基于CRUISE的純電動汽車動力系統參數匹配與仿真[J].安徽工程大學學報,2014(3):49-53.
(編輯楊景)
Power System Simulation of Pure Electric Carrier Vehicle Based on Cruise
LEI Teng1,2,XU Tong-meng1,2,LI Feng2,YANG Wan-guo2,WANG Qiang2,JIAO Ya-nan2
(1.School of Mechanical Engineering,Shandong University,Ji'nan 250000,China;2.Shandong Wuzheng Group Co.,Ltd.,Rizhao 276800,China)
In this paper,simulation is conducted for the city driving situation based on Cruise software,in which key parameters of pure-electric power system is analyzed,and verified for feasibility.
pure electric carrier vehicle;power system;simulation analysis;Cruise
U469.72
A
1003-8639(2016)09-0001-03
2016-03-21;
2016-06-12
雷騰 (1987-)男,碩士,工程師,研究方向為新能源汽車設計、整車開發工作。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
物流技術與應用(2020年11期)2020-03-11 03:11:36
汽車觀察(2018年12期)2018-12-26 01:05:44
藝術啟蒙(2018年7期)2018-08-23 09:14:18
消費導刊(2018年8期)2018-05-25 13:20:16
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
現代企業(2015年2期)2015-02-28 18:45:09
商界(2014年12期)2014-04-29 00:44:03