電力推進船舶制動電阻設(shè)計研究
2016-10-13 02:57:36冒如權(quán)
船電技術(shù) 2016年8期
冒如權(quán)
?
電力推進船舶制動電阻設(shè)計研究
冒如權(quán)
(海軍駐上海地區(qū)艦艇設(shè)計研究軍事代表室,上海 200011)
針對船舶制動過程中制動電阻的設(shè)計問題,本文建立了船槳仿真模型,對船舶制動過程中的能量回饋進行了仿真,提出了制動電阻設(shè)計方法,并通過仿真驗證了所提方法的有效性。
電力推進 螺旋槳 制動過程 制動電阻
0 引言
船舶電力推進是目前船舶推進方式的一種,其主要特點是采用推進電動機驅(qū)動螺旋槳負(fù)載,推進電動機的運行工況隨著船舶航速要求的變化而變化。在船舶制動運行工況下,推進電動機處于再生制動狀態(tài),電動機轉(zhuǎn)子、螺旋槳等旋轉(zhuǎn)部件所存儲的機械能可通過電動機轉(zhuǎn)換成電能回饋到變頻器直流側(cè)電容中時,使直流母線電壓上升。若這部分回饋能量不及時釋放就會引起變頻器過壓保護動作或造成主回路大功率器件的過壓損壞。船舶的制動不僅關(guān)系到變頻器裝置的安全運行,而且直接影響船舶的安全運行和船員的人身安全[1]。對于采用二極管不控整流的變頻器而言,需要能耗制動電阻對回饋的能量進行快速處理,以消除回饋能量對船舶電力系統(tǒng)的影響,實現(xiàn)船舶快速的機動性能。制動電阻的設(shè)計和選擇對于變頻器和船舶安全運行至關(guān)重要。
文獻[2]對船舶電力推進系統(tǒng)的制動過程機理進行了分析,但未說明制動電阻的選擇原則。文獻[3]推導(dǎo)了制動電阻的取值范圍,但未考慮螺旋槳的水動力特性對制動過程的影響,所得結(jié)論只適用于全回轉(zhuǎn)螺旋槳的應(yīng)用場合。
本文建立了基于matlab/simulink 的船舶電力推進系統(tǒng)螺旋槳能量回饋仿真系統(tǒng)模型,對制動過程的能量回饋進行準(zhǔn)確的仿真和分析,并在此分析的基礎(chǔ)上提出了制動電阻設(shè)計選擇原則。以某實船參數(shù)為例,對制動能量和制動電阻進行了仿真驗證。
1 船舶制動能量回饋分析
在船舶制動過程中,船舶是在船舶阻力和螺旋槳的推力作用逐漸減速的。由推進電機和螺旋槳的工作特性可知,推進系統(tǒng)進入制動狀態(tài)后,在電機轉(zhuǎn)速降為零之前,推進電機將向變頻器饋能,饋能大小與船舶工作的螺旋槳特性有關(guān)。因此對需要螺旋槳的水動力特性和船舶的阻力特性進行研究。
1.1船-槳數(shù)學(xué)模型
船槳數(shù)學(xué)模型主要包括螺旋槳進速比模型、推力和轉(zhuǎn)矩計算模型、船舶阻力模型以及船速模型。船槳模型框圖如圖1所示。
進速比表達式如下:
式中,h為進程;v為前進速度,即螺旋槳在水中實際前進的速度,單位為m/s;為螺旋槳轉(zhuǎn)速,單位為r/s;為螺旋槳直徑,單位為m。
在螺旋槳動態(tài)過程中, v與的變化并不同步,的取值范圍為,對仿真來說很不方便和實用。為滿足螺旋槳動態(tài)仿真要求,需對螺旋槳敞水特性進行改進,采用四象限螺旋槳特性的形式來表達[4]。在和v不同時為零時,改進的進速比J相應(yīng)的定義如下:
1.1.2推力和轉(zhuǎn)矩計算模型
由參考文獻[5]可知,推力和轉(zhuǎn)矩與槳直徑、轉(zhuǎn)速、進速v、海水密度有關(guān)。螺旋槳的推力和轉(zhuǎn)矩方程如下式所示:
式中,為螺旋槳的推力,單位為N;為螺旋槳的轉(zhuǎn)矩,單位為N·m;為海水的密度,單位為kg/m3,通常取1025 kg/m3。K、 K分別為改進后的螺旋槳推力系數(shù)和轉(zhuǎn)矩系數(shù)。
在螺距比H/D給定的情況下,K與K均是進速比J的函數(shù),可表示為下面的函數(shù)關(guān)系:
本文選用諾爾特斯特洛姆系列試驗圖譜,該系列槳的推力系數(shù)和轉(zhuǎn)矩系數(shù)特性曲線可通過切比雪夫多項式擬合得到[5]。
如果螺旋槳參數(shù)和諾爾特斯特洛姆試驗值不同,即船舶螺旋槳的盤面比/A≠0.45,槳葉數(shù)≠4,可按以下公式進行修正。
本文的研究對象確定為TF boys這一偶像團體的粉絲群體。TF boys是目前首屈一指國內(nèi)偶像團體,他們在團體的高熱度和廣泛的關(guān)注度以及粉絲的強大力量方面有著其他組合不可比擬的優(yōu)勢,且其粉絲群體內(nèi)部的屬性構(gòu)成完善,因此,TF boys的粉絲社群無疑本研究最合適的研究對象。
換算系數(shù)表達式如下:
式中0為圖譜螺旋槳槳葉數(shù)4,(/A)0為圖譜螺旋槳盤面比0.45,為待算螺旋槳槳葉數(shù),/A為待算螺旋槳盤面比。
1.1.3伴流系數(shù)計算模型
伴流的存在使得船后螺旋槳附近流場中水流對槳的相對速度和船速不同,從而使螺旋槳產(chǎn)生的推力與敞水槳產(chǎn)生的也不同。伴流系數(shù)表達式如式(9)所示:
由于槳的負(fù)荷是變化的,伴流系數(shù)的計算方法如下[6]:
1.1.4推力減額系數(shù)計算模型
推力減額系數(shù)的大小與船型、螺旋槳尺度、螺旋槳負(fù)荷以及螺旋槳與船體間的相對位置等因素有關(guān),通常都是根據(jù)船模自航試驗或經(jīng)驗公式來決定的。
由于槳的負(fù)荷是變化的,推力減額系數(shù)t的計算方法如下:
式中:t為正航時的推力減額系數(shù),t為到航時的推力減額系數(shù);n為螺旋槳額定轉(zhuǎn)速,單位為r/s。
1.1.5船舶阻力模型
船舶阻力的大小與船型、船體表面粗糙度等因素有關(guān)。用理論方法來計算船舶阻力是很困難的,通常都是根據(jù)船模自航試驗或經(jīng)驗公式來決定的。船舶所受總阻力的數(shù)學(xué)模型可簡化為:
式中:C為船舶摩擦阻力系數(shù),k為船型修正系數(shù),?C為船體粗糙度補貼數(shù),C為剩余阻力系數(shù),為濕表面積。
1.1.6航速模型
電力推進船舶中的推進電動機、螺旋槳和船體構(gòu)成了船-機-槳系統(tǒng)。船-機-槳系統(tǒng)的運動是有船舶運動和推進系統(tǒng)運動綜合而成的,其動力學(xué)方程為:
其中,為考慮了推進電機、螺旋槳等回轉(zhuǎn)部件的轉(zhuǎn)動慣量;M為推進電動機的驅(qū)動力矩;M為螺旋槳水阻力矩;為船體質(zhì)量,單位為kg;為隨船一起運動的附著水質(zhì)量,單位為kg。一般按照經(jīng)驗取附著水質(zhì)量為船體質(zhì)量的5%~15%。
1.2船-槳仿真模型
根據(jù)上節(jié)的船-槳數(shù)學(xué)模型,可利用matlab仿真軟件建立仿真模型。輸入為螺旋槳轉(zhuǎn)速,輸出為螺旋槳推力和轉(zhuǎn)矩以及船速。
船舶制動能量回饋過程的仿真模型如圖2所示:

圖2 船舶制動能量回饋過程仿真模型
1.3船舶制動電阻設(shè)計
制動電阻阻值是船舶制動回路中的重要參數(shù)。電阻越大,電流越小,制動力矩就越小,制動力矩太小時就起不到制動的效果,會造成變頻器母線電壓上升。反之,如果一味地減小制動電阻阻值,不僅會造成浪費,而且流過制動元器件的電流就會太大而導(dǎo)致變頻器燒毀,所以制動電阻阻值的選型是設(shè)計船舶電力推進系統(tǒng)的一個重要內(nèi)容。
制動電阻計算步驟如下:
a) 確定制動單元能力,列出相關(guān)參數(shù)
包含:制動單元動作電壓U、制動單元過壓閾值U、制動單元功率模塊最大允許電流值I、制動單元峰值功率、制動單元平均功率、制動單元工作周期。一般情況下,變頻器制動單元載流能力與變頻器逆變單元是匹配的。
b) 根據(jù)船舶工作周期,確定制動電阻工作周期,一般為30 s/90 s。
c) 根據(jù)計算或仿真的制動功率和制動能量,確定船舶工作周期的制動峰值功率P。
d) 確定制動電阻阻值和功率
根據(jù)U、P,計算制動電阻最大阻值R=U2/P。根據(jù)U、I,計算制動電阻最小阻值R。制動電阻R取值可在(R,R)之間取值。
制動電阻的額定功率應(yīng)大于P。
2 船舶制動過程仿真
通過對船舶制動能量回饋過程中的分析可知,在停車和倒車等制動過程中,存在船帶槳的水動力狀態(tài),此時船槳所存儲的機械能經(jīng)推進電機轉(zhuǎn)換為電能。
仿真參數(shù)如下:船舶質(zhì)量為6000噸,總長112.1 m,水線長107.4 m,兩柱間長104.1 m,型寬17.5 m,型深7.6 m,首吃水4.5 m,尾吃水4.5 m,濕表面積3032 m2,排水體積6914.7 m3,方形系數(shù)0.8435,長寬比5.949,寬度吃水比3.889,采用雙機雙槳,推進電機最大功率810 kW/臺,螺旋槳額定轉(zhuǎn)速155轉(zhuǎn),最大轉(zhuǎn)速189.9 rpm,巡航速度13節(jié),螺旋槳直徑D=2.76 m,螺距H/D=1.2,盤面比A/Ad=0.5,槳葉數(shù)為4。
2.1 船舶制動過程仿真
船舶在停車和倒車時都存在制動過程,而只有在制動過程中螺旋槳轉(zhuǎn)速與轉(zhuǎn)矩方向相反時,才會有能量回饋到變頻調(diào)速系統(tǒng)。本文以倒車的制動過程為例說明。
在額定航速情況下,推進電機工作在150 r/min,通過變頻器控制,在48 s內(nèi)把推進電機從150 r/min調(diào)整至-90 r/min,由于螺旋槳與推進電機的轉(zhuǎn)子直接相連(機槳同軸),則螺旋槳也會在48 s內(nèi)從150 r/min到-90 r/min,因為轉(zhuǎn)速為斜坡下降,螺旋槳轉(zhuǎn)速從150 r/min到0的時間為30 s,即制動時間為30 s,仿真時間設(shè)為2000 s。仿真結(jié)果如所示:
由圖3~圖8可知,A-B時間段螺旋槳轉(zhuǎn)矩和轉(zhuǎn)速方向相同,螺旋槳還是起著推進器的作用,推進電動機輸出正功率。B-C-D時間段螺旋槳出現(xiàn)負(fù)轉(zhuǎn)矩,螺旋槳轉(zhuǎn)速與轉(zhuǎn)矩方向相反,此時螺旋槳不再起推進作用,而是作為水輪機運轉(zhuǎn),此時推進電動機向器反饋能量。從D時刻起,螺旋槳開始反轉(zhuǎn),此時航速繼續(xù)減小到0直至反向行駛。圖6所示為推進電機的輸出功率,由圖可知,在橫軸坐標(biāo)下即為制動回饋功率的曲線,最大制動功率為91.8 kW,實際制動時間為17 s。
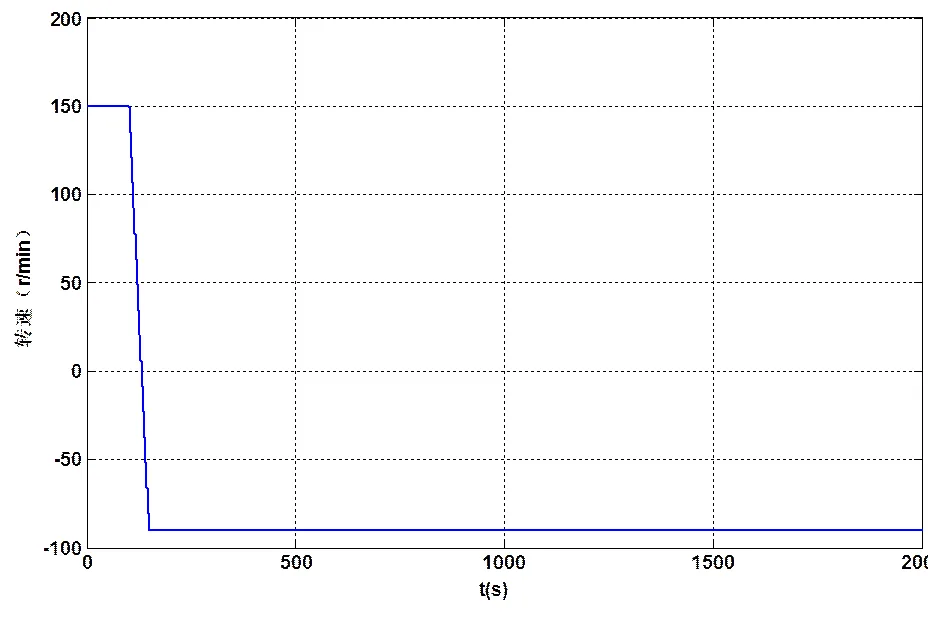
圖3 螺旋槳轉(zhuǎn)速曲線

圖4 航速曲線
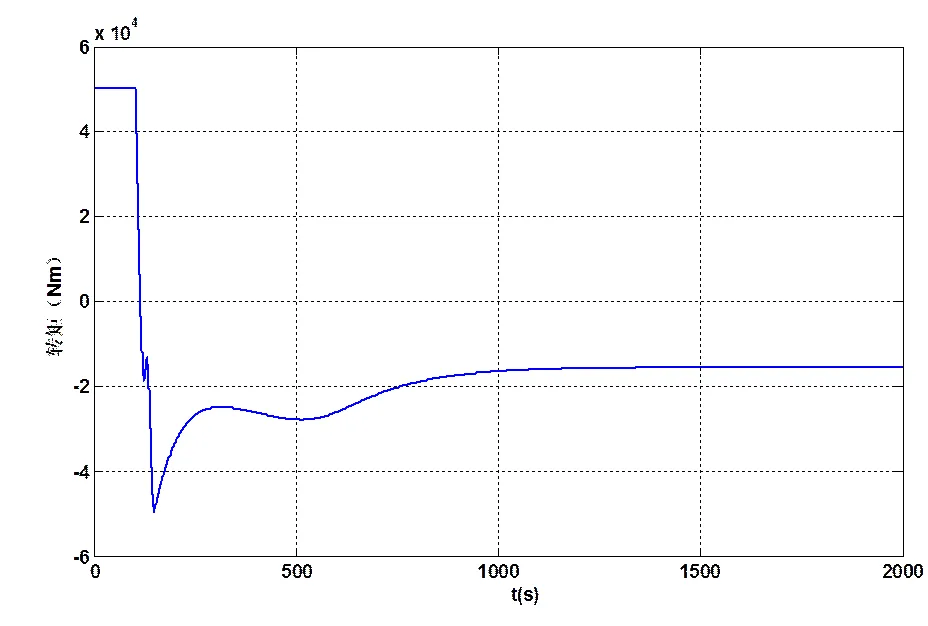
圖5 轉(zhuǎn)矩曲線
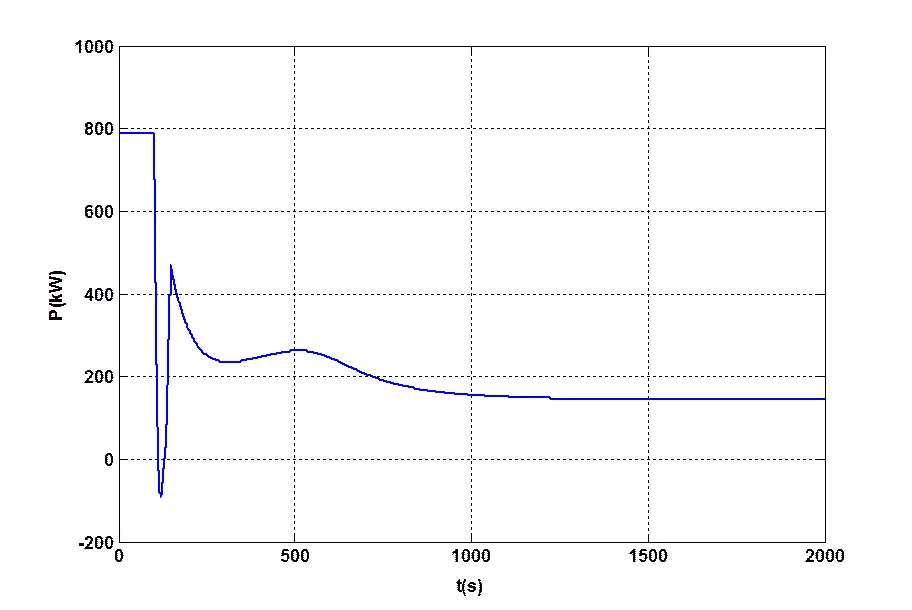
圖6 推進功率曲線
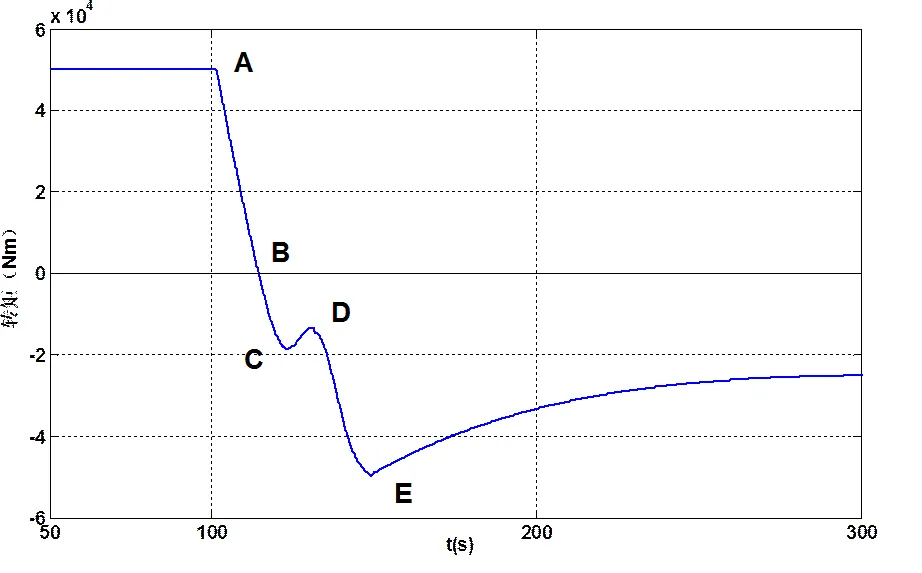
圖7 倒車過程中轉(zhuǎn)矩曲線
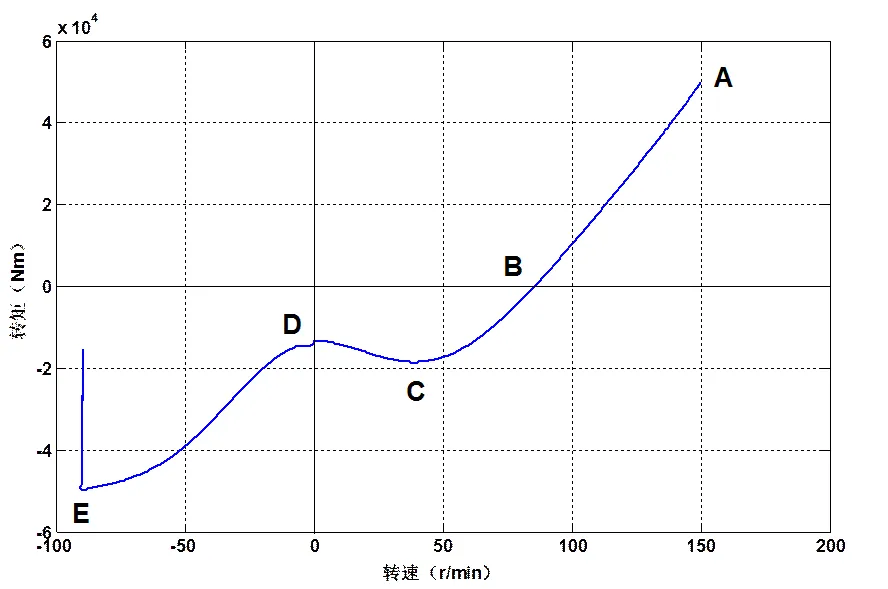
圖8 轉(zhuǎn)速-轉(zhuǎn)矩關(guān)系曲線
2.2船舶制動電阻仿真
由上節(jié)可知,在已知最大制動功率的情況下,可按照1.3節(jié)的制動電阻設(shè)計方法計算制動電阻值。取U=1000 V,U=1100 V,I=810 A,可得R=10.89 Ω,R=1.36 Ω,取制動電阻值R=8.3 Ω,制動電阻功率為120 kW(30 s/90 s)。
圖9~圖11為制動電阻R分別取不同值時,直流母線電壓和制動單元開關(guān)管電流的仿真波形。由圖10可知,當(dāng)制動電阻取值過大時,制動功率不足,直流母線電壓超過過壓閾值,會導(dǎo)致變頻器保護。由圖11可知,當(dāng)制動電阻取值過小時,制動單元開關(guān)管電流超過額定電流值,會導(dǎo)致制動單元燒毀。
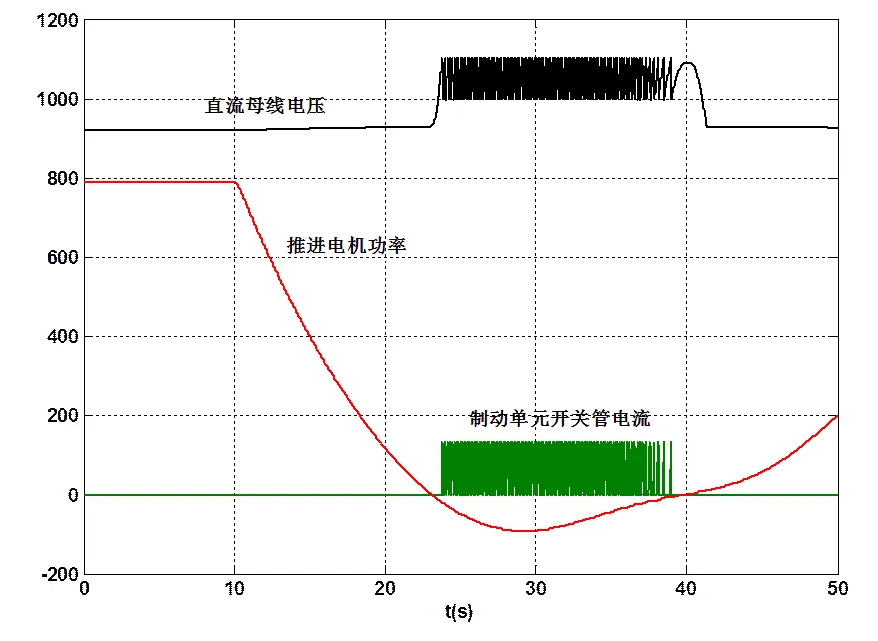
圖9 制動過程中制動單元電壓電流曲線(Rc =8.3Ω)

圖10 制動過程中制動單元電壓電流曲線(Rc =16Ω)
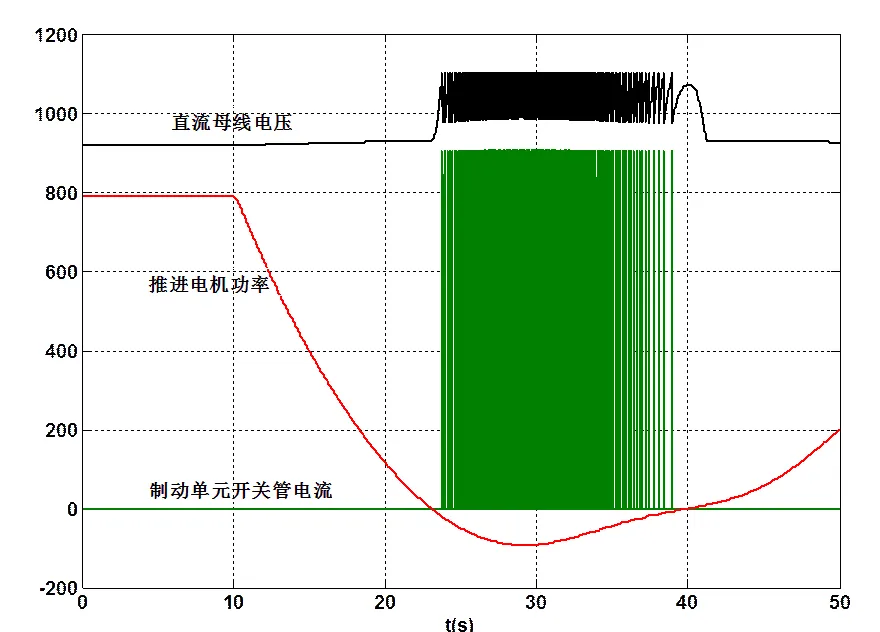
圖11 制動過程中制動單元電壓電流曲線(Rc =1.2Ω)
3 結(jié)論
通過對船槳模型的分析,建立船槳及電力推進系統(tǒng)的仿真模型,對制動過程的能量回饋進行準(zhǔn)確的仿真。在船舶制動過程中,采用變頻器控制推進電機轉(zhuǎn)速下降過程中,螺旋槳回饋能量時間小于制動時間。
對制動電阻選取進行仿真對比分析,按照最大制動功率設(shè)計的制動電阻,可很好地實現(xiàn)制動能量的回饋耗能,直流母線電壓穩(wěn)定在設(shè)定范圍內(nèi),且制動單元開關(guān)管電流也小于額定電流。
參考文獻:
[1] 任洪瑩. 船舶電力推進永磁同步電動機制動過程的研究[D]: [碩士學(xué)位論文]. 大連: 大連海事大學(xué),2009.6.
[2] 喬鳴忠,張曉鋒,朱鵬,蔡巍. 變頻器供電的船舶推進系統(tǒng)制動過程研究[J]. 武漢理工大學(xué)學(xué)報,2009,33(5).
[3] 任洪瑩, 馮惠, 任俊杰, 賴和里. 船舶電力推進電動機能耗制動電阻值研究[J]. 航海技術(shù), 2010, 4.
[4] 李殿璞. 基于螺旋槳特性四象限Chebyshev擬合式的深潛艇正倒航變速推進模型[J]. 哈爾濱工程大學(xué)學(xué)報, 2002, 23(1): 52-57.
[5] 高海波.船舶電力推進系統(tǒng)的建模與仿真[D]: [博士學(xué)位論文]. 武漢: 武漢理工大學(xué), 2008.11.
[6] 魯謙, 李連有, 李來成. 船舶原理手冊[M]. 北京: 國防工業(yè)出版社,1988.
Design of Brake Resistance for Electric Propulsion Ship
Mao Ruquan
( Representatives Office of Naval Warship Design & Research , Shanghai 200011, China;)
TP274
A
1003-4862(2016)08-0036-05
2016-06-12
冒如權(quán)(1979-),男,工程師。研究方向:艦船電氣專業(yè)設(shè)計質(zhì)量監(jiān)督。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
防爆電機(2020年3期)2020-11-06 09:07:42
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
測控技術(shù)(2018年5期)2018-12-09 09:04:50
電子制作(2017年7期)2017-06-05 09:36:13
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19