具有數據丟失二維Roesser系統的量化狀態反饋控制
2016-10-13 12:41:39卜旭輝程子豪余發山楊俊起
電機與控制學報 2016年3期
卜旭輝, 程子豪, 余發山, 楊俊起
(河南理工大學電氣工程與自動化學院,河南焦作454000)
具有數據丟失二維Roesser系統的量化狀態反饋控制
卜旭輝, 程子豪, 余發山, 楊俊起
(河南理工大學電氣工程與自動化學院,河南焦作454000)
探討存在數據丟失二維Roesser系統的量化狀態反饋控制器設計問題。假設二維系統在網絡控制系統中運行且系統狀態全部可測,測量到的狀態數據量化后經網絡進行傳輸,同時由于網絡自身限制伴隨數據包丟失現象的發生。首先將數據丟失描述成取值為0或1的隨機伯努利序列,定義了隨機意義下二維系統的均方穩定性。其次,采用扇形界方法處理數據量化造成的誤差,給出一個閉環系統均方漸進穩定的充分條件,基于該條件可通過求解線性矩陣不等式設計狀態反饋控制器。最后,仿真示例驗證了所提設計方法的有效性。
二維系統;網絡控制系統;量化控制;數據丟失;隨機系統
0 引言
二維系統理論在多維數字濾波、圖像處理、信號處理、過程控制以及迭代學習控制中有著廣泛的應用,目前已經成為控制領域研究的熱點[1-4]。二維系統的穩定性分析與鎮定、H∞控制、自適應控制、最優保成本控制以及滑模控制等方面已經有較多文獻發表,詳見文獻[5-9]。另一方面,網絡控制系統目前在實際中廣泛應用,相比與傳統的點對點控制模式,網絡控制系統具有低成本、安裝簡便、維護方便以及可靠性高等優點。但網絡通信機制的引入,使得控制系統產生一些不確定性的因素,如網絡傳輸誘導延時、數據包丟失等。網絡控制系統的研究目前也有大量的文獻發表,見文獻[10-15],但大多是針對一維被控對象給出的。網絡約束條件下二維系統的分析和設計目前僅有少量文獻發表,見文獻[16-17],且主要研究數據包丟失的影響。文獻[16]研究了二維Fornasini-Marchesini系統存在測量數據丟失時的魯棒H∞濾波問題,文獻[17]研究了二維Roesser系統存在數據丟失時的H∞控制器設計問題。然而,文獻[16-17]針對網絡二維系統的研究均假設數據在傳輸過程中精度是無限大的,未考慮數據量化的影響。
實際網絡控制系統中,由于傳輸信道容量以及傳感或執行設備的精確度限制,系統數據在傳輸前首先被量化處理。因此,數據量化是影響網絡系統控制性能的一個重要因素。實事上,針對非網絡控制模式下一維系統的量化控制問題已經被廣泛研究。文獻[18]研究了線性系統輸出數據量化的穩定性問題,文獻[19]研究了線性、非線性系統控制輸入數據量化的穩定性問題。文獻[20]提出了一種處理量化誤差的扇形界方法,并基于該方法研究了線性系統的輸出量化、輸入量化以及狀態量化問題。針對網絡模式下的一維系統,文獻[21]研究了系統存在狀態和輸入量化的保成本控制,文獻[22]研究了線性時變系統的H∞量化反饋控制,文獻[23]研究了線性系統的輸出反饋控制。然而,上述結果均是針對一維系統給出的,基于量化數據的二維系統分析和設計目前尚無研究。
本文針對存在數據丟失的二維系統,考慮基于狀態量化的反饋控制器設計方法。首先將數據丟失描述成取值為0或1的隨機伯努利序列,定義了隨機意義下二維系統的均方穩定性。其次,采用扇形界方法處理量化數據的影響,給出一個閉環系統均方漸進穩定的充分條件,基于該條件設計了狀態反饋控制器。最后,仿真結果驗證了設計方法的有效性。
1 問題描述
考慮如下二維Roesser系統

式中xh(i,j)∈Rn1,xv(i,j)∈Rn2,u(i,j)∈Rm分別表示水平狀態分量、垂直狀態分量以及控制輸入量,A,B為系統矩陣。
假設1系統(1)的邊界條件滿足

假設系統的測量信號在通過網絡傳輸前首先進行量化處理,并采用如下邏輯量化器[24]:
式中ρ為量化密度[24],其量化函數q(·)定義為
考慮如下狀態反饋控制器

當上述控制策略通過網絡控制模式實現時,狀態測量的量化信號q(x(i,j)通過網絡在控制器和被控對象間傳輸。由于網絡條件的約束,使得q(x(i,j)經常產生數據包的丟失。此時,控制器(4)可被描述為

式中{αi,j}為取值0和1的隨機伯努利序列,且滿足

式中0≤α≤1為已知常數。
注1由于隨機變量{αi,j}的引入,使得上述二維閉環系統為一個隨機系統。因此,已有確定性二維系統的分析和控制器設計方法在這里無法適用。為了進行的控制器設計,我們首先給出如下二維系統的隨機穩定性定義。
定義1若二維系統(1)對于零輸入條件和假設1中的有界邊界條件滿足

則系統均方漸進穩定。
至此,研究內容可描述為:對于滿足假設1邊界條件的二維系統(1),如何設計量化狀態反饋控制器(4),使得系統存在數據丟失的情況下閉環二維系統均方漸進穩定。
2 主要結果
為了分析二維隨機系統的穩定性,我們采用扇形界方法處理量化誤差[20],即對于給定的量化密度ρ滿足

此時狀態反饋控制器(4)可重寫為

由式(1)和式(6)可得如下閉環系統表達式
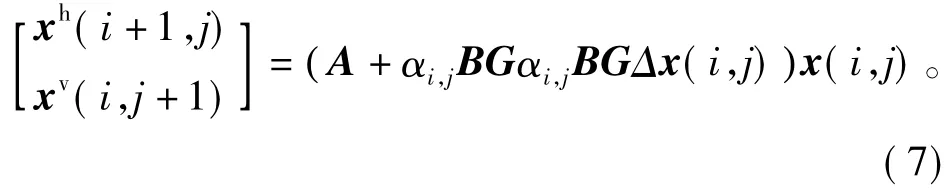
代入二維閉環系統(7)中可得
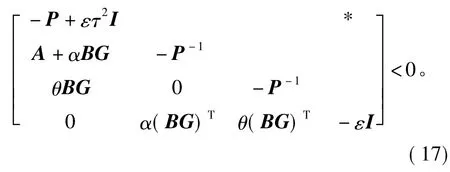
定理1若二維系統滿足假設1的邊界條件,當存在正定矩陣P=diag{Ph,Pv}>0滿足如下條件時

二維閉環系統(8)均方漸進穩定,式中θ2=α(1-α)。
證明定義
考慮如下指標
將式(8)帶入上述指標可得
式中
根據(9)式可知Ψ<0,因此,對于所有x≠0可得
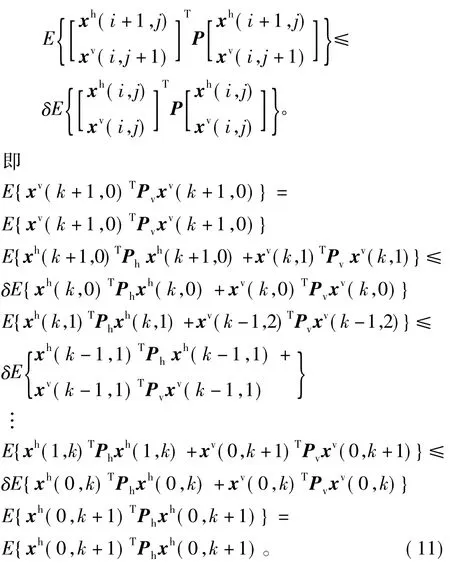
式(11)兩端相加得
由上述關系可得
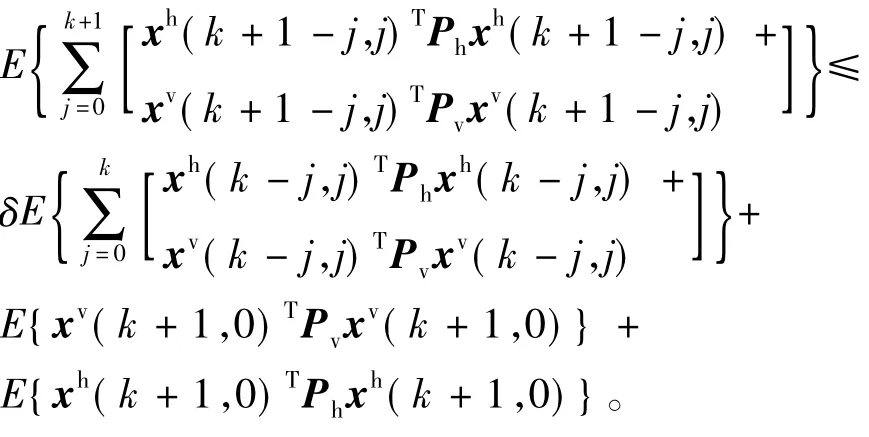
上式意味著
上式兩端相加可得
注2定理1給出了二維閉環系統均方漸進穩定的一個充分條件。當系統不存在數據丟失時,即α=1和θ=0,條件(9)變為

特殊的,當系統狀態不存在量化誤差時,即Δx(i,j)= 0,上述條件變為

該條件為二維確定系統狀態反饋控制的結果,參見文獻[2]。因此,定理1的結果更具有一般意義。
定理1是在控制器G已知的情況下給出的,論文的設計目標為基于系統矩陣A,B和參數α設計G。在給出設計結果前,我們首先給出如下引理。
引理1假設X,Y為一定維數的矩陣或向量,對于任意標量ε>0和所有滿足ΔΔT≤I的矩陣Δ,如下不等式成立

根據上述引理,我們可以給出如下結果。
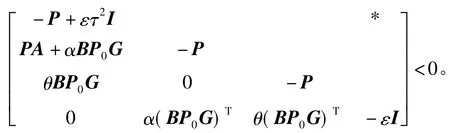
定理2對于二維閉環系統(8),若存在矩陣Y,P0,正定矩陣P和標量ε>0滿足
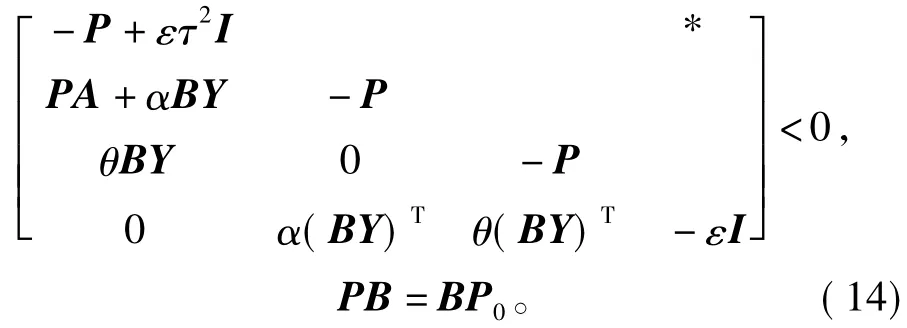
則二維閉環系統(8)均方漸進穩定。此時,狀態反饋控制器(4)的增益矩陣可設計為G=P0-1Y。
證明定理1的條件可寫為

式中

根據Schur補引理,條件(15)轉化為如下不等式
上述不等式可進一步寫為
式中

根據引理1和式(16)可知
對不等式(17)分別左乘和右乘diag(I,P,P,I),并記PB=BP0,可得
記Y=P0G可知定理2成立。
注3定理2給出了一個二維閉環系統均方漸進穩定的線性矩陣不等式條件,該條件可以通過Matlab的LMI具箱給出一個可行解,同時給出了一個滿足要求的狀態反饋增益矩陣。
3 仿真示例
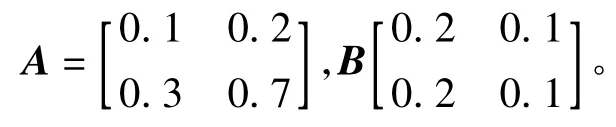
考慮如下參數的二維系統式(1):
假設α=0.8,即數據經過網絡傳輸的丟失率為20%。量化器(2)中的參數選擇為u0=0.1,ρ=0.9,經計算可知該選擇使得量化等級覆蓋了系統狀態變量的所有取值。根據定理2,將上式參數代入不等式(14)中,通過Matlab的LMI工具箱求解出如下結果
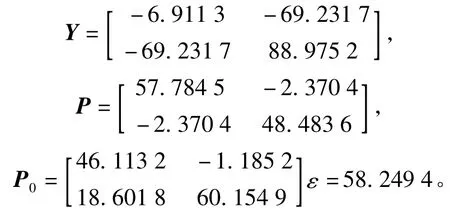
因此,反饋增益可選擇為

為了驗證設計的有效性,我們通過Matlab軟件進行數值仿真。假設系統初始條件為
仿真結果如圖1和圖2所示。圖1給出了xh(i,j)的狀態響應軌跡,圖2給出了xv(i,j)的狀態響應軌跡,仿真結果表明二維系統是穩定的。因此,所提方法針對量化誤差和數據丟失的二維狀態反饋控制器設計是有效的。
4 結論
本文給出了一種存在數據丟失時的二維系統量化狀態反饋控制器設計方法。定義了二維隨機系統的均方穩定性,基于線性矩陣不等式給出了一個閉環系統穩定的充分條件,并基于該條件設計了控制器,數值仿真結果驗證了設計方法的有效性。本文是在隨機系統定義下進行二維系統狀態控制器設計的,在此框架下也可以進行其他隨機因素的二維系統分析和設計。
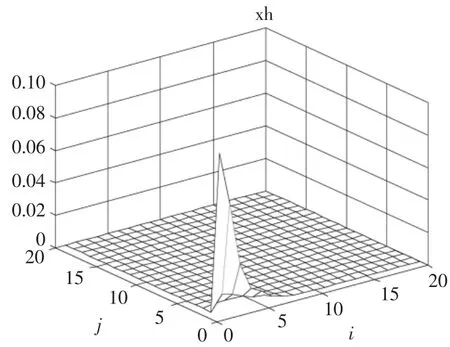
圖1 狀態響應xh(i,j)Fig.1 State response of xh(i,j)
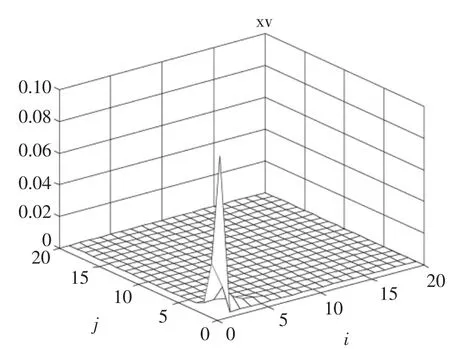
圖2 狀態響應xv(i,j)Fig.2 State response of xv(i,j)
[1]KACZOREK T.Two-dimensional linear systems[M].Berlin:Springer-Verlag,1985:1-43.
[2]DU Chunling,XIE Lihua.H∞control and filtering of two-dimensional systems[M].Berlin:Springer,2002:100-114.
[3]BORS D,WALCAZK S.Application of 2-D systems to investigation of a process of gas filtration[J].Multidimens.Syst.Signal Process,2012,23(1-2):119-130.
[4]SINGH V.Stability analysis of 2-D discrete systems described by the Fornasini-Marchesini second model with state saturation[J]. IEEE Transactions on Circuits and Systems II:Express Briefs,2008,55(8):793-796.
[5]DU Chunling,XIE Lihua,ZHANG Cishen.H∞control and robust stabilization of two-dimensional systems in Roesser models [J].Automatica,2001,37(2):205-211.
[6]GUAN Xinping,LONG Chengnian,DUAN Guangren.Robust optimal guaranteed cost control for 2-D discrete systems[J].IEE Proceedings on Control Theory and Applications,2001,148(5):355-361.
[7]吳敏,陳詩桓,佘錦華,等.基于二維混合模型的改進型重復控制系統保性能設計方法[J].自動化學報,2009,35(1):54 -64 WU Ming,CHEN Shihuan,SHE Jinhua,et al.Guaranteed cost design of modified repetitive control systems based on 2-D hybrid model[J].Acta Automatica Sinica,2009,35(1):54-64.
[8]WU Ligang,GAO Huijun.Sliding mode control of two-dimensional systems in roesser model[J].IET Control Theory&Applications,2008,2(4):352-364.
[9]CUI Jiarui,HU Guangda.State estimation of 2-D stochastic systems represented by FM-II model[J].Acta Automatica Sinica,2010,36(5):755-761.
[10]HESPANHA J P,NAGHSHTABRIZI P,XU Yonggang.A survey of recent results in networked control systems[J].Proceedings of the IEEE,2007,95(1):138-162.
[11]ZHANG Wei,BRANICKY M S,PHILLIPS S M.Stability of networked control systems[J].IEEE Control Systems magazine,2001,21(1):85-99.
[12]黨向東,張慶靈.時變時延網絡控制系統穩定性分析[J].電機與控制學報,2009,13(4):592-602. DANG Xiangdong,ZHANG Qingling.Stability analysis of NCS with time-varying delay[J].2009,13(4):592-602.
[13]WANG Zidong,YANG Fuwen,HO D W C,et al.Robust H∞control for networked systems with random packet losses[J]. IEEE Trans.Systems,Man and Cybernetics-Part B,2007,37 (4):916-924.
[14]王常虹,奚伯齊,李清華,等.網絡化控制系統魯棒L2-L∞控制器設計[J].電機與控制學報,2010,14(2):25-30. WANG Changhong,XI Boqi,LI Qinghua,et al.Robust L2-L∞controller design for networked control systems[J].Electric Machines and Control,2010,14(2):25-30.
[15]游科友,謝立華.網絡控制系統的最新研究綜述[J].自動化學報,2013,39(2):101-118. YOU Keyou,XIE Lihua.Survey of recent progress in networked control systems[J].Acta Automatica Sinica,2013,39(2):101-118.
[16]LIU Xiuming,GAO Huijun,SHI Peng,et al.Robust H∞filtering for 2-D systems with intermittent measurements[J].Circuits.Systems&Signal Processing.2009,28(2):283-303.
[17]BU Xuhui,WANG Hongqi,ZHENG Zheng,et al.H∞control for network-based 2-D systems with missing measurements[J]. Abstract and Applied Analysis,2014,2014(5):1-11.
[18]BROCKETT R W,LIBERZON D.Quantized feedback stabilization of linear systems[J].IEEE Transactions on Automatic Control,2000,45(7):1279-1289.
[19]LIBERZON D.Hybrid feedback stabilization of systems with quantized signals[J].Automatica,2003,39(9):1543 -1554.
[20]Fu Minyue,XIE Lihua.The sector bound approach to quantized feedback control[J].IEEE Transactions on Automatic Control,2005,50(11):1698-1710.
[21]YUE Dong,PENG Chen,TANG Gongyou.Guaranteed cost control of linear systems over networks with state and input quantizations[J].IEE Proceedings:Control Theory and Applications,2006,153(6):658-664
[22]PENG Chen,TIAN Yuchu.Networked H∞control of linear systems with state quantization[J].Information Sciences,2007,177(24):5763-5774.
[23]TIAN Engang,YUE Dong,PENG Chen.Quantized output feedback control for networked control systems[J].Information Sciences,2008,178(12):2734-2749.
[24]ELIA N,MITTER K.Stabilization of linear systems with limited information[J].IEEE Transactions on Automatic Control,2001,46(9):1384-1400.
(編輯:賈志超)
Quantized state feedback control for 2-D Roesser systems with packet dropouts
BU Xu-hui, CHENG Zi-hao, YU Fa-shan, YANG Jun-qi
(School of Electrical Engineering&Automation,Henan Polytechnic University,Jiaozuo 454000,China)
The problem of quantized state feedback control was investigated for 2-D Roesser systems with packet dropouts.It is assumed that the 2-D system is implemented via a networked control system and the states of the controlled system are available.The measurements of state signal are quantized by logarithmic quantizer before being communicated.Moreover,the measurements missing often occur due to the communication channel failure.Firstly,the data missing phenomena was modeled by a Bernoulli distributed stochastic variable taking values of 1 and 0,and the stochastic stability for the 2-D system is defined. Then,a sufficient condition was derived in virtue of the method of sector-bounded uncertainties,which guarantees that the closed-loop system was stochastically stable.Based on the condition,quantized state feedback controller was designed by using linear matrix inequalities technique.Finally,the simulation example was given to illustrate the proposed method.
2-Dsystems;networkedcontrolsystems;quantizedcontrol;missingmeasurements;stochastic system
10.15938/j.emc.2016.03.015
TP 273
A
1007-449X(2016)03-0096-06
2014-11-27
國家自然科學基金(61203065,61573129);河南省高等學校青年骨干教師資助計劃項目(2014GGJS-041);河南省高等學校基本科研業務費基金項目
卜旭輝(1981—),男,博士,副教授,研究方向為迭代學習控制、網絡控制以及智能交通;
程子豪(1990—),男,碩士研究生,研究方向為二維系統控制、網絡控制;
余發山(1952—),男,教授,博士生導師,研究方向為工業過程控制、電力電子傳動;
楊俊起(1979—),男,博士,副教授,研究方向為故障診斷、狀態估計理論。
卜旭輝
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
