一種水下載體干擾磁場的空間差分補償方法
2016-10-13 12:41:34趙塔陳雨薇周志堅程德福
電機與控制學報 2016年3期
趙塔, 陳雨薇, 周志堅, 程德福
(吉林大學儀器科學與電氣工程學院,吉林長春130026)
一種水下載體干擾磁場的空間差分補償方法
趙塔, 陳雨薇, 周志堅, 程德福
(吉林大學儀器科學與電氣工程學院,吉林長春130026)
在水下地磁導航技術中,載體的干擾磁場是影響地磁場測量的關鍵因素之一。為了實現對載體更好的航向控制以及提高地磁導航的精確度,需要對載體的干擾磁場進行補償。針對傳統模型方法不能全面描述干擾磁場種類的不足,改進了傳統測量模型表達式,提出了一種對載體干擾磁場進行補償的空間差分模型方法,并對方法中傳感器不同的安裝位置做了詳細的對比分析。通過仿真對補償方法進行了驗證,加入最大25nT外界雜散干擾磁場后,差分補償結果精確度為10nT,比傳統補償方法的精確度提高了兩倍。研究結果對水下載體地磁導航方法在實際中的應用具有一定的指導意義。
水下地磁導航;干擾磁場補償;傳統模型;差分模型
0 引言
導航定位技術在現代科學技術發展中處于基礎地位,并已經廣泛應用于各種軍用和民用領域。由于電磁波在水下會快速衰減,而慣性導航方法存在累計誤差等諸多問題,使水下運動載體的導航定位方法受到一定程度的制約,因此水下載體實現長時間精確的導航定位具有更大的難度[1]。而地磁導航主要以一種輔助導航方式被人們所接受,它具有無源、無輻射、隱蔽性好等優點,已經成為當前導航領域研究的熱點[2]。如何獲得導航區域內精確的地磁場成為地磁匹配的前提條件,也是決定導航精確度的關鍵因素之一。水下磁場環境復雜,載體自身的各種鐵磁性構件、電子設備以及周圍未知磁源等的磁場都會疊加在地磁場上,對磁力儀的測量造成干擾,因此必須對其進行補償[3-4]。載體干擾磁場的補償是地磁導航技術應用中必須解決的關鍵問題之一。目前,對海洋載體干擾磁場補償主要還是基于傳統模型的方法[5-6],李季、潘孟春等人提出的半參數模型法雖然能夠提高參數估計值的準確性[7],但它主要針對模型中的感應系數矩陣和固定磁場,并非改進了傳統補償模型。文獻[8]、文獻[9]對傳統模型方法進行了詳細的介紹和實驗驗證,結果證明傳統模型方法補償結果誤差較大,難以實現載體的精確導航。由于水下運行的載體處在一種特殊的環境,其周圍有很多未知的磁源,而傳統模型法采取的是單傳感器的測量和補償,導致測量磁場極易受到周圍環境磁場的干擾,而且傳統模型存在對載體周圍磁場類型描述不充分的問題,使補償后的結果產生極大的誤差。
本文在傳統模型方法基礎之上,詳細分析了水下環境載體周圍磁場特性,并根據分析結果構建了新的磁場測量模型,引入差分的求解思想推導出差分模型,并對差分補償方法中傳感器的安裝方案做了詳細的對比分析。該方法為提高地磁場三分量測量精度,增強補償方法的抗干擾能力提供了可能,最后通過仿真驗證了此方法的有效性。
1 傳統模型方法及存在問題
在水下存在多種運行載體,如水下機器人、潛艇、其他水下航行器等,它們大多都是由鐵磁性材料建造而成,當受到外界環境中的地磁場磁化后,會在自身磁矩的作用下向周圍輻射一些附加磁場,主要分為感應磁場和固定磁場。感應磁場主要由載體上的軟磁性材料受到外界地磁場磁化而產生,該磁場的大小與引起它的外界磁場滿足一定的線性關系,即載體上每一部分的感應磁矩正比于地磁場的各個分量。因此,感應磁場的大小和方向會隨載體姿態的不同而發生改變,滿足如下關系:
式中HR=[HRxHRyHRz]T為載體坐標系下感應磁場三分量,K為感應磁場系數矩陣,它是一個3×3的方陣,其大小只與載體的材料、形狀、傳感器的安裝位置有關。HG=[HGxHGyHGz]T為地理坐標系下地磁場三分量,A為地理坐標系與載體坐標系之間的變換矩陣,對于一個確定載體只要傳感器的安裝位置不變,該點的感應系數矩陣中的各個元素被視為常數,可以通過計算擬合得到。
固定磁場HS=[HSxHSyHSz]T是載體在建造過程中或長期停放受到相同方向地磁場的磁化而產生的剩磁,其值在短時間內認為是不隨時間發生變化的,。
由全部空間混合磁場的矢量疊加最終構成的傳統測量模型為[10]

式中HM=[HMxHMyHMz]T是載體坐標系下磁矢量傳感器三分量測量值,將式(1)式代入式(2)整理后得:

式中E為單位矩陣,式(3)是根據矢量傳感器測量數據和擬合參數進行補償的傳統模型。
對于實際載體而言,水下環境極其復雜,利用傳統模型來描述載體周圍磁場會存在一定的問題。由于載體在地磁場中運動還可能產生渦流磁場。載體的發動機、電氣設備等其他機構也會向外輻射低頻交流磁場。海底沉船、水面船只或周圍其他運動載體等也會產生一些雜散干擾磁場,這些磁場成分都會對地磁傳感器的測量造成影響,而傳統模型中將這些干擾成分全部忽略掉,這也是造成傳統模型方法補償精確度較低的原因之一。
2 差分模型建立
考慮到上述各種影響因素,需要對傳統模型做出改進,并提出新的補償方法。在式(2)中補充更多干擾磁場成分,得到載體上磁矢量傳感器測量磁場完整表達式為

式中HE是載體坐標系下的渦流磁場三分量,由于地磁場矢量自身梯度小,當水下載體實際運動速度相對較低時,產生的渦流磁場一般可以忽略;∑HA是載體坐標系下各種電氣設備產生的低頻交流磁場三分量,可通過設計合理的濾波器將其濾除。∑HN是載體坐標系下載體周圍其它磁源產生的干擾磁場三分量,它是一種或多種未知來源的外界雜散干擾磁場,既無法估計大小也不確定其方向,是測量中難以去除和補償掉的。在傳統模型補償方法中由于采取單傳感器測量無法去除這種成分而忽略掉了這部分磁場。因此,式(4)經濾波整理后,得到新的傳感器測量模型:

式中雖然∑HN具有不確定性,但它是水下復雜環境磁場中必不可少的成分之一,這部分干擾磁場會疊加到HM中,而傳統測量模型式(2)中只考慮了部分影響因素,并沒有對周圍干擾磁場進行全面描述。因此,忽略周圍雜散干擾磁場影響了傳統模型方法總體的補償精度。
如何補償掉式(5)中的HR、HS和∑HN成為面臨主要問題。針對上述問題,提出了基于多傳感器的差分模型,根據式(5)對兩個矢量傳感器構建如下方程組

由于地磁場各個分量自身梯度較小,我國從南到北地磁場水平分量強度主要隨緯度而變化[11],根據載體實際尺寸兩個傳感器安裝時的距離又比較近。因此,在地理坐標系下兩個傳感器測量的地磁場三分量與載體位置的地磁場三分量HG基本相同,滿足下面關系:

各種干擾磁場滿足磁場強度在水中衰減的經驗公式[12],磁場強度和距離的三次方成反比,再由一階和二階導數可知磁化體磁場呈衰減特性,且梯度隨距離逐漸減小。當測量位置與磁化體距離較近時,把載體自身看成磁化體,近距離處磁場強度的梯度較大,使兩個傳感器位置的感應磁場有較大不同,即感應系數矩陣K1和K2存在差異性。當測量位置與磁化體距離較遠時,把外界未知磁源看成磁化體,由于距離較遠磁場強度的梯度較小,因此可以把這部分磁場看成是均勻磁場,滿足下面關系式

通過上面的分析,將式(6)中的兩個方程做差,可得式(9)

上式為干擾磁場補償的差分模型,其中感應系數矩陣K1和K2以及固定磁場H1S和H2S在載體不同位置存在明顯差異,可以通過控制載體姿態在磁場變化平緩的環境下進行機動測量后估計得到,通常采取“8字旋轉法”或者“360°旋轉法”,常用的參數估計方法有橢圓約束法、基于Kalman濾波法、非線性最小二乘法[17]等。H1M、H2M和A的數據分別由矢量傳感器和姿態傳感器測量獲得。因此,通過上述差分模型即可對干擾磁場進行補償,特別對一些外界磁源產生的雜散磁場能夠起到較好的補償效果,從而獲得地理坐標系下的地磁場。
3 傳感器的空間布局方案
差分模型是基于差分思想對干擾磁場進行補償,為了更好的體現差分模型補償方法的優勢,傳感器的安裝位置要滿足一定的要求。水下載體根據流體力學原理一般采取左右對稱的梭形結構,因此傳感器應沿著載體上表面中軸線兩側安裝,同時,需要盡可能的縮短兩個傳感器的直線距離,使外界雜散磁場在兩個傳感器上產生的響應盡可能相同,從而在差分模型中將這部分磁場差掉,提高補償精確度。按照上述要求傳感器大致可以有三種安裝方法。如圖1所示,x軸在載體左右對稱的剖面上指向載體前進方向為正,y軸在載體中心平面上指向右側為正,z軸垂直xy平面向下為正。在載體上遠離尾翼的位置捷聯式安裝兩個或多個三分量磁傳感器。圖1(a)中兩個傳感器在同高度的平面上,具有相同的x和z軸坐標,稱其為水平對稱安裝。圖1(b)中兩個傳感器在圖1(a)基礎上在x軸方向產生一定位移,具有相同的z軸坐標,稱其為水平錯位安裝。圖1(c)中兩個傳感器在圖1(b)基礎上又在z軸方向產生一定位移,保證了兩個位置的三維坐標完全不同,稱其為空間錯位安裝。通過研究表明,磁化磁場各分量值是載體內部橫向(x軸方向)、縱向(y軸方向)和垂向(z軸方向)分別受地磁場三分量磁化后產生的,而圖1(a)和圖1(b)中傳感器安裝位置均具有部分相同坐標值,這樣會使在相同坐標值方向上產生的磁化情況比較接近,導致感應系數矩陣中各元素值和固定磁場各分量值之間區分度小,容易造成式(9)出現不可解的情況。因此,采取空間錯位安裝方式可以避免感應系數矩陣之差出現奇異矩陣,確保了差分測量模型的可解性。
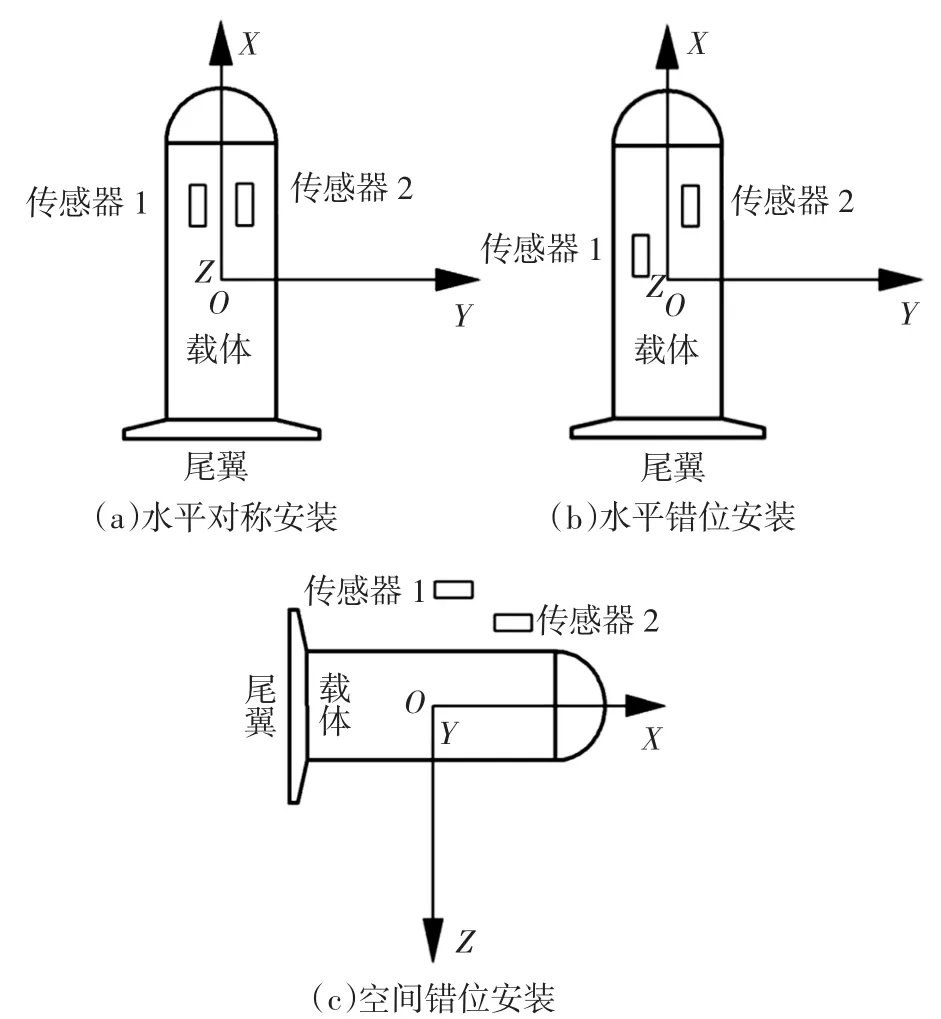
圖1 水下載體坐標系及傳感器安裝圖Fig.1 Underwater vehicle coordinate system and sensor installation diagram
4 仿真實驗研究
應用大型有限元仿真軟件對該方法進行仿真驗證,采用單橢球載體來構建模型[18-19],載體模型為長度50 m,寬度和高度均為5 m的橢球形空腔,腔體厚度為0.05 m,后端帶有尾翼,材料的相對磁導率為100。在模型上表面中軸線兩側以空間錯位的方式捷聯安裝兩個三分量傳感器,傳感器1離載體表面高度為1.0 m,傳感器2離載體表面高度為2.0 m,兩個傳感器的直線距離為1.73 m。在長、寬、高均為100 m的正方體求解域中加入x、y、z方向的矢量數據來提供均勻背景地磁場。在磁場屬性中添加初始磁矢量來提供載體自身三個方向的固定磁場。
首先,在∑HN=0的環境中進行相關參數的仿真求解。設置已知的地磁場三分量為[40 859nT 185nT-3 991nT],固定磁場分別為[120nT 150nT 170nT]和[125nT 165nT 185nT],根據360°旋轉法使模型水平旋轉一周,并伴有橫搖和縱傾動作,且橫搖和縱傾角不超過5°,角度的最大誤差為0.001°,得到的傳感器測量磁場數據如表1所示。
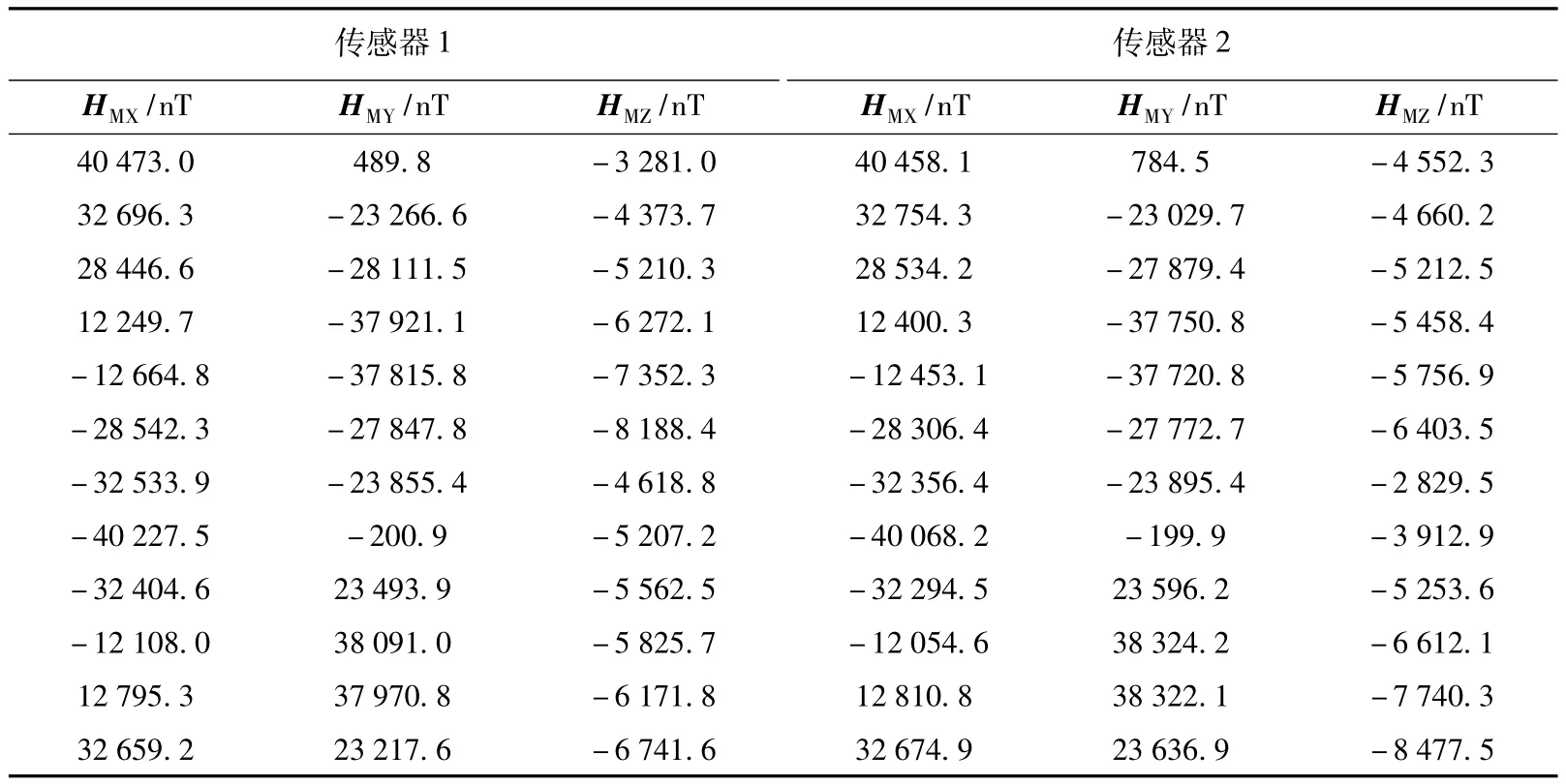
表1 傳感器測量磁場數據Table 1 Measurement data of multi-sensors
采用最小二乘法擬合出每個傳感器的感應系數矩陣和固定磁場結果為:
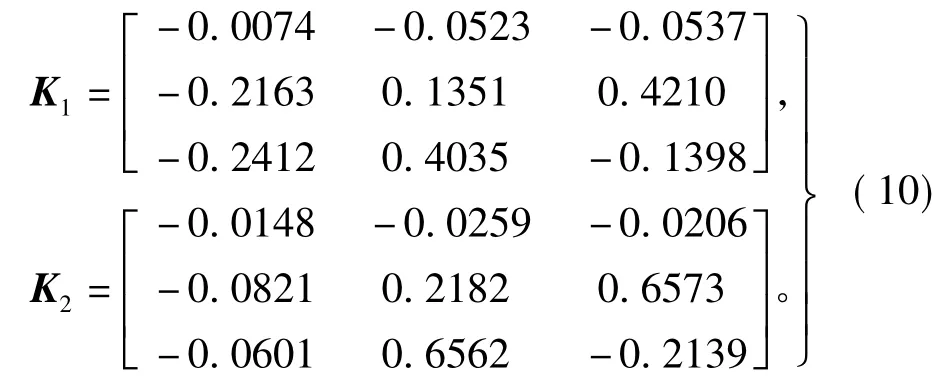

通過仿真計算可以得到固定磁場擬合值與真實值之間的相對誤差最大為0.5%,通過對傳感器的空間錯位安裝布局方式,使感應系數矩陣內部元素差值的有效位數最小為10-2數量級,并沒有因為差分計算而出現奇異矩陣,確保了差分模型數學表達式的可解性。
然后,在北緯5°東經110°到北緯6°東經111°海域,根據IGRF-11/2010模型均勻選取20個地磁場三分量數據進行仿真,假設過程中載體坐標系與地理坐標系相同。將估計出的相應參數帶入差分模型式(9)中對干擾磁場進行補償,為了更接近真實水下載體周圍磁場環境,在仿真測量數據中加入隨機干擾來模擬實際環境中的外界雜散磁場(∑HN≠0。設在傳感器上產生的雜散干擾磁場三分量最大幅值為±25nT,磁場梯度為2nT/m。
圖2所示為補償前和補償后磁場強度各分量值,圖中藍色圓圈實線為1號傳感器數據,黑色虛線為2號傳感器數據,“傳統模型結果”為兩個傳感器分別補償后結果的平均值,紅色實線表示的“地磁場實際值”是通過IGRF-11/2010模型獲得的地磁場數據。可以明顯的看到圖(a)、(c)、(e)中的磁場數據由于受到感應磁場、固定磁場和外界雜散磁場的共同影響與實際地磁場x分量產生的最大偏差大于700nT。通過圖(b)、(d)、(f)可以看出兩種方法都能夠對干擾磁場進行一定程度的補償,但傳統模型方法在加入外界雜散干擾磁場后其補償結果的誤差比較大,最大絕對誤差為30.0nT,最大相對誤差為19.1%。而差分模型補償方法受外界雜散干擾磁場的影響非常小,最大絕對誤差僅為10.0nT,最大相對誤差為4.0%。產生誤差的主要原因是由于仿真數據量有限,造成感應系數矩陣和固定磁場擬合估計值不夠準確,同時外界干擾磁場存在梯度也是造成誤差的原因。仿真結果不但說明了差分模型中各個參數估計值的可解性,還證明了差分模型法比傳統模型法在干擾磁場補償方面具有更高的精確度,在去除外界磁場異常方面具有更強的優勢,顯著提高了地磁場測量的準確性和可靠性。
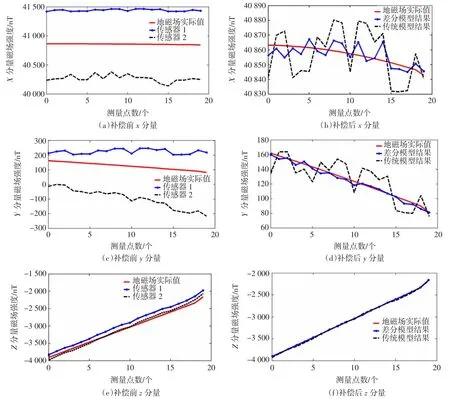
圖2 載體干擾磁場補償前和補償后磁場強度各分量值Fig.2 Vehicle interference magnetic field before and after compensation of each component of the magnetic field intensity
5 結論
本文針對傳統測量模型方法中單個磁傳感器在水下載體干擾磁場補償方面存在的抗干擾能力差、補償精確度低的問題,提出了基于多傳感器的補償方法,并通過傳感器的陣列式差分運算推導出了差分模型。在模型表達式中的差分形式僅受磁場的梯度影響,不受自身磁場強度大小的限制,這也正是此方法的優勢所在。而在傳統模型方法中,產生的外界雜散干擾磁場會直接被引入地磁場中,嚴重影響了補償精確度,并且當干擾磁場幅值越大時,其補償精確度越低。因此,差分模型法能夠更有效的補償載體的干擾磁場,特別是對外界磁異常體產生的磁場有更好的補償效果。仿真結果表明,存在外界干擾磁場時,差分模型方法補償精確度明顯高于傳統模型方法,而且相對誤差比傳統模型方法降低了15.0%,提高了地磁場測量數據的可靠性。為水下地磁場三分量實地測量中干擾磁場補償工作奠定了基礎。
[1]吳招才,高金耀,羅孝文,等.海洋地磁三分量測量技術[J].地球物理學進展,2011,26(3):902-907. WU Zhaocai,GAO Jinyao,LUO Xiaowen,et al.Marine measurement of the three-component geomagnetic field[J].PROGRESS IN GEOPHYSICS,2011,26(3):902-907.
[2]趙國榮,黃婧麗,胡正高.地磁輔助慣性組合導航技術分析[J].系統仿真技術,2013,9(2):119-123. ZHAO Guorong,HUANG Jingli,HU Zhengao.Geomagnetic aided inertial navigation technical analysis[J].System Simulation Technology,2013,9(2):119-123.
[3]LUKE S,LIU H H,DAVID J B.Navigation technologies for autonomous underwater vehicles[J].IEEE Transacti-on on Systems,Man,and Cybernetics-Part C:Applications and Reviews,2008,38 (4):581-589.
[4]黃珍雄,羅孝文,關云蘭,等.海洋地磁導航區域適配性分析[J].江西科學,2013,31(1):35-38. HUANG Zhengxiong,LUO Xiaowen,GUAN Yunlan,et al.The suitability analysis of marine magnetic navigation area[J].JIANGXI SCIENCE,2013,31(1):35-38.
[5]NGUYEN T S,GUICHON J M,CHADEBEC O,et al.Ship magnetic anomaly computation with integral equation and Fast Multipole method[J].IEEE Transactions on Magnetics,2011,47(5):1414 -1417.
[6]LESUR V,CLARK T,TURBITT C,et al.A technique for estimating the absolute vector geomagnetic field from a marine vessel[J]. Journal of Geophysics and Engineering,2004,(1):109-115.
[7]李季,潘孟春,羅詩途,等.半參數模型在載體干擾磁場補償中的應用研究[J].儀器儀表學報,2013,34(9):2147-2152. LI Ji,PAN Mengchun,LUO Shitu,et al.Study on the application of semiparametric model in vehicle interferential magnetic field compensation[J].Chinese Journal of Scientific Instrument,2013,34(9):21-47-2152.
[8]閆輝,肖昌漢.一種海洋環境地磁場三分量的測量方法[J].海軍工程大學學報,2005,17(6):80-83. YAN Hui,XIAO Changhan.A method of measuring three-component geomagnetic field on ocean[J].Journal of Naval University of Engineering,2005,17(6):80-83.
[9]閆輝,肖昌漢,沈明,等.船載三分量測量算法的實驗驗證[J].海洋測繪,2010,30(3):27-29. YAN Hui,XIAO Changhan,SHEN Ming,et al.The experimental verification of ship three-component geomagnetic fieldmeasurement method[J].Hydrographic Surveying and Charting,2010,30(3):27-29.
[10]NOVUHIRO ISESAKI.A New Shipboard Three-component magnetometer[J].Geoph-ysics,1986,51(10):1992-1998.
[11]安振昌.地磁場水平梯度的計算和分析[J].地學科學進展,1992,7(1):39-43. AN Zhenchang.Calculations and analyses of the horizontal gradient of the geomagnetic field[J].Advances in Earth Science,1992,7(1):39-43.
[12]揚世周.航空磁力反潛淺談[J].艦船科學技術,1979(12),66-76. YANG Shizhou.Discussion of aeromagnetic anti-submarine[J]. Ship Science and Technology,1979(12):66-76.
(編輯:賈志超)
Spatial difference compensation method of underwater vehicle interference magnetic field
ZHAO Ta, CHEN Yu-wei, ZHOU Zhi-jian, CHENG De-fu
(College of Instrumentation and Electrical Engineering,Jilin University,Changchun 130026,China)
Vehicle interference magnetic field is one of the key factors of the geomagnetic field measurement in underwater geomagnetic navigation.In order to control course and improve the precision of geomagnetic navigation,it is necessary to compensate for vehicle interference magnetic field.Because the traditional model can't fully describe the interference magnetic field component,a new method was proposed based on a spatial difference model to compensate the interference magnetic field and to improve the compensation precision compared with the traditional model.The influence of the sensor installation location was analyzed and the best laying position of the magnetic sensors was found.To verify the proposed compensation method,a simulation experiment was carried out under the condition of±25nT stray outside interference magnetic field,and the simulation result shows that the accuracy of the proposed method is 10nT which is double than that of the traditional model compensation method.The proposed method was used to solve similar problems in underwater vehicle geomagnetic navigation.
underwater geomagnetic navigation;compensate for interference magnetic field;traditional model;difference model
10.15938/j.emc.2016.03.011
TM 154.3
A
1007-449X(2016)03-0071-06
2015-04-21
國家重大科研裝備研制項目(ZDYZ2012-1-02)
趙塔(1987—),男,博士研究生,研究方向為弱信號檢測、地磁導航技術;
陳雨薇(1994—),女,本科,研究方向為電機拖動與控制;
周志堅(1980—),男,博士,講師,研究方向為弱信號檢測、智能儀器;
程德福(1959—),男,教授,博士生導師,研究方向為弱信號檢測、智能儀器。
周志堅
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2016年1期)2016-01-11 16:53:24
Coco薇(2015年1期)2015-08-13 02:47:34
