視覺導航系統中圖像采集及處理技術綜述
2016-10-11 12:57:04潘廣堂李文文楊先海
科技視界 2016年24期
潘廣堂 李文文 楊先海
【摘 要】主要介紹了視覺導航系統中圖像采集及處理系統的基本組成和研究的意義,分析了視覺導航技術在各個行業的應用情況,根據國內外的發展現狀,對視覺導航系統中的目標檢測與跟蹤以及部分先進圖像處理技術作詳細介紹,指出了視覺導航技術的有關難點和未來的發展趨勢。
【關鍵詞】視覺導航系統;圖像采集;目標檢測與跟蹤;圖像處理技術
【Abstract】It introduces the basic components of meaning and research vision navigation system image acquisition and processing system. A simple analysis of visual navigation technology applications in various industries. According to current development situation of the visual navigation system target detection and tracking as well as some advanced image processing technology detail. He pointed out about the difficulties of visual navigation technology and future trends.
【Key words】Visual navigation systems; Image acquisition; Target detection and tracking; Image processing technology
0 引言
機器視覺是通過計算機處理圖像,提取所需信息的一門技術,完整的工作系統能夠自動獲取圖片或視頻信息,進行增強、分辨、測量、判斷并輸出結果。機器視覺技術的飛速發展為各行業的自動化發展提供了技術支持。機器視覺作為計算機輔助或替代人類視覺工作的技術,具有較大的潛力與開發難度[1]。充分合理的利用視覺導航技術不僅可以實現智能化,還可以實現人工無法完成的工作,解決實際生活中的不安全問題,在工業生產中可以代替人工,提高生產效率等。目前,視覺導航技術在機器人、無人機、全自動駕駛、農業機械等領域得到了較為廣泛的應用。行人檢測、汽車制動性能檢測、車輛檢測、測量車距與車速、檢測車道線、檢測交通標志等都已取得了比較成功的進展。經過業內學者不斷地創新研究,目前出現了基于單目、雙目和多目的視覺系統,以及與之相結合的對目標物體的顏色、形狀、邊緣、紋理等多種特征的跟蹤方法。
1 圖像采集及處理系統基本組成模塊
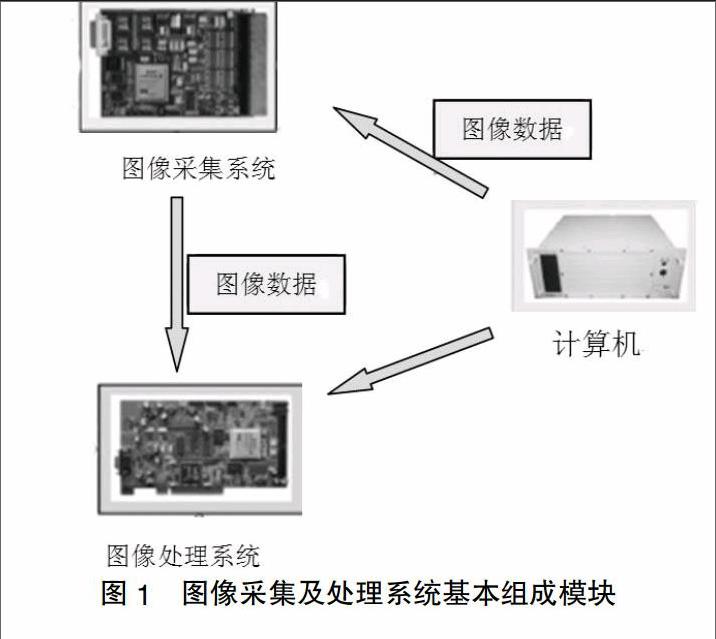
在視覺導航系統中,圖像的采集和處理是最為核心的步驟。通常由圖像采集系統和圖像處理系統為后續的編程、路徑規劃等導航工作提供有關的準確數據信息。如圖1所示:
圖像采集系統將獲取的圖像信息轉換為數字信號,將數字信號分別傳輸到圖像處理系統和計算機;圖像處理系統通過專用的硬件對數字圖像進行處理并獲得程序要求的如顏色、邊緣、紋理等參數信息,將信息傳送到計算機來計算[2]。
2 國內外近年研究現狀
在視覺導航系統中,以攝像機為主的視覺傳感器提供了最原始的視覺圖像。為了快速并且準確的檢測以及跟蹤目標,對圖像的處理和特征信息的采集是視覺導航系統中最基礎也是最關鍵的步驟。
2.1 視覺圖像采集及特征提取技術
圖像獲取及特征信息的采集是圖像處理的前提。以 CCD 技術為核心,目前圖像獲取設備有黑白攝像機、彩色攝像機、掃描儀、數字相機等,性能與價格主要取決于 CCD 的規格,如尺寸等。除了這些常見的類型外,目前有許多廠商提供各種其它的專用設備,如顯微攝像設備、紅外攝像機、高速攝像機、膠片掃描器等等。遙感衛星、激光雷達等設備提供其它類型的數字圖像。CMOS(Complementary Metal Oxide Semiconductor)即“互補金屬氧化物半導體”圖像傳感器的出現,使成像成本更低,而且易于大規模生產[3]。
2010年,許海霞[4]提出分層MS匹配搜索的思想,給出分層的MS匹配迭代跟蹤算法。2013年,張雪華等人[5]采用Kinect攝像機獲取RGB和深度圖像,并改進了增量直方圖算法。它的基本思想是根據增量式相似度計算來確定每個粒子的權值。在粒子濾波器中用粒子代替目標的一種可能性狀態,并且粒子濾波算法不需要滿足線性、高斯系統,應用更加廣泛。2014年,肖暉等人[6]引用了基于CCD相機獲取待檢砝碼圖像,Matlab中Roberts算子[7]對待檢砝碼的邊緣檢測。該算子檢測邊緣的精度比較高,但邊界有點粗,需后續的處理。Aurélio Campilho等人[8]提出了一種SSACA+EP算法,該算法整合了約束傳播機制納入其框架,不能鏈接制約整個相似矩陣,使得這一過程更有效率。但是由于幀的數量二次,使得該算法具有復雜性,他們計劃擴展這種算法到其他時間聚類算法。2015年,賈寶芝[9]提出了一種基于兩連續幀運動信息提取的TCF(Two Consecutive Frames) 模型,在不需要進行攝像機標定的情況下,利用運動信息獲取障礙物的相對高度,從而區分障礙物與陰影和標志線。該方法能夠將障礙物與道路陰影以及道路標志線區分開,同時要滿足實時性的要求,而且不需要對攝像機進行人工標定以及其他先驗知識。
2.2 圖像處理技術
惡劣的天氣和光照不均勻都會降低視覺圖像的質量;復雜環境中如何提取靜止或運動目標,確定目標數量,提取關鍵目標;在跟蹤過程中,目標出現遮擋、或相似目標干擾時,會導致發散甚至跟蹤丟失的問題。因此,視覺圖像的去噪、濾波、增強技術十分關鍵,對后續目標識別跟蹤的準確性、實時性產生較大的影響。
2000年,Adisorn Tuantranont等人[10]指出高斯(Gauss)濾波,就是為了得到較好的圖像邊緣、信噪比(SNR)較高的圖像而設計的一種很好的濾波方式。2005年,孫海濤[11]提出了一種CB數學形態學濾波處理方法。2006年,葉敏[12]提出一種基于FPGA的實時圖像模板濾波及邊緣檢測方法,將LoG[13]模板分解為兩個可分離模板的和,從而降低了算法運算量。并充分利用FPGA的并行機制及片內豐富的RAM資源,采用分布式算法[14],用查找表代替乘法器進行乘法運算。2013年,陳龍[15]提出了一種新的基于聯合雙邊濾波方法的惡劣天氣下的圖像增強算法。提取圖像的暗通道或亮通道,通過灰度膨脹腐蝕運算來估計環境光,然后通過快速的雙邊濾波技術[16]完成大氣幕和光照分量的相對精確估計。2015年,岳洪偉[17]對傳統的 Canny邊緣檢測算法[18]中高斯卷積和雙閾值設置這兩個步驟進行了算法的改進,提出三段式匹配預處理算法。
3 視覺導航技術未來發展趨勢
目前,隨著各類導航技術的不斷完善和多種圖像獲取、信號處理技術的快速發展,視覺導航技術得到了更為廣泛的應用。在部分領域視覺導航技術已經趨向成熟。但是由于工作環境變的越來越復雜,對視覺導航技術的魯棒性要求提高,在某些方面仍有很多關鍵問題需要解決。如以下幾個方面:
3.1 圖像獲取技術
視覺圖像的獲取是視覺導航技術最基本的要求,不同的圖像獲取方法得到的視覺圖像質量也有所差異。目前,有單目視覺、雙目立體視覺、多目立體視覺的視覺傳感器形式。單目視覺是利用單個攝像頭對環境進行識別的方法。通常單目視覺傳感器只能夠識別二維的環境信息而無法獲得環境的深度信息,計算速度快,但定位的準確性有待提高。雙目立體視覺的工作原理是對人類雙眼的仿生——通過兩個攝像機分別獲得場景的左、右圖像,然后通過三角測距的原理得到環境的深度信息。雙目立體視覺獲取的信息更加豐富,并且在對遠距離、小型障礙物的識別方面更有優勢。但是,雙目立體視覺系統存在的問題在于左右立體圖像對的匹配工作比較困難,而且容易受到光照的影響,在夜間的工作性能也大大下降。多目立體視覺同樣是利用了人雙眼成像的原理來進行環境的立體識別。但是,與雙目不同的是,多目立體視覺采用了三個或三個以上的攝像頭作為環境識別傳感器。采用多目立體視覺可以獲得更大的視野范圍,更高的識別精度,但是由于傳感器數目的增多而導致的數據處理量急劇增加,從而造成處理時間的增加,使其很難滿足系統的實時性要求。因此,圖像獲取技術的一個發展趨勢是找到一個同時滿足對目標檢測的實時性和準確性的圖像獲取方法。
3.2 圖像增強技術
為了增強對圖像分析和識別的能力,還需要突出有用信息,剔除圖像中其他景物內容的干擾,采取圖像增強技術。圖像增強的應用主要有兩類:一是,改善圖像的視覺效果;二是,突出圖像的特征,便于計算機處理。現有的圖像增強技術大致可以分為三類:空間域法、變換域法和模糊處理法。空間域法直接對圖像像素點的灰度值進行操作。針對不同的應用要求,采取灰度值變換或空間濾波等方法。變換域方法首先將圖像映射到某個變換域,然后在該變換域對圖像進行處理以突出圖像的某些特征。采用直方圖均衡化變換的方式對圖像增強處理,可以突出原圖像的細節,對邊緣檢測有很好的效果。但是在惡劣的環境中,噪聲對圖像影響較大,從而影響圖像增強效果。其中一個發展趨勢是針對不同的圖像采取圖像濾波、去噪處理與圖像增強技術相結合,進而取得更好的圖像增強效果。
3.3 圖像特征提取技術
獲取得到的目標圖像數據量巨大且含有很多與識別無關的信息,若直接利用圖像原始數據進行分類則計算量很大且不現實,必須對圖像進行特征的提取和選擇,特征提取若不恰當就會影響視覺導航的準確性。目前有基于顏色、邊界、紋理、表達、學習、模型以及其他特征的提取方法。一個好的特征一般具有可區別性、可靠性、獨立性、數量少等特點。單一的特征提取方法往往無法滿足目標跟蹤準確性的要求,多特征提取方法提高了準確性同時增加了計算復雜度。因此,再引入多特征的同時研究一種算法來提高計算速度是未來的一個發展方向。
4 結束語
本文主要介紹了視覺導航系統近年來國內外的發展現狀,對圖像處理及特征提取技術做了簡單總結并提出未來的發展趨勢。
目前,在圖像處理方面邊緣保持去噪方法[19]有較好的效果。基于均值、中值兩種濾波器,在繼承均值去噪和中值去噪優點的基礎上解決均值去噪會模糊圖像邊緣細節和中值去噪將濾除圖像中的線條細節的問題。針對圖像中車牌號的識別,基于均勻網格特征和改進的LBP特征的字符識別算法達到了較高的水平。均勻網格特征[20]對于車牌字母和數字字符而言,使用均勻網格特征來描述它能達到最好的識別效果,識別率為96.2%,識別耗時低,僅為0.25ms;改進的LBP特征[21]對于車牌漢字字符而言,使用改進的LBP特征來描述它能達到最好的識別效果,識別率為99.2%,識別耗時為1.97ms。視覺導航系統在實時性、魯棒性和準確性上不斷地創新和發展,相信未來會有更好的應用前景。
【參考文獻】
[1]朱明珠,趙云,沈英.車載機器視覺的應用概述[J].2014(1):50-51.
[2]Johnson A E,Ansar A,Matthies L H,et al.A General Approach to Terrain Relative Navigation for Planetary Landing[C]∥2007 AIAA Aerospace @ Infotech Confer-ence,2007:1498-1506.
[3]侯學貴.除草機器人雜草識別與視覺導航技術研究[D].南京,南京林業大學,2007.
[4]許海霞.機器視覺標定與目標檢測跟蹤方法及其應用研究[D].湖南,湖南大學,2010.
[5]張雪華,劉華平,孫富春,高蒙,賀超.采用 Kinect 的移動機器人目標跟蹤[J].2014,9(1):2-3.
[6]肖暉,韓軒,孫智權,趙不賄.基于的砝碼自動裝卸機械手圖像定位方法的設計與研究[J].2014(12):25-28.
[7]張兆禮.現代圖像處理技術及實現[J].北京:人民郵電出版社,2001.
[8]Aurélio Campilho, Mohamed Kamel. Audio-Visual Emotion Analysis Using Semi-Supervised Temporal Clustering with Constraint Propagation [J].2014:1-11.
[9]賈寶芝.視頻導航中的地圖生成、障礙檢測與行人人臉識別[D].安徽:中國科技大學,2015.
[10]Adisorn Tuantranont,Victor M Bright.Introduction to Micro Electro Mechanical Systems(MEMS) with Emphasis on Op?tical Applications[J].Technical Journal,2000,1(6):227-236.
[11]孫海濤.基于視覺導航的智能車輛自主行駛研究[D].合肥:合肥工業大學,2005.
[12]葉敏.基于視覺導航的實時圖像處理及FPGA實現[D].浙江:浙江大學,2006.
[13]D.Marr,E.C.Hildreth.TheoryofEdgeDetection.Proc.R.Soc.B[J].1980,207:187-217.
[14]劉凌,胡永生,譯.數字信號處理的實現[J].北京:清華大學出版社,2003.
[15]陳龍.輔助視覺中的圖像處理關鍵技術研究[D].西安:西安電子科技大學,2013.
[16]C. Tomasi, R. Manduchi. Bilateral filtering for gray and color images [C]. 6th IEEE International Conference on Computer Vision(ICCV),1998:839-846.
[17]岳洪偉.基于雙目立體視覺的汽車制動性能檢測系統研究[D].吉林:吉林大學,2015.
[18]Deriehe R. Using Cannys criteria to derive a recursively implemented optimal edge dctector[J].Internatio nal Journal of Computer Vision,1987,1(2):167-187.
[19]楊海璐.基于特征知識的視頻識別技術[D].北京:北京郵電大學,2015.
[20]李永忠,王玉雷,劉真真.藏文印刷體字符識別技術研究[J].南京大學學報,2012(1):55-62.
[21]危雨軒.魯棒的字符識別算法研究[D].北京:北京郵電大學,2013.
[責任編輯:王偉平]