超大型風電安裝船的操縱性和動力定位能力分析
2016-10-11 12:18:11屠海洋王思銘高家鏞張甫杰
中國航海 2016年1期
屠海洋, 王思銘, 高家鏞, 張甫杰
(1.上海船舶運輸科學研究所 航運技術與安全國家重點實驗室,上海 200135;2.南通中遠船務工程有限公司,江蘇 南通 226005)
超大型風電安裝船的操縱性和動力定位能力分析
屠海洋1, 王思銘2, 高家鏞1, 張甫杰1
(1.上海船舶運輸科學研究所 航運技術與安全國家重點實驗室,上海 200135;2.南通中遠船務工程有限公司,江蘇 南通 226005)
以超大型自航自升式海上風電安裝船MPI ADVENTURE為研究對象,對超大型船的操縱特性及其動力定位系統的定位能力進行分析。首先對代表船的結構參數和功能特點作簡要介紹;然后分析指出以全回轉推進器為動力的風電安裝船在自航操縱方面的特點,采用MARI DPCap軟件計算該船在不同推進器失效狀態下的動力定位能力;最后得出該船的定位能力滿足設計要求且具有一定冗余的結論。該分析對進一步了解目前最新型的風電安裝船的性能特點具有一定幫助。
水路運輸; 動力定位; 操縱性; 定位能力; 風電安裝船
Abstract: The object under research is the ultra large wind turbine installation vessel MPI ADVENTURE. The work focuses on the maneuverability and Dynamic Positioning(DP) capability of the vessel. The structural parameters and functional characteristics of the vessel are briefly introduced first and the maneuverability characteristics of this type vessel are analyzed. The DP capability of the vessel in diffrent failure states of the propellers is calculated. It is concluded that the DP capability of the vessel meets the design requirements with certain margin. The study gives us the knowledge about the performance characteristics of the most new type of wind turbine installation vessels.
Keywords: waterway transportation; dynamic positioning; maneuverability; capability for positioning; wind turbine installation vessel
風能作為新型綠色能源,是目前最具工業開發規模的可再生能源。海上風電資源豐富、風速穩定、對環境的負面影響較小,早已成為世界清潔能源發展的重要領域。加快發展海上風電將成為能源戰略上的一種必然選擇。海上風力發電機安裝作業平臺作為風力發電技術的重要設備,在海上風電發展方面有著舉足輕重的作用。
海洋風車安裝船是一種全新的海洋工程船,主要用于運輸和吊裝海上風力發電機。其融合了運輸船、海上作業平臺、起重船和生活供給船的各項功能,并裝有先進的動力定位系統和自動控制系統,操作靈活,可獨立完成風力發電機的運輸和安裝作業,全程無須其他船舶協助;此外,其還可通過自升工作平臺至水面以上,克服普通工程船工作環境不穩定的缺點。但是,平臺所經受的海洋環境復雜,其在運輸和就位過程中及風暴自存狀態下的載荷與動力響應嚴重影響著其工作效率和安全性。目前針對該類船舶的研究主要集中在全船結構強度分析和樁腿動力分析上,對其自航特性、動態定位過程及定位能力特性的研究較少。
這里以南通中遠船務為荷蘭VROON公司設計建造的自升自航式超大型海上風電安裝船MPI ADVENTURE (見圖1)為研究對象,對該船的結構參數和功能特點作簡要介紹,并根據船舶的實際情況對滿載航行時的操縱特性和就位過程中不同狀態下的定位能力進行綜合分析,供該類船舶的設計者和管理者參考。

圖1 自升自航式超大型海上風電安裝船MPI ADVENTURE
1 超大型自航自升式風電安裝船的特性與功能
1.1船舶的基本參數[1]
主要對船舶參數、推進器參數及船舶設計要求作簡要介紹,分別見表1~表3。

表1 船舶參數

表2 推進器參數

表3 船舶設計要求
1.2船舶的功能特點
由于海上風電機組對工作環境有一定要求,因此風力發電機安裝作業平臺往往在風浪較大的海上風電場區域作業,所遭受到的風、浪、流較為復雜,載荷也較大。作為集裝載運輸、自航自升、重型起重、動態定位和海上作業等多種功能于一體的自航自升式風電安裝船,其主要有以下幾個特點。
1)具有普通船的優點,無須拖船輔助,工作效率高、造價低,能獨立完成海上作業。
2)具有自升式平臺的優點,海上作業時樁腿插入海底,平臺主體被抬升至水面以上,可提供穩定的作業環境。
3)具有寬大的甲板空間,能放置海上施工設備,通用性較好,能完成多種海上作業。
4)平臺靈活、機動性較好,可在短時間內斷開與其他海上工作物的聯系,有利于在惡劣風浪到來之前及時、迅速撤離現場,避免不必要的經濟損失。
5)能在4.8 m浪高和14 m/s風速條件下完成海上風電機組的高精度吊裝。
6)裝有DP-2級動力定位系統,可在不用錨的情況下保持自動浮式準確定位及實現測量系統、控制系統和動力系統的有機集成。
7)平臺具有較好的操縱性,無須外力協助,可原地掉頭,靠離泊方便、靈活。
2 超大型自航自升式風電安裝船的操縱性分析
該船是海上風電運輸與安裝的專用船舶,航行中靠安裝在艉部的3臺全旋回推進器提供動力,這使得其具有優異的操縱性能。但是,該船的操縱模式[2]與傳統的定距螺旋槳舵葉船舶完全不同,正確掌握其操縱性能和推進器間的組合操縱是保證該船安全航行的關鍵。操縱習慣上的不同主要體現在以下幾個方面。
1)推進器的方向控制手柄與推進器是同步、同方向轉動的,手柄向右旋轉,則對應的螺旋槳也同步向右旋轉,產生的推力致使船首向左轉動。
2)船舶在航時一般采用隨動控制工作模式。由于船舶轉向是靠轉動推進器實現的,因此船舶高速航行時轉角太大可能會造成較大橫傾及損壞推進器。傳統的船舶操縱舵令和車鐘令不適合該類船舶。
3)該船的操縱有獨立機動和航行兩種模式,其中獨立機動模式主要用于低速下的掉頭、靠離泊和定位,通過各推進器的協調作用使船舶完成微速前進和后退、原地旋回及橫向移動等動作。
本船屬于淺吃水肥大型船,具有良好的回轉性,但低速直航時航向穩定性較差,需要通過適當轉動推進器的角度來調整航向和航跡。由于船舶較寬,因此其橫搖和縱搖的大小對甲板貨物的安全有較大影響。研究報告[1]表明,航速和水深對平臺的運動響應影響很大。圖2為船舶不同航速下的縱搖運動曲線。

圖2 不同航速下的縱搖運動
從圖2中可看出,為保證船上風力發電機的安全,可通過適當減小航速來改善船舶的搖蕩性能,但船速不能過低,否則會引起較大的縱蕩和縱搖。
3 超大型自航自升式風電安裝船的動力定位能力分析
動力定位能力是指裝有動力定位系統的船舶或平臺在給定的工作環境下保持位置不變的能力。[3-4]其不僅可以作為動力定位的評價標準,而且能為優化推力系統設計提供依據。
該船除了具有自航能力之外,還有動力定位能力,能使船舶準確地將樁腿插入設定的海底后升出海面,避免浪和流的影響,為快速、安全地安裝海上風力發電機創造條件。當動力定位系統出現故障或維修時,會導致部分推進器停止工作,進而對船舶的動力定位能力產生一定影響。因此,為保證船舶能在設計海況條件下保持在某一位置上,其動力系統除了具備設計工況要求的參數之外,還要有一定的推力冗余。美國石油學會(American Petroleum Institute,API)規范給出的建議是以最大推力的20%作為推力冗余,推力器的最大推力取為極限推力的80%。分析船舶在不同動力失效狀況下的最大定位能力對船舶的安全生產有一定幫助,有利于操作人員在生產過程中作出正確判斷。
3.1不同推力失效情況下的動力定位能力計算
該船的動力定位能力為DNV DYNPOS AUTR,即DP-2。 根據DP-2的要求[4-5],安裝有DP-2動力定位系統的船舶在出現單個故障(例如傳感器、控制電板、控制閥、單個推進器及發電機等)時,可在規定的環境條件下在規定的作業范圍內自動保持位置和艏向。因此,除了選定所有推進器處于正常工作狀態之外,還選取可能出現單個故障的幾個系統狀態對其進行定位能力分析,具體如下(為方便說明,各動力表示見圖3)。
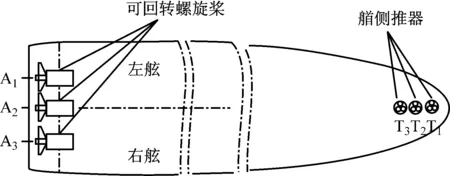
圖3 推進器的位置示意圖
1)完整模式:所有推進器正常工作。
2)失效模式一:T1號推進器失效——單個側推器失效下的情況。
3)失效模式二:A2號推進器失效——單個推進器失效下的情況。
4)失效模式三:T1號和A1號推進器失效——2個推進器失效下的情況;
利用荷蘭航海研究所開發的動力定位計算軟件MARI DPCap進行計算。在計算動力定位能力之前,要對不同的定位狀態進行建模。由于DPCap系統已在其數據庫中保存計算所需的系數(也可自定義風、浪、流計算系數),因此建模過程比較簡單。各工況輸入的數據主要有船舶參數、環境參數和動力參數。根據軟件界面要求輸入船舶設計數據,其中:各結構的受風面積和形狀系數見表4,風浪關系見表5。在動力欄中輸入相應的艏側推器和艉部全方位推進器對應的數據。

表4 各結構的受風面積和形狀系數

表5 風浪關系
輸入船舶、環境和動力數據之后,軟件即可進行定位能力計算,計算結果見圖4~圖7,其中:軸向風速單位為kn,風浪流假定為同向;根據船舶設計的要求,潮流流速分別取1.0 kn,1.5 kn和2.0 kn;浪高值是軟件根據風速大小自動取的值。

圖4 完整模式不同流速下的定位能力圖
3.2超大型風電安裝船動力定位能力分析
一般利用船舶不同狀態下的動力定位能力曲線(如圖4~圖7)對動力定位能力進行分析。該曲線是一條在極坐標上從0°~360°的封閉包絡線,曲線上的半徑坐標表示該舷角下船舶能定位的最大風速。定位能力曲線在船舶實際操作中具有極其重要的作用,能明確顯示船舶在不同狀態下的定位能力,有助于操作人員在船舶定位之前和定位過程中作出正確的判斷。

圖5 單個艏側推器T1失效下的定位能力圖

圖6 單個推進器A2失效下的定位能力圖

圖7 推進器T1和A1同時失效下的定位能力圖
3.2.1推進器完整狀態下的定位能力
該船在流速為2.0 kn,風速<32 kn時,具有全方位控位能力;在風速為60 kn時,其控位風舷角在艏部±15°之間和艉部±20°之間;在風速為80 kn時,只有頂風流狀態下才可控位。即在6級風、2 kn潮流以下,船舶能全方位定位;在頂風狀態下,船舶能頂住80 kn的颶風保持船位不動。由以上分析可知,流速變化對船舶的定位能力影響較小,影響較大的是風速和風舷角(風舷角在30°~100°時影響較大)。
3.2.2單臺艏側推器失效狀態下的定位能力
艏部安裝完全相同的3臺隧道式側推器,縱向排列,考慮到轉艏作用的大小,取離舯部最遠的側推器T1失效時的狀態進行動力定位能力分析。經過計算,可得不同流速下的定位能力曲線圖(如圖5所示)。由該圖可知,在流速為2.0 kn,風速<22 kn時,該船具有全方位控位能力;在風速為60 kn時,其控位風舷角為艏部±15°和艉部±20°之間;在風速為80 kn時,其控位能力只有在風舷角±10°之間才行。風力繼續增強,船舶將失控并發生漂移。
3.2.3單臺艉推進器失效狀態下的定位能力
艉推進器為3臺全回轉式推進器,橫向排列,轉向靈活。3臺推進器在縱向和橫向上產生力的能力是相同的,但同樣的力對船的轉彎力矩不同,A1或A3失效會使船舶定位能力曲線左右不對稱。在不對稱失效的情況下,容易使一些特定方向上保持定位所需的推力器最大推力變大,造成該方向上的定位能力減弱,進而導致船舶的定位能力減弱。從圖6中可看出,在單臺艉推進器失效的情況下,船舶在1.5 kn流中的最大全方位定位能力仍達到38 kn風,比單個艏側推器失效時的定位能力要強。隨著流速增加,船舶定位能力下降。
3.2.4艏艉各一臺推進器失效狀態下的定位能力
在該條件下,船舶的艏艉動力都損失1/3,船舶的定位能力大幅度下降。在1 kn流中,船舶只有在<6級風的條件下才能達到全方位定位;而在2.0 kn流中,船舶的最大全方位定位能力只能達到18 kn風。因此,船舶在該狀態下無法滿足設計條件下的定位能力要求。
由以上分析可知:在動力完整的情況下, 船舶在2 kn流、32 kn風以下狀態下有全方位控位能力;在單個推進器失效的情況下,船舶的控位能力下降,但仍能在2 kn流、22 kn風或1.5 kn流、26 kn風中全方位控制船位;在雙推進器失效的情況下,船舶的定位能力無法達到船舶設計要求。由于船舶頂風狀態下的控位能力優于其他狀態,因此船舶在大風中盡量采用頂風或偏頂風定位,以利于安全。
總體而言,MPI ADVENTURE船的動力定位能力達到了設計要求,能在設計的海況下進行定位,且有一定的冗余。但在某臺推進器失效的狀態下,船舶定位的冗余度不大,需要及時修復失效推進器,避免其他推進器長時間高負荷運行。
4 結束語
以MPI ADVENTURE為研究對象,分析超大型自航自升式風電安裝船的航行和操縱特點;考慮到DP-2級動力定位系統對冗余度的要求,計算不同狀態下單臺推進器失效情況下的船舶動力定位能力,并對結果作一定的分析。由計算結果可知,船舶能在設計要求的環境下產生足夠的推力來抵抗風、浪和流等3種環境載荷,能有效定位且具有一定的冗余。
[1] 超大型海上風電安裝作業平臺海洋環境載荷與運動特性分析研究報告[R].南通:南通中遠船務責任有限公司,2014.
[2] 黃海曦,陸悅銘.全旋回推進器船舶的引航操縱[J].水運管理,2014,36(5):16-18.
[3] 李軍,方泉根,龔少軍.海工船動力定位能力分析系統研究與應用[J].中國航海,2014,37(1):120-125.
[4] 張本偉,楊鴻,陳瑞峰,等.動力定位控位能力分析方法探討[J].中國造船,2009,50(S):205-214.
[5] 馬超,莊亞峰,陳俊英.船舶動力定位系統技術[J].中國造船,2009,50(S):52-57.
AnalysisofManeuverabilityandDPCapabilityforUltra
LargeWindTurbineInstallationVesselTUHaiyang1,WANGSiming2,GAOJiayong1,ZHANGFujie1
(1. State Key Laboratory of Navigation and Safety Technology, Shanghai Ship and Shipping Research Institute, Shanghai 200135, China; 2. COSCO (Nantong) Shipyard Group Co. Ltd, Nantong 226005, China)
2016-01-26
江蘇省科技成果轉化專項資金(BA2011005)
屠海洋(1967—),男,浙江上虞人,研究員,碩士生導師,從事船舶航行安全與智能航海方面的技術研究。 E-mail:oceantu@126.com
1000-4653(2016)01-0074-05
U661.7
A
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
電機與控制應用(2021年12期)2021-02-28 07:55:52
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
海洋通報(2020年5期)2021-01-14 09:26:54
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
西南交通大學學報(2016年4期)2016-06-15 20:29:37
電網與清潔能源(2015年3期)2015-02-28 16:03:31
