大氣相干長度的瞬時測量
2016-10-10 02:49:49衛沛鋒林旭東王鳴浩
光學精密工程 2016年8期
衛沛鋒,林旭東,王 亮,王鳴浩
(1.中國科學院 長春光學精密機械與物理研究所,吉林 長春130033; 2.中國科學院大學,北京 100049)
?
大氣相干長度的瞬時測量
衛沛鋒1,2*,林旭東1,王亮1,王鳴浩1
(1.中國科學院 長春光學精密機械與物理研究所,吉林 長春130033; 2.中國科學院大學,北京 100049)
由于差分像運動監測法測量大氣相干長度需要多幀統計,本文應用波前結構函數法,提出了一種大氣相干長度的瞬時測量方法。該方法通過Shack-Hartmann波前探測器測量單幀短曝光畸變波前的Zernike系數;然后減去光學系統初始像差的Zernike系數,去除傾斜項,計算波前結構函數;最后,與滿足Kolmogorov湍流理論的大氣短曝光理論波前結構函數進行最小二乘擬合,得到瞬時大氣相干長度。利用湍流相位板構造了相應的測試系統,并進行了外場實測對比。結果表明:提出的基于波前結構函數法的測量結果與差分像運動監測法的測量結果基本吻合;不同格林伍德頻率下,標準差與均值之比小于4.1%,穩定性較好;外場比對累計16個夜晚,得到的平均偏差小于0.45 cm。該方法可以實現空間目標大氣相干長度的單幀瞬時測量,并可用于觀測站點的視寧度、自適應光學系統內部大氣湍流強度和地基大口徑望遠鏡主鏡視寧度的監測。
自適應光學;大氣相干長度;空間目標;瞬時測量;波前結構函數法
*Correspondingauthor,E-mail:weipeifeng@gmail.com
1 引 言
為獲取天文目標和空間目標的清晰圖像,地基望遠鏡口徑越來越大,但其分辨率卻受限于大氣相干長度。為克服大氣對望遠鏡分辨能力的限制,自適應光學系統已經成為地基大口徑望遠鏡必不可少的技術單元[1-2]。
天文學家一般用大氣相干長度r0或者視寧度來表征大氣在空域上對望遠鏡分辨率的限制。大氣相干長度定義為位相起伏的均方值為1 rad的圓域或子孔徑的大小,國際上一般用差分像運動監測法(Differential Image Motion Monitor,DIMM)來測量r0[3]。該方法的實質是依據湍流凍結假設用差分到達角的時域起伏方差來獲取大氣畸變波前的空域統計特征量r0。DIMM的測量結果與目標仰角相關,且一般需要一分鐘或數百幀的數據來獲取一個有效數據,觀測目標多為靜止不動或運動很慢的恒星或行星目標,所以不適用于監測仰角變化快、觀測時間短的空間目標。空間目標的大氣相干長度如何變化,是否遵循理論上與目標觀測仰角正割的6/5方成正比,以及量級都有待進一步地明確。
1975年,Fried推導了差分到達角起伏的方差公式[4],該公式成為差分像運動監測法的基本原理。1990年,M.Sarazin通過40 s200 frame的連續曝光來監測大氣相干長度[5-6]。2000年,饒瑞中采用三星點像運動法[7]來測量大氣相干長度,并于2007年提出了改進的四孔差分星點像運動法[8]。2010年,他們采用該方法對Dome效應進行了監測,計算樣本數為200 frame,測量時間為3 s[9]。2013年,陳浩[10]通過將一對星點像增加為Shack-Hartmann波前探測器上呈正方形分布的十二對星點像來增加空間統計特征,計算樣本數為300 frame。上述方法的改進思路類似,都是通過增加空間統計特性來提高測量結果的穩定性。2014年,黃德權[11]提出通過波前分布的時域剩余方差來計算大氣相干長度,同樣需要一定的觀測時間和幀數。因此,上述方法均不適用于測量角度變化快、觀測時間短的空間目標的大氣相干長度。
本文利用Shack-Hartmann波前探測器測量的單幀短曝光畸變波前的Zernike系數,計算大氣波前結構函數,通過與理論結果對比來獲取瞬時大氣相干長度。并利用可控制、可重復的湍流相位板構造了相應的自適應光學測試系統,對該算法進行驗證。同時,還進行了累計16個有效觀測夜晚的實測比對。
2 波前結構函數法測量瞬時大氣相干長度的原理
對于多數觀測時間只有1~2分鐘、且仰角快速變化的空間目標來講,如果能直接提取空域統計信息,就可實現r0的瞬時測量。而波前結構函數是波前在光瞳面上的空域一維二階統計量,這里設法從波前結構函數提取r0。
結構函數定義為不同空間間隔下成對點之間的波前相位差的平方的統計均值,即有:
Dφ(r)=〈[φ(x+r)-φ(x)]2〉x,
(1)
式中:r為成對點之間的空間間隔,φ為相應位置的波前相位,x表示光瞳面上的空間位置,三角括號表示所有x處的統計平均。
Shack-Hartmann是目前自適應光學系統最常用的波前探測器。通過波前解析可以得到短曝光單幀畸變波前的Zernike系數,從而可得到對應的波前結構函數的測量值。另外,短曝光條件下,滿足Kolmogorov湍流模型的理論大氣畸變波前的結構函數為[12]:

(2)
式中:d為望遠鏡主鏡口徑,2σ2代表大氣散射損失,這里忽略不計。對不同大氣相干長度對應的波前結構函數的理論值和測量值進行最小二乘擬合,便可求解得到瞬時的大氣相干長度,此時測得的是對應目標觀測仰角處的大氣相干長度。而望遠鏡觀測站點的整層大氣相干長度須歸一化到天頂角處來進行監測,所以須對式(2)進行修正:

(3)
式中:ζ為天頂角,r0′ 為式(2)的測量結果。
瞬時大氣相干長度的計算流程如下:(1)獲取Shack-Hartmann測量的短曝光(曝光時間須小于大氣相干時間)單幀畸變波前的Zernike系數;(2)減去光學系統初始像差的Zernike系數;(3)計算測量波前去除傾斜項后對應的結構函數;(4)按式(2)計算對應r0從0.01~10 m間隔為0.001 m對應的理論波前結構函數;(5)對比結構函數的理論值與測量值,求大氣相干長度的最小二乘估計;(6)如果需要監測天頂角處的r0,按式(3)進行修正。
3 實 驗
為驗證上述算法,采用湍流相位板模擬大氣湍流構造了一套自適應光學測試系統,光路如圖1所示。25 μm直徑的白光光纖光源Source發出的光經過湍流相位板形成隨機波前。隨機波前經平面鏡1轉折光路后再經透鏡L1變為平行光入射到快速反射鏡(Fast Steering Mirror,FSM)上,然后反射到變形鏡(Deformable Mirror,DM)上,經透鏡L2會聚和分色片透射后在CCD上成像。分色片反射的光經透鏡L3準直后入射到Shack-Hartmann波前探測器中。

圖1 自適應光學測試系統光路圖Fig.1 Scheme of adaptive optics testing system
實驗光路中,FSM、DM和波前探測器均為自研,DM為97單元壓電變形鏡。Shack-Hartmann的曝光時間為1.98 ms,有效點數為97。湍流相位板為從Lexitek公司定制的相干長度為0.6 mm(@633 nm)的隨機相位板,相位分布滿足Kolmogrov湍流理論。通過改變湍流相位板的通光尺寸來模擬r0的變化。其原理如下[13]:

(3)
式中:D為模擬的望遠鏡口徑;r0′為湍流相位板的相干長度;D′為湍流相位板上的通光孔徑尺寸。通過調節湍流相位板的轉速來模擬格林伍德頻率fG的變化,fG與湍流相位板轉速的關系為:
(4)
式中v為通光孔徑中心處的線速度。
4 討 論
Shack-Hartmann波前探測器受0.6 mm湍流相位板影響的點列圖如圖2所示。由圖2可看出,湍流相位屏的加入使得原先亮度均勻、排列整齊、大小相同的點變得明暗不均、排列錯位、大小不一。

(a) 無湍流相位板 (b)0.6 mm湍流相位板(a) Without phase plate (b) With 0.6 mm phase plate圖2 Shack-Hartmann波前探測器點列圖Fig.2 Spot arrays of Shack-Hartmann wavefront sensor
大氣的格林伍德頻率fG約為50~90 Hz,內陸地區的r0一般小于10 cm,因此,調整湍流相位板轉速使得模擬的fG為60 Hz,調整通光孔徑r0為9 cm。采用本文所述方法計算模擬的湍流波前。首先,使Shack-Hartmann曝光時間小于大氣相干時間(一般約為10 ms),這里為1.98 ms,得到畸變波前的Zernike系數;通過設置參考或直接減去光學系統初始像差,得到大氣畸變波前的Zernike系數;預先計算得到不同項單位Zernike系數的結構函數,然后與大氣畸變波前Zernike系數相乘后累加,計算去除傾斜項后對應的結構函數;按式(2)計算對應的理論波前結構函數;最后,通過對比波前結構函數的理論值與測量值,求得大氣相干長度的最小二乘估計。實驗中,光束相當于直接從天頂角處入射,計算結果無須進行角度修正,但實際外場測量時則必需進行角度修正。8 625幀的湍流波前的測量結果如圖3所示。由于r0與波長相關,故后續計算結果統一歸一化到633 nm,以便于比較。r0測量均值為9.6 cm,標準差為3.6 cm,波動較大。圖4為Shack-Hartmann測量的波前均方差(Root Mean of Square,RMS),RMS均值為0.454 6λ(λ=633 nm),標準差為0.1λ,同樣波動較大。對比圖3和圖4說明:瞬時r0的測量結果同波前均方差RMS波動的周期性、幅度均類似,能較好地反映波前的瞬時變化特征,這也正是波前結構函數法測量r0的優勢。

圖3 fG=60 Hz,r0=9 cm時波前結構函數法的測量結果Fig.3 Result of wavefront structure function when fG=60 Hz and r0=9 cm

圖4 fG=60 Hz,r0=9 cm時波前均方差RMS的變化Fig.4 Variation of RMS of wavefront when fG=60 Hz and r0=9 cm
測量均值r0=9.6 cm與設計值r0=9 cm的波前結構函數的對比如圖5所示。從圖5可看出,測量均值與設計值的波前結構函數能夠較好地吻合;但是在大的空間間隔,即低頻處的偏差稍大。其原因有兩方面:一方面是大氣湍流理論模型引起的偏差。式(2)的理論前提是大氣湍流滿足Kolmogorov湍流模型,但實際的大氣湍流并不完全遵從該理論[14];另一方面,計算結構函數時低頻處的統計樣本數小于高頻處會引起部分統計偏差。

圖5 波前結構函數的測量值和理論值對比Fig.5 Comparison between theoretical values and experimental values of wavefront structure function
為驗證波前結構函數法測量瞬時r0的準確性和穩定性,同時模擬了r0=11,9,5 cm,fG=10~100 Hz,間隔10 Hz時的波前結構函數法和DIMM法測量r0的結果比較。為增加DIMM測量結果的穩定性,選取圖2所示的Shack-Hartmann點列圖中第4~8行,第3列、第11列共5對點的統計平均值作為DIMM方法的測量結果。兩種方法的測量結果對比如圖6所示,圖中實線為設計值,點劃線為擬合曲線。由圖6可看出,波前結構函數法的測量結果同DIMM法測量結果呈良好的線性關系,并且隨著模擬r0的變化,能同步反映波前的變化;但兩種方法的測量值存在一定的偏差,這是由于DIMM方法固有的空間采樣不足的缺陷,或者理論波前結構函數模型描述誤差引起的;兩種方法的測量值都同設計值存在一定的偏差,這可能是實驗過程中通光孔徑尺寸的設置偏差所引起的。從圖6還可看出,在模擬大氣湍流r0一定的情況下,當fG從10 Hz變化到100 Hz時,波前結構函數法測量的瞬時r0的標準差與均值之比的最大值小于4.1%,說明測量穩定性良好。
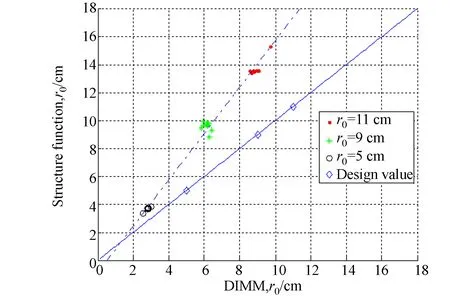
圖6 波前結構函數法和DIMM法測量r0的結果比較Fig.6 Comparison of r0 measured by wavefront structure function and DIMM
2011年10-11月累計16個有效觀測夜晚,在長春光機所自研的1.23 m自適應望遠鏡上分別使用波前結構函數法和DIMM法測量大氣相干長度,其結果對比如圖7所示。其中,曝光時間均為1.98 ms;累計8 000幀的平均值作為對比;DIMM法的單個r0的計算樣本數為200幀。圖7可看出,兩種方法測量結果的偏差均值為0.45 cm,標準差為1 cm,說明兩種測量方法的結果在數值和偏差上相當; 同時,隨時間變化,兩種測量結果在趨勢上趨于一致,這說明在監測整層大氣的r0上,波前結構函數法同DIMM法的精度相當。
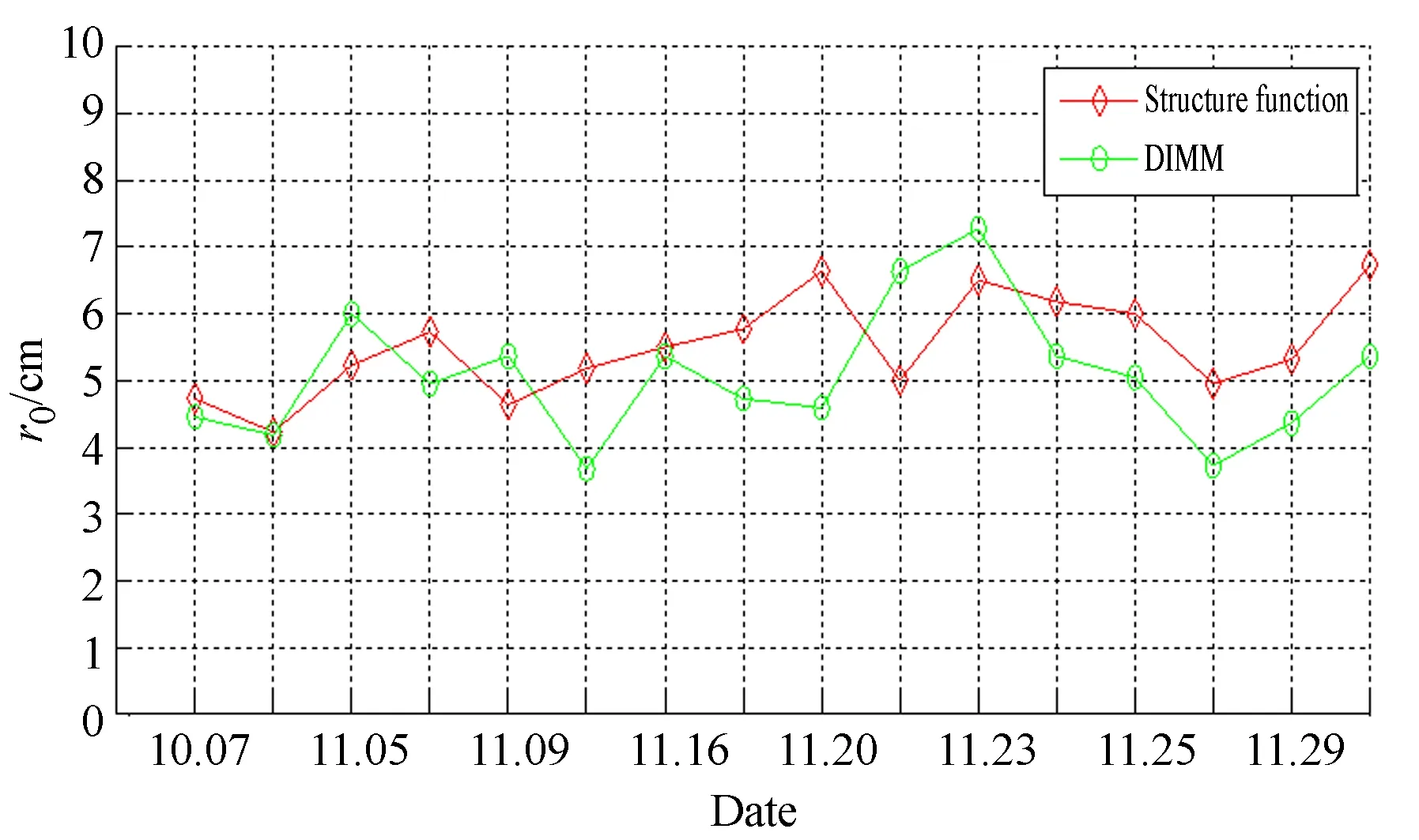
圖7 波前結構函數法和DIMM外場測量r0的結果對比Fig.7 Comparison of r0 measured by wavefront structure function and DIMM in field
5 結 論
本文基于應用波前結構函數法,提出了一種瞬時測量大氣相干長度的方法。實驗結果表明:波前結構函數法的測量精度同傳統的DIMM方法相當,實測偏差小于0.43 cm(16個有效觀測夜晚)。波前結構函數法能夠評價空間目標受大氣影響的r0尺度大小,突破了DIMM方法只能測量恒星或行星的限制。此外,單幀短曝光測量可避免震動對測量結果的影響。波前結構函數法避免類似DIMM方法空間采樣不足對測量結果的影響,拓展了視寧監測設備的適用范圍,可用于地基大口徑望遠鏡主鏡視寧度和自適應光學系統內部湍流的監測。
[1]賈建祿,王建立,趙金宇,等.自適應光學系統波前處理算法的優化[J].光學 精密工程,2013,21(4):1026-1031.
JIA J L, WANG J L, ZHAO J Y,etal.. Optimization of adaptive optical wave-front algorithm[J].Opt.PrecisionEng., 2013, 21(4):1026-1031.(in Chinese)
[2]林旭東,劉欣悅,王建立,等. 137單元變形鏡的性能測試及校正能力實驗[J].光學 精密工程,2013,21(2):267-273.
LIN X D, LIU X Y, WANG J L,etal.. Performance test and experiment of correction capability of 137-element deformable mirror[J].Opt.PrecisionEng., 2013,21(2):267-273.(in Chinese)
[3]于龍昆,吳毅,侯再紅,等.利用差分像運動監測儀法測大氣相干長度的研究[J].光學學報,2013,33(12):1201004-1-5.
YU L K, WU Y, HOU Z H,etal.. Study on the measurement of coherence length by differential image motion monitor[J].ActaOpticaSinica, 2013, 33(12):1201004-1-5.(in Chinese)
[4]DAVID L F. Differential angel of arrival: Theory, evaluation, and measurement feasibility[J].RadioScience, 1975, 10(1):71-76.
[5]MARC S, RODDIER F. The ESO differential image motion monitor[J].Astron.Astrophys, 1990,227:294-300.
[6]MARC S. ESO-VLT instrumentation for site evaluation in Northern Chile[J].SPIE,1986,628:138-141.
[7]饒瑞中,王世鵬,劉曉春,等. 湍流大氣中的激光束漂移的實驗研究[J]. 中國激光,2000,27(11):1011-1015.
RAO R ZH, WANG SH P, LIU X CH,etal.. Experimental study of spot dancing of laser beam in turbulent atmosphere[J].ChineseJournalofLasers, 2000,27(11):1011-1015.(in Chinese)
[8]黃宏華,姚永幫,饒瑞中.四孔差分像運動測量大氣相干長度的方法研究[J].強激光與粒子束,2007,19(3):357-360.
HUANG H H,YAO Y B, RAO R ZH. Measurement of atmospheric coherent length by four-aperture differential image motion method[J].HighPowerLaserandParticleBeams, 2007,19(3):357-360.(in Chinese)
[9]倪志波,黃宏華,黃印博,等. Dome效應對四孔大氣相干長度儀系統性能的影響[J]. 強激光與粒子束,2010,22(11):2551-2555.
NI ZH B, HUANG H H, HUANG Y B,etal.. Influence of Dome effect on system performance of four-aperture coherent length monitors[J].HighPowerLaserandParticleBeams, 2010,22(11):2551-2555.(in Chinese)
[10]陳浩,宣麗,胡立發,等. 大氣相干長度的穩定測量[J]. 光學 精密工程, 2013,21(4):911-918.
CHEN H, XUAN L, HU L F,etal..Steady measurement of atmospheric coherence length[J].Opt.PrecisionEng.,2013,21(4):911-918.(in Chinese)
[11]黃德權,周文超,邱紅,等. 哈特曼測量大氣相干長度研究[J]. 強激光與粒子束,2014,26(8):081003-1-6.
HUANG D Q, ZHOU W CH, QIU H,etal.. Research on measurement of atmospheric coherence length using Shack-Hartmann wavefront sensor [J].HighPowerLaserandParticleBeams, 2014,26(8):081003-1-6.(in Chinese)
[12]耿則勛,陳波,王振國,等. 自適應光學圖像復原理論與方法[M].北京:科學出版社,2010.
GENG Z X, CHEN B, WANG ZH G,etal..PerformanceAnalysisofAdaptiveOpticalSystemforSpatialObjectives[M]. Beijing: Science Press, 2010. (in Chinese)
[13]衛沛鋒,盧振武,劉欣悅,等. 自適應光學系統對空間運動目標校正性能分析[J]. 光子學報, 2015,44(7):0701001-1-7.
WEI P F, LU ZH W, LIU X Y,etal.. Performance analysis of adaptive optical system for spatial objectives[J].ActaPhotonicaSinica, 2015,44(7):0701001-1-7.(in Chinese)
[14]饒長輝. 非Kolmogorov湍流情況下低階校正自適應光學系統的性能研究[D]. 北京:中國科學院, 2000.
RAO CH H.PerformanceAnalysisofLow-orderCorrectionAdaptiveOpticalSystemforNon-KolmogorovTurbulence[D]. Beijing:Graduate University of the Chinese Academy of Sciences,2000.(in Chinese)

衛沛鋒(1984-),男,山西運城人,博士研究生,助理研究員,2006年、2009年于西北工業大學分別獲得學士、碩士學位,主要從事自適應光學、大氣光學的研究。E-mail:weipeifeng@gmail.com

林旭東(1982-),男,福建莆田人,博士,副研究員,2005于長春理工大學獲得學士學位,2010年于中科院長春光機所獲得博士學位,主要從事自適應波前校正技術方面的研究。E-mail:linxudong_82@126.com
(版權所有未經許可不得轉載)
Simultaneous measurement of atmospheric coherence length
WEI Pei-feng1,2*, LIN Xu-dong1, WANG Liang1,WANG Ming-hao1
(1.ChangchunInstituteofOptics,FineMechanicsandPhysics,ChineseAcademyofSciences,Changchun130033,China; 2.UniversityofChineseAcademyofSciences,Beijing100049,China)
When the differential image motion monitor method is used to measure the atmospheric coherence length, it needs a number of frames recorded with objective motions. Therefore, this paper proposes a simultaneous measuring method of the atmospheric coherence length based on the wavefront structure function for spatial objective. The method uses a Shack-Hartmann wavefront sensor to measure the Zernike coefficients of a frame of aberrated wavefront with short exposure. Then, it subtracts the initial aberration of optical system, removes the tip and tilt items and calculates the experimental structure function of aberrated wavefront. Finally, the simultaneous atmospheric coherence length is obtained by least-square approximation fitting with the theoretical structure function of aberrated wavefront satisfying the Kolmogorov turbulence theory. A test system is constructed by a turbulence phase plate and a number of experiments are conducted in an external field. The result shows that the measured atmospheric coherence length by using the proposed method based on the wavefront structure function matches well with that of the differential image motion monitor method. The ratio of mean value to standard deviation is less than 4.1% under different Greenwood frequencies and the mean difference of two methods is less than 0.45 cm in 16 effective nights. The method implements the simultaneous measurement of atmospheric coherence lengths of spatial objectives and also could be used to evaluate the seeing of observation sites, the atmospheric turbulence strength inside adaptive system and the mirror seeing of main mirror for a ground-based large aperture telescope.
adaptive optics; atmospheric coherence length; spatial objective; simultaneous measurement; wavefront structure function method
2015-11-13;
2016-01-07.
國家863高技術研究發展計劃資助項目(No. 2015AAXXX1003X)
1004-924X(2016)08-1840-06
P412.1
A
10.3788/OPE.20162408.1840
猜你喜歡
軍事文摘(2023年10期)2023-06-09 09:15:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
河北書畫研究(2016年2期)2016-08-24 02:14:50
新農業(2016年18期)2016-08-16 03:28:27
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56