雙基地前向散射雷達探測與成像
2016-10-09 11:03:16劉長江
雷達學報 2016年3期
胡 程 劉長江 曾 濤
(北京理工大學信息與電子學院 北京 100081)
(北京市嵌入式實時信息處理技術重點實驗室 北京 100081)
雙基地前向散射雷達探測與成像
胡程劉長江曾濤*
(北京理工大學信息與電子學院 北京 100081)
(北京市嵌入式實時信息處理技術重點實驗室 北京 100081)
前向散射雷達(Forward Scatter Radar,FSR)作為一種特殊的雙基地雷達,可以利用目標在穿越收發機之間基線的運動而形成的前向散射信號進行探測、成像與識別。由于前向散射效應對提高目標雷達截面積具有重要意義,因此,前向散射雷達在反隱身探測方面具有顯著的優勢。文章首先綜述了前向散射雷達截面積、前向散射雷達目標探測及陰影逆合成孔徑雷達(Shadow Inverse Synthetic Aperture Radar,SISAR)成像的國內外研究現狀,重點分析了前向散射雜波的統計特性、高精度參數估計與多目標分辨等關鍵難題;在此基礎上詳細介紹了前向散射雷達探測和SISAR成像研究的最新理論和實驗進展,首次給出了基于北斗導航衛星的民航客機前向散射探測實驗結果;最后,對前向散射雷達探測和成像的研究前景和發展趨勢進行了展望,為隱身目標的探測與識別研究提供一種新的技術手段。
雙基地;前向散射雷達;雷達截面積;目標探測;SISAR成像
引用格式:胡程,劉長江,曾濤.雙基地前向散射雷達探測與成像[J].雷達學報,2016,5(3):229-243.DOI:10.12000/JR16058.
Reference format:Hu Cheng,Liu Changjiang,and Zeng Tao.Bistatic forward scattering radar detection and imaging[J].Journal of Radars,2016,5(3):229-243.DOI:10.12000/JR16058.
1 引言
作為人類探測環境的重要工具,雷達已經經歷了上百年的發展史,并形成了完善的雷達信號處理學科體系,對目標的信息獲取能力越來越強大,極大地提高了戰爭中搜索、跟蹤目標的能力[1]。然而隨著隱身技術、反輻射導彈(ARM)、綜合電子干擾(ECM)和低空突防技術的發展,特別是隱身技術的迅速發展,對雷達提出了新的要求和新的挑戰[2]。傳統雷達已經難以應付這種挑戰,雷達的生存構成受到嚴重威脅,必須尋找新的技術發展途徑。人們提出并研制了多種新體制雷達,例如超寬帶雷達、長波段雷達、組網雷達和雙基地雷達等。其中雙基地雷達因其收發分置的幾何配置特點帶來了許多傳統單基地雷達所無法擁有的優勢。
雙基地雷達可以定義為發射機和接收機互相分離的雷達系統,而其雙基地角定義為發射機到目標連線和接收機到目標連線的夾角。如果雙基地角大于135°,則接收機位于目標的前向散射區,在這個區域內,目標的雷達散射截面積(Radar Cross Section,RCS)隨雙基地角的增大而迅速增大,通常比單基地RCS大十幾到幾十dB,當雙基地角等于180°時,目標RCS達到最大值。我們將接收機工作于目標前向散射區的雷達稱為前向散射雷達(Forward Scatter Radar,FSR)[3,4],其典型系統結構如圖1所示。FSR利用了目標RCS在前向散射區所體現出的諸多特性,對反隱身和小型目標探測具有重要意義。

圖1 前向散射雷達系統結構Fig.1 Configuration of FSR system
FSR通常利用目標穿越基線時的前向散射信號來進行動目標的檢測、跟蹤、成像和識別。與傳統的單基地雷達和雙基地雷達不同,FSR的工作是基于目標對電磁波的衍射效應,而非散射效應。由電磁場理論知,當目標被電磁波照射時,其自身表面電流會感應產生自散射場,同時如果目標尺寸大于或等于波長,由于目標邊緣對電磁波的衍射效應,在目標的后面會產生陰影場[5,6]。陰影場主要存在于雙基地角為180°附近的區域內,也叫做前向散射場。在這個區域陰影場通常遠大于目標的自散射場,可以近似忽略自散射場的影響。很重要的一點是陰影區域的目標散射截面積(Radar Cross Section,RCS)僅由目標的輪廓決定,而與它的3維形狀或材料無關。
當前的雷達隱身技術主要通過減弱、抑制、吸收和偏轉目標的雷達回波來降低目標RCS,使其在一定范圍內難以被敵方雷達發現和識別。但考慮到目標前向散射RCS不受目標形狀和材料影響的特點,傳統的隱身技術在前向散射區將完全失效。同時目標RCS在前向散射區迅速增強,通常比單基地雷達大十幾到幾十dB,也有效地提高了系統的敏感性[7],因此隱身目標探測是FSR的重要應用方向之一。此外,基于目標在前向散射區較強的RCS,也可利用FSR組網探測低空飛行的小型飛行器及行人、車輛等地面運動目標,在要地防空和戰場勢態感知方面發揮重要作用。由此可以看出前向散射雷達在目標探測方面的重大優勢所在。本文首先簡要回顧了雙基地前向散射雷達國內外發展歷程和研究現狀。在此基礎上,對雙基地前向散射運動目標探測和雙基地前向散射陰影逆合成孔徑成像這兩個關鍵技術進行了著重的展開描述,詳細介紹了一些關鍵問題的解決方法以及最新的研究成果。進一步地,對基于衛星信號的雙基地前向散射探測技術的發展進行了展望。最后一節給出結束語。
2 研究歷史與現狀
2.1國外研究歷史與現狀
雖然前向散射區RCS的增強效應很早就被發現,并且一些早期的雙基地雷達也具備在前向散射區工作的能力,如著名的AN/FPS-23 Flutter雷達等,但是由于FSR的信號處理技術在此期間并沒有得到相應的發展,造成前向散射效應對目標探測帶來的優點一直沒有被充分利用起來。直到20世紀80年代末期,隨著雙基地雷達目標檢測與跟蹤技術的迅速發展,才極大地推動了前向散射雷達的研究步伐,使得前向散射雷達的研究進入了一個新的階段。
最初設計研制FSR的目的主要是為利用前向散射區較強的RCS和其反隱身的潛力,探測隱身目標和低空飛行的飛機、導彈等目標。上世紀八九十年代,俄國人對FSR進行長時間的研究,并開發了大型的實驗系統。其FSR系統工作于UHF波段(波長0.77 m),發射天線和接收天線立于30 m高的桿上,兩者相距40 km。實驗目標包括Jak-52教練機、L-29噴氣飛機和米-2直升機等,其飛行高度都在100~200 m。實驗結果表明,當目標穿越基線上方且雙基地角大于135°時都可以獲得20 dB以上回波信噪比,而回波信噪比最大可達到60 dB以上[8]。鑒于系統采用了陣列接收天線以獲得多通道回波,俄國人同時研究了基于匹配濾波的檢測算法[9]、基于空時處理的量測參數估計算法[10]和基于高斯牛頓迭代的跟蹤算法[11]。
考慮到前向散射效應帶來的強RCS可以彌補無源探測較弱的發射信號功率,利用導航衛星作為發射源,地面布置接收機構成前向散射配置來探測空中目標也是FSR的發展方向之一。最早的,德國的GmbH 公司的V.Koch和R.Westphal于1995年在IEEE上發表文章[12],提出使用全球導航衛星系統(GNSS)進行無源多基地探測。對所采集的4組實驗信號數據的信噪比做了對比,實驗目標為小型螺旋槳飛機和輕型噴氣式飛機,分析結果表明所獲得的散射信號與目標之間是相關的。2012年,德國弗勞恩霍夫集成電路研究所的研究人員發表了利用GPS信號探測空中目標的最新成果[13],實驗利用GPS衛星作為發射機,利用右旋極化的半球天線作為接收機,在紐倫堡機場跑道附近的不同位置觀測飛機穿越時的GPS前向散射信號。由于積累時間較短(處理間隔變短),其數據率較Koch的結果有所改善。分析結果表明,依據飛機穿越位置、衛星信號和接收位置的不同,接收信號會出現不同程度的衰減、提升或震蕩。圖2是飛機穿越基線時同一位置接收到的不同衛星的前向散射信號,可以看出由于飛機的遮擋效應,可以明顯觀測到最大約30 dB的衰減,但同時也有一定提升產生,但最大不超過2 dB,這是由于飛機位置不同引起弗朗禾費衍射所導致。
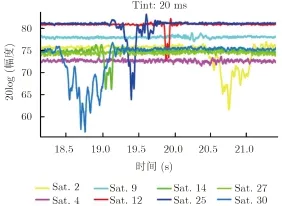
圖2 利用不同衛星觀測到的前向散射信號(20 ms非相參積累)[13]Fig.2 Forward scatter signal observed by different satellites(20 ms non-coherent accumulation)[13]
近些年來隱身技術也開始廣泛應用于地面/海面運動目標(如戰車、坦克、艦船等)。考慮到FSR對弱RCS目標探測的優勢,通過設計體積小、功耗低、易于布置且難以被發現的小型FSR并組網布置,可以實現對特定區域的勢態感知,如圖3所示,在對地面車輛、海面艦艇探測方面具有一定優勢[14]。進入21世紀以來,在英國伯明翰大學,由M.Cheniakov帶領的MISL(Microwave Integrated Systems Laboratory)實驗室開展了一系列有關前向散射雷達地面/海面運動目標探測的研究工作,并通過國際合作交流的方式發展了馬來西亞、保加利亞、意大利及中國的科研人員參與到FSR的研究中來。伯明翰大學開發的小型多頻FSR系統可以工作于VHF和UHF波段,使用包絡檢波從直達波中提取目標的散射信號[15]。
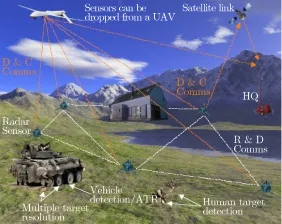
圖3 小型FSR組網探測示意[14]Fig.3 Illustration of forward scatter micro-radar network[14]
在地面目標探測方面,伯明翰大學的研究主要是針對車輛分類識別開展。其中,R.Abdullah等在2006年給出了基于回波功率譜的車輛目標識別方法[16],其采用估計過零點數的方法求解目標速度,并利用主成分分析和最近鄰法進行分類,對實驗數據的處理結果表明正確分類率可達60%以上。此外,R.Abdullah還給出了一種基于神經網絡的車輛分類方法[17]。在海面目標探測方面,主要由L.Daniel領導的小組進行研究,其采用的系統頻段較高(7.5 GHz),架設于海峽兩側,基線長度約數百米。對不同大小的艦船目標,其觀測到了形式差別較大的回波[18]。
FSR不僅可以對隱身目標進行有效的檢測與跟蹤,而且在應用陰影逆合成孔徑雷達(Shadow Inverse Synthetic Aperture Radar,SISAR)理論后,可以增加對目標成像和目標識別的能力,為目標分類識別提供了一種非常有效的新途徑,也使得FSR的研究進入了一個新的階段。上世紀80年代俄國人V.V.Chapursky發現前向散射陰影場與目標側影輪廓之間存在一定數學對應關系,進而提出了SISAR成像技術。
早期關于前向散射SISAR成像研究主要是以空中運動目標為研究對象。文獻[19]基于小衍射角假設、夫瑯禾費近似,首次提出了SISAR信號處理方法,使前向散射雷達具備了運動目標成像與識別能力。文獻[20]在文獻[19]基礎上,基于小衍射角假設、菲涅耳近似,對信號模型和成像算法進行了改進,克服了夫瑯禾費近似條件不滿足的情況。雖然這一時期的理論研究成果對前向散射雷達意義重大,但并未引起較多關注。直至2000年,V.V.Chapurskiy在國際雷達會議上公布了SISAR研究成果,并給出了實驗結果,SISAR信號處理方法才得到了廣泛的關注[21]。V.V.Chapurskiy在文章中指出利用目標前向散射信號功率譜函數差異,可對運動目標進行識別;并給出了小觀測角度下MiG-21、MiG-31及An-26三種不同形狀飛機的前向散射雷達實驗回波信號的功率譜函數,其形狀各異且與飛機的輪廓函數一一對應,首次實驗驗證了SISAR理論用于空中運動目標成像的正確性及目標識別的潛力。2015年,伯明翰大學發表了基于收發相參同步的FSR對地面車輛的SISAR成像結果[22](如圖4所示),驗證了收發同步條件下的SISAR成像能力。
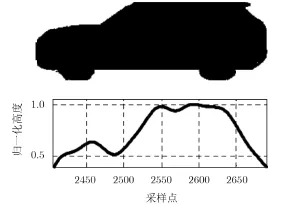
圖4 實測數據SISAR成像結果[22]Fig.4 Experimental SISAR imaging result[22]
2.2國內研究歷史與現狀
國內方面,早期有關FSR的研究主要由西安電子科技大學開展,其研究工作主要是在俄羅斯人研究基礎上,對空中運動目標成像技術進行理論分析與實驗驗證[23-29]。文獻[23]提出利用小波分析的方法,抑制雜波對SISAR成像的影響;文獻[24]分析了空中目標高度及位置對側影像的影響,提出了利用目標側影像歸一化極點相對位置作為特征量的目標識別方法。文獻[25]對文獻[23]和文獻[24]中信號模型進行改進,考慮了時間二次項對信號相位的影響。文獻[26]對空中目標輪廓中線提取方法進行了研究,用側影像相鄰分辨單元幅度及相位關聯特征判斷相位的卷繞,應用條件約束重構目標中線。文獻[27]利用地面車輛進行了L波段前向散射實驗,獲得了目標高度差像。文獻[28]和文獻[29]分別給出了兩種成像參數估計方法,適用于小衍射角SISAR成像運動補償。
北京理工大學自2006年起與英國伯明翰大學MISL實驗室的FSR小組開展聯合研究,在前向散射雷達雜波特性分析、運動目標參數估計與多目標分辨特性方面取得了豐富的研究成果。主要對地表雜波的幅度和頻譜統計特性進行了詳細研究,給出了地面運動目標速度的最優估計方法,并開展了多角度聯合參數估計的實驗研究。在此基礎上,基于我國新一代導航衛星系統(北斗二代),開展了基于導航衛星信號進行空中目標探測的可行性驗證實驗,成功獲取了民航客機的前向散射信號[30]。此外,北京理工大學從2010年起陸續發表了一系列有關SISAR成像技術的文章,其主要側重于大衍射角SISAR成像和SISAR成像實驗驗證,對SISAR成像技術的進展起到了重要的推動作用。
3 雙基地前向散射運動目標探測
與傳統單基地雷達相比,FSR的突出特點主要體現在兩個方面:獨特的散射機理及無距離向分辨能力。考慮到FSR系統是基于電磁波的衍射特性,而不是傳統的后向散射特性,因此無論是信號模型還是雜波模型都與傳統形式存在較大差異。同時,FSR距離分辨能力的缺失也給信號處理帶來很多困難:首先雷達覆蓋的大范圍區域的雜波都會進入接收機,雜波強度非常大;其次無距離分辨能力導致系統無法直接定位,只能依靠回波多普勒等信息非線性求解目標運動參數。因此,前向散射雜波統計特性分析與高精度目標運動參數估計是前向散射雷達運動目標檢測與跟蹤的技術基礎。這一節將從目標前向散射特性、雜波統計特性、運動目標參數估計方法及實驗驗證4個方面進行論述。
3.1雙基地前向散射RCS計算
雙基地前向散射RCS大于后向散射 RCS很早即被觀察到,并應用到了雙基地雷達的設想中。最早的R.E.Hiatt等在1960年給出了雙基地角為180°時前向散射RCS的計算公式(1),并通過實驗進行了驗證[31]:

其中,A為目標在入射波方向的投影面積,λ為波長。式(1)表明,目標前向散射RCS僅與投影面積和波長有關,與目標3維形狀和涂覆材料無關。進一步基于巴比涅原理,J.I.Glaser指出目標散射場與入射場照射一個其上開口形狀與目標投影輪廓相同的無限大不透明屏是相同的[32]。因此,在雙基地角接近180°時,前向散射RCS可以寫為:

其中,k為波數矢量,ρ為目標側影平面的坐標矢量,ds為微分表面積。當雙基地角等于180°時,式(2)就退化為式(1)。式(2)表明,前向散射RCS隨角度的變化與相同形狀且均勻照射的天線方向圖相同。隨后,J.I.Glaser在1989年也給出了一些雙基地在180°時的實測前向散射RCS結果[33]。1999年,A.B.Blyakhman等首次公開發表了真實飛機的前向散射回波功率的實測結果[8],如圖5所示,其中點線表示根據實測回波信噪比換算得到的RCS,實線表示利用式(2)得到的仿真值。

圖5 米-2直升飛機的前向散射RCS[8]Fig.5 Forward scatter RCS of Mi-2 helicopter[8]
3.2前向散射雜波特性分析與物理建模
雜波背景中的信號檢測通常要獲知雜波的統計特性,以此確定最優檢測策略及雜波抑制方法。針對前向散射雜波特性分析與物理建模這一問題,北京理工大學與伯明翰大學合作開展了一系列研究[34-38]。
研究首先針對雜波的統計特性進行分析,其主要包括幅度特性和譜特性。對幅度統計特性,3個載波頻率的雜波數據統計顯示:單通道雜波信號的統計特性曲線在小幅度時非常接近高斯概率密度函數,這也說明了在弱風時,雜波強度較弱且為各均勻散射體的回波數據,因此其統計特性接近高斯分布;而在強風時,由于強散射體(如樹干等)的擺動,出現了強散射體雜波,因此雜波的均勻性被破壞,在特性曲線的尾部與高斯曲線有一定的差距,反而更接近于指數分布。
對譜特性,通過對不同風速、頻率雜波功率譜的分析發現了前向散射情況下雜波的譜擴展對風速極不敏感這一特殊現象,風速的增加主要是對雜波強度的影響較大;并且同樣的風速情況下,雜波的譜擴展與載波頻率也不再是載波頻率之比的比例關系,雜波的譜擴展也幾乎相同,只有在強風的時候略有差異不同強度的雜波譜信號幾乎相同,也即雜波譜特性并沒有隨著風速的增加而成比例的增加。例如圖6中的實測數據處理完全看不到433 MHz載波頻率下的雜波譜寬是151 MHz載波頻率下的雜波譜寬3倍的結果。
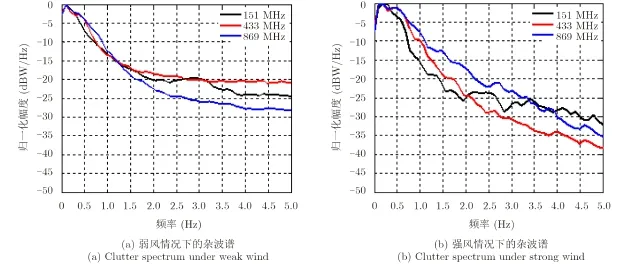
圖6 弱風和強風情況下不同載波頻率的雜波譜特征[34]Fig.6 Clutter spectrum characters under different carrier frequencies and wind intensity[34]
為解釋雜波統計分析中一些獨特的現象,結合前向散射雷達回波多普勒信號的形成條件,提出了利用鐘擺模型對植被雜波的強度和譜擴展特性進行定性的解釋。如圖7所示,前向散射雷達的植被雜波可以采用單擺振子模型來建模分析解釋,等效為大量的單擺振子進行無規則的單擺振動,擺動幅度隨風速變化;每個單擺振子具有自己固定的擺動周期,也即具有自己固定的振蕩頻率,在接收端形成具有接近各自振蕩頻率的整個雜波信號。鐘擺模型下定性解釋和理論分析得到的結果與實測數據處理結果的一致性充分表明了模型的有效性[34]。
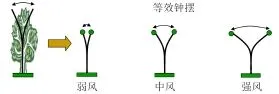
圖7 等效鐘擺模型示意圖[34]Fig.7 Illustration of the equivalent pendulum model[34]
此外,基于功率譜模型擬合的方法對雜波信號的功率譜進行了估計,對比了各種經典的功率譜模型與真實雜波數據功率譜形狀的差異,選定AR模型擬合實際功率譜密度函數;利用擬合的功率譜數學模型進行了雜波抑制的處理,而實測數據的處理結果充分地驗證了雜波抑制方法的有效性。圖8給出了一組經過雜波抑制處理的目標運動速度估計結果,實驗目標為人,載波頻率869 MHz。可以看出,在較高的載波頻率下,雜波信號太強,目標信號完全被淹沒。雜波抑制前和雜波抑制后的速度估計處理結果差異非常明顯:在雜波抑制前,無法進行有效的目標速度估計,而在雜波抑制后,其速度估計曲線較為平滑,存在明顯的峰值,并得到了精確的速度估計結果,充分表明了在高載波頻率雜波抑制的必要性,也證明了估計的雜波功率譜模型的有效性。

圖8 強風情況下的運動目標速度估計結果[34]Fig.8 Speed estimation result for moving target under strong wind[34]
3.3目標運動參數估計
與雜波分析相類似,FSR中的目標運動參數估計也是研究的難點與重點之一。按照目標的不同劃分,FSR中的運動參數估計主要分為地面/海面目標運動參數估計和空中目標運動參數估計。前者目標較小且速度較低,受雷達限制,一般只能獲取單通道回波數據;后者目標較大且速度較快,一般通過陣列天線獲取多通道回波數據,可以進行多普勒和波達角的估計。這些諸多的差異也決定了兩者信號處理方法的不同。
北京理工大學自2008年起與MISL實驗室聯合發表了一系列有關FSR地面目標運動參數估計的文章[39-43]。研究首先在考慮多徑影響、發射極化類型、球面波效應、觀測角度非線性變化及面目標模型的基礎上建立了地面運動目標的精確信號模型,并對接收回波功率進行了分析計算[40]。在信號建模和功率分析的基礎上,基于最優信號處理理論,提出了一種速度參數估計方法,并詳細地分析了各種非理想因素(非正交軌跡、非中點位置穿越基線及非零加速度情況)對速度估計性能的影響,并通過仿真數據和實測數據的處理對估計方法和非理想因素的影響進行了驗證[42]。考慮到實際情況中目標穿越基線中點的情況較少,并且穿越的位置點嚴重影響目標的多普勒信號,從而造成目標速度估計的偏差較大。因此在最大似然估計理論框架下,提出了任意情況下的多參數聯合非線性估計方法,該方法可以同時得到目標運動速度和穿越點位置的估計,并推導獲得了解析的克拉美羅界,進一步擴充了系統的工作區域和提高了系統的參數估計精度[43]。
圖9給出了一組多參數聯合非線性估計的結果。在實驗的設計中,目標(人)垂直穿越基線,穿越點離發射機距離10 m,基線長度50 m,載波頻率為151 MHz。從圖9中的處理結果可以看出,目標的估計速度為1.62 m/s,目標的穿越位置估計值為10 m和40 m,與真實值基本一致。多參數聯合的估計方法能夠精確地估計出目標的基線穿越位置,為沿基線方向提供一定的分辨能力奠定了基礎。
除此之外,也基于實驗數據對FSR對地面編隊目標的分辨能力進行了驗證。圖10是一大一小兩目標編隊情況,大目標為車輛,小目標為人。在實驗中,兩目標的距離設置為5 m,目標之間通過細繩相連保持固定的間距和相同的速度。通過對實測信號的估計處理,速度估計值為1.92 m/s,峰值之間的時間間隔為2.65 s,因此估計的目標隔離度約為5.08 m,非常接近設置值,同時兩個目標峰值清晰可見,表明兩目標得到了較好的分辨。

圖9 聯合非線性估計器實驗結果[43]Fig.9 Experimental result of joint non-linear estimator[43]
在FSR空中目標運動參數估計方面,北京理工大學在俄國人研究的基礎上進行了諸多改進,進一步提高了目標的初值估計和跟蹤精度[44-47]。其中針對傳統FSR目標跟蹤中存在的初始狀態估計誤差太大、跟蹤保持階段數據率低、計算量大、穩定性差的問題,在2013年提出了一種修正的FSR 3維跟蹤算法,算法基于解析推導和Levenberg-Marquardt算法提出了一種新的初始狀態估計方法,在相同參數估計精度下,初值估計誤差比經典方法降低了一個數量級,并使用修正的擴展卡爾曼濾波算法進行跟蹤保持[44]。最近在2015年IEEE雷達會議上發表的文章給出了一種基于最小二乘的FSR跟蹤初值估計算法[46],該方法在對觀測噪聲和不同航跡的適應能力上都遠優于現有算法。
3.4基于北斗導航衛星信號的前向散射目標探測
北京理工大學在2015年自主開展了一系列基于北斗導航衛星信號探測空中運動目標的驗證實驗。實驗利用北斗導航衛星作為發射源,地面布置接收機,構成前向散射配置探測首都機場附近起降的民航客機目標。實驗場地上方有數條民航客機飛行通道。采用全向天線接收導航衛星信號,如圖11所示。
對接收回波,采用導航星信號處理中的碼相關技術提取前向散射信號。理論分析表明,相參積累后的信號包絡可以看作直達波信號與前向散射信號的一路正交分量相參疊加的結果,這樣可以去除直達波的影響,利用抽取的前向散射信號進行目標檢測及參數估計等后續信號處理操作。具體信號處理流程如圖12所示。
基于實驗數據處理結果,首次觀察到了北斗導航衛星對飛機目標的前向散射信號。如圖13所示,可以明顯觀察到前向散射場對回波信號的相位和幅度調制,主要表現為近似線性調頻多普勒及陰影遮擋現象。

圖11 民航客機探測實驗場景與實驗設備Fig.11 Experiment scene and equipment for civil airbus detection
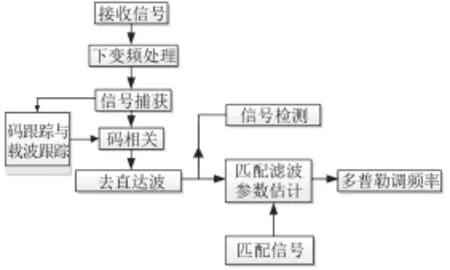
圖12 導航衛星前向散射信號處理流程Fig.12 Processing flow of GNSS forward scatter signal
當目標位于近似遠場時,如圖13(a)所示,此時回波多普勒近似為線性調頻信號,可以利用回波信號進行相關參數估計。根據理論推導可以給出目標平飛假設下前向散射回波多普勒Kr的表達式[30]:

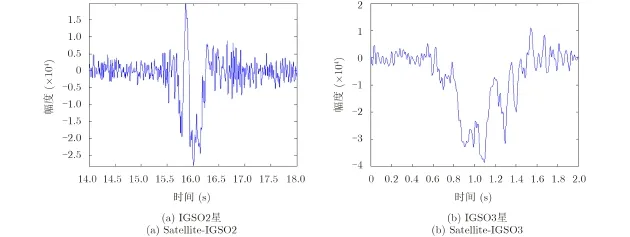
圖13 北斗導航衛星前向散射信號提取結果Fig.13 Forward scatter signal extraction of BeiDou navigation satellites
其中,v表示目標絕對運動速度,θSV表示衛星仰角,表示目標運動方向與基線在地面投影之間的夾角,λ表示信號波長,H表示目標距地面垂直高度。上述參數可以通過星歷軟件和網絡查詢獲得,實際中我們使用了星歷軟件Obitron來獲取衛星運動軌跡,輸入接收機經緯度116.637552E,39.899809N和模擬時間,即可以獲得此時北斗衛星相對于接收機的位置(俯仰角和方位角),如圖14(a)所示。同時利用航班查詢網站Flightradar24獲取飛機的運動信息,包括速度、高度、航向及位置等,如圖14(b)所示。
對圖13(a)中的信號,根據Obitron獲得其對應的衛星方位角為356.8°,俯仰角為73.8°;根據Flighradar24獲得飛機型號為波音747,飛行高度1044 m,飛行速度103 m/s,航向角354°。將上述參數代入式(3)可以計算得到其調頻率約為36 Hz/s。同時基于信號匹配的方法可以獲得對該信號調頻率的估計[42],其調頻率估計結果約為31 Hz/s,誤差約為14%。考慮到估計誤差及航班信息的延遲性,作為理論驗證該參數估計結果的精度可以接受。
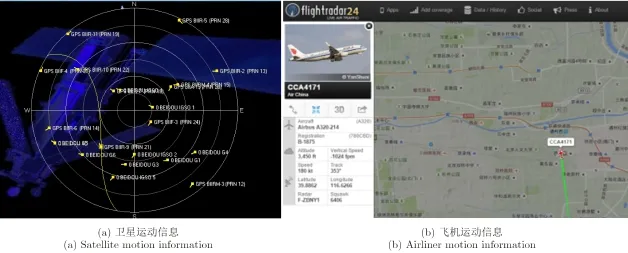
圖14 目標及衛星信息獲取Fig.14 Information acquisition for targets and satellites
4 雙基地前向散射SISAR成像原理與方法
在SISAR成像理論提出后相當長一段時間內對此項技術的研究都處于停滯狀態,其原因主要有兩點,其一是SISAR成像技術利用了類似于光學中的衍射理論而不是傳統雷達成像的后向散射理論,這一點不太容易被接受;其二是一直缺乏適于成像的實驗數據作為理論研究的支撐。實際上作為FSR特殊的目標識別技術,SISAR成像在FSR信號處理理論中占有重要地位。北京理工大學自2010年起,一直致力于SISAR成像技術的研究,在成像方法及實驗驗證方面開展了較多的研究工作[48-60]。這一節將從SISAR成像原理、成像方法及成像驗證3個方面進行論述。
4.1SISAR成像原理[21]
SISAR信號建模及成像方式與傳統雷達信號建模及成像方式有很大差異。其中,SISAR成像的目標前向散射信號模型可以通過黑體近似、巴比涅原理以及菲涅爾-基爾霍夫衍射理論得到[4]。
在雙基地情況下,當目標被電磁波照射時,散射場由兩部分組成:一部分是由入射波在目標表面形成的感應電流產生,被稱為目標的自散射場;另一部分是由目標對入射波前的部分遮擋產生,被稱為目標的陰影場。在前向散射雷達工作區域內,自散射場比陰影場弱很多,通常可以忽略其影響,這相當于把真實的目標看作一個絕對的黑體,在黑體的前向散射區域僅有陰影場存在。由于陰影場與目標3維形狀無關,僅由目標的陰影輪廓形狀決定,因此分析目標陰影場時,3維形狀目標可近似為一個具有目標陰影輪廓形狀的2維面目標,該面目標同時也是一個不透光屏。

4.2SISAR成像方法
由菲涅耳-基爾霍夫衍射公式給出的理想前向散射信號模型形式較為復雜,無法直接根據其求解目標側影輪廓。而SISAR成像方法則是在一定假設或近似的條件下將菲涅耳-基爾霍夫衍射公式進行化簡,使其中包含的目標側影輪廓信息易于數值求解。
俄國人最早提出的SISAR成像算法是在小衍射角條件下將目標斜距作關于基線斜距的泰勒展開[21],這樣前向散射信號與目標復輪廓函數(包含高度差像和中線像信息)是一個菲涅爾變換對的關系。如果考慮用FFT進行快速成像,前向散射信號在補償掉多普勒相位后與目標復輪廓函數是一個傅里葉變換對的關系[28],但這樣中線像會出現誤差。
考慮到傳統小衍射角SISAR成像算法受衍射角和斜距近似的限制,相參角度和成像精度都有限,因此,文獻[54]提出了一種高精度的大衍射角SISAR成像方法,該方法基于真實斜距歷程的2階近似方法獲得了精確的前向散射信號模型。
前向散射雷達成像系統結構如圖15所示,在大衍射角信號模型中,對目標側影輪廓上任一點的收發斜距rR,T作如下近似表示:

圖15 前向散射雷達成像系統結構示意圖Fig.15 Illustration of FSR imaging system structure


在此基礎上,大衍射角運動目標前向散射信號模型可簡寫為:

對大衍射角前向散射信號模型進行逆變換可得到大衍射角成像算法:

其中Ts為相參積累時間。在大衍射角成像算法中,由于精確補償了目標中心點多普勒相位、目標輪廓長度二次相位以及目標沿基線方向運動速度引入的相位,得到的復輪廓函數的相位可以精確地反映目標中線高度信息,這使得FSR可以精確提取地面運動目標的中線高度像。在大衍射角SISAR成像算法的基礎上,針對非垂直穿越目標輪廓投影面不與基線垂直的問題,文獻[53]提出了一種改進的大衍射角SISAR成像方法,可以對非垂直穿越目標更精確地恢復輪廓像;針對地面運動目標成像中存在的多徑干擾問題,文獻[54]研究了多徑干涉對目標前向散射RCS的影響以及對應的地面運動目標SISAR成像方法,并給出了車輛等地面目標的成像結果。
4.3SISAR成像驗證

圖16 車輛目標SISAR成像結果對比[52]Fig.16 Comparison of SISAR imaging results of vehicle target[52]
考慮到收發不同步的情況下利用包絡檢波方法一般只能提取單通道回波信號[4],并不適用于SISAR成像,因此早期關于SISAR成像的驗證都是基于仿真開展的。為保證仿真結果的精確性和有效性,一般情況下都采用未經近似處理的菲涅爾-基爾霍夫衍射模型構造回波信號,并進一步利用回波信號進行SISAR成像。圖16給出了一組車輛目標的小衍射角SISAR成像與大衍射角SISAR成像的對比結果[52],用于成像的信號對應接收方位角為-28°~28°。對比可以看出,在衍射角較大時,大衍射角SISAR成像算法可以精確恢復目標的高度差像和中線像,而小衍射角SISAR成像算法分辨率較低,中線像也出現了較大誤差。
為驗證SISAR技術在實際應用中的能力,進一步開展了地面運動目標SISAR成像的驗證實驗,實驗主要參數如表1所示。
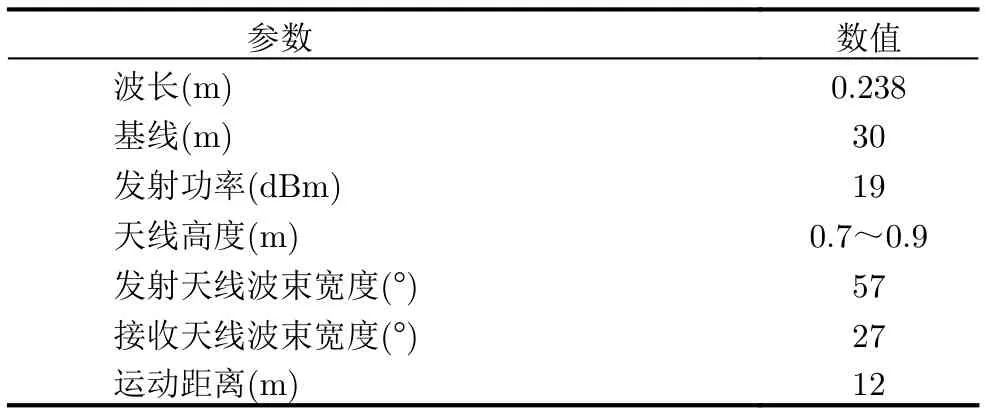
表1 SISAR成像驗證實驗參數Tab.1 Parameters of SISAR imaging experiment
實驗目標主要包括金屬質凸形板、木質凸形板及面包車等,如圖17所示。考慮到包括檢波只能提取單路實信號,因此在數據處理中采用了一種基于分段希爾伯特變換的復信號恢復方法[60],并利用恢復的正交復信號進行SISAR成像,其結果如圖18所示。由于目標中心相對天線的高度近似為0,因此只提取了高度差像結果。可以看出,所提取的高度差像和目標真實高度差像間有較強的一致性,驗證了SISAR技術對運動目標成像和識別的作用。

圖17 SISAR成像實驗目標Fig.17 Targets in SISAR imaging experiment
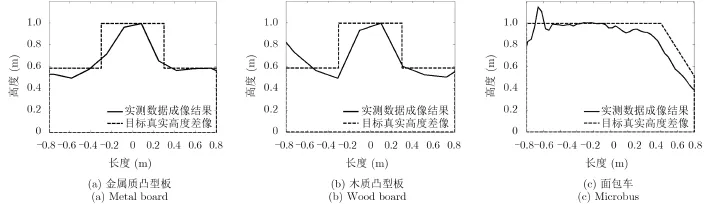
圖18 SISAR成像實驗實測數據處理結果[60]Fig.18 Processing results of SISAR imaging experiment data[60]
5 基于衛星信號的雙基地前向散射探測技術展望
近年來,隨著新一代隱身技術的發展(如“X-37B”的空天戰機),常規軍用雷達無法對其有效探測,受到越來越嚴重的威脅。雙基地及前向散射探測技術作為一種有效的對抗手段受到越來越多的重視。特別是隨著新一代衛星技術的發展,如新一代通信衛星(世廣衛星)、導航衛星(北斗二代)及遙感衛星(地球同步軌道合成孔徑雷達),其系統覆蓋能力、平臺和載荷能力都有大幅度的提升(采用大天線和大發射功率)。若在地面和空中布置接收平臺,極易構成雙基地配置或前向散射配置,使得目標的雷達散射截面積顯著增大,從而實現對隱身目標的探測。
目前可以考慮的發射源有導航衛星和地球同步軌道合成孔徑雷達(GEO SAR)衛星等,如圖19所示。其中導航衛星數目眾多,覆蓋區域廣,任意時刻任意地點可見多顆衛星(4顆及以上),但導航星的等效全向輻射功率(EIRP)相對較弱,即使在前向散射配置下目標的RCS可以增大50~60 dB,但仍然亟需突破如下關鍵問題:高增益接收機及長時間信號積累技術、時頻同步技術、高精度參數估計技術。
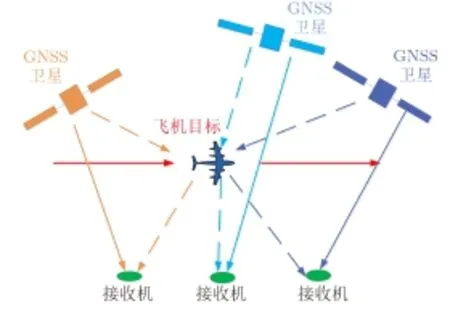
圖19 基于導航衛星的前向散射雷達組網Fig.19 Netted FSR based on GNSS satellites
地球同步軌道合成孔徑雷達(GEO SAR)衛星是運行在36000 km高度地球同步軌道上的SAR衛星,通過軌道參數的合理設計,一顆GEO SAR衛星就可以保證對我國及部分周邊國家的感興趣區域每天觀測一次到兩次,對重點區域甚至可以實現不間斷監視(圖20)。

圖20 GEO SAR對中國及鄰近區域的重訪時間Fig.20 Revisit time of GEO SAR to China and neighboring regions
目前,GEO SAR已被列入我國“高分辨率對地觀測”國家科技重大專項的重點攻關項目之一,并且已經完成背景立項。基于GEO SAR衛星照射(EIRP值可達73~81 dBW),在地面/空中布置多個接收天線以形成天-地雙基地前向散射雷達網絡,可以實現對特定區域內隱身目標或低可見目標的全天時、全天候遠距離監測,具有極大的應用潛力。但GEO SAR衛星數量受限且功率資源分配受限,因此亟需突破如下問題:最優衛星編隊設計技術、波束掃描與波束管理技術、時頻同步技術及高精度參數估計技術。
此外,如何利用FSR回波信息進行目標識別也是亟待研究的核心問題之一。當采用FSR組網探測時,基于多節點探測可以獲得目標的多角度回波信號,從而獲取多角度的目標參數信息。考慮如何利用多角度回波信號提高參數估計性能,如何借助多角度參數估計信息和多角度側影輪廓像獲得目標的3維輪廓信息,則可以大大提高對隱身目標的識別能力,可為隱身目標的識別提供一種有效的技術手段。
6 結束語
FSR因其特殊的目標衍射效應而受到重視,其探測與成像技術也已由純理論的研究階段逐步開始轉向實驗驗證階段,應用方向也由早期的空中目標探測擴展到了地面及海面目標探測。本文首先介紹了近30年來FSR技術在地面、海面及空中目標的應用現狀與趨勢,并著重討論了FSR的雜波特性與參數估計問題,通過建立新穎的鐘擺物理模型,合理地解釋了前向散射雜波譜寬對風速和波長不敏感這一特殊現象;同時,首次給出了基于北斗導航衛星的前向散射信號提取流程及民航飛機前向散射探測實驗結果;最后,重點討論了前向散射SISAR成像這一新技術,提出了基于非線性時變參數補償的大衍射角SISAR成像新方法,并通過實驗驗證獲取了多種目標的陰影輪廓像,為隱身目標的識別提供了一種重要技術手段。
同時,隨著隱身技術的快速發展,新一代雷達與隱身目標的對抗會愈加劇烈,FSR技術因其優越的反隱身性能而將越來越受到重視。因此,FSR技術與雙多基地雷達體制或組網雷達體制的結合,將彌補前向散射覆蓋區域受限的缺點,充分發揮FSR技術的優勢,進一步完善隱身目標的探測與識別體系,為隱身目標的探測與識別提供新的研究方向和更為廣闊的發展前景。
[1]Skolnik M I.RADAR Handbook[M].2nd Edition.New York:McGraw Hill,1990.
[2]酈能敬.雷達反對抗的新領域-反隱身飛機與對抗反雷達導彈[J].電子學報,1987,15(2):98-104.Li N J.Radar ECCM's new area:anti-stealth and anti-ARM[J].Acta Electronica Sinica,1987,15(2):98-104.
[3]Willis N J.Bistatic Radar[M].Boston,MA:Artech House Inc,1991.
[4]Cherniakov M.Bistatic Radar:Principles and Practice[M].Chichester:John Wiley and Sons Ltd,2007:395-408.
[5]楊振起,張永順,駱永軍.雙/多基地雷達系統[M].北京:國防工業出版社,1998.Yang Z Q,Zhang Y S,and Luo Y J.Bistatic(Multistatic)Radar Systems[M].Beijing:National Defense Industry Press,1998.
[6]Max B and Emil W.Principle of Optics[M].6th Editon.New York:Pergamon Press Inc,1980:375-380.
[7]Li N J.Radar EECMs new area:anti-stealth and anti-ARM[J].IEEE Transactions on Aerospace and Electronic Systems,1995,31(3):1120-1127.
[8]Blyakhman A B and Runova I A.Forward scattering radiolocation bistatic RCS and target detection[C].IEEE International Radar Conference,Waltham,USA,1999:203-208.
[9]Myakinkov A V.Optimal detection of high-velocity targets in forward scattering radar[C].5th International Conference on Antenna Theory and Techniques,Kyiv,Ukraine,2005:345-347.
[10]Myakinkov A V and Ryndyk A G.Space-time processing in three-dimensional forward scattering radar[C].4th International Conference on Antenna Theory and Techniques,Sevastopol,Ukraine,2003:355-358.
[11]Blyakhman A B,Ryndyk A G,and Sidorov S B.Forward scattering radar moving object coordinate measurement[C].IEEE International Radar Conference,Alexandria,VA,USA,2000:678-682.
[12]Koch V and Westphal R.A new approach to a multistatic passive radar sensor for air defense[C].IEEE International Radar Conference,Alexandria,VA,USA,1995:22-28.
[13]Suberviola I,Mayordomo I,and Mendizabal J.Experimental results of air target detection with a GPS forward-scattering radar[J].IEEE Geoscience and Remote Sensing Letters,2012,9(1):47-51.
[14]Antoniou M,Sizov V,Hu C,et al..The concept of a forward scattering micro-sensors radar network for situational awareness[C].2008 IEEE Radar Conference,Rome,Italy,2008:171-176.
[15]Sizov V,Cherniakov M,and Antoniou M.Forward scattering radar power budget analysis for ground targets[J].IET Radar,Sonar & Navigation,2007,1(6):437-446.
[16]Cherniakov M,Abdullah R,Jancovic P,et al..Automatic ground target classification using forward scattering radar[J].IEE Proceedings-Radar,Sonar and Navigation,2006,153(5):427-437.
[17]Abdullah R,Saripan M I,and Cherniakov M.Neural network based for automatic vehicle classification inforward scattering radar[C].IET International Conference on Radar Systems,Edinburgh,UK,2007:1-5.
[18]Marina G,Liam D,Vladimir S,et al..Phenomenology of Doppler forward scatter radar for surface targets observation[J].IET Radar,Sonar & Navigation,2013,7(4):422-432.
[19]Chapurskiy V V.Restoration of images of object from onedimensional radio holograms synthesized at small diffraction angles[J].Radiotekhnika i Elektronika,1988,33(8):1747-1756.
[20]Surikov B S,Khasina E A,and Chapurskiy V V.Correlation and spectral functions of one-dimensional radio holograms synthesized at small diffraction angles[J].Radiotekhnika i Elektronika,1989,34(2):409-419.
[21]Chapurskiy V V and Sablin V N.SISAR:shadow inverse synthetic aperture radiolocation[C].IEEE International Radar Conference,Alexandria,VA,USA,2000:322-328.
[22]Stanislav H,Liam D,and Edward H.Target shadow profile reconstruction in ground-based forward scatter radar[C].IEEE International Radar Conference,Arlington,VA,USA,2015:846-851.
[23]張濤,張群,羅斌鳳,等.基于時頻分析的雙基地前向散射雷達側影成像[J].電子學報,2001,29(6):726-731.Zhang T,Zhang Q,Luo B F,et al..Shadow imaging for bistatic radar based on forward scattering by joint time frequency analysis[J].Acta Electronica Sinica,2001,29(6):726-731.
[24]張濤,羅永健,張群,等.SISAR側影像的校正及特征提取[J].電子與信息學報,2002,24(11):1634-1640.Zhang T,Luo Y J,Zhang Q,et al..Calibration and extraction of features for SISAR shadow image[J].Journal of Electronics & Information Technology,2002,24(11):1634-1640.
[25]羅斌鳳,張冠杰,張守宏.SISAR中運動目標全息信號的表達及仿真研究[J].電子與信息學報,2003,25(10):1315-1320.Luo B F,Zhang G J,and Zhang S H.The expression and simulation of radio hologram signal for the moving object in SISAR[J].Journal of Electronics & Information Technology,2003,25(10):1315-1320.
[26]羅斌鳳,張守宏,張濤,等.SISAR側影輪廓中線相位重構及其識別特征提取[J].電子學報,2004,32(3):368-372.Luo B F,Zhang S H,Zhang T,et al..Shadow profile midline phase reconstruction and its identification features extraction for SISAR[J].Acta Electronica Sinica,2004,32(3):368-372.
[27]曹運合,張濤,羅斌鳳,等.前向散射雷達目標成像實驗研究[J].現代雷達,2009,31(1):18-21.Cao Y H,Zhang T,Luo B F,et al..Experimental imaging results for forward scattering hedge radar[J].Modern Radar,2009,31(1):18-21.
[28]Luo Y,Hu D L,Luo B F,et al..Motion compensation forSISAR based on contrast maximization[C].1st Asian and Pacific Conference on Synthetic Aperture Radar,Huangshan,China,2007:431-434.
[29]Cao Y H,Zhang T,Luo B F,et al..Experimental results for shadow inverse synthetic aperture radar[C].2009 IET Radar Conference,Guilin,China,2009:1-3.
[30]胡程,王力,劉長江.基于GNSS信號的前向散射無源探測系統研究[C].中國電子學會第二十一屆青年學術年會,西安,2015:273-281.Hu C,Wang L,and Liu C J.Forward scatter radar for passive detection based on GNSS signal[C].21st CIE-youth Conference,Xi'an,China,2015:273-281.
[31]Hiatt R E,Siegel K M,and Weil H.Forward scattering of coated objects illuminated by short wavelength radar[J].Proceedings of the IRE,1960,48(9):1630-1635.
[32]Glaser J I.Bistatic RCS of complex objects near forward scatter[J].IEEE Transactions on Aerospace and Electronic Systems,1985,21(1):70-78.
[33]Glaser J I.Some results in the bistatic Radar Cross Section(RCS)of complex objects[J].Proceedings of the IRE,1989,77(5):639-648.
[34]胡程.短基線前向散射雷達系統理論與信號處理方法研究[D].[博士論文],北京理工大學,2009.Hu C.Research on system theory and signal processing method in short baseline forward scattering radar[D].[Ph.D.dissertation],Beijing Institute of Technology,2009.
[35]Hu C,Long T,Zeng T,et al..Physical modeling and spectrum spread analysis of surface clutter in forward scattering radar[J].SCIENCE CHINA Information Sciences,2010,53(11):2310-2322.
[36]Hu C,Long T,and Zeng T.Statistic characteristic analysis of forward scattering surface clutter in bistatic radar[J].SCIENCE CHINA Information Sciences,2010,53(12):2675-2686.
[37]Zhang C F,Liu C J,Hu C,et al..Statistical analysis and simulation method of forward scattering clutter in bistatic radar[C].2013 IET Radar Conference,Xi'an,China,2013:1-6.
[38]胡程,劉長江,曾濤,等.雙基地前向散射雷達雜波分析與模擬方法[J].信號處理,2013,29(3):293-303.Hu C,Liu C J,Zeng T,et al..Statistical analysis and simulation method of forward scattering clutter in bistatic radar[J].Journal of Signal Processing,2013,29(3):293-303.
[39]Hu C,Antoniou M,Cherniakov M,et al..Quasi-optimal signal processing in ground forward scattering radar[C].IEEE Radar Conference,Rome,Italy,2008:1-6.
[40]Long T,Hu C,and Cherniakov M.Ground moving target signal model and power calculation in forward scattering micro radar[J].SCIENCE CHINA Information Sciences,2009,52(9):1704-1714.
[41]Hu C,Li X L,and Cherniakov M.Analysis of signal characteristic and resolution in ground forward scattering radar[C].IEEE International Conference on Signal Processing,Beijing,China,2010:1969-1972.
[42]Hu Cheng,Sizov V,Antoniou M,et al..Optimal signal processing in ground-based forward scatter micro radars[J].IEEE Transactions on Aerospace and Electronic Systems,2012,48(4):3006-3026.
[43]Zeng T,Hu C,Cherniakov M,et al..Joint parameter estimation and Cramer-Raobound analysis in ground-based forward scatter radar[J].EURASIP Journal on Advances in Signal Processing,2012.doi:10.1186/1687-6180-2012-80.
[44]Hu C,Zeng T,Zhou C,et al..Accurate three-dimensional tracking method in bistatic forward scatter radar[J].EURASIP Journal on Advances in Signal Processing,2013.doi:10.1186/1687-6180-2013-66.
[45]Zhou C,Hu C,Liu X R,et al..Analysis of primary parameters estimation with space time processing in forward scatter radar[C].2013 IET Radar Conference,Xi'an,China,2013:1-5.
[46]Liu C J,Hu C,Zhang K,et al..A method for robust track initialization in forward scatter radar[C].2015 IEEE Radar Conference,Arlington,VA,USA,2015:450-454.
[47]Liu C J,Wang L,Wang M Q,et al..Measurement estimation in forward scatter radar with a planar array[C].2015 IET International Radar Conference,Hangzhou,China,2015:1-6.
[48]劉長江,胡程,曾濤,等.一種基于相位補償的前向散射雷達陰影逆合成孔徑快速成像方法[J].電子與信息學報,2015,37(10):2294-2299.Liu C J,Hu C,Zeng T,et al..Fast forward scatter shadow inverse synthetic aperture radar imaging algorithm based on phase compensation[J].Journal of Electronics & Information Technology,2015,37(10):2294-2299.
[49]Zhou C,Zhu C Y,Hu C,et al..Accuracy analysis of SISAR imaging algorithm in forward scatter radar[C].International Conference on Wireless Communication and Signal Processing,Huangshan,China,2012:1-5.
[50]胡程,周超.前向散射陰影逆合成孔徑雷達成像誤差分析[J].電子與信息學報,2013,35(5):1103-1107.Hu C and Zhou C.Analysis of forward scattering shadow inverse synthetic aperture radar imaging algorithm[J].Journal of Electronics & Information Technology,2013,35(5):1103-1107.
[51]Li X L,Hu C,Zhu Y,et al..The imaging research of the ground moving targets in forward scattering radar[C].IEEE International Conference on Signal Processing,Beijing,China,2010:2019-2022.
[52]Zeng T,Li X,Hu C,et al..Investigation on accurate signalmodeling and imaging of the moving target in ground-based forward scatter radar[J].IET Radar,Sonar & Navigation,2011,5(8):862-870.
[53]Liu C J,Hu C,Xu J,et al..Modified signal modeling and imaging method of non-perpendicular crossing targets in forward scatter radar[C].2014 IEEE Radar Conference,Cincinnati,OH,USA,2014:291-295.
[54]Li X L,Hu C,Zeng D Z,et al..Investigation of the SISAR imaging of the ground moving target under multipath interference[C].2011 IEEE Radar Conference,Kansas City,MO,USA,2011:157-161.
[55]Hu C,Li X L,Long T,et al..An accurate SISAR imaging method of groundmoving target in forward scatter radar[J].SCIENCE CHINA Information Sciences,2012,55(10):2269-2280.
[56]陳新亮,胡程,曾濤.一種基于前向散射雷達的車輛目標自動識別方法[J].中國科學:信息科學,2012,42(11):1471-1480.Chen X L,Hu C,and Zeng T.Automatic vehicle classification based on forward scattering radar[J].SCIENTIA SINICA Informationis,2012,42(11):1471-1480.
[57]Zeng D Z,Li X L,and Hu C.Effect of the polarization on SISAR imaging and feature recognition in forward scattering radar[C].IEEE International Geoscience and Remote Sensing Symposium,Honolulu,HI USA,2010:1613-1616.
[58]李曉良,胡程,曾濤.多極化前向散射RCS分析及其對目標分類識別的影響[J].電子與信息學報,2010,32(9):2191-2196.Li X L,Hu C,and Zeng T.The analysis of multipolarization forward scattering RCS and the effect on target classification and identification[J].Journal of Electronics & Information Technology,2010,32(9):2191-2196.
[59]Hu C,Zhou C,Zhu C Y,et al..Forward scatter radar SISAR imaging:theory and primary experimental results analysis[C].14th International Radar Symposium,Dresden,Germany,2013:643-648.
[60]Hu C,Zhou C,Zeng T,et al..Radio holography signal reconstruction and shadow inverse synthetic aperture radar imaging in ground-based forward scatter radar:theory and experimental results[J].IET Radar,Sonar & Navigation,2014,8(8):907-916.

胡 程(1981-),湖南岳陽人,男,教授,博士生導師。任北京理工大學雷達技術研究所副所長,IET Fellow、IEEE Senior Member。主要研究方向包括地球同步軌道SAR、雙基地/前向散射雷達信號處理及昆蟲雷達等。
E-mail:hucheng.bit@gmail.com
劉長江(1990-),山東日照人,男,博士研究生。主要研究方向為前向散射雷達信號處理和昆蟲雷達信號處理。
E-mail:liuchangjiang@bit.edu.cn

曾 濤(1971-),天津人,男,教授,博士生導師。任北京理工大學雷達技術研究所實驗室主任、航空學會電子專業委員會委員。主要研究方向包括SAR成像技術和實時雷達信號處理。
E-mail:zengtao@bit.edu.cn
Bistatic Forward Scattering Radar Detection and Imaging
Hu ChengLiu ChangjiangZeng Tao
(School of Information and Electronics,Beijing Institute of Technology,Beijing 100081,China)
(Beijing Key Laboratory of Embedded Real-time Information Processing Technology,Beijing 100081,China)
Forward Scattering Radar(FSR)is a special type of bistatic radar that can implement image detection,imaging,and identification using the forward scattering signals provided by the moving targets that cross the baseline between the transmitter and receiver.Because the forward scattering effect has a vital significance in increasing the targets' Radar Cross Section(RCS),FSR is quite advantageous for use in counter stealth detection.This paper first introduces the front line technology used in forward scattering RCS,FSR detection,and Shadow Inverse Synthetic Aperture Radar(SISAR)imaging and key problems such as the statistical characteristics of forward scattering clutter,accurate parameter estimation,and multitarget discrimination are then analyzed.Subsequently,the current research progress in FSR detection and SISAR imaging are described in detail,including the theories and experiments.In addition,with reference to the BeiDou navigation satellite,the results of forward scattering experiments in civil aircraft detection are shown.Finally,this paper considers future developments in FSR target detection and imaging and presents a new,promising technique for stealth target detection.
Bistatic radar; Forward Scattering Radar(FSR); Radar Cross Section(RCS); Target detection;Shadow Inverse Synthetic Aperture Radar(SISAR)imaging
TN959
A
2095-283X(2016)03-0229-15
10.12000/JR16058
2016-03-17;改回日期:2016-05-16;網絡出版:2016-06-13
曾濤 zengtao@bit.edu.cn
國家自然科學基金(61120106004,61225005),高等學校學科創新引智計劃(B14010)
Foundation Items:The National Natural Science Foundation of China(61120106004,61225005),The 111 Project of China(B14010)
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中國生殖健康(2019年3期)2019-02-01 06:12:26
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00