基于MATLAB的整體式轉(zhuǎn)向梯形優(yōu)化設(shè)計(jì)
2016-09-19 06:40:54喻超王保華湖北汽車工業(yè)學(xué)院湖北十堰442002
汽車實(shí)用技術(shù) 2016年8期
喻超,王保華(湖北汽車工業(yè)學(xué)院,湖北 十堰 442002)
?
基于MATLAB的整體式轉(zhuǎn)向梯形優(yōu)化設(shè)計(jì)
喻超,王保華
(湖北汽車工業(yè)學(xué)院,湖北 十堰 442002)
以整體式轉(zhuǎn)向梯形機(jī)構(gòu)的平面模型為基礎(chǔ),建立了以實(shí)際外輪轉(zhuǎn)角與理想轉(zhuǎn)角偏差均方根為最小的目標(biāo)函數(shù)。首先根據(jù)圖解法對(duì)整體式轉(zhuǎn)向梯形機(jī)構(gòu)進(jìn)行了初步分析,然后基于MATLAB優(yōu)化工具箱,對(duì)整體式轉(zhuǎn)向梯形機(jī)構(gòu)進(jìn)行優(yōu)化設(shè)計(jì),與圖解分析結(jié)果進(jìn)行對(duì)比,驗(yàn)證了優(yōu)化結(jié)果的正確性。最后基于MATLAB/GUI設(shè)計(jì)了可視化的交互界面,簡(jiǎn)化了整體式轉(zhuǎn)向梯形的優(yōu)化計(jì)算。
整體式轉(zhuǎn)向梯形;優(yōu)化設(shè)計(jì);MATLAB/GUI
10.16638/j.cnki.1671-7988.2016.08.046
CLC NO.: U463.45Document Code: AArticle ID: 1671-7988(2016)08-141-04
為了減小行駛阻力和輪胎磨損,理想的轉(zhuǎn)向傳動(dòng)機(jī)構(gòu)應(yīng)使車輛在轉(zhuǎn)彎過(guò)程中各車輪處于純滾動(dòng)而無(wú)側(cè)滑的狀態(tài),即在設(shè)計(jì)轉(zhuǎn)向梯形時(shí),希望汽車內(nèi)外輪轉(zhuǎn)角完全符合Ackerman轉(zhuǎn)向原理[1],但是由于轉(zhuǎn)向梯形機(jī)構(gòu)自身的限制,其實(shí)際轉(zhuǎn)角與 Ackerman理想轉(zhuǎn)角之間存在一定的偏差。目前對(duì)整體式轉(zhuǎn)向梯形機(jī)構(gòu)的優(yōu)化設(shè)計(jì),大多是建立某一目標(biāo)函數(shù),根據(jù)各種約束條件得到最優(yōu)解[2~4],但求解非線性優(yōu)化問(wèn)題時(shí),優(yōu)化結(jié)果與初始條件及約束條件有關(guān),導(dǎo)致優(yōu)化結(jié)果各異且得不到驗(yàn)證。本文首先根據(jù)圖解法得到某整體式轉(zhuǎn)向梯形機(jī)構(gòu)[5]不同梯形臂長(zhǎng)及梯形底角下的實(shí)際與理論左右轉(zhuǎn)向輪轉(zhuǎn)角關(guān)系曲線,然后提出了一種以實(shí)際外輪轉(zhuǎn)角與理想轉(zhuǎn)角偏差均方根為最小的目標(biāo)函數(shù),通過(guò)對(duì)轉(zhuǎn)向梯形機(jī)構(gòu)的優(yōu)化,使其能夠最大限度的接近理想轉(zhuǎn)向梯形機(jī)構(gòu)。優(yōu)化結(jié)果與圖解結(jié)果進(jìn)行比對(duì),驗(yàn)證了優(yōu)化結(jié)果的正確性,并基于 MAT LAB/GUI,設(shè)計(jì)了可視化交互界面,能夠避免大量的重復(fù)性計(jì)算,直接得到優(yōu)化結(jié)果,對(duì)工程實(shí)際具有一定的借鑒作用。
1、整體式轉(zhuǎn)向梯形機(jī)構(gòu)數(shù)學(xué)建模
1.1理想轉(zhuǎn)角關(guān)系的確定
汽車在轉(zhuǎn)向行駛時(shí),受輪胎側(cè)偏角的影響,轉(zhuǎn)向中心點(diǎn)不在后軸延長(zhǎng)線,而是位于前軸與后軸的某一點(diǎn),由于影響輪胎側(cè)偏角的因素很多,此點(diǎn)位置難以確定。為了便于計(jì)算,忽略車輪定位參數(shù)的影響,假設(shè)車輪為剛性體,且轉(zhuǎn)向梯形機(jī)構(gòu)為平面機(jī)構(gòu)。
假設(shè)左轉(zhuǎn)為正。若要保證全部車輪繞一個(gè)轉(zhuǎn)向中心行駛,則梯形機(jī)構(gòu)應(yīng)保證內(nèi)、外車輪轉(zhuǎn)角滿足(如圖1所示):
其中δi、δo分別為內(nèi)外輪轉(zhuǎn)角,k為兩主銷中心線延長(zhǎng)線到地面交點(diǎn)之間的距離,l為汽車軸距。由式(1)可得同一軸理想的內(nèi)外輪轉(zhuǎn)角關(guān)系為:
1.2整體式轉(zhuǎn)向梯形數(shù)學(xué)建模
轉(zhuǎn)向梯形機(jī)構(gòu)一般分為兩種:整體式轉(zhuǎn)向梯形與斷開(kāi)式轉(zhuǎn)向梯形機(jī)構(gòu),而對(duì)于轉(zhuǎn)向橋采用非獨(dú)立懸架的汽車,一般采用整體式轉(zhuǎn)向梯形。當(dāng)軸距一定時(shí),內(nèi)外輪轉(zhuǎn)角的關(guān)系主要由梯形底角γ及梯形臂長(zhǎng)d的設(shè)計(jì)決定,所以在設(shè)計(jì)時(shí)一般選取這兩個(gè)關(guān)鍵參數(shù)進(jìn)行優(yōu)化。當(dāng)車輪轉(zhuǎn)動(dòng)時(shí),內(nèi)、外車輪轉(zhuǎn)角與梯形底角及梯形臂長(zhǎng)的關(guān)系如圖2所示。
根據(jù)三角函數(shù)關(guān)系
可得同一軸實(shí)際的內(nèi)外車輪轉(zhuǎn)角關(guān)系如下:
2、初步分析
對(duì)于某型號(hào)的汽車,其轉(zhuǎn)向機(jī)構(gòu)的基本參數(shù)如下:k=2030mm,1=5000mm。在設(shè)計(jì)轉(zhuǎn)向梯形機(jī)構(gòu)時(shí),梯形底角γ及梯形臂長(zhǎng)d過(guò)大,將使梯形機(jī)構(gòu)的空間布置困難;γ及d過(guò)小時(shí),轉(zhuǎn)向橫拉桿上的轉(zhuǎn)向力過(guò)大,容易使其發(fā)生變形,影響轉(zhuǎn)向精度。轉(zhuǎn)向梯形機(jī)構(gòu)的優(yōu)化意味著在滿足約束條件的情況下,要使實(shí)際的內(nèi)、外輪轉(zhuǎn)角關(guān)系盡可能的接近阿克曼理論轉(zhuǎn)向。這里假設(shè)滿足阿克曼運(yùn)動(dòng)學(xué)條件就是理想的轉(zhuǎn)向系統(tǒng),那么可以首先通過(guò)圖解法比較所設(shè)計(jì)的轉(zhuǎn)向梯形與理想的轉(zhuǎn)向梯形之間的關(guān)系,來(lái)評(píng)價(jià)設(shè)計(jì)的優(yōu)劣。
通過(guò)對(duì)相同梯形臂長(zhǎng),不同梯形底角的轉(zhuǎn)向梯形機(jī)構(gòu)的分析(如圖3所示), 可以看出:在相同的內(nèi)輪轉(zhuǎn)角下,隨著梯形底角的增大,實(shí)際的內(nèi)外輪轉(zhuǎn)角關(guān)系曲線逐漸偏離Ackerman理想轉(zhuǎn)角關(guān)系。當(dāng)內(nèi)輪轉(zhuǎn)角在 10°范圍以內(nèi)時(shí),曲線重合度較好;當(dāng)內(nèi)轉(zhuǎn)向輪大于10°后,當(dāng)梯形底角γ略大于70°時(shí)曲線與Ackerman理想曲線重合度最好。不同的梯形底角γ對(duì)內(nèi)外輪轉(zhuǎn)角關(guān)系影響較大。
當(dāng)梯形轉(zhuǎn)向機(jī)構(gòu)的梯形底角相同,取不同的梯形臂長(zhǎng)值時(shí)(如圖4所示),可以看出,梯形臂長(zhǎng)對(duì)內(nèi)外輪轉(zhuǎn)向關(guān)系影響較小,但是誤差值Δδo與梯形臂長(zhǎng)成正比變化。
由上圖我們得到如下結(jié)論:梯形底角的變化對(duì)內(nèi)外輪轉(zhuǎn)角之間的關(guān)系有較大影響,梯形臂長(zhǎng)的變化則影響梯形轉(zhuǎn)向機(jī)構(gòu)的空間布置,進(jìn)而影響汽車轉(zhuǎn)向性能的改變。
3、建立目標(biāo)函數(shù)
3.1整體式轉(zhuǎn)向梯形數(shù)學(xué)建模
對(duì)于梯形轉(zhuǎn)向機(jī)構(gòu)的優(yōu)化設(shè)計(jì)問(wèn)題,其實(shí)是一個(gè)小型約束非線性規(guī)劃問(wèn)題,可以通過(guò)調(diào)用 MATLAB(2014a)優(yōu)化工具箱中的fmincon函數(shù)來(lái)求解這個(gè)問(wèn)題。

由于式(6)中的δDO及δAO為連續(xù)變量,對(duì)于所設(shè)計(jì)的梯形轉(zhuǎn)向機(jī)構(gòu)而言,不能明確定義目標(biāo)函數(shù)。因此,可以將式(6)改寫為在轉(zhuǎn)向梯形機(jī)構(gòu)一般工作范圍-30°≤δi≤30°內(nèi)的偏差函數(shù):
通過(guò)對(duì)一系列δi的計(jì)算分析,我們可以得出偏差e的變化趨勢(shì)。如果可以得到e的最小值,那么就可以找到相應(yīng)的最優(yōu)解,另外,也可以通過(guò)分析e的變化趨勢(shì)來(lái)得到尋找最優(yōu)解的方向。
3.2約束條件

其中δmaxo為最大外輪轉(zhuǎn)角。
3.3優(yōu)化結(jié)果分析
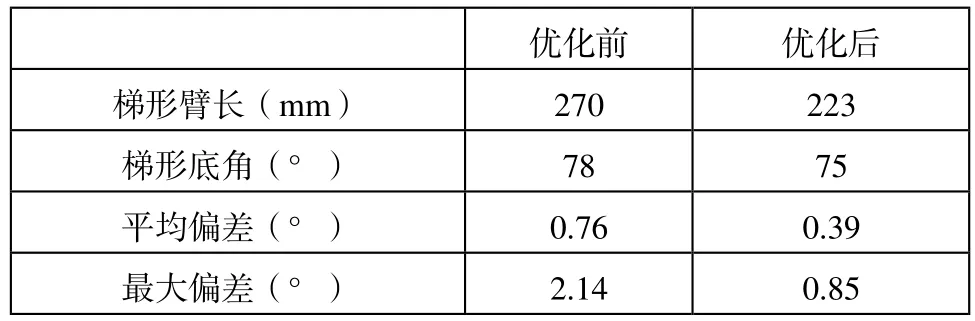
表1 某汽車轉(zhuǎn)向梯形機(jī)構(gòu)優(yōu)化結(jié)果
從表1可以看出,經(jīng)過(guò)目標(biāo)函數(shù)的優(yōu)化,在整個(gè)轉(zhuǎn)向梯形工作范圍內(nèi),實(shí)際的外輪轉(zhuǎn)角與 Ackerman理論外輪轉(zhuǎn)角之間的平均偏差減小了0.4°左右,最大偏差值減小了1.3°。為了防止優(yōu)化后的局部最優(yōu)解,將優(yōu)化值與圖3、圖4的初步分析結(jié)果相對(duì)比,證實(shí)了優(yōu)化結(jié)果與圖解法相吻合,證明了優(yōu)化程序的正確性。優(yōu)化結(jié)果比較理想,可以有效提高轉(zhuǎn)向精度,改善輪胎的磨損。
4、GUI界面設(shè)計(jì)
為了更加直觀便捷地體現(xiàn)實(shí)際的內(nèi)外輪轉(zhuǎn)角與Ackerman理論轉(zhuǎn)角之間的變化關(guān)系以及優(yōu)化效果,基于MATLAB/GUI,設(shè)計(jì)了一個(gè)可視化的交互界面。GUI是指由窗口、菜單、按鍵、光標(biāo)、圖標(biāo)、對(duì)話框及文本框等各種圖形對(duì)象組成的用戶界面,它讓用戶定制用戶與MATLAB的交互方式。在此界面下,用戶通過(guò)輸入汽車基本參數(shù)如兩主銷中心距、汽車軸距以及允許的最大內(nèi)輪轉(zhuǎn)角,以及待優(yōu)化的轉(zhuǎn)向梯形機(jī)構(gòu)梯形底角及梯形臂長(zhǎng)的初始值,通過(guò)點(diǎn)擊優(yōu)化按鈕可以直接得到優(yōu)化后的結(jié)果,并可以輸出優(yōu)化前后內(nèi)外輪轉(zhuǎn)角與 Ackerman理論值之間的關(guān)系曲線以及優(yōu)化后的外輪偏差曲線,如圖5所示。
5、結(jié)語(yǔ)
本文通過(guò)對(duì)某汽車轉(zhuǎn)向梯形機(jī)構(gòu)的初步圖解分析,以及MATLAB優(yōu)化工具箱進(jìn)行優(yōu)化,得到了能夠最大程度接近Ackerman理想轉(zhuǎn)角關(guān)系的轉(zhuǎn)向梯形機(jī)構(gòu),兩者相互印證,保證了優(yōu)化結(jié)果的正確性。并基于MATLAB/GUI,設(shè)計(jì)了人機(jī)交互的可視化界面,通過(guò)簡(jiǎn)單的參數(shù)輸入,即可得到最優(yōu)值,且能直觀地了解實(shí)際梯形轉(zhuǎn)向機(jī)構(gòu)的內(nèi)外輪轉(zhuǎn)角與理想轉(zhuǎn)角之間的關(guān)系,對(duì)工程實(shí)踐具有一定的指導(dǎo)作用。
[1]Simionescu,P.A,Beale,D.Optimum synthesis of the four-bar generator in its symmetric embodiment:the Ackermann steering linkage[J].Mechanism and Machine Theory,2002,37(12):1487-1504.
[2]劉旋,李騰飛,鄭帥廣.汽車整體式轉(zhuǎn)向梯形機(jī)構(gòu)優(yōu)化設(shè)計(jì)[J].汽車實(shí)用技術(shù),2014,3:28-30.
[3]王計(jì)廣,邢號(hào)彬,常秀巖,等.基于MATLAB優(yōu)化工具箱的整體式轉(zhuǎn)向梯形優(yōu)化設(shè)計(jì)[J].汽車零部件,2010,10:60-62.
[4]何正強(qiáng),石凱凱.整體式轉(zhuǎn)向梯形機(jī)構(gòu)的優(yōu)化設(shè)計(jì)[J].現(xiàn)代機(jī)械,2012,2:33-35.
[5]Reza N.Jazar.Vehicle dynamics:theory and application[M].Phoenix Lieb press,2008.
[6]羅永革,馮櫻.汽車設(shè)計(jì)[M].北京:機(jī)械工業(yè)出版社,2011.
Optimization Design Based on MATLAB for Integral Steering Trapezoidal Mechanism
Yu Chao,Wang Baohua
(Hubei University of Automotive Technology,Hubei Shiyan 442002)
Based on the plane model of integral steering trapezoidal mechanism,an optimum math model of objective functions which is minimum error of root mean square between practical and ideal outer corner angle was established.Firstly,according to the graphic method,the integral steering mechanism was analyzed,and based on the MATLAB optimization design of the integral steering trapezoid mechanism was carried out to verify the correctness of the optimization results.Finally,the interactive interface was designed based on MATLAB/GUI,which simplifies the optimization calculation.
integral steering trapezoidal mechanism; optimization design; MATLAB/GUI
U463.45
A
1671-7988(2016)08-141-04
喻超(1991-),男,碩士研究生,就讀于湖北汽車工業(yè)學(xué)院,從事傳動(dòng)與控制方面的研究。
湖北省自然科學(xué)基金(2015BAA046)。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
兒童時(shí)代·快樂(lè)苗苗(2017年7期)2018-01-24 18:28:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
作文大王·低年級(jí)(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
