山貓(Lynx)車載激光移動測量系統精度分析
2016-09-16 06:06:44周振明唐秋祥
城市勘測 2016年4期
關鍵詞:測量
周振明,唐秋祥
(湖南省第一測繪院,湖南衡陽 421001)
山貓(Lynx)車載激光移動測量系統精度分析
周振明*,唐秋祥
(湖南省第一測繪院,湖南衡陽 421001)
利用山貓(Lynx)車載激光移動測量系統采集了5條實驗路段的激光點云數據,通過數據聯合解算,采用不同間距的檢校點糾正方案,得出了有益的結論:車載激光移動測量系統沿帶狀線路進行測量時,對沿線GPS基站的要求較高,數據采集位置距基站的平均距離不應大于系統的標稱值,超過標稱基站距離的激光點云高程精度將大幅下降。要提高激光點云的位置精度,可布設檢校點對激光點云進行糾正,應根據不同的成圖精度選擇不同間距的檢校點布設方案。
車載激光移動測量系統;移動測量、激光點云;檢校點糾正
1 引 言
車載激光移動測量系統(MMS)將全球導航定位系統(GNSS)、慣性測量單元(IMU)、激光掃描儀(Li-DAR)、工業相機(CCD)、距離編碼器(DMI)等集成在車載平臺上,沿車行路徑快速采集多源空間地理信息數據,經后期數據解算和處理,可以獲得高精度的三維激光點云和影像數據成果[1,2]。
由于全球導航定位系統、慣性測量單元、距離編碼器受不同時段、不同天氣、不同區域、信號遮擋等多種因素干擾,加上激光掃描距離、基站設置距離以及檢校點間距等不同,最終影響到激光點云的空間位置精度。隨著移動測量技術的日益發展和普及,許多學者對移動測量的精度狀況從多角度進行了研究,李峰用地面控制點來提高車載點云精度,取得了一定效果,但實驗數據僅200 m,結果不具普遍性[3];徐工等研究了車速、掃描距離對移動點云精度的具體影響尺度[4];程效軍等研究了點云配準的誤差傳播規律[5]。然而,針對移動測量進行大規模點云精度實驗研究尚不多。為了研究不利環境和實際野外作業工況下車載激光移動測量系統激光點云的精度狀況,本次實驗利用加拿大 Optech公司的山貓(Lynx)車載激光移動測量系統,選取了湖南省內滬昆高速(中方-玉屏)段、包茂高速(中方-吉首)段、溆懷高速等進行長距離移動測量精度測試,獲取大數據量的激光點云與對應的影像數據。此高速路段涵蓋了山區GPS信號微弱、失鎖、隧道密集等各種對定位精度不利的因素,具有野外環境的代表性。
2 野外數據采集
根據計劃,項目組分兩次先后采集了選定路線的激光點云數據,具體線路情況如表1所示。

各實驗線路情況表 表1
可以看出,數據采集時間覆蓋了9:00~21:00,基本包含了測繪正常生產作業時段,可較好的反應不同時間段環境對定位精度的影響。
野外數據采集方案:
(1)制訂計劃。掃描車作業前,經過檢校場檢校,設備狀況良好。先規劃好作業范圍和掃描車行駛路徑,將作業圖導入至隨機軟件Lynx Survey并繪制路徑,方便導航作業范圍。
(2)GPS基站數據采集。掃描車作業前,提前30 min以上架設基站。
(3)激光點數據采集。掃描車按計劃開始作業,掃描結束后,掃描車靜止,車載POS需做5 min以上的靜態。靜態結束后,從車載激光系統的存儲器中,將車載POS數據拷貝至計算機。
(4)掃描作業結束后,基站繼續接收GPS信號至少30 min。
(5)為了提高激光點云空間精度,同期還安排技術人員采集檢校點三維坐標。
外業采集獲取的數據包括:*.range格式的原始激光點數據、車載GPS實時測量的軌跡數據、GPS基站數據、距離編碼器數據、影像數據和檢校點坐標等。
3 數據后處理
3.1數據聯合解算
使用隨機軟件對采集的數據進行聯合解算。
(1)解壓數據:從作業硬盤里,解壓出原始的激光點數據。
(2)處理POS數據;使用POSPac MMS軟件加載車載POS數據和GPS基站數據,解算出高精度的車載軌跡線。
(3)數據整合:使用DASHMap處理整合數據,加載原始激光點數據、解算后POS數據、檢校參數,輸出las格式的激光點云數據。
由于受外部環境因素影響較大,聯合解算的激光點云空間精度不高,要提高其空間精度,必須利用高精度的檢校點對激光點云進行糾正處理。
3.2激光點云糾正
選擇不同密度的檢校點方案,測試糾正后激光點云的空間位置精度。
主要步驟包括:激光點云數據分塊,分塊導入激光點數據,導入解算后的軌跡線數據,軌跡線分段,匹配對應軌跡線編號,導入外業檢校點,人工匹配,計算系統方向改正值,修正軌跡線,輸出糾正后激光點數據等。
4 精度分析
4.1觀測參數
各實驗路段觀測參數情況如表2所示。
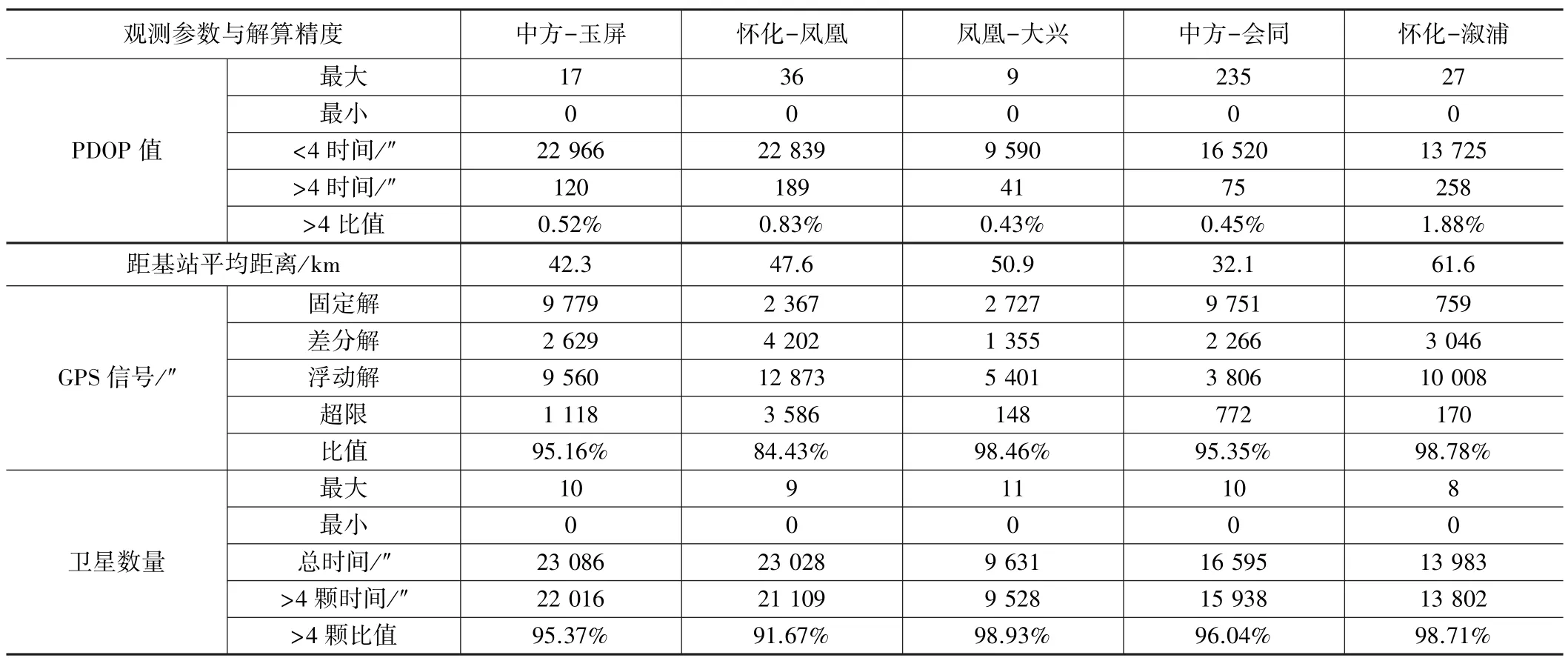
各實驗路段觀測參數情況 表2
4.2糾正前激光點云精度統計
以滿足1∶5 000、1∶10 000地形圖精度為前提,按照文獻[6]中1∶5 000、1∶10 000地形圖精度指標進行統計。考慮測量方式的不同,地形類別認定為丘陵地區,地物點平面位置中誤差應優于圖上0.5 mm(為便于統計,誤差均采用省略正負號表示,下同),高程中誤差應優于1.2 m[6],超過兩倍中誤差視為粗差。統計糾正前各實驗路段激光點云精度如表3所示。
從表3可知,5條實驗路段的平面精度均滿足1∶10 000比例尺精度要求,但只有1條路段高程精度滿足規范要求。分析實驗路段觀測外部環境因素及解算精度情況,距基站平均距離均大于系統所要求的30 km(標稱距離),最遠達到60余千米,而中方-會同路段距基站平均距離最短,為32.1 km,平面和高程精度最高,甚至滿足1∶500地形圖精度要求(平面中誤差優于0.3 m,高程中誤差優于 0.4 m),當野外GPS信號影響相差不大時,我們認為距基站平均距離為影響成果精度的主要原因。
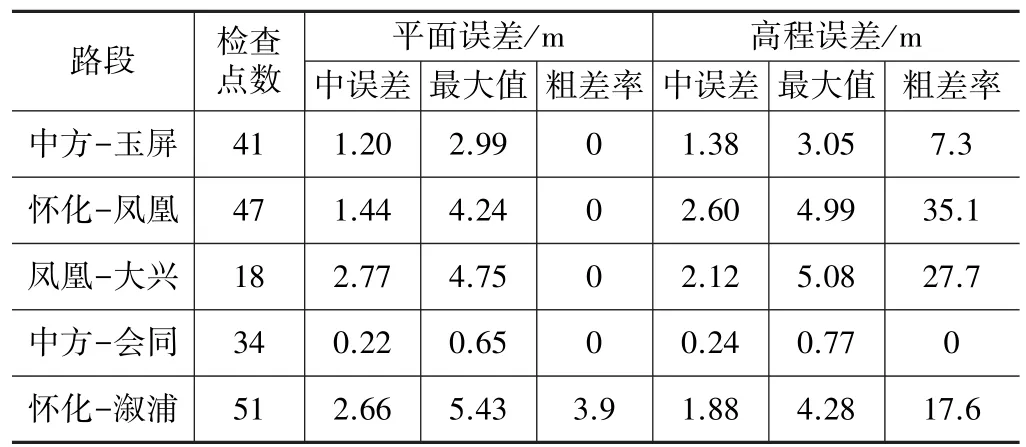
各實驗路段解算精度統計 表3
4.3糾正后激光點云精度統計
采用平均間距為1.5 km的檢校點對各實驗路段激光點云進行糾正,按照文獻[7]中 1∶1 000、1∶2 000地形圖精度指標進行統計,丘陵地區地物點平面中誤差應優于圖上 0.6 mm,高程中誤差應優于0.5 m[7],超過兩倍中誤差視為粗差,統計結果如表4所示。
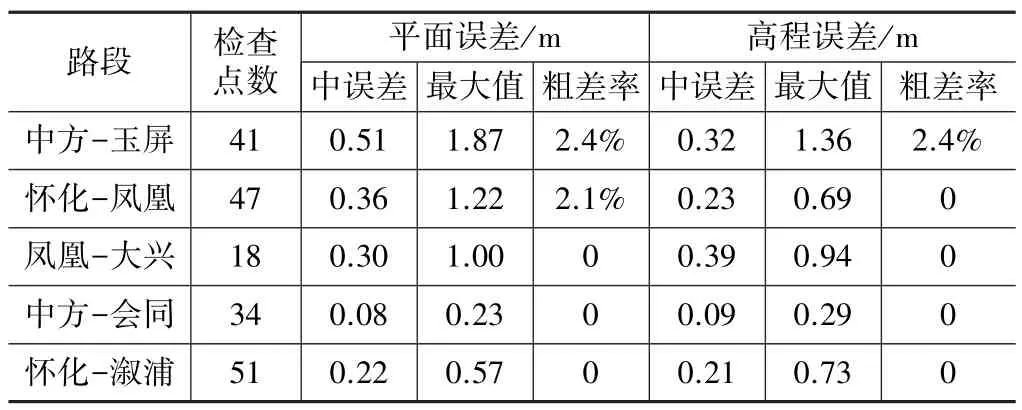
檢校點間距為1.5 km時各實驗路段激光點云精度統計 表4
可見,在檢校點間距為1.5 km的情況下,激光點云精度能完全滿足1∶1 000DLG的精度要求,且粗差率較低。
為檢驗不同間距的檢校點對激光點云糾正精度的影響,項目組對懷化-鳳凰路段分別采用 5 km和10 km間距的檢校點對激光點云進行糾正,按1∶5 000、1∶10 000地形圖精度指標進行統計,結果如表5所示。
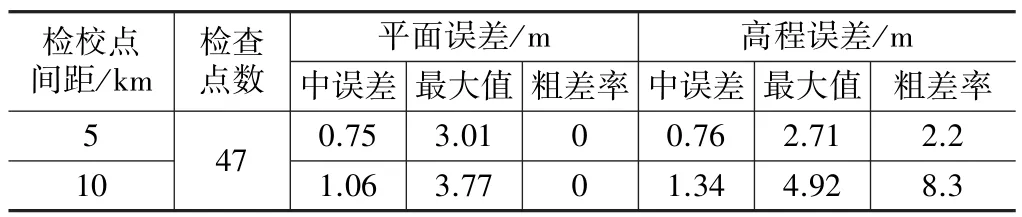
懷化-鳳凰路段不同檢校點間距糾正后激光點云精度統計 表5
采用5 km間距的檢校點進行糾正,激光點云精度能夠滿足1∶5 000地形圖精度指標;采用10 km間距的檢校點進行糾正,激光點云精度滿足不了1∶10 000地形圖精度指標,主要是高程精度超限。
5 結 論
車載激光移動測量系統因沿帶狀線路進行測量,對沿線GPS基站的要求較高,數據采集位置距基站的平均距離不應大于系統要求的30 km,超過 30 km后的激光點云高程精度將大幅下降。如需提高激光點云位置精度,應布設檢校點對其進行校正,可根據不同的成圖精度選擇不同間距的檢校點布設方案。實驗證明,檢校點間距對激光點云高程精度的影響要大于對平面精度的影響。要滿足1∶1 000、1∶2 000地形圖精度,宜布設間距為 1.5 km左右的檢校點;要滿足1∶5 000、1∶10 000地形圖精度,宜布設間距為5 km左右的檢校點。
[1]李德仁.移動測量技術及其應用[J].地理信息空間,2006,4(4):1~5.
[2]宋楊.基于RIEGL VZ-400及Ladybug3全景相機的移動激光測量系統的研制及應用[J].城市勘測,2014(2):91~95.
[3]李峰,余志偉,董前林等.車載激光點云數據精度的提高方法[J].科技情報開發與經濟,2011,21(9):123~124.
[4]徐工,程效軍.移動測量系統點云精度評定及應用分析[J].工程勘察,2013,4(9):42~46.
[5]程效軍,施貴剛,王峰等.點云配準誤差傳播規律的研究[J].同濟大學學報·自然科學版,2009,37(12):1668~1672.
[6]CH/T 1011-2005.1∶5000 1∶10000地形圖航空攝影測量內業規范數字線劃圖[S].
[7]CH/T 9008.1-2010.基礎地理信息數字成果1∶500 1∶1000 1∶2000數字線劃圖[S].
Accuracy Analysis of Lynx Mobile Laser Scanning Measurement System
Zhou Zhenming,Tang Qiuxiang
(The first surveying and mapping institute of Hunan Province,Hengyang 421001,China)
In this paper,we collect LiDAR(Light Detection and Ranging)datasets from five test roads using Lynx mobile laser scanning measurement system.By joint solution and correction between check points with different interval,we get promising results for peers to reference.Firstly,the measurement results given by mobile laser scanning measurement system strongly depend on the GPS(Global Position System)base stations all along.Secondly,the average distance between the base station and the data collection points should not be more than the system calibration values,or the measured height precision will decrease to a large extent.Finally,the position accuracies of LiDAR point clouds can be increased by setting check points to correct the point clouds.In addition,different check points setting approaches should be chosen according to different mapping precision.
mobile laser scanning measurement system;mobile measurement;LiDAR point cloud;check point correction
1672-8262(2016)04-65-03
P234.4
A
2016—03—09
周振明(1964—),男,高級工程師,注冊測繪師,主要從事測繪技術工作。
國家自然科學基金項目(41574006)
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
