駕駛過程中離合操縱的數據處理方法
2016-09-13 06:09:50劉峻巖張進秋韓朝帥
裝甲兵工程學院學報 2016年4期
劉峻巖, 彭 虎, 張進秋, 高 恒, 韓朝帥
(1. 裝甲兵工程學院裝備試用與培訓大隊, 北京 100072; 2. 裝甲兵工程學院技術保障工程系, 北京 100072;3. 南京炮兵學院自行火炮教研室, 江蘇 南京 211132; 4. 63960部隊, 北京 102205)
?
駕駛過程中離合操縱的數據處理方法
劉峻巖1, 彭虎2, 張進秋1, 高恒3, 韓朝帥4
(1. 裝甲兵工程學院裝備試用與培訓大隊, 北京 100072; 2. 裝甲兵工程學院技術保障工程系, 北京 100072;3. 南京炮兵學院自行火炮教研室, 江蘇 南京 211132; 4. 63960部隊, 北京 102205)
為解決坦克裝甲車輛駕駛過程的數據處理及應用等問題,以某次駕駛過程中單次完整的離合操縱位移數據為例,提出了去“突變”值、平滑處理及折點判定的3步數據處理方法,并對設定的操縱速度、持續時間等指標進行了判定。結果表明:該數據處理方法能有效處理原始數據、識別離合操縱的各個折點,通過計算機判定各個指標的結果正確且有效,為駕駛評判提供了參考。
坦克裝甲車輛; 駕駛; 離合操縱; 平滑處理
駕駛技能評判作為駕駛訓練及考評駕駛員技術水平的方式,對糾正駕駛過程中存在的問題及提高駕駛訓練效率具有重要作用。但傳統的評判采取教練員評分的方式,主觀性強且難以發現駕駛員操縱存在的問題。因此,為適應軍事訓練轉型,實現駕駛的數字化評估具有重要意義。通過在車內安裝傳感器采集駕駛操縱及車輛狀態數據,利用數據來糾正駕駛過程中的錯誤操縱動作及判定駕駛員操縱水平,是駕駛訓練邁向信息化的趨勢。但實車直接采集的數據受噪聲干擾,誤差較大,不能直接應用,此外還需判定操縱起止點等指標,因此需要進行數據處理[1-2]。基于此,筆者在某次駕駛過程中單次完整的離合操縱位移數據的基礎上提出數據處理方法,并對設定的指標進行判定,以期為駕駛評判提供參考。
1 離合操縱過程
由文獻[3]可知:單次離合操縱可分為踏下、松開離合器踏板2個過程,其中松開離合器踏板時前2/3平穩,用于控制松開的速度和時機,后1/3可快松。按照上述操縱過程,離合器松開時可得到6個轉折點,分為5個階段,單次完整的離合操縱如圖1所示。
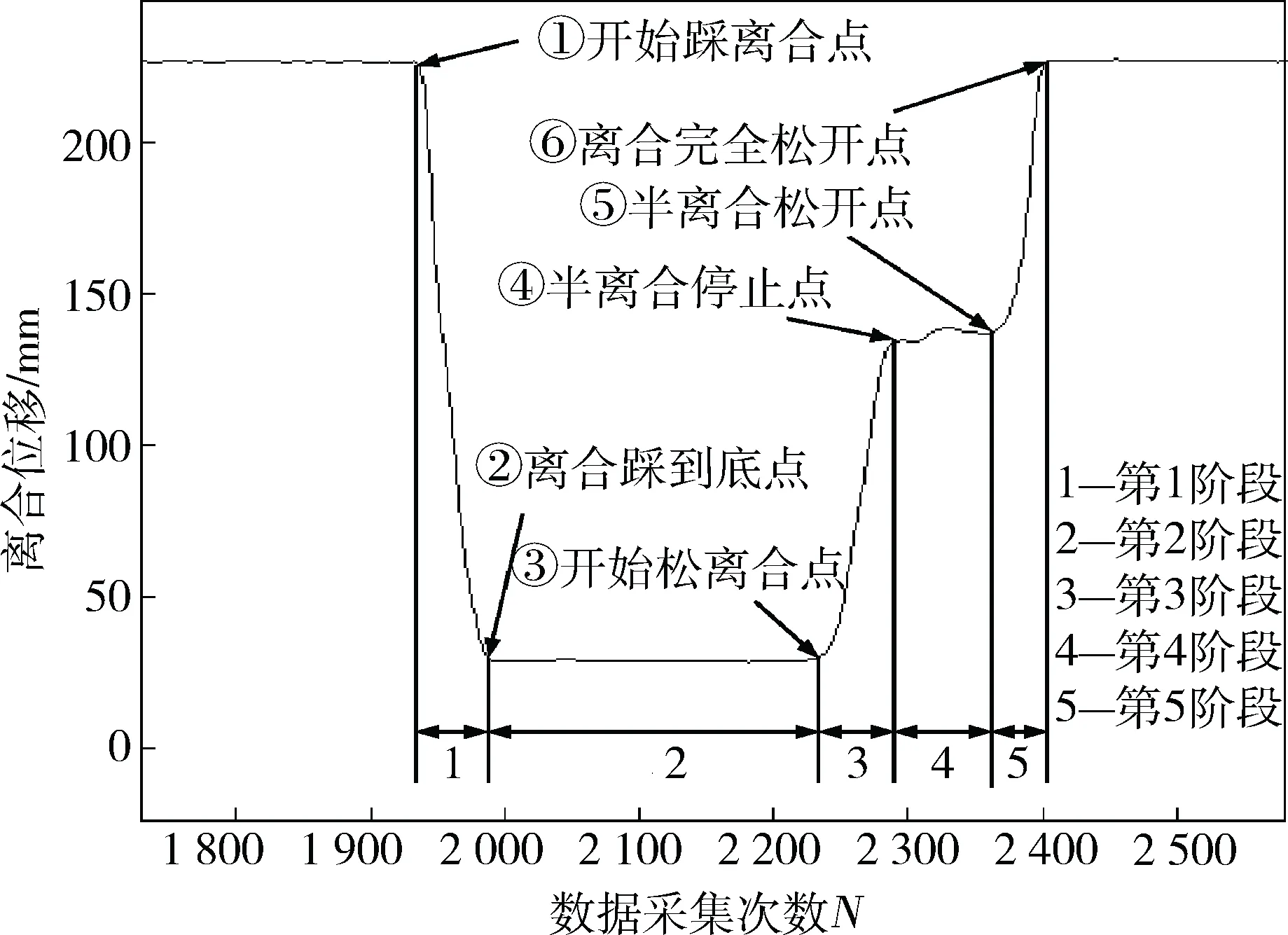
圖1 單次完整的離合操縱示意圖
假設駕駛員每次完整的離合操縱均符合該過程,則通過MATLAB編程尋找到這6個轉折點,進而確定踏下及松開離合器踏板的時機,即離合各階段操縱速度、持續時間等,判定駕駛員是否按照操縱規程和要領操縱離合器踏板。
2 設定指標
根據其操縱特點及評判需求,提出5個階段各自的持續時間ti(i=1,2,…,5)、整個離合操縱持續時間ttotal、各階段的操縱速度vi、松離合時半離合點位移及操縱正確性4類指標[4]。
采用拉線式位移傳感器離合操縱位移進行測量,其范圍為0~200 mm,初始傳感器位移為30 mm,離合踩到底時最大位移為230 mm,半離合點的位置在130~170 mm之間,即占總行程的50%~70%。各指標的計算方法如下:設數據采集次數為Ni,然后利用
ti=Ni/f
(1)
計算持續時間,其中f為數據采集頻率;通過
vi=si/ti
(2)
計算操縱速度的平均速度,其中si為變化的位移;持續總時間為
(3)
受各階段影響較大,ttotal范圍較寬,在1.3~8.4 s之間,駕駛員操縱越熟練,ttotal越小,以此作為評價駕駛技能的指標。單次離合操縱各指標值如表1所示。

表1 單次離合操縱各指標值
3 數據處理過程
由于部分路況顛簸產生的干擾噪聲會對實際采集的數據產生波動影響,因此需要進行數據處理,流程如圖2所示。首先,對原始數據進行去“突變”值(非正常操縱引起的變化較大且不符合規律的數據)處理,以降低非正常操縱引起的數據變化及波動,提高數據可用性;其次,對其進行平滑處理,以改善數據的可讀取性,避免由于“突變”值的硬性去除而使得程序在讀取過程中陷入“死區”;再次,判定各個折點,用以對各指標進行定量計算及分析;最后,計算及判定各個指標的值[5-6]。以某次駕駛過程中的一次完整離合操縱數據為例,對其處理過程進行分析。
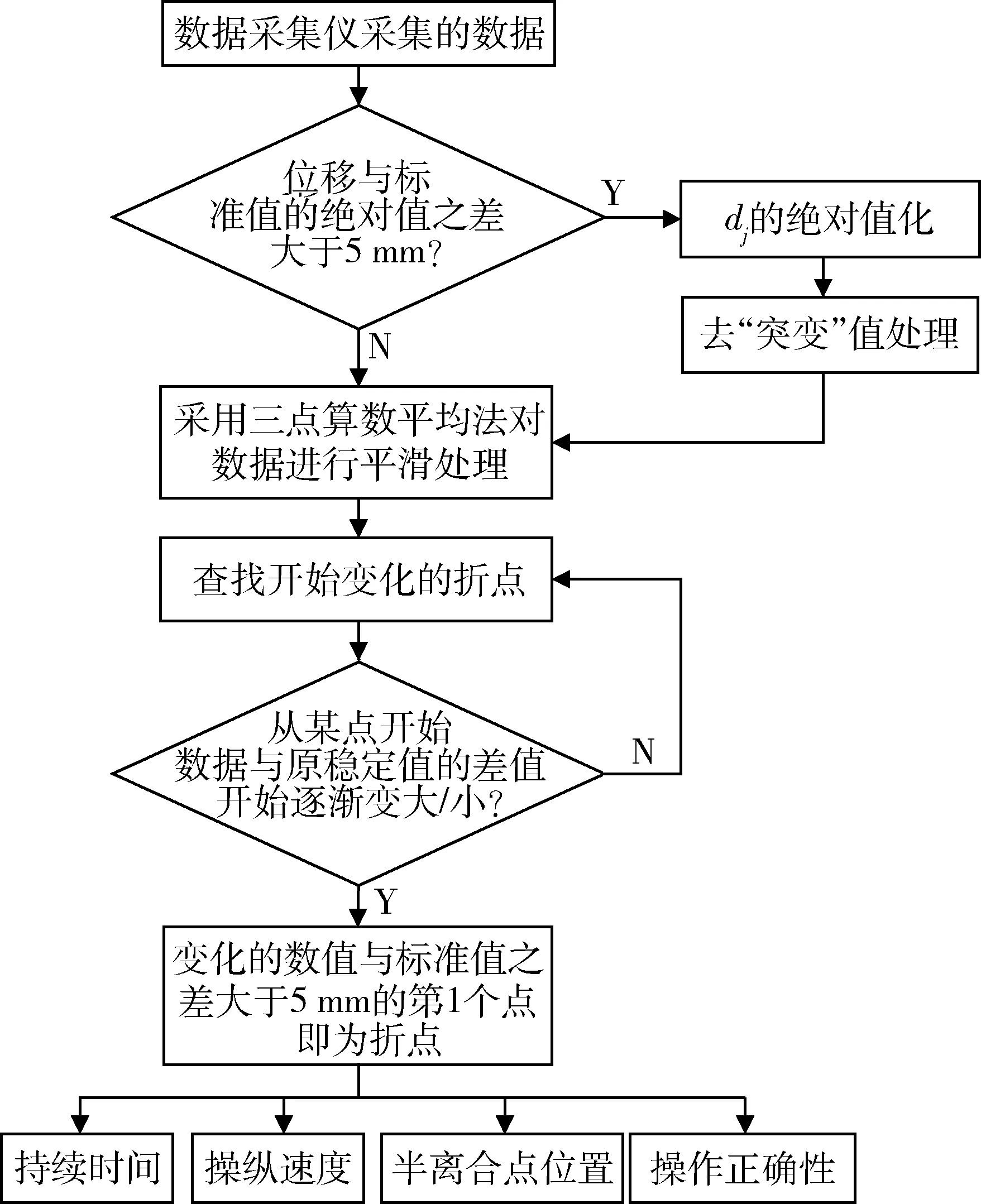
圖2 數據處理流程
3.1去“突變”值處理
經多次編程測試,結合離合操縱特點及駕駛經驗,確定“突變”值的閾值λ=5 mm。去“突變”值處理過程包含以下2個階段:
1)位移差值dj的比較。

(4)
式中:x為標準位移;xj為測量位移;N>5。
車輛行駛過程中,由于本身的振動或者路面不平引起的顛振會導致離合器縱拉桿位移圍繞原始位移來回波動,每一次數據采集的點都會記錄對應縱拉桿位移值。與標準位移相比,波動會使位移偏高或偏低,為了在逐點比較過程中排除符號對處理結果的影響,第1步進行絕對值差值計算。
2)“突變”位移點的處理。
(5)
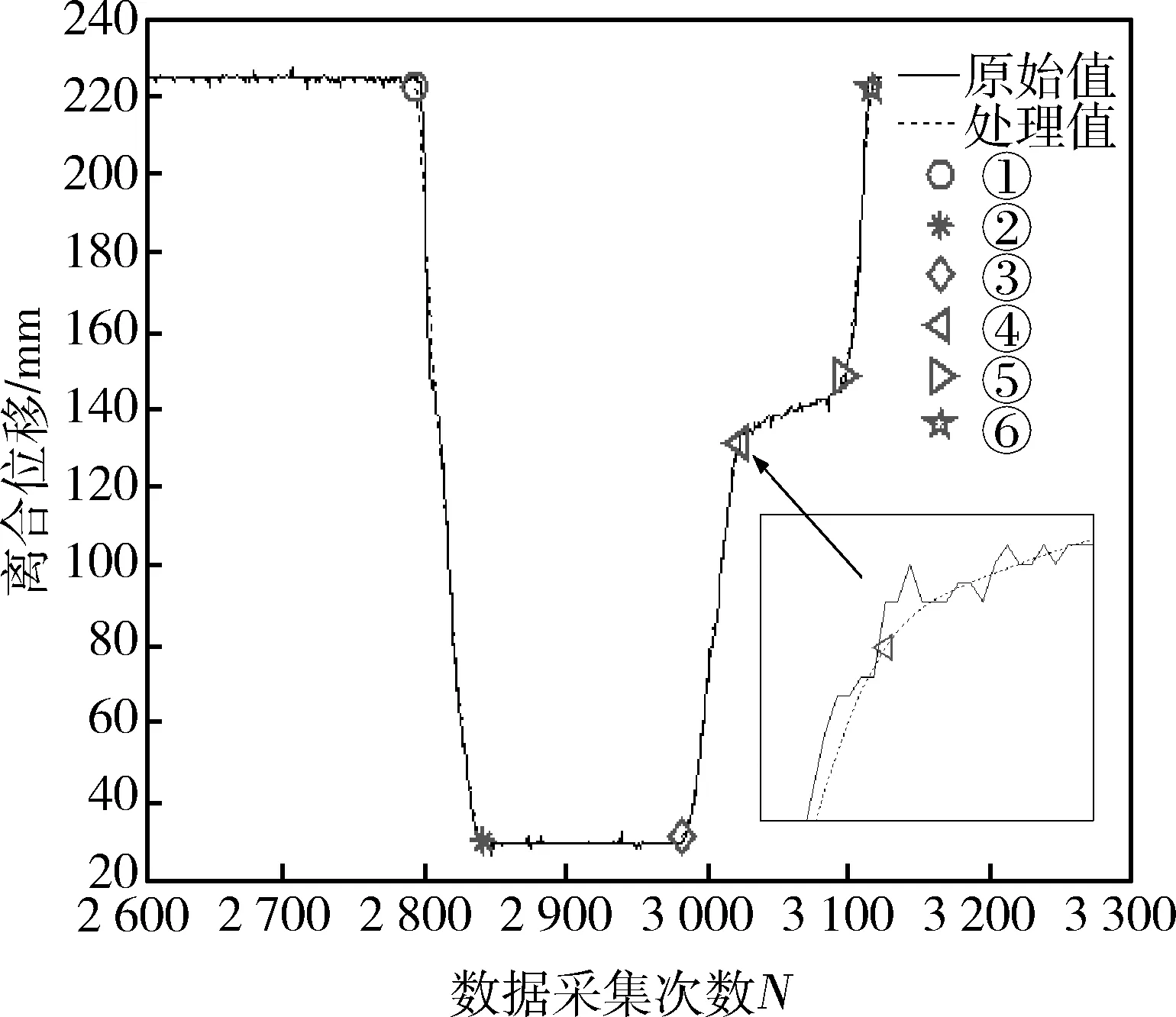
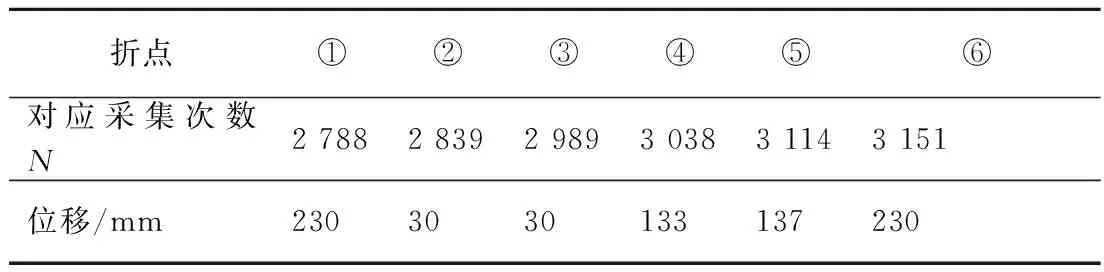
當dj>λ,且向前、后推5個點的值(dj±5)均比閾值小時,則認為這個點是“突變”點,若xj>x則將該點的值用上限值x+λ取代,若xj 圖3 原始曲線與去“突變”值處理后曲線對比 3.2平滑處理 正常的離合器操縱應當是一組連續變化的過程,經上一步處理后“突變”值位置與其余數據不能平滑過渡,采用三點算術平均法進行多次平滑處理,得到可判定和應用的新數據曲線[4]。本例中的離合原始數據如表2所示。 采用三點算術平均法進行處理:x1=x1,x2=(x1+x2+x3)/3,x3=(x2+x3+x4)/3,…,xN-1=(xN-2+xN-1+xN)/3,xN=xN。其結果如表3所示。其中:x1和xN不變,中間數據都要經過處理,且平滑處理不少于20次才能達到指標判定的要求。經試算,當進行到第24次時,精度能滿足要求,其結果如圖4所示。 表2 離合原始數據 表3 三點算術平均法處理結果 3.3折點判定 程序按時間軸順序依次讀取數據,查找從某點開始數據逐漸變大/變小的點,若存在這樣的不可逆趨勢,則計算每個數據與對應的穩定值之差,差值大于5 mm的第1個點即為折點,其結果如圖4所示。 圖4 平滑處理及折點判定結果 3.4指標值計算及判斷 根據指標值統計計算方法對各指標結果進行判定。圖4中的原始值為經去“突變”值處理后的數據,而處理值為經三點算術平均法平滑處理后得到的數據,其中的6個折點分別用不同的符號表示。從圖4中可以看出:經過平滑處理,數據曲線變得光滑且易讀取,6個折點也能準確地定位,滿足了平滑處理及折點判定的要求。根據圖4確定各個折點的位置坐標,如表4所示。 表4 各個折點的位置坐標 數據采集頻率設置為100 Hz,根據式(1)-(3)判定得出的各指標值如表5所示。 表5 判定得出的各指標值 從表5中可以得出如下結論: 1)操縱速度。按照要求,離合操縱應該符合“快—慢—快”的操縱特點,分別對應表中1、3、5三個階段,表中0.392>0.21,0.21<0.251,即表示此次離合操縱符合離合操縱要求。 2)持續時間。通過與表1的對比,各個階段的持續時間基本與標準值相吻合。由于駕駛員操縱的熟練程度、車輛的性能狀況以及對應的路況條件對離合操縱時間影響較大,因此不能準確地通過限定時間來評價其操縱的好壞。但離合操縱規律是不變的,由于ttotal=2.63 s,在1.3~8.4 s范圍內,因此本次操縱符合離合操縱規律。 3)正確性。t4=0.76 s>0 s,說明此次操縱存在半離合點,駕駛員按照松離合要領將此過程前后分割開,符合駕駛要求,表明其操縱正確。 4)半離合點。半離合點位置與初始位置之間的位移分別為103、107 mm,總行程為200 mm,分別占總行程的51.5%和53.5%,在規定的50%~70%范圍之內,說明半離合點位置正確;但百分比的值偏低,說明駕駛員平穩松離合過程結束稍早,應該適當延長平穩松離合的階段。 綜上,此次操縱符合離合操縱規律及要求,為一次完整且正確的操縱過程,這表明:通過數據處理不僅能夠排除“突變”值的影響,清晰地判定各個折點以及統計分析各個指標的值,還可以標志離合操縱的正確性以及通過持續總時間判定駕駛員操縱水平,說明該數據處理方法是有效的。 [1]石志濤. 裝甲車輛基礎駕駛動作識別與技能評價研究[D].北京:裝甲兵工程學院,2012. [2]Osgouei R H, Lee H, Choi S. Comparative Evaluation of Performance Measures for Human Driving Skills[J]. Intel Serv Robotics, 2013, 6: 169-180. [3]羅劍. 裝甲車輛駕駛技能評判研究[D].北京:裝甲兵工程學院,2011. [4]荊強,羅劍,高永強,等. 基于駕駛員行為特性的駕駛技能評價指標研究[J]. 汽車工程學報, 2011, 1(2): 153-158. [5]劉義樂,劉峻巖,畢占東. 基于操縱件狀態時序變化的車輛換擋動作識別方法[J]. 裝甲兵工程學院學報,2011, 25(1):45-48. [6]張進秋,岳杰,石志濤,等. 基于矩陣變換的坦克駕駛訓練數字化記錄與評判系統研究[J]. 裝甲兵工程學院學報, 2012, 26(6): 30-34. (責任編輯: 尚菲菲) Data Processing Method of Clutch Manipulation in Driving Process LIU Jun-yan1, PENG Hu2, ZHANG Jin-qiu1, GAO Heng3, HAN Chao-shuai4 (1. Brigade of Equipment Trail and Training, Academy of Armored Force Engineering, Beijing 100072, China;2. Department of Technical Support Engineering, Academy of Armored Force Engineering, Beijing 100072, China;3. Teaching and Research Section of Self-propelled Artillery, Academy of Nanjing Artillery, Nanjing 211132, China;4. Troop No. 63960 of PLA, Beijing 102205, China) In order to solve the problem of data processing and application in driving process of tank and armored vehicles, taking the clutch manipulation data in driving process for example, the three steps data processing method of wiping off false value, smooth treatment and judging transition point are put forward, through the comparison between a full clutch manipulation process and setting clutch manipulation index of manipulation velocity and lasting time according to the driving manual. The result indicates that the method can manipulate original data effectively, distinguish those transition points of clutch manipulation, the judged result of every index through computer is correct and effective, which provides reference for driving evaluation. tank and armored vehicles; driving; clutch manipulation; smooth process 1672-1497(2016)04-0053-04 2016-05-02 劉峻巖(1975-),男,講師,碩士。 E923.1 A 10.3969/j.issn.1672-1497.2016.04.010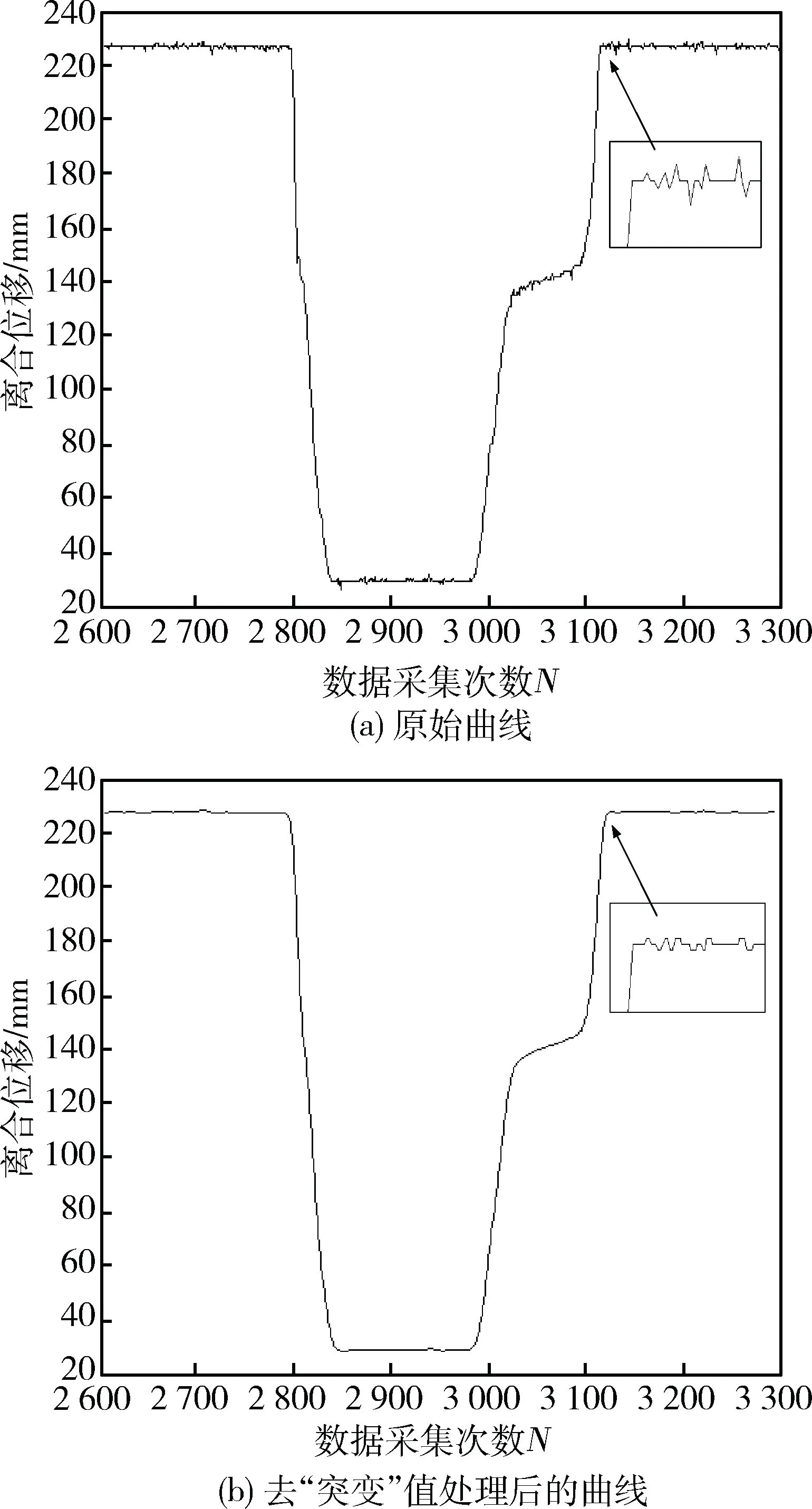



猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
心理學報(2022年4期)2022-04-12 07:38:02
汽車實用技術(2022年4期)2022-03-07 06:07:20
水泵技術(2021年3期)2021-08-14 02:09:20
汽車電器(2018年1期)2018-06-05 01:22:54
公民與法治(2016年4期)2016-05-17 04:09:26
當代化工研究(2016年9期)2016-03-20 16:22:13
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:22
測繪科學與工程(2013年3期)2013-03-11 15:07:36
