基于全局特征與局部特征的圖像分級匹配算法研究及應(yīng)用
2016-09-08 06:57:43朱奇光王梓巍
中國機械工程 2016年16期
朱奇光 王梓巍 陳 穎
1.燕山大學(xué),秦皇島,0660042.河北省特種光纖與光纖傳感重點實驗室,秦皇島,066004
?
基于全局特征與局部特征的圖像分級匹配算法研究及應(yīng)用
朱奇光1,2王梓巍1陳穎1
1.燕山大學(xué),秦皇島,0660042.河北省特種光纖與光纖傳感重點實驗室,秦皇島,066004
移動機器人基于拓撲地圖導(dǎo)航時要求圖像特征提取與匹配算法具有高的精度和魯棒性、良好的實時性,針對此,提出了基于全局特征和局部特征的圖像分級匹配算法。首先對輸入的待匹配圖像應(yīng)用改進的形狀上下文算法提取全局特征與圖像庫中圖像進行遍歷粗匹配,得到與當(dāng)前待匹配圖像相似度最高的3幅圖像并構(gòu)建臨時圖像庫;然后利用改進的SIFT算法提取輸入圖像局部特征與臨時圖像庫中3幅圖像的局部特征進行精確匹配,最終得到與待匹配圖像相似度最高的圖像作為匹配結(jié)果輸出。所提出的圖像分級匹配算法將基于全局特征的改進形狀上下文算法和基于局部特征的改進SIFT算法相結(jié)合,從而達到優(yōu)勢互補的目的。實驗結(jié)果表明,該算法在機器人基于拓撲地圖導(dǎo)航過程中有效地提高了圖像匹配效率,縮短了運行時間。
移動機器人;圖像匹配;改進形狀上下文;改進SIFT
0 引言
在未知的環(huán)境中機器人依靠自身攜帶的傳感器創(chuàng)建環(huán)境模型是當(dāng)前機器人研究領(lǐng)域的一個熱點問題[1]。拓撲地圖是目前常用的一種環(huán)境模型。拓撲地圖中,最重要的是節(jié)點的創(chuàng)建與識別。機器人將提取的具有較強識別性的環(huán)境特征與拓撲節(jié)點綁定,在進行環(huán)境特征互相匹配時,需要有效地識別不同拓撲節(jié)點,最終實現(xiàn)機器人拓撲地圖的創(chuàng)建和導(dǎo)航。
通過研究基于圖像特征進行圖像匹配的文獻發(fā)現(xiàn),大部分學(xué)者均是將彩色圖像轉(zhuǎn)換為灰度圖像,僅僅利用亮度信息提取圖像特征[2]。在實際應(yīng)用中應(yīng)充分將亮度特征與顏色、紋理和形狀等特征相結(jié)合,提高圖像匹配的精確度和魯棒性。劉佳等[3]提出了基于多分辨率小波分解的改進尺度不變特征變換(scaleinvariantfeaturetransform,SIFT)[4]圖像匹配算法,改進后的算法提高了匹配精度,具有較好的定位效果,但是實時性較差,不滿足機器人導(dǎo)航的要求;Lu等[5]提出了基于顏色矩的改進SIFT圖像匹配算法,該改進算法提高了圖像匹配的速度,但顏色特征丟失了空間的位置信息,且顏色特征受光照變化影響較大,魯棒性較差;陳抒瑢等[6]提出全局紋理特征與SIFT特征相結(jié)合的圖像匹配算法,該算法對圖像尺度、旋轉(zhuǎn)、光照、視角等變化具有很強的魯棒性,但是計算量較大,無法滿足機器人導(dǎo)航的實時性要求;Zhong等[7]提出了融合局部形狀信息與SIFT特征的圖像匹配算法,改進后的算法能有效地降低錯配概率,獲得良好的仿射不變性,但是其計算量過大,降低了算法的匹配效率;高晶等[8]提出了一種基于曲率尺度空間提取關(guān)鍵點的角點檢測的圖像匹配算法,在噪聲干擾、尺度縮放、亮度變化的情況下具有較好的匹配效果,但是圖像特征匹配的速度有待提高。
移動機器人基于拓撲地圖導(dǎo)航時要求圖像特征提取與匹配算法具有高的精度和魯棒性,且有較好的實時性,針對此,提出了基于全局特征和局部特征的圖像分級匹配算法。該算法將圖像匹配分為粗匹配和精匹配兩個階段,融合全局特征和局部特征,從而達到優(yōu)勢互補的目的。
1 改進的圖像匹配算法
1.1改進的圖像匹配算法粗匹配
在圖像匹配過程中,相比于紋理特征和顏色特征,形狀特征是一種高級別的視覺信息,它所描述的視覺信息層次更高,范圍更大[9]。
形狀上下文特征是一種經(jīng)典的輪廓描述子,該描述子從輪廓點的空間位置出發(fā),利用對數(shù)極坐標直方圖對圖像中的物體輪廓分布情況進行統(tǒng)計以實現(xiàn)圖像匹配[10]。但是原始的形狀上下文描述子并不能準確地反映輪廓的全局特征,它只能計算出每個區(qū)域內(nèi)所含特征點的數(shù)量,著重描述整體輪廓分割后的局部輪廓,缺少全局信息。同時對平面進行分割時涉及參數(shù)(距離與角度)的確定,降低了算法的適應(yīng)性。最重要的是形狀上下文算法忽略了輪廓點之間的重要信息——順序關(guān)系。
針對形狀上下文算法存在的問題,本文采用改進的形狀上下文算法。采用改進的形狀上下文算法可得到以vi為參考點的由N個點構(gòu)成的輪廓空間,利用輪廓的順序關(guān)系將所有的上下文信息組合起來形成一個特征序列。
改進的形狀上下文算法前期處理與原始形狀上下文算法一致,得到以采樣點vi為原點的其余N-1個點在極坐標系中的相對極坐標l(vi,vj):
l(vi,vj)=li,j=(vi,vj)j=1,2,…,N;j≠i
(1)
因為輪廓點在形狀中具有自然的順序關(guān)系,根據(jù)此順序關(guān)系將式(1)表示的所有相對坐標數(shù)據(jù)li,j改寫成序列Li:
Li=(li,i+1,li,i+2,…li,N,li,1,…,li,i-2,li,i-1)T
(2)
式(2)即改進的形狀上下文描述子。
與原始的形狀上下文描述子相比,改進的形狀上下文描述子在包含輪廓點上下文信息的同時,還可以利用輪廓點的先后順序關(guān)系,準確地描述形狀的全局信息;對二維平面不需要進行分割,從而免除了確定若干分割參數(shù)的麻煩,減小算法計算量,同時提高了算法的通用性。
為了保證改進的形狀上下文描述子具有尺度不變性,對其進行局部歸一化處理。將每個輪廓點的形狀上下文描述子Li按順序進行排列,組成(N-1)×N的矩陣:
A=A(V)=[L1L2L3…LN-1LN]
(3)
分別對矩陣A的每一行進行歸一化:
(4)

若所有的輪廓點都計算其形狀上下文特征,則會導(dǎo)致對輪廓的描述過于精細,對形狀變形過于敏感。為了平衡描述子在準確性和敏感性之間的矛盾,提高其魯棒性,我們對改進的形狀上下文描述子進行平滑化處理[11]。
改進的形狀上下文描述子可表示為
(5)
式(5)包括N-1個序列,將此序列劃分為若干個互不相交的子序列:[1,t],[t+1,2t],[2t +1,3t],…。其中t是設(shè)定的正整數(shù)。然后分別對于每一個子序列計算其分量的均值:
(6)
其中,c=1,2,…,W,c表示劃分后第c個子序列的序號,W=(N-1)/t。由此W個均值構(gòu)成了平滑化處理后的改進上下文描述子:
(7)
改進的上下文描述子經(jīng)過平滑化處理后提高了魯棒性,同時降低了描述子維度,有效提高了算法運行效率。兩個輪廓首先進行形狀匹配,然后再進行相似性度量。形狀匹配問題的實質(zhì)就是通過計算形狀之間的匹配代價(對應(yīng)點之間的歐氏距離),然后應(yīng)用動態(tài)規(guī)劃算法尋找兩個輪廓點序列之間最佳對應(yīng)關(guān)系(匹配代價最小)。相似性度量時,分別計算輪廓的形狀復(fù)雜性,然后再求取形狀復(fù)雜性之間的歐氏距離。
1.2改進的圖像匹配算法精確匹配
針對SIFT算法因計算量大而導(dǎo)致在圖像匹配階段實時性較差的問題,本文提出了改進的SIFT算法。該算法通過減法聚類剔除冗余的特征點,將得到的特征描述子二值化,根據(jù)hash函數(shù)生成索引,以漢明距離進行相似性度量。改進后的算法實時性較好,匹配效率較高。
原始SIFT算法大量的特征點中含有許多相似度非常高的特征點,在圖像匹配中作用非常小,卻增加了后續(xù)運算的復(fù)雜度。在改進的SIFT算法中,應(yīng)用減法聚類剔除冗余的特征點。
減法聚類是一種密度聚類的算法,可以快速查找數(shù)據(jù)的數(shù)目和中心[12]。假設(shè)檢測出n個特征點組成的集合{x1,x2,…,xn}。改進的SIFT特征點檢測步驟如下:
(1)首先根據(jù)下式計算特征點集合中每個特征點的密度,得到密度指標M(xi):
(8)
其中,r1為鄰域半徑,d(xk,xi)為xk與xi的歐氏距離。根據(jù)文獻[13]及多次實驗驗證可知取r1=1.6為最優(yōu)值,實驗效果最理想。
(2)將尋找到的密度指標值最大的特征點作為首個聚類中心,然后除去該特征點的密度,再計算其他特征點的密度指標值Mk(xi)。
(9)
其中,r2=1.5 r1。
(3)按照上述步驟再次尋找密度指標的最大值,并把該特征點作為聚類中心,直到?jīng)]有新的聚類中心產(chǎn)生,則迭代終止。
SIFT算法的128維特征描述子匹配能力較強,但其數(shù)據(jù)量過大。改進SIFT算法對特征描述子進行二值化處理,保留特征描述子信息的同時大幅度減小數(shù)據(jù)量,從而提高了算法運行速度[14]。
將減法聚類運算處理后的特征點所生成的特征描述子進行二值化,把128維特征向量轉(zhuǎn)化為128位的二進制字符串。假設(shè)128維特征向量S=(S0,S1,…S127)。
(1)首先根據(jù)下式計算同一向量中Si(Si是特征描述子某一維的數(shù)值)和Si+1差的絕對值:
(2)根據(jù)Qi值,按下式計算128位二進制特征向量中每位數(shù)值bi,得到二值化的特征描述子b={b0, b1,…,b127}:
(11)
式(11)中R為差值的閾值,其作用是將式(10)所得的差值均勻分成兩部分。本文取R=14。
針對改進的特征描述子本文利用hash值作為索引,以漢明距離度量特征描述子之間的相似度。改進后的特征匹配方法提高了檢索效率。
首先根據(jù)hash函數(shù)計算出代表特征點的128位二進制字符串的hash值。令
Ni=bi×8×20+bi×8×21+…+bi×8×27
(12)
其中i=0,1,…,15,并且N16= N0。同時:
(13)
hash函數(shù)定義如下:
H(h0,h1,…,h15)=h0×20+h1×21+…+h15×215
(14)
其計算結(jié)果即hash值,變化范圍為0~65 535。
在匹配階段首先對待查詢圖像執(zhí)行改進的特征點檢測步驟并生成描述子,將生成的二值化特征描述子根據(jù)式(14)計算其hash值并在hash庫中進行檢索。
ni代表圖像i與當(dāng)前查詢圖像之間相似特征描述子的數(shù)量,初始化ni=0。計算兩個特征描述子之間的漢明距離,若小于閾值則ni←ni+1,表示兩個圖像之間存在一對匹配成功特征。當(dāng)待匹配圖像所有的特征均在hash庫中進行了檢索,則根據(jù)ni最大值決定匹配成功的圖像。
1.3圖像分級匹配算法總體流程
移動機器人基于拓撲地圖導(dǎo)航時,節(jié)點識別采用基于全局特征與局部特征的圖像分級匹配算法。該算法總體流程如圖1所示。
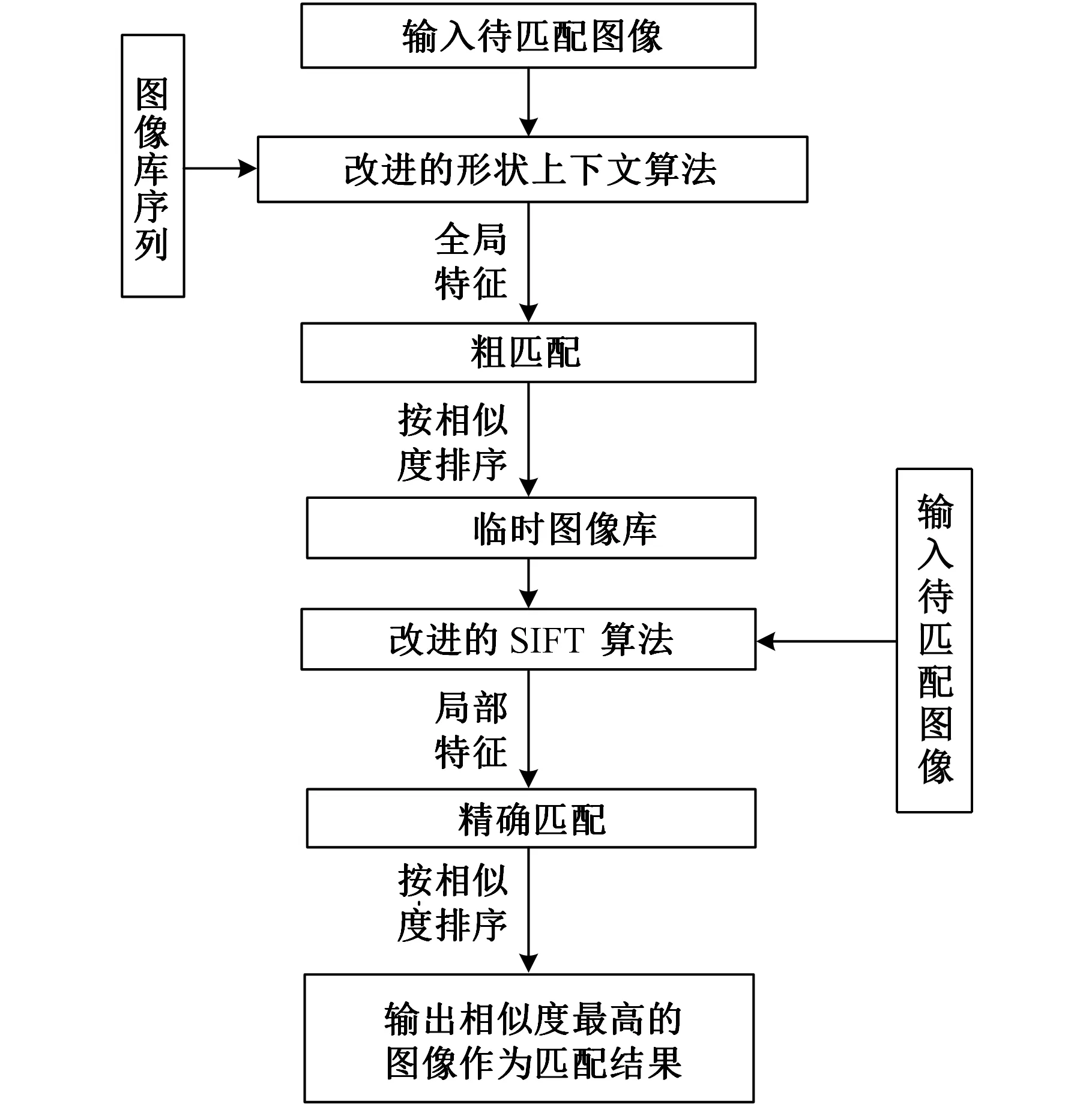
圖1 算法流程圖
首先對輸入的待匹配圖像應(yīng)用改進的形狀上下文算法提取全局特征與圖像庫中圖像進行遍歷粗匹配,得到與當(dāng)前待匹配圖像相似度最高的3幅圖像并構(gòu)建臨時圖像庫;然后利用改進的SIFT算法提取輸入圖像和臨時圖像庫中3幅圖像的局部特征,并進行精確匹配,最終得到與待匹配圖像相似度最高的圖像作為匹配結(jié)果輸出。
2 實驗與仿真研究
本文實驗和仿真研究采用Pioneer3TM平臺,其中視覺系統(tǒng)的單目攝像頭為CanonVC-C50i,其垂直方向旋轉(zhuǎn)范圍為±30°,水平方向旋轉(zhuǎn)范圍為±100°,最大分辨率為704pixel×576pixel。實驗仿真部分均基于配置為i3-2310MCPU2.10GHZ、內(nèi)存2GB的PC機,并以MATLAB8.1為平臺進行。移動機器人平臺和視覺攝像頭分別如圖2和圖3所示。

圖2 移動機器人平臺 圖3 視覺攝像頭
2.1實驗參數(shù)的設(shè)定
改進的形狀上下文算法主要涉及三個參數(shù)的設(shè)定:輪廓采樣點數(shù)N;平滑化處理參數(shù)t;形狀描述子長度W。
改進的形狀上下文算法輪廓采樣點數(shù)的設(shè)置與許多常見形狀輪廓描述子相同,取N=100。經(jīng)過多次仿真實驗驗證,當(dāng)N=100時,能夠得到一個運算速度和準確率平衡的實驗結(jié)果。
若改進的算法采納所有采樣點的數(shù)據(jù),則對形狀的描述過于精細,從而降低了算法對局部形變的魯棒性。為了在精確性與魯棒性之間取得良好的折中,本文采用平滑化處理技術(shù)對采樣點進行處理。根據(jù)本文所提出算法在實驗所需的圖像庫中進行檢索,得到如圖4所示的圖像檢索準確率η與平滑化處理參數(shù)t的關(guān)系。由圖4可知,當(dāng)t=6時,圖像檢索準確率η最高,實驗效果最佳。
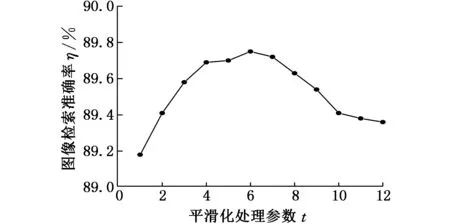
圖4 圖像檢索精度與平滑化處理參數(shù)的關(guān)系
本文算法的形狀描述子特征向量維數(shù)W=(N-1)/t,即特征向量的維數(shù)由采樣點數(shù)量和平滑化參數(shù)確定。根據(jù)N=100,t=6,可得W=16。由于每個特征向量都描述一個二維坐標數(shù)據(jù),因此改進后的形狀描述子特征向量實際維數(shù)為2W=32。與形狀上下文描述子特征向量60維[15],內(nèi)距離形狀上下文描述子[16]特征向量90維相比,改進的算法特征向量維數(shù)較低,運算效率較高。
改進的SIFT算法的主要參數(shù)是閾值R。R的作用是將式(10)所得的差值均勻分成兩部分。實驗隨機選取圖像庫9幅圖像作為實驗圖像,統(tǒng)計同一特征符128維數(shù)值間相鄰數(shù)值差的絕對值信息。通過對實驗數(shù)據(jù)(圖5)進行分析可知:S1區(qū)域共包含96 535個差值,S2區(qū)域共包含96 557個差值。即R=14時,可以將所有差值的絕對值分成數(shù)量相等的兩組。

圖5 差值絕對值的數(shù)量分布圖
2.2圖像匹配實驗
改進的形狀上下文算法幾何意義明確、易于計算、描述性強,圖像的匹配效果較好。相對于原始的形狀上下文算法,改進算法避免了直方圖計算、參數(shù)選取等問題,保留了較為準確的輪廓點相對位置信息,通過輪廓點的順序關(guān)系增加了描述子的全局形狀信息。根據(jù)2.1節(jié)可知改進后的形狀上下文描述子維數(shù)為32。與形狀上下文描述子特征向量60維、SIFT描述子特征向量128維相比,改進的形狀上下文圖像匹配算法描述子維數(shù)較低,運算效率較高。與使用SIFT算法相此,改進的形狀上下文算法將待匹配與圖像庫進行粗略遍歷匹配,縮減了大量運算時間,避免了精確遍歷匹配整個圖像庫,提高了算法的運行效率,有利于機器人實時性導(dǎo)航。
圖像粗匹配實驗采用由Pioneer3TM視覺系統(tǒng)的單目攝像頭在筆者實驗室拍攝的大量環(huán)境圖像中的9幅作為圖像庫,分別標記為A、B、C、D、E、F、G、H、I,如圖6所示。

圖6 實驗圖像庫
假設(shè)A為待匹配圖像,表1為僅使用本文所提出的改進SIFT算法將待匹配圖像與圖像庫遍歷匹配得到的實驗數(shù)據(jù);表2為使用改進的形狀上下文算法將待匹配圖像與圖像庫進行遍歷粗匹配得到的實驗數(shù)據(jù),圖7為粗匹配返回的圖像構(gòu)建的臨時圖像庫。根據(jù)表1和表2可知:僅使用改進的SIFT算法進行圖像匹配所需時間為11.914s;若使用本文提出的圖像分級匹配算法,所需時間為改進的形狀上下文算法匹配的時間與待匹配圖像A應(yīng)用改進的SIFT算法遍歷匹配臨時圖像庫時間之和,即0.707s+1.892s+1.576s+1.389s=5.564s。
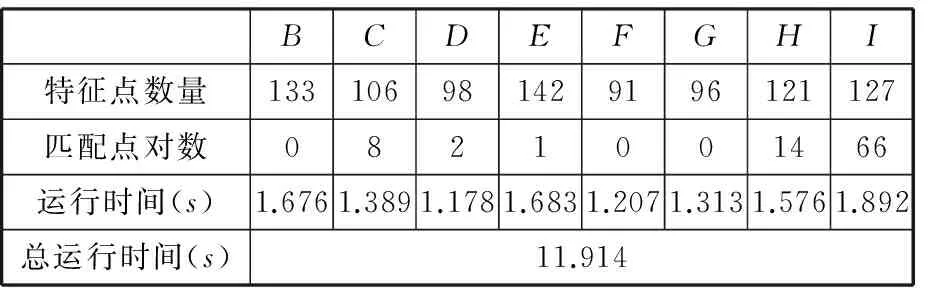
表1 改進SIFT算法圖像匹配實驗數(shù)據(jù)

表2 改進的形狀上下文算法圖像匹配實驗數(shù)據(jù)
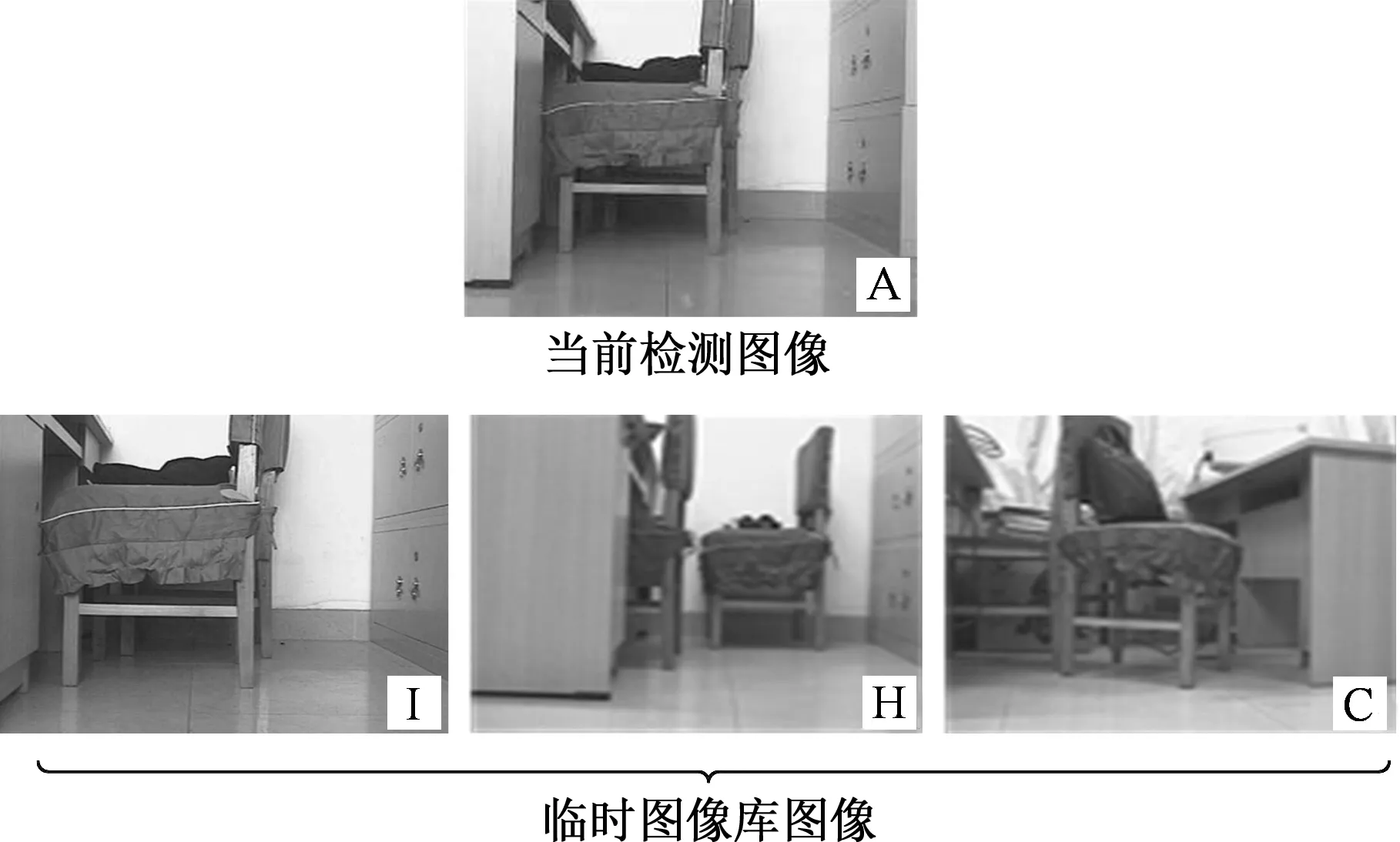
圖7 粗匹配返回結(jié)果

(a)SIFT算法 (b)I-SIFT算法圖8 尺度和視角變換

(a)SIFT算法 (b)I-SIFT算法圖9 光照變換

(a)SIFT算法 (b)I-SIFT算法圖10 加入混合噪聲
本文提出的基于全局特征和局部特征的圖像分級匹配算法在精確匹配階段采用改進的SIFT算法(I-SIFT算法)。為了驗證I-SIFT算法的性能,隨機挑選機器人真實運行環(huán)境里的三組圖像,在尺度與視角變換、光照變換、加入混合噪聲三種情況下進行對比試驗。圖8兩分圖中的圖像是前后移動0.5m,同時左右旋轉(zhuǎn)20°拍攝的;圖9兩分圖中的圖像是機器人在不同光照環(huán)境下拍攝的;圖10兩分圖中左側(cè)為移動機器人視覺攝像頭正常拍攝的圖像,右側(cè)為加入混合噪聲的圖像,混合噪聲由均值為0、方差為0.01的高斯噪聲和噪聲密度為0.5椒鹽噪聲組成。圖8~圖10是I-SIFT算法與原始的SIFT算法進行對比實驗的匹配結(jié)果,表3為實驗所得數(shù)據(jù)。
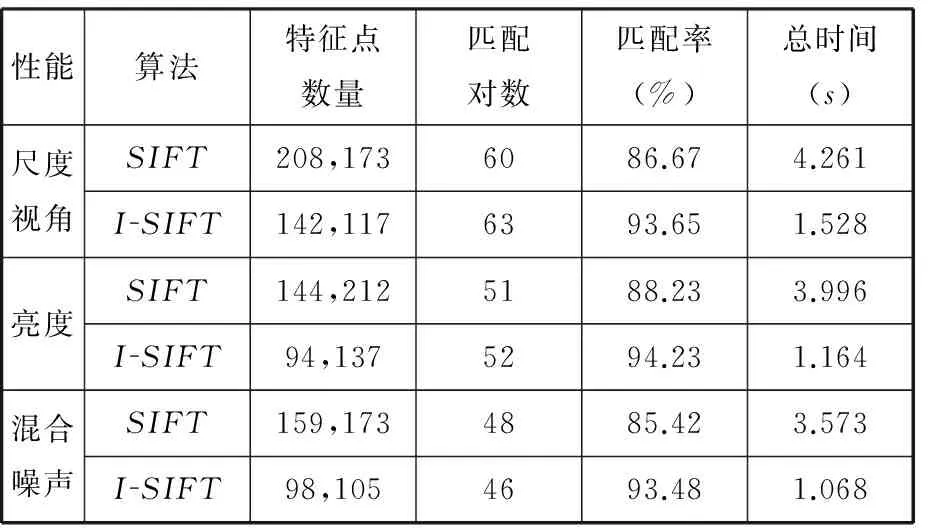
表3 改進 SIFT與原始SIFT算法圖像匹配性能比較
表3中SIFT代表原始的SIFT算法。特征點數(shù)量代表樣本圖像和待匹配圖像的特征點數(shù)量,匹配對數(shù)即兩幅圖像成功匹配的對數(shù),匹配率為正確匹配對數(shù)與匹配對數(shù)的比值,總時間即整個匹配過程的總時間。根據(jù)表中數(shù)據(jù),與SIFT相比,I-SIFT中各組圖像特征點數(shù)量減少30%~40%;匹配對數(shù)基本維持不變;匹配率增長6%~12%;匹配時間降低60%~70%。原因在于本文在提取完特征點之后采用減法聚類算法,將存在于大量特征點中的冗余點進行了剔除。同時二值化后的特征描述符依據(jù)hash函數(shù)生成索引值,采用漢明距離進行相似性度量,由于計算機本身以二進制作為內(nèi)部運算邏輯,在運算過程中有很大的優(yōu)勢,且避免了度量階段計算歐氏距離所需的開平方運算,從而提高了算法的運行速度,降低了誤匹配率。
2.3圖像分級匹配算法性能分析
基于局部特征的改進SIFT算法魯棒性較好、精度高,對旋轉(zhuǎn)、光照、尺度等環(huán)境改變不變性較好,但是描述子維度高,匹配耗時大,不適合對圖像庫進行遍歷匹配。基于全局特征的改進形狀上下文算法描述的信息層次更高、范圍更大,融入了輪廓的順序關(guān)系,簡化了描述子的定義和計算過程,匹配效率非常高。但是對形狀的輪廓比較敏感、易受噪聲影響,且輪廓點是均勻提取,對形狀的描述還有局限。本文提出的圖像分級匹配算法將基于局部特征的改進SIFT算法和基于全局特征的改進形狀上下文算法相結(jié)合,從而達到優(yōu)勢互補的目的。
為了驗證本文所提出的基于全局特征和局部特征的圖像分級匹配算法的優(yōu)勢,構(gòu)建5個分別由4幅、8幅、12幅、16幅、20幅環(huán)境圖像組成的圖像庫,依次利用原始SIFT算法、基于顏色矩的改進SIFT圖像匹配算法(該算法首先根據(jù)顏色矩將圖像庫進行排序,再由基于Sobel算子和迭代搜索的改進SIFT算法對排序后的圖像序列進行精確匹配)、本文算法進行圖像匹配。每組實驗均進行10次,然后取平均值作為實驗結(jié)果。實驗結(jié)果如圖11所示。其中,SIFT代表原始的SIFT算法,C-SIFT代表基于顏色矩的改進SIFT圖像匹配算法,S-SIFT即本文提出的基于全局特征和局部特征的圖像分級匹配算法。
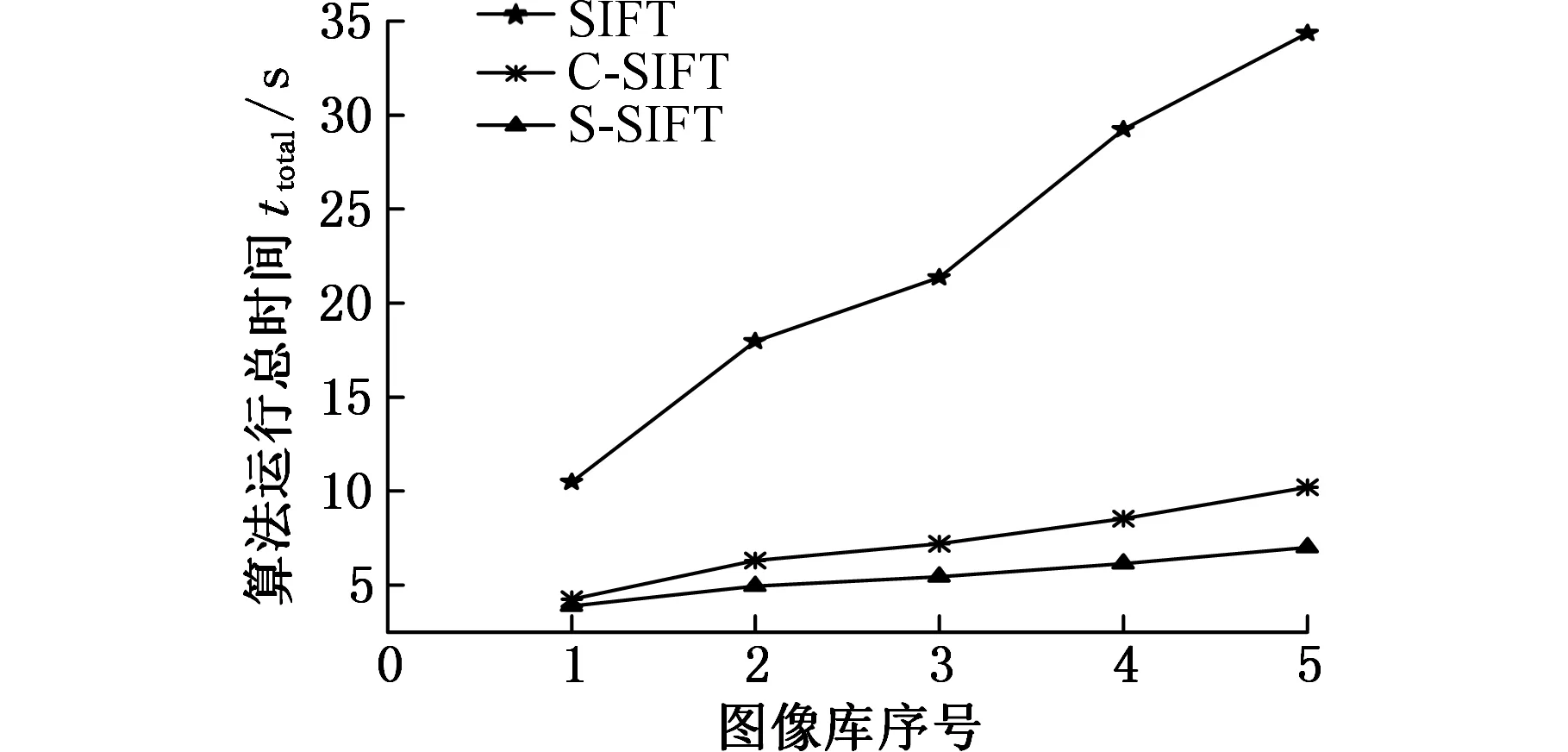
(a)匹配總時間

(b)平均匹配正確率圖11 SIFT、C-SIFT和S-SIFT在不同圖像庫的性能對比
移動機器人在基于拓撲地圖導(dǎo)航過程中,應(yīng)用本文所提出的圖像匹配算法,在時間和匹配正確率方面均優(yōu)于上述兩種算法。隨著圖像庫中圖像數(shù)量增加,三種算法的運行總時間均增加,平均匹配正確率均下降。但本文所提出算法運行總時間上升趨勢緩慢且運行速度較快,平均匹配正確率保持在90%以上。
3 結(jié)語
針對移動機器人基于拓撲地圖導(dǎo)航時對圖像特征提取與匹配算法的要求,提出了圖像分級匹配算法,將基于全局特征的改進形狀上下文算法和基于局部特征的改進SIFT算法相結(jié)合,實現(xiàn)了拓撲地圖節(jié)點的識別,最終實現(xiàn)機器人基于拓撲地圖的導(dǎo)航。實驗結(jié)果表明該算法在基于圖像匹配的移動機器人導(dǎo)航研究中是有效的。
[1]王殿軍.雙目視覺在移動機器人定位中的應(yīng)用[J].中國機械工程,2013,24(9):1155-1158.
Wang Dianjun. Application on Binocular Vision System of a Mobile Robot[J]. China Mechanical Engineering,2013,24(9):1155-1158.
[2]陳衛(wèi)東,張興家,朱奇光,等. 基于混合特征的移動機器人圖像匹配算法[J]. 中國機械工程, 2015,26(9): 1137-1141.
Chen Weidong, Zhang Xingjia, Zhu Qiguang, et al. An Image Matching Algorithm for Mobile Robot Localization Based on Hybrid Features[J]. China Mechanical Engineering, 2015, 26(9): 1137-1141.
[3]劉佳, 傅衛(wèi)平, 王雯,等. 基于改進SIFT算法的圖像匹配[J]. 儀器儀表學(xué)報, 2013, 34(5):1107-1112.
Liu Jia,F(xiàn)u Weiping, Wang Wen, et al. Image Matching Based on Improved SIFT Algorithm[J]. Chinese Journal of Scientific Instrument, 2013, 34(5):1107-1112.
[4]Lowe D G. Distinctive Image Features from Scale- Invariant Keypoints[J]. International Journal of Computer Vision, 2004, 60(2): 91-110.
[5]Lu B, Whangbo T K. A SIFT-Color Moments Descriptor for Object Recognition[C]// 2014 International Conference on IT Convergence and Security (ICITCS). Beijing, 2014:1-3.
[6]陳抒瑢, 李勃, 董蓉,等. Contourlet-SIFT特征匹配算法[J].電子與信息學(xué)報, 2013,35(5): 1215-1221.
Chen Shurong, Li Bo, Dong Rong, et al. Contourlet-SIFT Feature Matching Algorithm[J]. Journal of Electronics & Information Technology, 2013,35(5): 1215-1221.
[7]Zhong Jinqin, Tan Jieqing, Gu Lichuan. SIFT Feature Matching Algorithm with Local Shape Context [J]. International Journal of Applied Mathematics & StatisticsTM, 2013, 46(16):93-101.
[8]高晶, 吳育峰, 吳昆,等. 基于角點檢測的圖像匹配算法[J]. 儀器儀表學(xué)報, 2013, 34(8): 1717-1725.
Gao Jing, Wu Yufeng, Wu Kun, et al. Image Matching Method Based on Corner Detection[J]. Chinese Journal of Scientific Instrument, 2013, 34(8):1717-1725.
[9]周瑜, 劉俊濤, 白翔. 形狀匹配方法研究與展望[J]. 自動化學(xué)報, 2012, 38(6):889-910.
Zhou Yu, Liu Juntao, Bai Xiang. Research and Perspective on Shape Matching[J]. Acta Automatica Sinica, 2012, 38(6):889-910.
[10]鮑文霞, 梁棟, 程志友,等. 一種基于圖理論的非剛體形狀匹配算法[J]. 儀器儀表學(xué)報, 2009, 30(10):2027-2032.
Bao Wenxia, Liang Dong, Cheng Zhiyou,et al. Graph Theory Based Non-rigid Shape Matching Algorithm[J]. Chinese Journal of Scientific Instrument, 2009, 30(10):2027-2032.
[11]史思琦. 基于輪廓特征的目標識別研究[D].西安:西安電子科技大學(xué), 2012.
[12]李洪波. 基于減法聚類和快速緊密性函數(shù)的 SF-FCM[J]. 控制與決策, 2011, 26(7): 1074-1078.
Li Hongbo. SF-FCM Based on Fast Close Function and Subtractive Clustering[J].Control and Decision, 2011, 26(7): 1074-1078.
[13]Alitappeh R J, Saravi K J, Mahmoudi F. Key Point Reduction in SIFT Descriptor Used by Subtractive Clustering[C]// Information Science, Signal Processing and their Applications (ISSPA), 11th International Conference on IEEE. Montreal, 2012:906 - 911.
[14]毋立芳, 侯亞希, 周鵬,等. 基于最大位平均熵的SIFT描述子二值化及相似度匹配方法[P]. 中國專利: 103617431A, 2014-03-05.
[15]Belongie S J, Malik J, Puzicha J. Shape Matching and Object Recognition Using Shape Contexts[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2002, 24(4):509-522.
[16]Haibin L, Jacobs D W. Shape Classification Using the Inner-distance[J]. IEEE Transactions on Pattern Analysis & Machine Intelligence, 2007, 29(2):286-299.
(編輯盧湘帆)
InvestigationandApplicationonImageHierarchicalMatchingAlgorithmBasedonGlobalFeatureandLocalFeature
ZhuQiguang1,2WangZiwei1ChenYing3
1.YanshanUniversity,Qinhuangdao,Hebei,066004 2.TheKeyLaboratoryforSpecialFiberandFiberSensorofHebeiProvince,Qinhuangdao,Hebei,066004
Aimingattheproblemsthattheimagefeatureextractionandmatchalgorithmshouldhavehighaccuracy,goodperformanceinreal-timeandrobustnesswhenthemobilerobotnavigatedbasedontopologicalmap,thepaperproposedanewimagehierarchicalmatchingalgorithmbasedontheglobalfeatureandlocalfusion.First,theimprovedshapecontextalgorithmwasappliedtotheinputimagestobematchedtoextracttheglobalfeatureswhichwerematchedroughlywiththeimagesinthedatabase,obtaining3imagesthathadthehighestsimilaritytothecurrentimagewhichconstitutedatemporaryimagedatabase.Then,theimprovedSIFTalgorithmwereusedtoextractlocalfeatureoftheinputimageswhichwerematchedaccuratelywiththelocalfeatureofthe3imagesinthetemporaryimagedatabase,finallyobtainingtheimagewithhighestsimilarityasthematchresults.TheimagehierarchicalmatchingalgorithmbasedontheglobalfeatureandlocalfeaturecombinedtheimprovedshapecontextalgorithmbasedonglobalfeaturesandtheimprovedSIFTalgorithmbasedonlocalfeatures,soastoachievethepurposeofcomplementaryadvantages.Theexperimentalresultsshowthatthisalgorithmcaneffectivelyimprovethematchingefficiencyandreducetherunningtimewhenthemobilerobotsnavigatebasedontopologicalmap.
mobilerobot;imagematching;improvedshapecontext;improvedSIFT
2016-04-22
國家自然科學(xué)基金資助項目(61201112);河北省自然科學(xué)基金資助項目(F2016203245);河北省普通高等學(xué)校青年拔尖人才計劃資助項目(BJ2014056)
TP391
10.3969/j.issn.1004-132X.2016.16.015
朱奇光,男,1978年生。燕山大學(xué)信息科學(xué)與工程學(xué)院副教授。主要研究方向為機器人智能控制及應(yīng)用。發(fā)表論文30余篇。王梓巍,男,1992年生。燕山大學(xué)信息科學(xué)與工程學(xué)院碩士研究生。陳穎,女,1980年生。燕山大學(xué)電氣工程學(xué)院教授。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
北京航空航天大學(xué)學(xué)報(2022年6期)2022-07-02 01:59:12
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
制造技術(shù)與機床(2017年3期)2017-06-23 08:11:21
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
中國海洋大學(xué)學(xué)報(自然科學(xué)版)(2014年8期)2014-02-28 12:21:31