基于單片機的直流電機閉環調速控制系統
2016-08-29 02:14:34湖南鐵道職業技術學院
電子世界 2016年15期
關鍵詞:單片機
湖南鐵道職業技術學院 劉 彤
?
基于單片機的直流電機閉環調速控制系統
湖南鐵道職業技術學院劉彤
本文介紹一種小型直流電機轉速閉環控制系統,以單片機為核心,輸出PWM驅動電機,數字增量式PID調節轉速,實現對直流電機轉速控制,給出了軟硬件設計方案,進行了實驗效果對比,取得了較好的控制效果。
直流電機;L298N;PWM;增量式PID
0 引言
直流電機在工業控制、家電領域得到了廣泛應用,其調速有用專用芯片實現的,有用單片機實現的。51系列單片機作為入門級的單片機,也能夠實現對直流電機的調速控制,基于PID算法的速度調節,具有精度高、成本低等優點,比較適合初學者學習和使用。
1 系統結構設計
設計一個小型直流電機調速系統,實現直流電機啟動、停止、加速、減速等功能。系統以單片機為核心,擴展電機驅動電路驅動直流電機,擴展轉速檢測電路檢測電機的轉速,擴展人機交互電路,按鍵控制電機,調節電機轉速,電機轉速反饋經PID算法調節輸出,在LCD上顯示出來,系統結構如圖1所示。
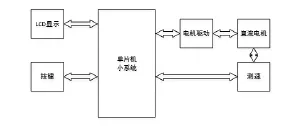

圖1 系統結構框圖
系統選用STC89C52RC單片機為核心,指令執行速度比普通51單片機快一倍,且具有三個16位定時/計數器,適合小型直流電機控制,成本低廉,性價比高[1]。人機交互電路包括按鍵電路和LCD顯示電路。按鍵電路由四個獨立按鍵接入單片機I/O端口,完成電機啟動、停止、加速和減速等的操作控制,LCD顯示使用LCD1602液晶顯示器,顯示2行,每行16個字符,第一行顯示電機設置轉速、第二行顯示當前轉速。
2 電機驅動
直流電機采用專用驅動芯片L298N,L298N是一種高電壓,大電流的電機驅動芯片,最高工作電壓可達46V,持續工作電流為2A,內含兩個H橋的高電壓大電流全橋式驅動器,可以用來驅動直流電機和步進電機、繼電器線圈等感性負載。與電機控制相關的引腳每個電機有三個,ENA 、IN1和IN2一組,ENB、IN3和IN4一組。ENA、ENB是使能端,IN1、IN2、IN3、IN4是方向控制端,使能端和方向控制端組合完成電機控制,控制關系表見表1所示。

表1 L298N電機控制功能表
直流電機驅動電路如圖2所示[2],L298N的使能控制端ENA或ENB直接接+5V電源,打開使能端,IN1、IN2、IN3和IN4接單片機的I/O端口,根據上表,單片機輸出高、低電平,控制電機旋轉,如果輸出采用PWM方式,就可以控制電機的轉速。L298N電源采用二組供電,一組電源+5V供給邏輯控制電路,另一組電源+12V供給電機驅動。電機輸出加入續流二極管,保護驅動電路。
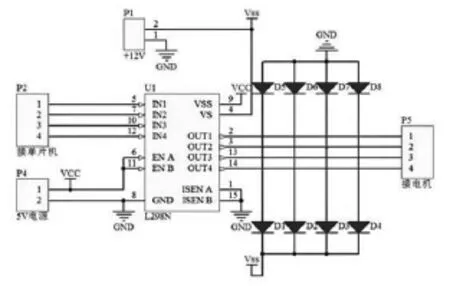
圖2 L298驅動接口電路
3 電機測速
系統使用紅外光電傳感器加旋轉碼盤來測量電機轉速,紅外光電傳感器的發射器和接收器分別位于U型槽的兩邊,圓形碼盤四周刻上一定數量的長方形槽,碼盤和電機旋轉軸固定,和電機一起旋轉,當碼盤開槽的地方經過U型紅外傳感器,發射管發射的光電信號能夠被接收管接受,當碼盤沒有開槽的地方經過U型槽,阻斷光軸時,光電開關就產生了檢測到的開關信號,經施密特觸發器整形送入單片機端口,電機測速原理如圖3所示。
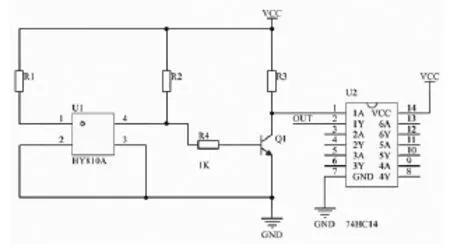

圖3 電機測速原理圖
轉速計算公式為:r/min,其中,n是脈沖的個數,N是碼盤槽數,t是采樣時間。可以看出速度v的誤差主要是由碼盤上的槽數的多少決定的,提高槽的數量 可以減少系統誤差,這里取凹槽數N為120,采樣時間t為0.5秒,單片機定時器定時采樣測速[3]。
4 軟件設計
軟件設計重點是轉速調節,采用轉速閉環控制,具體策略是利用單片機定時器定時采樣,測量電機轉速,經過PID算法改變單片機輸出PWM波的占空比,調節電機轉速。系統軟件主要由主程序和一個定時中斷程序組成,主程序完成系統初始化、按鍵操作和LCD顯示等功能,流程圖如圖4所示。
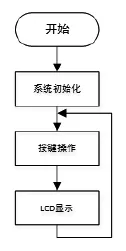
圖4 主程序流程圖
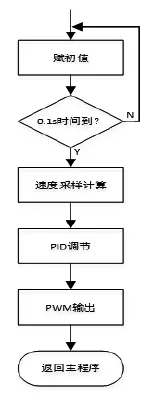
圖5 定時器中斷流程圖
轉速PID調節采用數字增量式PID算法,即:

其中,Kp-比例系數,KI= Kp*(T/Ti),KD=Kp*(Td/T)將速度采樣作為當前輸入,與速度設定值進行相減得偏差,對偏差進行PID運算產生輸出結果控制定時器輸出占空比進而控制轉速[4],定時器0.1s做一次速度采集、PID運算和PWM占空比改變,調節電機轉速,定時器中斷程序流程圖如圖5所示。
5 實驗與調試
為了驗證PID轉速調節的效果,分別進行無PID調節轉速測試和有PID調節轉速測試對比實驗,測試轉速1800r/min時的數據繪制曲線,如圖6所示。
曲線1是無PID調節轉速曲線,曲線2是有PID調節轉速曲線,可以看出,加入PID調節后的轉速閉環控制,轉速超調量減小,穩定時間縮短,提高了轉速控制的精度和穩定性。
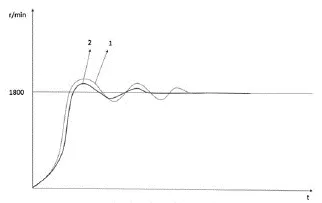
圖6 轉速PID調節效果圖
6 結論
本文以單片機為核心,設計直流電機轉速閉環控制系統,PWM輸出驅動電機,采用數字增量式PID調節PWM輸出占空比,取得了較好的轉速控制效果,實現了直流電機啟動、停止、加減速等功能,并且顯示在LCD上。
[1]周航慈.單片機應用程序設計技術(第3版)[M].北京:北京航空航天大學出版社,1991.
[2]孫賢安,陳南,王金湘.基于51單片機的小車避障電路實現[J].機械制造與自動化,2005(05).
[3]曹應明.基于STC單片機的直流電機調速系統設計[J].計量與測試技術.2014(11).
[4] 向科,劉曉燕,文方.PIC16F777單片機在直流電機閉環調速系統中的應用[J].電氣應用,2007(01)
基金支持:2016年湖南鐵道職業技術學院校級課題(課題編號:K201609)。
劉彤(1972-),男,湖南株洲人,工學碩士,講師,主要研究領域:控制理論與控制工程。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36