四輪獨立電動汽車的驅動控制與平順性*(續1)
2016-08-21 01:52:48劉鑫許鳴珠
汽車工程師 2016年7期
劉鑫 許鳴珠
(石家莊鐵道大學)

基于輪轂電機的電動汽車可以實現分布驅動,對汽車行駛性能的可控度更高,所以文章借助虛擬機技術討論電動汽車驅動策略的控制方法和汽車平順性能的聯系。目前對汽車平順性的研究方向主要集中在簧下質量、汽車懸架的阻尼比及汽車質心位置3個方面[1]。文獻[2]主要就集成輪轂而造成的簧下質量增加進行了平順性試驗。在對電動汽車驅動力分配控制策略的制定過程中,主要考慮的是滑移率,或者汽車操縱穩定性,文獻[3]利用路面識別和等轉矩的反饋控制來減少汽車運行時的滑移率。文章提出了以等轉矩輸出為目標的控制策略,使用最優控制理論設計了驅動系統的反饋控制器,分別控制4個驅動電機的電流,有效提高了汽車行進的平順性。
1 建模
1.1 整車模型
以某轎車的車身參數作為樣車參數,樣車主要包括車身、底盤及電機驅動系統。設計前懸架為多桿懸架,后懸架為單橫臂式懸架,前者可以方便平穩轉向,后者可以抗側傾。轉向系統采用前輪轉向的齒輪齒條轉向系,沒有激活轉向助力。輪胎選用參數簡單,具有高度非線性和粘彈性的仿真模型——Fiala輪胎模型。Fiala輪胎模型是經典彈性圓環狀梁模型,輸出精度高,對輪胎的側偏效應有很好的反應,可應用于2D和3D路面[4]。為了創建不同的路面情況,選用2D道路中的隨機不平路面。
力學模型在ADAMS軟件中完成,電機模型利用Simulink軟件完成。汽車參數,如表1所示,最后建立四輪汽車力學模型,如圖1所示[5]。
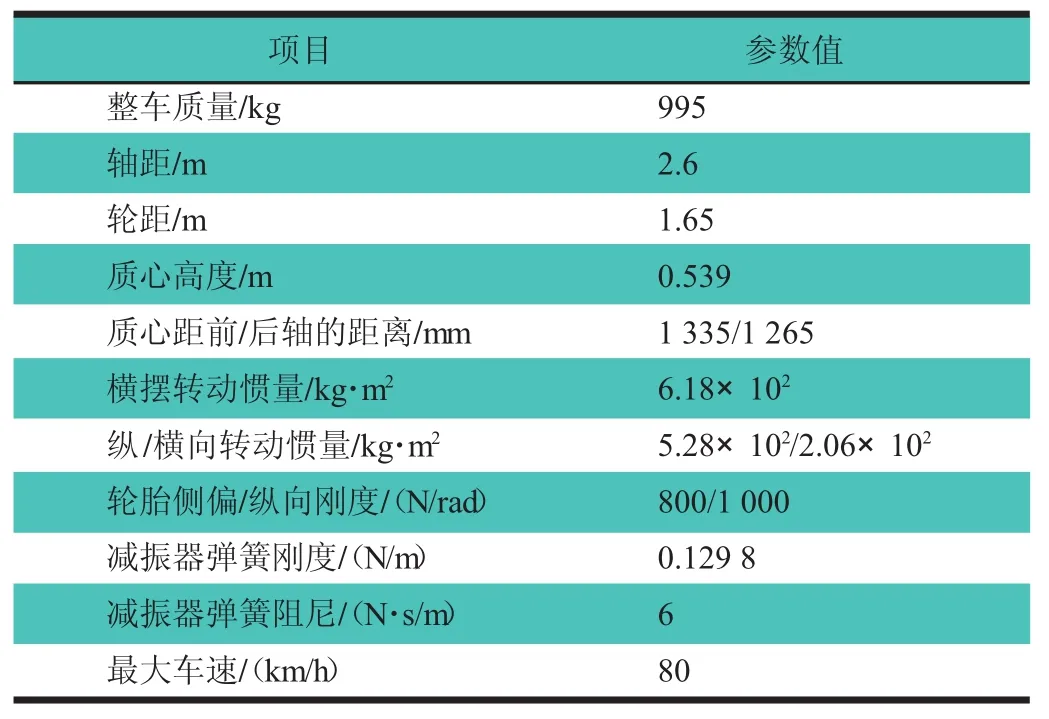
表1 樣車參數
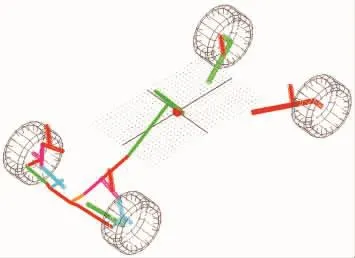
圖1 整車力學模型
1.2 電機模型
采用直流永磁電機,額定功率2 kW,額定電壓220 V,額定轉速3 000 r/min,建立電機平衡方程并進行拉氏變換,最后在Simulink環境下建立電機模型,如圖 2 所示[6]。
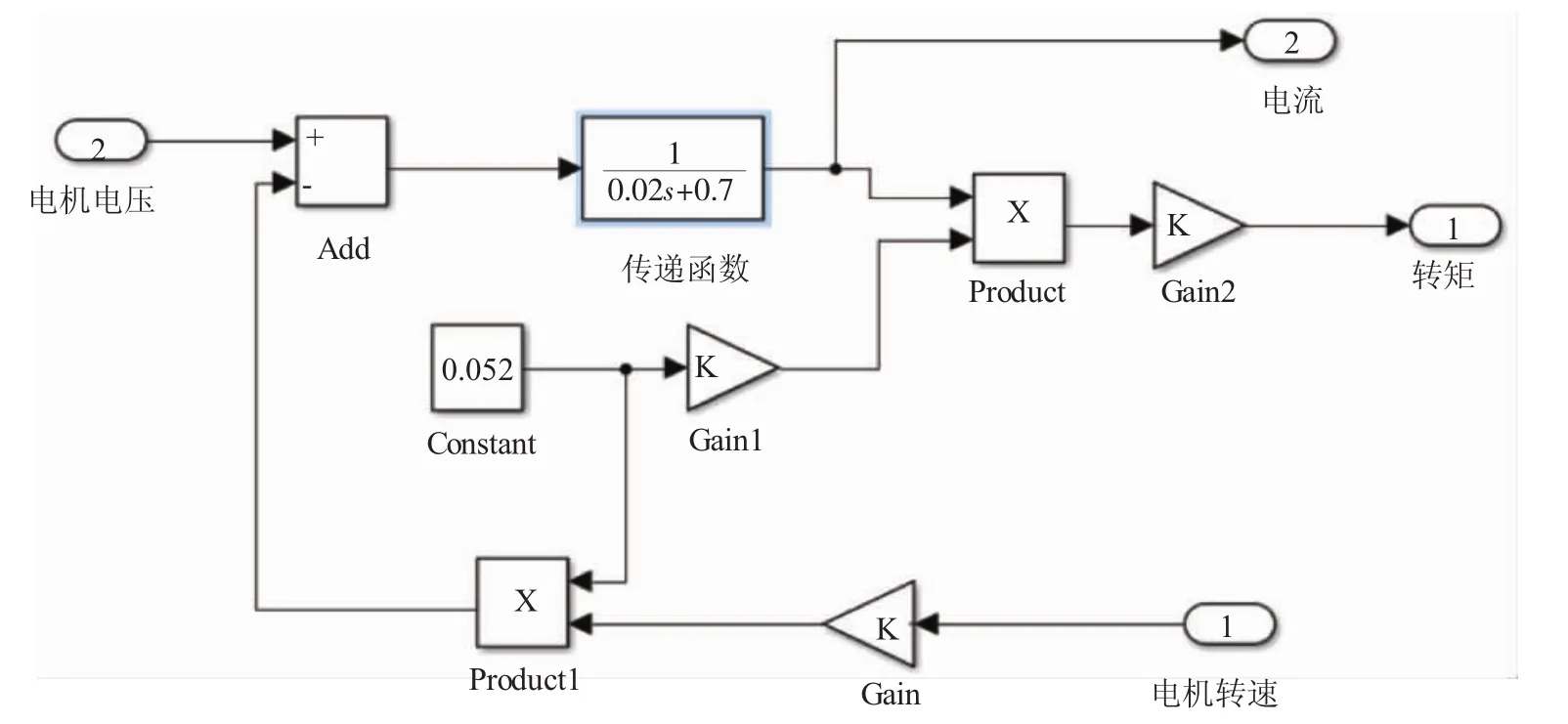
圖2 電機數學模型
2 驅動力矩分配策略
四輪電動汽車轉矩的分配策略主要有等轉矩分配或等功率分配原則,文章采用等轉矩分配原則,利用最優化電流的方法來控制4個輪轂電機的轉矩,以最小的誤差維持系統平衡狀態。首先,利用傳感器得到4個電機當前行駛狀態的電流值,求出電流的均值及其和每個電機電流的偏差,將電流偏差通過系統反饋到PWM驅動模塊,再通過控制電壓來調控電流偏差,減少波動,從而完成對驅動力矩的分配控制[7]。圖3示出整車驅動控制結構框圖。圖3中,Ri為每個輪轂電機電壓驅動的初始值;DSi是每個輪轂電機的驅動系統;FCi是每個驅動系統的反饋調節。
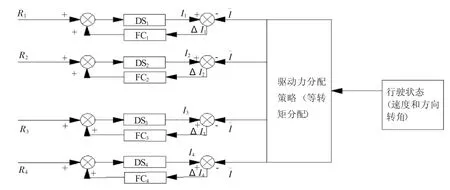
圖3 整車驅動控制結構框圖
(待續)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車與安全(2019年9期)2019-11-22 09:48:03
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
光學精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37
核科學與工程(2015年4期)2015-09-26 11:59:03
決策探索(2014年21期)2014-11-25 12:29:50
中學數學雜志(初中版)(2006年1期)2006-12-29 00:00:00
