永磁同步電動機轉速伺服系統PI控制器的一種新設計方法
2016-08-10 06:17:02左月飛南京航空航天大學自動化學院南京210016
電工技術學報 2016年13期
關鍵詞:系統
左月飛 劉 闖 張 捷 符 慧 張 濤(南京航空航天大學自動化學院 南京 210016)
?
永磁同步電動機轉速伺服系統PI控制器的一種新設計方法
左月飛劉闖張捷符慧張濤
(南京航空航天大學自動化學院南京210016)
提出了PI控制器的一種新設計方法,將所有已知和未知的擾動集中為總擾動,簡化系統模型,再用積分器作為擾動觀測器對總擾動進行觀測并補償。新型PI控制器中的參數與系統性能之間的關系非常簡單,易于整定。針對連續變化輸入,新型PI控制器引入了輸入微分前饋,具有更好的跟蹤性能,且輸入微分前饋僅是一個微分器,與電動機參數無關,進一步簡化了控制器的設計。采用離散最速跟蹤微分器對階躍輸入安排過渡過程,可以消除PI控制系統階躍響應的超調,同時提高系統階躍響應對控制器參數的不敏感性。實驗結果驗證了所提方法的有效性。
永磁同步電動機PI控制器參數整定連續變化輸入輸入微分前饋過渡過程
0 引言
永磁同步電動機(Permanent Magnetic Synchronous Motor,PMSM)以其高功率/重量比、高轉矩/慣量比、
高效率和具有一定魯棒性等優點逐漸取代直流電動機和其他電勵磁的電動機,被廣泛應用于工業調速系統中。傳統的PMSM轉速伺服系統大多采用雙環線性控制結構,內環為電流環,外環為速度環。隨著控制理論的發展,多種先進的復雜控制策略如非線性PI控制[1-3]、自適應控制[4,5]、模糊控制[6]、滑模變結構控制[7]、自 抗擾控 制 (ActiveDisturbanceRejectionControl,ADRC)[8-11]等被應用于PMSM轉速伺服系統中,但這些控制策略存在參數整定困難、算法復雜或存在抖振等問題。因此,在工業應用中占主導地位的控制仍是線性PI控制。
傳統的PI控制器大多根據頻域特性來整定控制器參數,文獻[12,13]通過幅值裕度和相位裕度得到旨在獲得最佳閉環特性的PID參數,文獻[14]建立了較為精確的PMSM控制系統模型,并給出了控制器的PI參數的解析計算式。由于考慮了較多的非理想環節,整定方法較為復雜,且難以定量分析它們對系統性能的影響。傳統的PI控制器多通過階躍響應考察系統的跟蹤性能,由于階躍輸入的微分量為脈沖信號,因此在建模時常忽略輸入的微分量。然而,當輸入為連續變化的信號時,忽略輸入的微分量將產生建模誤差。為此,文獻[15]基于內模控制的原理提出前饋控制來提高系統的跟蹤性能,但需要知道系統的精確數學模型。
針對傳統PI控制器的控制參數與系統性能關系復雜的問題,本文借鑒ADRC的控制思想,將外部擾動、建模誤差以及未建模擾動等所有已知和未知擾動集中為總擾動,然后用積分器作為擾動觀測器對總擾動進行觀測并補償,得到新型PI控制器。新型PI控制器從傳統PI控制器參數中分離出與電動機參數有關的控制增益,簡化了控制器參數與系統性能的關系,從而簡化參數整定過程。針對輸入連續變化的場合,新型PI控制器中同樣采用前饋控制的方法進行補償,不同的是,由于模型得到簡化,新型PI控制器的輸入微分前饋(Input Derivative Feedforward,IDF)環節只是一個微分器,與電動機參數無關,進一步簡化控制器的設計。利用新型PI控制系統能夠在無擾動的情況下無誤差地跟蹤連續變化輸入,采用文獻[16]提出的改進型離散最速跟蹤微分器對階躍輸入安排過渡過程,可以消除階躍響應的超調,并且可同時提高系統階躍響應性能對參數的不敏感性。最后通過實驗驗證了所提方法的正確性和實用性。
1 新型PI控制器的設計
1.1PMSM的數學模型
本文研究的是表貼式永磁同步電動機,則其在轉子磁場定向的同步旋轉坐標系(d-q坐標系)下的機械運動方程為

式中,J為系統的轉動慣量,kg·m2;B為系統的粘滯摩擦系數,N·m/(rad/s);TL為負載轉矩,N·m;Ω為機械角速度,rad/s;Kt為轉矩常數,N·m/A;iq為交軸電流,A。
1.2誤差反饋控制律設計



定義機械角速度給定值v與反饋值x1之差為角速度跟蹤誤差es,即es=v-x1,則由式(3)可得角速度跟蹤誤差的狀態方程為

采用線性比例反饋控制律,即

式中,kp為控制器的比例系數。
結合式(4)和式(5)可得控制量為

式(6)中的實際狀態x1和x2未知,可通過傳感器測量或用觀測器對其進行觀測。
通常,角速度可通過對角度信號直接微分得到,將其定義為y,并設y=x1+δns,其中δns為角速度Ω的測量噪聲。用y代替x1,則角速度跟蹤誤差變為es=v-y。
系統無擾動時,采用比例控制即可實現無穩態誤差,系統有擾動時,采用比例積分控制即可消除穩態誤差。由此可知,積分的作用就是抵消擾動對系統的影響,或積分器能夠觀測擾動。將x2替換為跟蹤誤差的積分,得到PI控制器下的控制量為


由于采用了積分器且輸出存在限幅,本文采用遇限停止積分的抗積分飽和方法,于是得到新型PI控制器的結構框圖如圖1所示。轉速環傳統PI控制器的結構框圖如圖2所示,PMSM矢量控制系統結構框圖如圖3所示。對比圖1和圖2可看出,新型PI控制器與傳統PI控制器在結構上的區別為:新型PI控制器多了一個輸入微分前饋環節和控制增益環節。

圖1 轉速環新型PI控制器結構框圖Fig.1 Block diagram of the novel PI controller for speedloop

圖2 轉速環傳統PI控制器結構框圖Fig.2 Block diagram of traditional PI controller for speedloop

圖3 矢量控制系統結構框圖Fig.3 Block diagram of vector control system
1.3系統響應
將式(7)代入式(4)可得閉環系統的輸出為

式中,λc(s)為閉環系統的特征多項式,λc(s)=s2+ kps+ki。
當無IDF時,系統在給定作用下的傳遞函數為

2 新型PI控制系統的性能分析
2.1系統對時變輸入的跟蹤性能
在連續變化輸入(如正弦給定)的作用下,輸入的微分量對應的控制量通常能夠被系統響應,因此輸入微分前饋可以起作用。由式(9)知,新型PI控制系統能夠在無擾動的情況下無誤差地跟蹤連續變化輸入。由式(10)知,傳統PI控制系統對連續變化輸入的跟蹤存在相位滯后,跟蹤誤差較大。
2.2系統的階躍響應


式中,ωd為阻尼自然頻率,rad/s;t為時間,s;φ為振蕩角,rad;ω1和ω2為兩個不同的衰減振蕩頻率,rad/s;m為振蕩頻率比;a、b為臨時變量。以上參數的計算公式如下

由式(12)和式(13)可知,超調量σ%隨阻尼比ζ的增大而減小,與無阻尼自然頻率ωn無關。百分超調量σ與阻尼比ζ間的關系如圖4所示。由圖4可看出,增大阻尼比可減小超調量,但并不能消除超調量。另外,增大阻尼比會減小阻尼自然頻率ωd,導致系統響應變慢。因此,為獲得較好的階躍響應,需同時增大ζ和ωn,但這受限于系統噪聲。
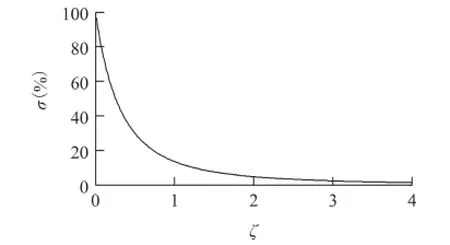
圖4 百分超調量與阻尼比間的關系Fig.4 The relationship between overshoot and damping ratio
2.3系統的抗擾性能及抑制測量噪聲性能
由式(9)可得,系統在擾動作用下的傳遞函數和在測量噪聲作用下的傳遞函數分別為

當ζ=1.0、ωn分別為30、60和90時,抗擾系統和抑制測量噪聲系統的頻域特性曲線如圖5所示。由圖5可看出,ωn越大,則抗擾系統的低頻幅值越小,抑制測量噪聲系統的高頻幅值越大,而諧振幅值不變。因此,ωn越大,系統抗低頻擾動的能力越強,階躍響應越快,且超調量不受影響,但抑制測量噪聲能力越差。


圖5 不同ωn時抗擾系統和抑制測量噪聲系統的頻域特性Fig.5 Frequency-domain characteristic of anti-disturbance system and measurement noise suppression system under different undamped natural frequency ωn
當ωn=60、ζ分別為0.5、1.0和2.0時,抗擾系統和抑制測量噪聲系統的頻域特性曲線如圖6所示。由圖6可看出,ζ越大,則抗擾系統在頻率接近ωn處的幅值越小,抑制測量噪聲系統的高頻幅值越大,而諧振幅值越小。因此,ζ越大,系統對頻率接近自然頻率ωn的擾動抑制能力越強,階躍響應越快,且超調量越小,但抑制測量噪聲能力越差。


圖6 不同ζ時抗擾系統和抑制測量噪聲系統的頻域特性Fig.6 Frequency-domain characteristic of anti-disturbance system and measurement noise suppression system under different damping ratio ζ
由式(9)可得新型PI控制系統的輸出

于是,式(7)中的積分項經Laplace變換為
由式(17)可知,積分器觀測到的擾動項中包含測量噪聲的微分信號。ωn越大,則積分器對擾動的觀測速度越快,系統抗擾性能越好,但同時噪聲也越大,即系統抗擾性能與抑制測量噪聲性能之間存在矛盾。對比式(10)和式(15)可知,系統在輸入作用下的傳遞函數和系統在測量噪聲下的傳遞函數相同,因此系統的階躍響應快速性與抑制測量噪聲性能之間也存在矛盾。
3 安排過渡過程以消除超調
新型PI控制系統能夠在無擾動的情況下無誤差地跟蹤連續變化輸入,但階躍響應卻存在超調,原因就在于階躍輸入下的輸入微分前饋環節不起作用。如果對階躍輸入安排過渡過程,減小輸入的微分量以便輸入微分前饋環節能夠起作用,則可消除系統階躍響應的超調。
文獻[8]提出了多種過渡過程,為使系統能對輸入的微分量有較好的響應,應選擇能使輸入微分量緩慢變化的過渡過程。因此,本文采用離散最速跟蹤微分器(DFTD)來安排過渡過程。由于文獻[8]提出的DFTD存在超調的問題,為此采用文獻[16]中改進后的DFTD,其結構框圖如圖7所示。

圖7 DFTD的結構框圖Fig.7 The block diagram of DFTD
圖7中x11為安排過渡過程后的新給定,x21為新給定的微分,對應的離散系統方程及其中的最速控制綜合函數fsun的算法公式分別為

式中,h為計算步長;nref為轉速給定,r/min;ceil(m0)表示取比m0大的最小整數。
假設過渡過程的時間為T,則函數fsun中的r及x21的最大值x21m分別為
若給定nref=800 r/min,則T分別為0.15 s、0.10 s 和0.05 s時,r分別為14 200、32 000和128 000。
4 實驗驗證
為驗證所提控制方法的有效性,對采用新型PI控制器永磁同步電動機調速系統的階躍響應、抗擾性能、跟蹤正弦輸入性能進行了實驗驗證。實驗中PMSM參數如表1所示。
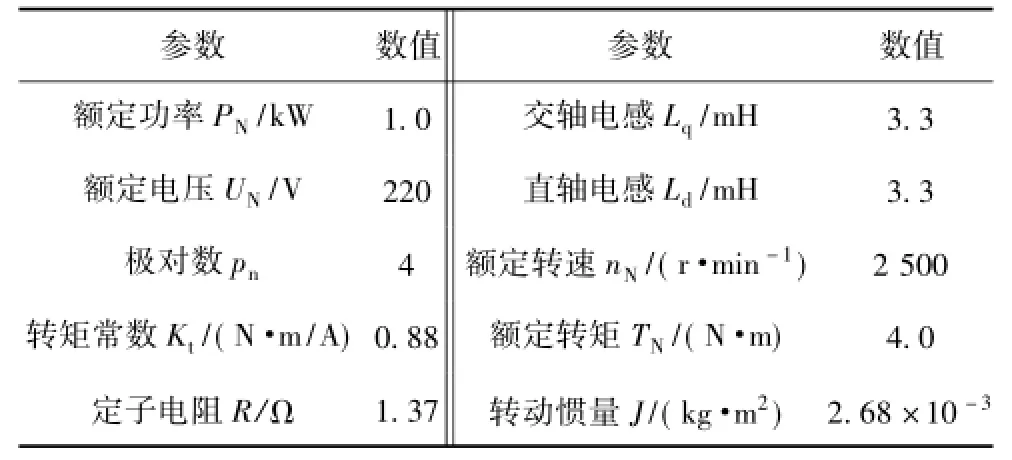
表1 電動機參數Tab.1 Motor parameters
永磁同步電動機調速系統的實驗平臺采用dSPACE實時仿真系統DS1103,利用快速原型法通過Simulink自動完成代碼生成與下載。實驗中的逆變器開關頻率為10 kHz,通過PWM中斷觸發電流采樣和占空比更新。
實驗中所用的負載曲線如圖8所示。由圖8可看出,加載過程時間較長,且負載變化率不恒定,而卸載時間較短(約80 ms),且負載變化率近似恒定,因此只做了卸載實驗。

圖8 實驗負載曲線Fig.8 Load curve in experiment



圖9 不同ζ下起動和變負載時的動態響應Fig.9 Dynamic response when starting and load varing under different damping ratio


圖10 不同ωn下起動和變負載時的動態響應Fig.10 Dynamic response when starting and load varingunder different undamped natural frequency

表2 不同ζ和ωn時的超調量和轉速變化量Tab.2 Overshoot and speed variation under different ζ and different ωn
由表2可看出,80 r/min起動時超調量的實驗值與理論值基本相符,驗證了理論的正確性,偏差是由實際起動時存在負載轉矩導致的。800 r/min起動時超調量的實驗值比80 r/min時的還要小,這是由系統控制量飽和導致的。卸載時轉速變化量的實驗值與理論值也基本相符,存在較小的偏差是由于理論卸載曲線與實際卸載曲線之間存在偏差導致的,并不影響ζ和ωn對系統抗擾性能的影響性質。
給定500 r/min、5 Hz的正弦轉速,取ζ=1、ωn分別為60和200時,系統的正弦跟蹤響應如圖11所示。由圖11a可看出,傳統PI控制器下的跟蹤誤差為±120 r/min,而新型PI控制器下的跟蹤誤差只有±10 r/min。由圖11b可看出,傳統PI控制器下的跟蹤誤差為±12 r/min,而新型PI控制器下的跟蹤誤差只有±1 r/min。新型PI控制器下仍存在較小的跟蹤誤差而不是理論情況下的零,這是由于實際系統中存在摩擦轉矩等負載擾動。對比圖11a和圖11b可看出,增大ωn盡管提高了系統的抗擾性能,但同時也增大了系統的噪聲,與理論分析結果一致,進一步驗證了理論分析的正確性。
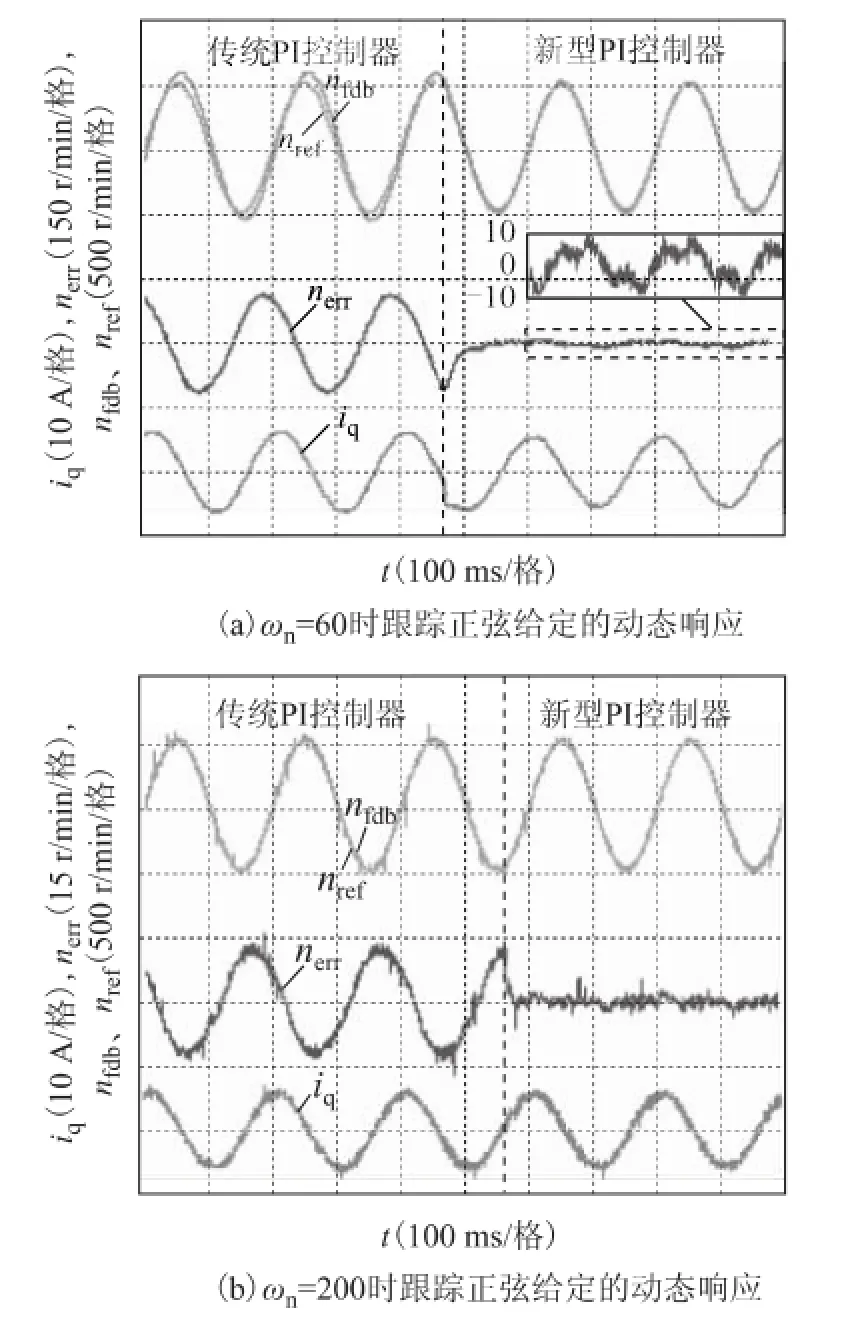
圖11 跟蹤正弦給定時的動態響應Fig.11 Dynamic response of tracking sine reference
給定階躍轉速800 r/min,安排過渡時間T分別為0.15 s、0.10 s和0.05 s的3種過渡過程,ζ=1,ωn= 60,傳統PI控制系統和新型PI控制系統下的空載起動實驗波形如圖12所示。由圖12可看出,傳統PI控制系統在T分別為0.15 s、0.10 s和0.05 s時的超調量分別為10%、10%和5%,新型PI控制系統在T為0.15 s時的超調量約為0.4%,在T分別為0.10 s和0.05 s時均無超調。新型PI控制系統在T為0.15 s時存在超調是由控制量飽和導致的,不過此超調量相比于傳統PI控制器下的10%小得多。以上結果驗證了安排過渡過程的有效性。


圖12 安排過渡過程時的階躍響應Fig.12 Step response with transient profile
5 結論
針對傳統PI控制器存在參數整定困難、對時變輸入跟蹤性能差等問題,本文基于自抗擾控制器的設計思想提出了PI控制器的一種新設計方法。
新型PI控制器的系數kp、ki與系統階躍響應、抗擾性能以及對時變輸入的跟蹤性能之間的關系非常簡單,易于整定。ζ越大,則系統的階躍響應越快,且超調量越小,對頻率接近ωn的擾動抑制能力越強,但恢復時間越長,且系統對測量噪聲的抑制能力越差;ωn越大,則系統的階躍響應越快,且超調量不受影響,對中低頻擾動的抑制能力越強,但對測量噪聲的抑制能力越差。
對于輸入連續變化的應用場合,由于存在輸入微分前饋環節,新型PI控制器相對于傳統PI控制器具有更好的跟蹤性能。另外,輸入微分前饋環節只是一個微分器,與電動機參數無關,簡化了控制系統的設計。
新型PI控制器下的系統階躍響應仍存在超調,且超調量只與阻尼比有關;盡管通過增大阻尼比可以減小超調量,但并不能消除超調量;系統的階躍響應快速性與抑制噪聲性能之間存在矛盾,抗擾性能與抑制噪聲性能之間也存在矛盾。
通過安排過渡過程,將階躍輸入變為連續變化輸入,從而可以消除階躍響應的超調,另外還可以提高系統階躍響應對控制參數的不敏感性。
[1]王江,王靜,費向陽.永磁同步電動機的非線性PI速度控制[J].中國電機工程學報,2005,25(7): 125-130.
Wang Jiang,Wang Jing,Fei Xiangyang.Nonlinear PI speed control of permanent magnetic synchronous motor [J].ProceedingsoftheCSEE,2005,25(7): 125-130.
[2]王瑞萍,皮佑國.基于分數階PI速度控制器的永磁同步電動機控制[J].電工技術學報,2012,27 (11):69-75.
Wang Ruiping,Pi Youguo.Fractional-order PI speed controllerfor permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society,2012,27(11):69-75.
[3]李虹,尚佳寧,陳姚,等.基于fal函數的非線性PI控制器在DC-DC變換器中的應用.電工技術學報,2014,29(S1):326-331.
LiHong,ShangJianing,ChenYao,etal.The applications of nonlinear PI cotroller based on the fal function in the DC-DC converter[J].Transactions of ChinaElectrotechnicalSociety, 2014, 29(S1): 326-331.
[4]魯文其,胡育文,梁驕雁,等.永磁同步電機伺服系統抗擾動自適應控制[J].中國電機工程學報,2011,31(7):75-81.
Lu Wenqi,Hu Yuwen,Liang Jiaoyan,et al.Antidisturbanceadaptivecontrolforpermanentmagnet synchronous motor servo system[J].Proceedings of the CSEE,2011,31(7):75-81.
[5]梁驕雁,胡育文,魯文其.永磁交流伺服系統的抗擾動自適應控制[J].電工技術學報,2011,26 (10):174-180.
LiangJiaoyan, HuYuwen, LuWenqi.Antidisturbance adaptive control of permanent magnet AC servo system[J].Transactions of China Electrotechnical Society,2011,26(10):174-180.
[6]張洪帥,王平,韓邦成.基于模糊PI模型參考自適應的高速永磁同步電機轉子位置檢測[J].中國電機工程學報,2014,34(12):1889-1896.
Zhang Hongshuai,Wang Ping,Han Bangcheng.Rotor position measurement for high-speed permanent magnet synchronous motorsbasedonfuzzyPIMRAS[J]. Proceedings of the CSEE,2014,34(12):1889-1896.
[7]黃佳佳,周波,李丹,等.滑模控制永磁同步電動機位置伺服系統抖振[J].電工技術學報,2009,24 (11):41-47.
Huang Jiajia,Zhou Bo,Li Dan,et al.Sliding mode control for permanent magnet synchronous motor servo system[J].TransactionsofChinaElectrotechnical Society,2009,24(11):41-47.
[8]韓京清.自抗擾控制技術—估計補償不確定因素的控制技術[M].北京:國防工業出版社,2008.
[9]LiShihua,XiaCunjian,ZhouXuan.Disturbance rejectioncontrolmethodforpermanentmagnet synchronousmotorspeed-regulationsystem[J]. Mechatronics,2012,22(6):706-714.
[10]Li Shihua,Liu Huixian,Ding Shihong.A speed control for a PMSM using finite-time feedback control and disturbancecompensation[J].Transactionsofthe Institute of Measurement and Control,2010,32(2): 170-187.
[11]李世華,丁世宏,都海波,等.非光滑控制理論與應用[M].北京:科學出版社,2013.
[12]Li Keyu.PID tuning for optimal closed-loop performance withspecifiedgainandphasemargins[J].IEEE Transactions on Control Systems Technology,2012,21 (3):1024-1030.
[13]王莉娜,朱鴻悅,楊宗軍.永磁同步電動機調速系統PI控制器參數整定方法[J].電工技術學報,2014,29(5):104-117.
Wang Lina,ZhuHongyue,YangZongjun.Tuning method for PI controllers of PMSM driving system[J]. Transactions of China Electrotechnical Society,2014,29(5):104-117.
[14]Lidozzi A,Solero L,Crescimbini F,et al.Direct tuning strategy for speed controlled PMSM drives[C]// IEEE International Symposium on Industrial Electronics (ISIE),Bari,2010:1265-1270.
[15] 黃科元,周滔滔,黃守道,等.永磁伺服系統基于微分自適應補償的快速無超調控制策略[J].電工技術學報,2014,29(9):137-144.
Huang Keyuan,Zhou Taotao,Huang Shoudao,et al. Non-overshoot and fast response control of PMSM servo system based on differential adaptive compensation[J]. Transactions of China Electrotechnical Society,2014,29(9):137-144.
[16] 孫彪,孫秀霞.離散系統最速控制綜合函數[J].控制與決策,2010,25(3):473-477.
SunBiao,SunXiuxia.Optimalcontrolsynthesis functionofdiscrete-timesystem[J].Controland Decision,2010,25(3):473-477.
左月飛男,1989年生,博士研究生,研究方向為永磁同步電機伺服系統控制。
E-mail:zuo@nuaa.edu.cn(通信作者)
劉闖男,1973年生,教授,博士生導師,研究方向為現代交流調速、開關磁阻電機、航空航天電源系統、新能源發電等技術。
E-mail:lc@nuaa.edu.cn
A Novel Design Method of PI Controller for Permanent Magnetic Synchronous Motor Speed Servo System
Zuo YuefeiLiu ChuangZhang JieFu HuiZhang Tao
(College of AutomationNanjing University of Aeronautics and AstronauticsNanjing210016China)
A novel design method of the PI controller is proposed in this paper.The controller lumps various known and unknown quantities that affect the system performance into a total disturbance,simplifies the system model,and then uses the integrator as an observer to realize total disturbance estimation and rejection.The parameters in the novel PI controller have simple relationship with system performance,and are easy to tune.With the input derivative feedforward(IDF)used in the novel PI controller,better performance of tracking the continuous varying input can be obtained.The IDF is just a differentiator irrelative to the parameters of the permanent magnetic synchronous motor(PMSM),which further simplifies the controller design process.The discrete fastest tracking differentiator(DFTD)is used to diminish the overshoot in the step response,which improves the parameter insensitivity of the system at the same time.Extensive experiments are performed to verify the validity of the proposed algorithm.
Permanent magnetic synchronous motor,PI controller,parameter tunning,continuously varying input,input derivative feedforward,transient profile
TM351
國家自然科學基金(51377076)、江蘇省“六大人才高峰”項目(YPC13013)和江蘇省產學研資金(BY2014003-09)資助。
2015-03-27改稿日期 2015-05-24
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32