帶終端角度約束的飛行器三維制導控制一體化設計
2016-08-09 18:54:16劉曉東黃萬偉王丹曄杜立夫
航天控制 2016年2期
劉曉東 黃萬偉 王丹曄 杜立夫
北京航天自動控制研究所, 北京 100854
?
帶終端角度約束的飛行器三維制導控制一體化設計
劉曉東 黃萬偉 王丹曄 杜立夫
北京航天自動控制研究所, 北京 100854

針對帶終端角度約束的STT飛行器,提出一種三維制導控制一體化設計方法。首先,推導出面向三維制導控制一體化設計的非線性數學模型。然后,針對一類多變量非線性系統,構造了一種魯棒動態逆設計方法。結合魯棒動態逆和反演設計方法,完成了制導控制一體化算法的初步設計。最后,針對傳統反演法帶來的“計算膨脹”問題以及非線性補償項引發的控制量抖動問題,對已完成的初步算法做進一步改進。仿真結果表明,所提出的三維制導控制一體化算法可確保飛行器的穩定飛行與精確制導,滿足終端角度的約束要求,并且具備針對參數不確定性的強魯棒性。 關鍵詞 制導控制一體化;三維制導;動態逆控制;動態面控制;反演法
隨著現代科技與軍事技術的進步,精確制導的需求與日俱增,末制導技術被廣泛應用于需要攔截或精確打擊目標的領域[1],包括防空導彈、反艦導彈、彈道導彈、攻擊型無人機和高超聲速飛行器等,如何進一步提高末制導階段制導控制系統的綜合性能成為亟需解決的重要問題。飛行器制導控制系統的傳統設計方法都是基于頻譜分離的思想,將制導回路和控制回路分開設計。盡管這種傳統分離設計方法在過去被證明是有效的,但它并不總能協調好各子系統之間的關系,會導致制導與控制之間缺乏有機的協調匹配性,不能充分發揮飛行器的最大潛力。
制導控制一體化的初步設計理念是由Williams等人[2]于1983年提出的,其宗旨是將制導分系統與控制分系統視為一個整體系統,然后直接針對這個整體系統進行制導控制律的設計。此方法可以在很大程度上提高制導分系統與控制分系統的協調匹配程度,并且改善飛行器的飛行品質。在之后的30多年,經過國內外學者的不懈努力,飛行器制導控制一體化技術已經取得了一定的研究成果。文獻[3-5]針對縱向平面內的制導控制一體化問題進行了相關的研究,相比傳統的分離設計方法,所研究的一體化方案可使飛行器在縱向平面內具有更好的性能。然而,實際上飛行器通道運動之間存在耦合關系,僅靠單平面的制導控制一體化技術并不能有效地解決這一問題。于是,一些學者便開始關注三維制導控制一體化設計方法的研究,以同時提高飛行器三通道運動之間的協調匹配性。以自尋的導彈為研究對象,文獻[6]在模型精確已知的前提下,設計了一種基于反饋線性化的三維制導控制一體化算法。文獻[7]給出了一種基于微分幾何和特征結構配置的一體化設計方法,以保證導彈能夠垂直命中目標。文獻[8]通過求解一個依賴于狀態的Riccati方程得到三維制導控制一體化的最優設計。然而,如上的三維制導控制一體化設計方法均以模型精確已知為前提,并且借助于復雜的計算過程。為了進一步研究魯棒性更高、實用性更強的三維一體化設計方案,文獻[9-10]將STT飛行器的制導控制設計模型寫為分塊級聯的形式,然后針對每一個子系統,分別設計具有魯棒性能的控制律,最后利用反演或動態面控制方法完成子系統間的關聯,但研究中沒有涉及終端角度的控制問題。
相比傳統反演法,動態面控制方法通過引入若干組低通濾波器避免了對虛擬指令的直接微分,從而有效克服了前者帶來的“計算膨脹”問題[11]。基于此,本文將從動態面分塊設計的角度出發,并考慮終端角度的約束要求,構造一種具有強魯棒性能的三維制導控制一體化設計方法。
1 數學建模
假設飛行器在末制導階段的速度變化范圍不大,設計過程中可將該變化視為系統不確定性。根據慣性坐標系、視線坐標系以及彈道坐標系之間的轉化關系,可得到視線坐標系內飛行器—目標點的三維相對運動方程組[12]:
(1)
關于文中各變量的具體定義可參考文獻[12]。
根據飛行器末段飛行環境的特點,可建立彈道坐標系下飛行器質心運動的動力學方程:
(2)
根據式(1)~(2),可進一步得到視線高低角速度和視線方位角速度的微分方程組:
(3)
式中,fn=cosθcosq1+sinθsinq1cos(q2-φc),Δq1和Δq2表示系統不確定性。模型式(3)避免了文獻[9]中視線坐標系與速度坐標系近似重合的假設條件,從一定程度上提高了本文方法的通用性。
對于STT飛行器對象,其無動力飛行的姿態運動方程組可以表述為:
(4)
式中,飛行器的氣動力和氣動力矩均是關于飛行狀態的非線性函數。由式(1)~(4)構成的非線性系統階數較高,結構較復雜,不宜直接應用于后續的設計,因此要將其進行簡化處理,使之有利于制導控制一體化算法的設計。
首先,對于STT飛行器,可通過姿態控制實現速度傾側角γc≈0,于是式(3)可以改寫為:
(5)
其次,為了便于制導控制一體化算法的設計,將氣動力Y和側向力Z表示為如下的簡化形式:
(6)
式中,Yd和Zd表示氣動力建模誤差。同理,將氣動力矩Mx1,My1和Mz1擬合為如下的復合形式:
(7)
由式(4)~(7),將三維制導控制一體化設計模型表示為具有嚴格反饋形式的狀態空間表達式:
(8)




2 三維制導控制一體化算法設計
2.1 魯棒動態逆設計
對于多變量非線性系統:

(9)
式中,G(x)是非奇異矩陣,若設計如下的非線性動態逆控制律:

W是正定矩陣
(10)
則可保證系統式(9)的實際狀態向量x趨近于期望狀態向量xd。
但是,當考慮非線性系統中的不確定性因素時,即考慮如下的非線性系統:

(11)
若仍采用動態逆控制律式(10),非線性系統的跟蹤性能會受到不確定性因素的影響,即傳統的動態逆控制具有魯棒性不強的缺點,因此還需要對其作進一步的改進。

(12)
當滿足κ>Δ時,可實現非線性系統式(11)的魯棒狀態跟蹤。
利用Lyapunov穩定性分析方法容易證明定理1,具體過程在此不再給出。
2.2 基于魯棒動態逆的反演一體化算法
針對一體化設計模型式(8),可以設計基于魯棒動態逆的反演一體化算法如下:
(13)
式中,C,W0,W1和W2均為正定對角陣,κ0,κ1和κ2均為正數。
2.3 基于魯棒動態逆的動態面一體化算法
為了避免傳統反演方法中連續微分帶來的“計算膨脹”問題,可以進一步引入動態面控制方法。于是,下面給出基于魯棒動態逆的動態面一體化算法:
(14)
式中,正定對角陣η1和η2為濾波器系數矩陣。
因為控制律式(14)中含有非線性項df(si) (i=0,1,2),故容易引發控制量的高頻抖動現象。為了克服此問題,并保證方法簡單易行,可將非線性函數用如下的連續函數替代:
(15)
可以證明,相比制導控制一體化初步算法式(13),采用制導控制一體化改進算法式(14)~(15)時,在滿足相同的條件下,制導控制系統的Lyapunov漸近穩定性將退變為Lyapunov有界穩定性。
3 仿真結果
仿真中,STT飛行器對象采用文獻[9]提供的數學模型。而且,本文制導控制一體化算法的參數選取如下:
W0=diag{10,10},C=diag{5,6},
W1=diag{60,60,60},W2=diag{100,100,100},
η1=diag{0.002,0.002},
η2=diag{0.002,0.002,0.002},
κ0=3,κ1=κ2=20,σ0=σ1=σ2=0.1
同時,考慮到實際工程情況,將各舵偏角限制在±35°之間。
仿真中考慮標稱和上、下限偏差組合情況,即參數不確定性系數Np分別為0,1和-1三種仿真情況,下面給出飛行器-目標相對距離R、彈道傾角θ、彈道偏角φc以及速度傾側角γc曲線。
根據圖1~ 4分析可知,本文的一體化制導控制方案可以滿足飛行器制導精度(包括落點、落角精度等)和控制精度(包括速度傾側角誤差等)的雙重指標要求。
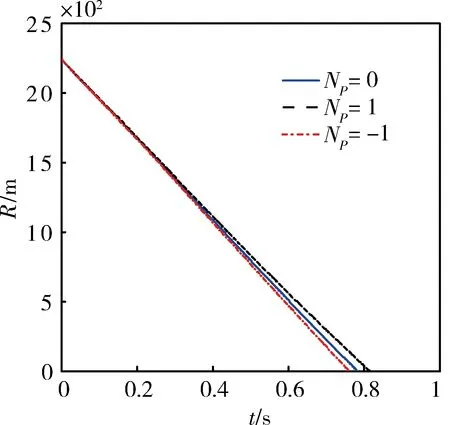
圖1 飛行器-目標相對距離曲線
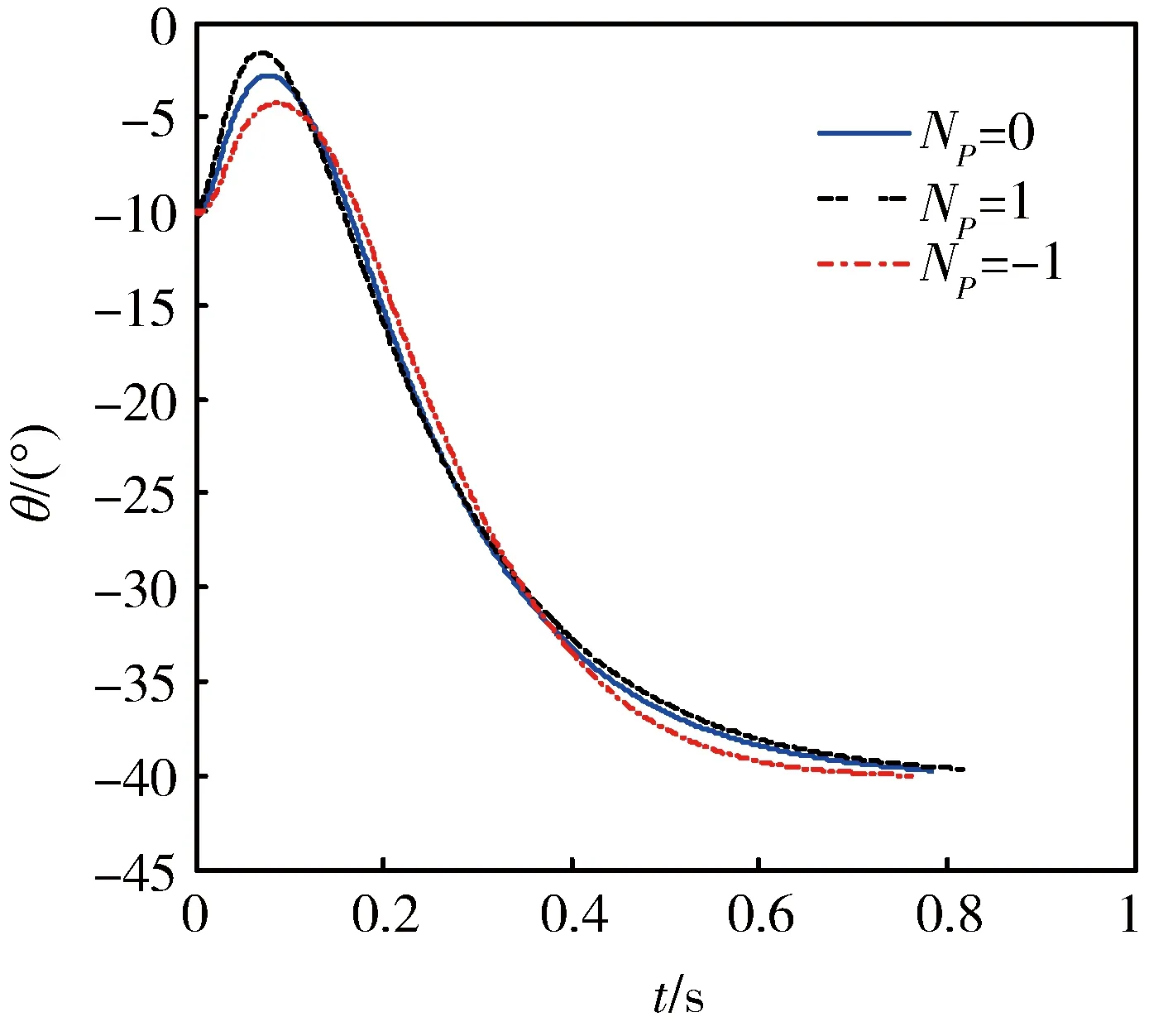
圖2 彈道傾角曲線

圖3 彈道偏角曲線
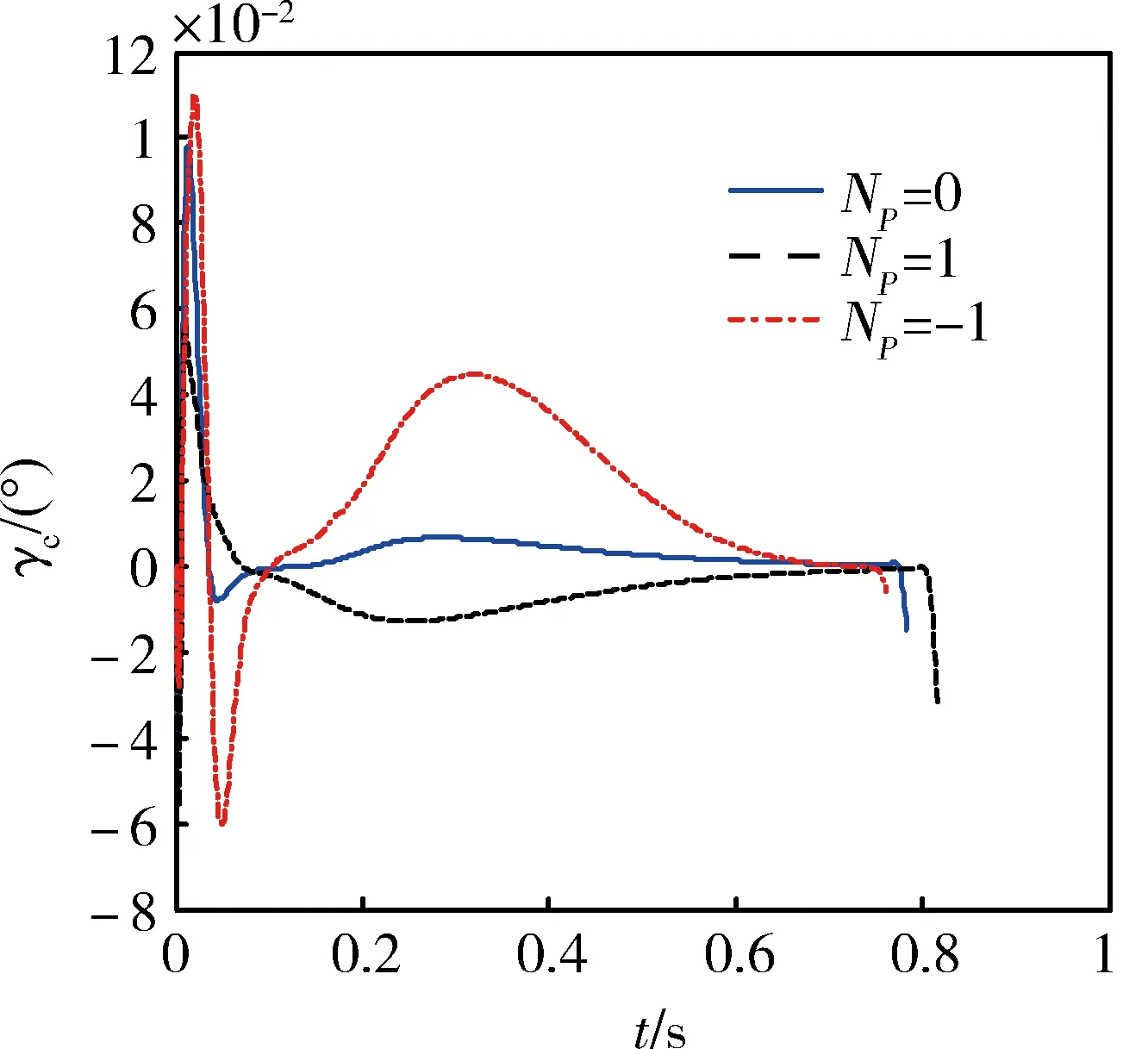
圖4 速度傾側角曲線
此外,由仿真結果可知,所研究飛行器的其它飛行狀態都是穩定的,并且滿足一定的過程約束要求。
4 結論
針對一類STT飛行器對象,本文介紹了一種基于魯棒動態逆和動態面分層設計理論的三維制導控制一體化設計方法,用以提高飛行器質心運動與繞質心運動的協同匹配性。計算機仿真結果表明,本文提出的三維制導控制一體化算法可以確保飛行器在穩定飛行前提下滿足終端落點和終端角度的指標要求。而且,所設計的一體化制導控制系統具備針對參數不確定因素的強魯棒性。
[1] 姚郁,鄭天宇,賀風華,等.飛行器末制導中的幾個熱點問題與挑戰[J].航空學報, 2015, 36(8): 2696-2716.(Yao Yu, Zheng Tianyu, He Fenghua, et al. Several Hot Issues and Challenges in Terminal Guidance of Flight Vehicles[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(8): 2696-2716.)
[2] Williams D E, Richman J, Friedland B. Design of an Integrated Strapdown Guidance and Control System for A Tactical Missile[C]. AIAA Guidance and Control Conference, 1983: 57-66.
[3] Shima T, Idan M, Golan O M. Sliding-Mode Control for Integrated Missile Autopilot Guidance[J]. Journal of Gui-
dance, Control, and Dynamics, 2006, 29(2): 250-260.
[4] Hou M Z, Duan G R. Integrated Guidance and Control of Homing Missiles Against Ground Fixed Targets[J]. Chinese Journal of Aeronautics, 2008, 21(2): 162-168.
[5] Wang X H, Wang J Z. Partial Integrated Missile Guidance and Control with Finite Time Convergence[J]. Journal of Guidance, Control, and Dynamics, 2013, 36(5): 1399-1409.
[6] Menon P K, Ohlmeyer E J. Integrated Design of Agile Missile Guidance and Autopilot Systems[J].Control Engineering Practice, 2001, 9(10): 1095-1106.
[7] 尹永鑫,楊明,王子才.導彈三維制導控制一體化設計[J].電機與控制學報, 2010, 14(3): 87-91.(Yin Yongxin, Yang Ming, Wang Zicai. Three-Dimensional Guidance and Control for Missile [J]. Electric Machines and Control, 2010, 14(3): 87-91.)
[8] Palumbo N F, Reardon B E, Blauwkamp R A. Integrated Guidance and Control for Homing Missiles[J]. Johns Hopkins APL Technical Digest, 2004, 25(2):121-139.
[9] Hou M Z, Liang X L, Duan G R. Adaptive Block Dynamic Surface Control for Integrated Missile Guidance and Autopilot[J]. Chinese Journal of Aeronautics, 2013, 26(3): 741-750.
[10] 薛文超,黃朝東,黃一.飛行制導控制一體化設計方法綜述[J]. 控制理論與應用, 2013, 30(12): 1510-1519.(Xue Wenchao, Huang Chaodong, Huang Yi. Design Methods for the Integrated Guidance and Control System [J]. Control Theory and Applications, 2013, 30(12): 1510-1519.)
[11] Swaroop D, Hedrick J K, Yip P P, et al. Dynamic Surface Control for a Class of Nonlinear Systems[J]. IEEE Transactions on Automatic Control, 2000, 45(10): 1893-1899.
[12] Liu X D, Xiong S F, Huang W W, et al. Mathematical Modeling Facing to Three-Dimensional Integrated Guidance and Control for STT Aircraft[C]. IEEE International Conference on Mechatronics and Control, 2014: 443-448.
Aircraft Three-Dimensional Integrated Guidance and Control Design Containing Terminal Angle Constraints
Liu Xiaodong, Huang Wanwei, Wang Danye, Du Lifu
Beijing Aerospace Automatic Control Institute, Beijing 100854, China
Aimingattheslide-to-turn(STT)aircraftconstrainedbyterminalangles,athree-dimensionalintegratedguidanceandcontrol(3D-IGC)designapproachisimplemented.Firstly,anonlinearmathematicalmodelorientedto3D-IGCdesignisdeduced.Secondly,regardingaclassofmulti-variablenonlinearsystem,arobustdynamicinversioncontrolmethodisestablished.Bycombingwithbacksteppingmethod,theinitialdesignof3D-IGClawisfinished.Finally,inordertoavoidtheproblemsof“explosionofterms”andhigh-frequencychatteringincontrolquantities,whichareresultedfromthetraditionalinversioncontrolmethodandthenonlinearcompensationtermrespectively,thefurtherimprovementontheas-built3D-IGClawisimplemented.Thesimulationresultspresentthattheproposed3D-IGClawcanguaranteethestableflightandaccurateguidanceofresearchedaircraftandalsosatisfytheconstrainedconditionsofterminalangles.Furthermore,itpossessesstrongrobustnessagainstparameteruncertainties.
Integratedguidanceandcontrol;Three-dimensionalguidance;Dynamicinversioncontrol;Dynamicsurfacecontrol;Backstepping
2015-07-06
劉曉東(1987-),男,山東濰坊人,博士,工程師,主要研究方向為飛行器制導與控制技術、伺服系統控制技術等;黃萬偉(1970-),男,湖南醴陵人,博士,研究員,主要研究方向為飛行器先進控制理論與應用、導航與制導技術等;王丹曄(1984-),女,山西人,碩士,工程師,主要研究方向為飛行器制導等;杜立夫(1985-),男,遼寧人,博士研究生,主要研究方向為飛行器姿態控制等。
TJ765.2
A
1006-3242(2016)02-0003-06
