高超聲速再入飛行器抗飽和控制系統(tǒng)設計*
2016-08-09 18:54:18杜立夫蔡高華黃萬偉王丹曄
航天控制 2016年2期
杜立夫 蔡高華 黃萬偉 王丹曄
北京航天自動控制研究所,北京100854
?
高超聲速再入飛行器抗飽和控制系統(tǒng)設計*
杜立夫 蔡高華 黃萬偉 王丹曄
北京航天自動控制研究所,北京100854

針對高超聲速再入飛行器縱向靜不穩(wěn)定模型,在考慮氣動執(zhí)行機構飽和非線性特性的情況下,研究了一種基于補償方案的抗飽和控制系統(tǒng)設計方法。該方法把系統(tǒng)輸入飽和特性視為不確定性,采用H∞回路成形技術設計了標稱控制器;然后針對標稱控制器與被控對象所組成的閉環(huán)系統(tǒng)進行補償器設計;最后基于高超聲速再入飛行器縱向靜不穩(wěn)定模型驗證了該補償方案的有效性。 關鍵詞 高超聲速;再入飛行器;輸入飽和;扇形界;線性矩陣不等式;抗飽和補償器
飛行器控制系統(tǒng)設計過程中,執(zhí)行機構的飽和非線性特性可能是最需要關注和考慮的,執(zhí)行機構的飽和特性會降低控制系統(tǒng)的性能,甚至使系統(tǒng)失穩(wěn)。針對此類問題,設計抗飽和補償器是一種較常見的方法。抗飽和補償方法在忽略飽和非線性的情況下設計一個標稱控制器,然后設計抗飽和補償器來減小忽略飽和特性對閉環(huán)系統(tǒng)帶來的負面影響。采用該方法可以在考慮控制輸入飽和特性的情況下保證閉環(huán)系統(tǒng)的穩(wěn)定性,達到期望的設計需求。
早期的抗飽和控制技術一般缺少嚴密的穩(wěn)定性分析與清晰的系統(tǒng)性能分析,并且控制器求解過程比較繁瑣[1-2]。文獻[3]采用擴展的圓準則給出了一種基于線性矩陣不等式的靜態(tài)補償算法,但是該方法只是針對開環(huán)穩(wěn)定系統(tǒng)提出的,限制了其工程適應性,但是對于系統(tǒng)靜不穩(wěn)定的情況,無法保證系統(tǒng)的全局穩(wěn)定[4-5]。文獻[6]針對穩(wěn)定模型設計了基于LMI的動態(tài)補償器,保證了系統(tǒng)穩(wěn)定,并保證系統(tǒng)輸出對外部干擾具有L2增益的魯棒性。Hencey等[7-9]利用LMI區(qū)域法研究了抗飽和穩(wěn)定問題。
本文針對高超聲速再入飛行器引入了抗飽和補償控制系統(tǒng)的設計方法。首先,給出高超聲速再入飛行器的縱向通道模型,其次,采用扇形界約束條件描述了控制輸入的飽和特性,并進行了考慮執(zhí)行機構飽和特性情況下的系統(tǒng)魯棒穩(wěn)定性與性能分析,給出了補償控制器的存在條件與構造方法,最后,采用高超聲速再入飛行器縱向通道動力學模型對該方法的合理性與有效性進行了仿真驗證。
1 高超聲速飛行器縱向運動模型與氣動特性分析
考慮地球曲率半徑與地球自轉,高超聲速再入飛行器縱向通道非線性動力學模型如式(1)所示[10-11]:
(1)
針對高超聲速再入飛行器縱向通道非線性動力學模型,進行小擾動線性化,得到系統(tǒng)縱向通道線性動力學方程為:

(2)
其中,模型系統(tǒng)矩陣與控制矩陣中各項系數表達式如下所示:



(3)

可見,對于高超聲速再入飛行器俯仰動力學模型而言,系統(tǒng)靜不穩(wěn)定。下面將在考慮氣動執(zhí)行機構飽和特性的情況下,給出補償控制器的設計過程。
2 考慮執(zhí)行機構飽和特性情況下的系統(tǒng)魯棒性能分析
定義u為控制系統(tǒng)的連續(xù)輸入量,umax為執(zhí)行機構飽和值,飽和函數sat(·)定義為:
(4)
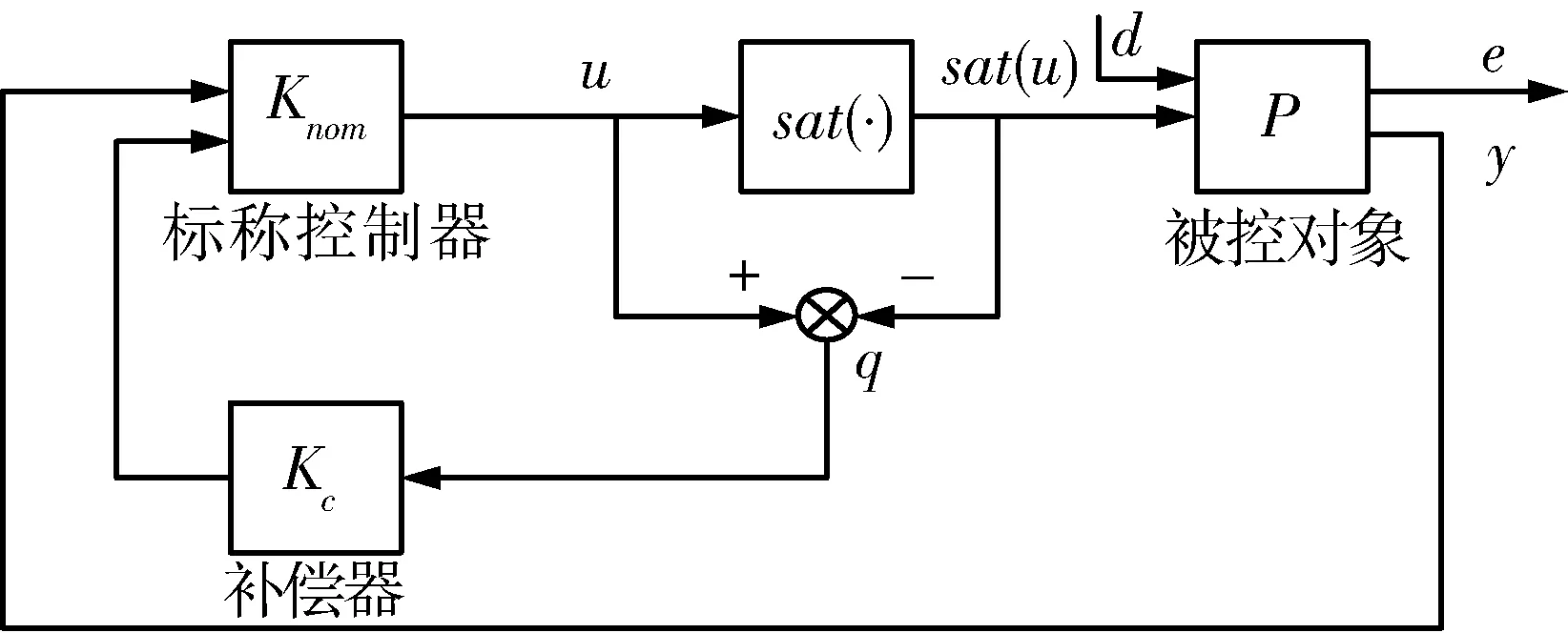
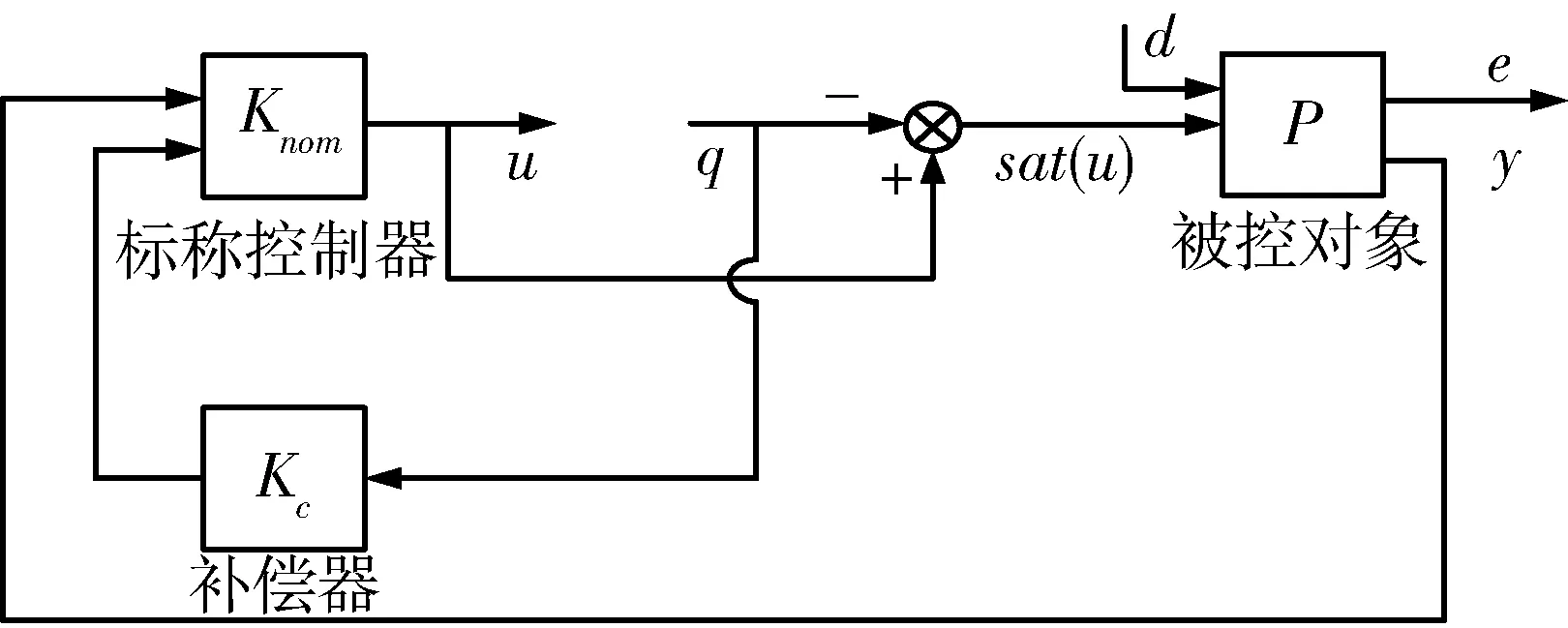
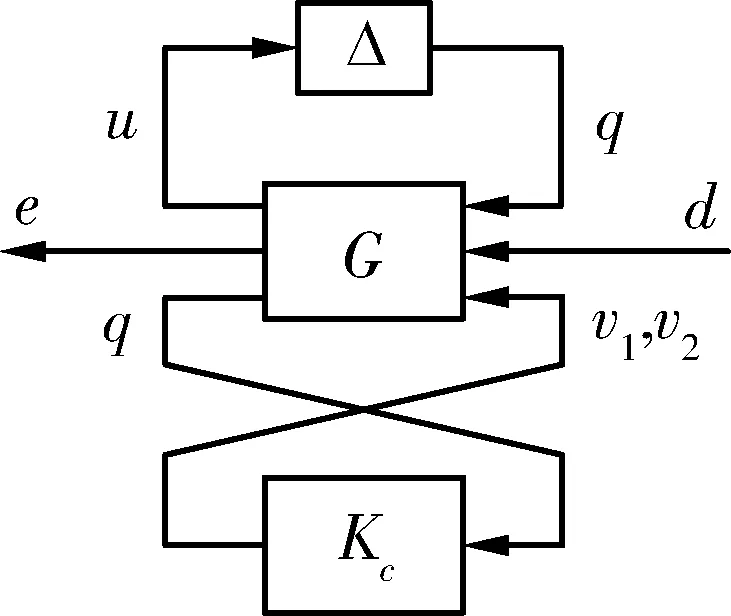
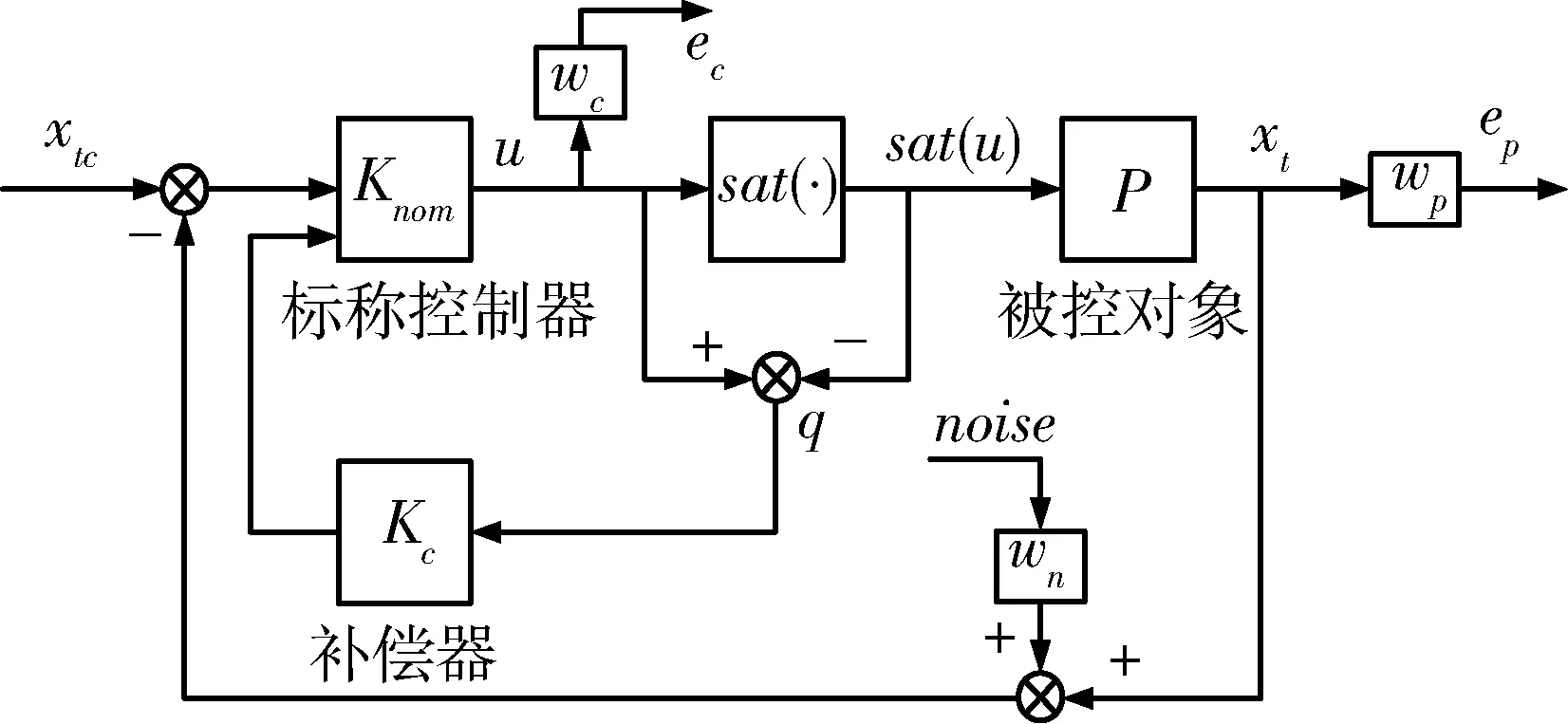
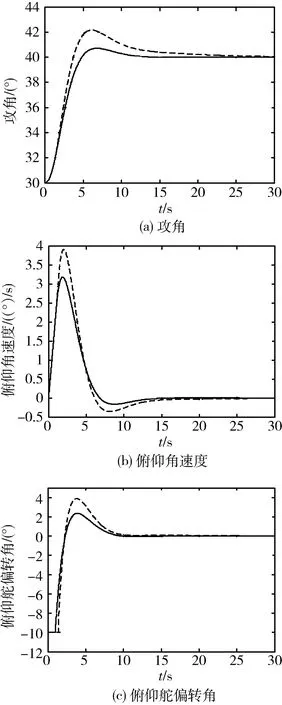
定義σ(u)=sat(u)為具有飽和特性的系統(tǒng)輸入;q=u-sat(u)為系統(tǒng)飽和輸入引起的誤差,q滿足q=ψ(u),其中ψ為扇形界不確定性算子,ψ∈sect [0K],K=diag{k1,k2,...,knu},0 qTT(u-q)≥0 (5) 考慮如下所示具有扇形不確定性的線性時不變系統(tǒng): (6) 其中,x∈Rn是系統(tǒng)狀態(tài),d∈Rnd是外界擾動輸入,e∈Rne是控制輸出。 對于線性不確定系統(tǒng)式(5)和(6),下面的定理[5]可決定其魯棒穩(wěn)定性與魯棒性能,該定理可由Lyapunov穩(wěn)定性理論與Schur補引理得到。 <0 (7) 考慮如下所示的線性時不變被控對象P: (8) 其中,xp∈Rnp是被控對象狀態(tài),y∈Rny是量測輸出,σ(u)∈Rnu是考慮飽和特性的系統(tǒng)輸入,e∈Rne是外界輸出,d∈Rnd是外界輸入。在這里,假設系統(tǒng)滿足如下3個條件: 1) (Ap,Bp2,Cp2)可鎮(zhèn)定可觀測; 3)Dp22=0。 圖1 控制結構框圖 圖2 控制結構框圖 圖3 控制結構一般框圖 本文的控制結構框圖如圖1所示,對圖1進行等效轉換,得到控制結構等效框圖如圖2所示。在忽略飽和非線性的情況下,首先設計標稱控制器Knom,該標稱控制器設計可以采用一般的線性控制系統(tǒng)設計方法,所設計的標稱控制器Knom在忽略輸入飽和特性的情況能穩(wěn)定開環(huán)系統(tǒng)P,且決定著系統(tǒng)的性能指標。假設該標稱控制器存在且具有如下形式: (9) 其中,xk∈Rnk是標稱控制器狀態(tài),v1,v2是由補償器Kc提供的輔助輸入。 設計補償器Kc的目的是在一定的性能指標下,減小輸入飽和非線性對標稱控制器的不利影響。假設所設計的補償器具有如下形式: (10) 其中,xc∈Rnc是補償器狀態(tài)。 將執(zhí)行機構連續(xù)輸入量u與q之間的關系用非線性關系式Δ=(1-σ(u))/u來表示,即q=Δ·u,則圖2所示的控制結構框圖可以轉化為圖3所示的控制結構一般框圖。其中G為不含補償器Kc情況下由開環(huán)系統(tǒng)P與標稱控制器Knom所組成的閉環(huán)系統(tǒng),G的狀態(tài)空間方程如下所示: (11) 其中,x∈Rn,n=np+nk,且: (12) 式(12)中的狀態(tài)空間矩陣可表示為如下形式: (13) 由式(13)可以看出,閉環(huán)狀態(tài)空間矩陣與補償器的狀態(tài)空間矩陣之間存在仿射關系,針對系統(tǒng)式(12)利用定理1給出的系統(tǒng)穩(wěn)定條件,下面的定理[5]給出了補償器的存在條件。 (14) (15) (16) 由定理2得到R11,S與γ之后,定理3給出了 補償器狀態(tài)空間矩陣的構造方法[5]。 定理3 對于給定的R11,S,γ與V=T-1,令MNT=In-RS,其中:M,N∈Sn×np,HT=[Inp0],那么np階補償器可通過下面3個步驟構造得到: (17) (18) (19) (20) 3)最后計算得到補償器狀態(tài)空間矩陣為: (21) 高超聲速再入飛行器縱向通道系統(tǒng)模型標稱控制器與補償器設計框圖如圖4所示,其中:wc是控制加權,wn是噪聲加權,wp是性能加權,xtc是跟蹤指令,noise是外部噪聲。 圖4 標稱控制器與補償器設計框圖 對于飛行器縱向通道系統(tǒng)模型,xtc為攻角跟蹤指令αc,首先設計標稱控制器,采用式(3)中給出的Ma=15處的縱向通道系統(tǒng)線性模型,各加權函數選擇如下: wp=0.2(s+10)/(s+0.01),wc=1/10,wn=0.001。 忽略執(zhí)行機構的飽和非線性特性,采用魯棒控制中的H∞回路成形(Loop Shaping)技術設計標稱控制器,得到縱向標稱控制器為: KL.nom=-3.0742(s+0.3735)/(s+1.567) (22) 選取K=0.994,采用定理3給出的補償器設計方案步驟,得到縱向系統(tǒng)補償器系統(tǒng)矩陣為: 高超聲速再入飛行器縱向通道模型為靜不穩(wěn)定,且飛行器進行大攻角再入飛行,縱向通道的控制目標是在執(zhí)行機構存在飽和的情況下完成攻角指令跟蹤,并且保持高性能的穩(wěn)定飛行。由仿真圖可以看出,通過對標稱控制器加抗飽和補償器與未加補償器的縱向控制系統(tǒng)進行比較,所設計的抗飽和補償器實現了縱向通道的穩(wěn)定飛行,飛行性能得到了提高,攻角的超調量與調節(jié)時間都有所減小,并且俯仰角速度變化反應的動態(tài)過程得以改善,舵偏角進入飽和時間減小,所設計的縱向控制系統(tǒng)實現了較好的控制效果。 圖5 縱向通道控制系統(tǒng)仿真圖 針對高超聲速再入飛行器縱向靜不穩(wěn)定模型,在考慮氣動執(zhí)行機構飽和非線性特性的情況下,研究了一種基于補償方案的控制系統(tǒng)設計方法。采用扇形界約束條件描述了控制輸入的飽和特性,采用H∞回路成形技術設計了標稱控制器,然后針對標稱控制器與被控對象所組成的閉環(huán)系統(tǒng)進行了補償器設計,給出了補償控制器的存在條件與構造方法,并采用高超聲速再入飛行器縱向通道動力學模型對該方法的合理性與有效性進行了仿真驗證。仿真結果表明,所設計的控制系統(tǒng)在控制輸入飽和的情況下對靜不穩(wěn)定系統(tǒng)具有較好的控制性能,有效地提高了系統(tǒng)的動態(tài)響應特性。 [1] Teel A R, Kapoor N. The L2 anti-windup problem: its definition and solution[C]//European Control Conference, 1997. [2] Tyan F, Bernstein D S. Anti-windup compensator synthesis for systems with saturation actuators[J]. International Journal of Robust Nonlinear Control, 1995, 5: 521-537. [3] Mulder E F, Kothare M V, Morari M. Multivariable anti-windup controller synthesisusing linear matrix inequalities[J]. Automatica, 2001, 37: 1407-1416. [4] Teel A R. Anti-windup for exponentially unstable linear systems[J]. International Journal of Robust Nonlinear Control, 1999,9: 701-716. [5] Wu F, Bei L. Anti-windup control design for exponentially unstable LTI systems with actuator saturation[J]. Systems & Control Letters, 2004, 52: 305-322. [6] Grimm G, Hatfield J, Postlethwaite I.Anti-windup for stable linear systems with input saturation: an LMI-based synthesis[J]. IEEE Transactions on Automatic Control,2003,48 (9):1509-1525. [7] Hencey B, Alleyne A G. A KYP lemma for LMI regions[J].IEEE Transactions on Automatic Control, 2007, 52(10): 1926-1930. [8] Hencey B, Alleyne A.An anti-windup technique for LMI regions[J].Automatica, 2009, 45(10): 2344- 2349. [9] Da Silva, Tarbouriech S. Anti-windup design with guaranteed regions of stability: an LMI-based approach[J]. IEEE Transactions on Automatic Control, 2005, 50(1):106-111. [10] Space Division Rockwell International. Aerodynamic design data book, Orbital Vehicle STS-1, Revision M, SD72-SH-0060[R]. November, 1980. [11] Cooke D R. Space Shuttle Stability and Control Test Plan[C]// Proc. of AIAA the 9th Atmospheric Flight Mechanics Conference, 1982. [12] 方振平,陳萬春,張曙光.航空飛行器飛行動力學[M].北京: 北京航空航天大學出版社, 2005.(Fang Z P, Chen W C, Zhang S G. The Flight Dynamics of Aerodynamic Aircraft [M]. Beijing: Beihang University Press, 2005.) [13] 韓崇昭,張愛民,劉曉風.多變量反饋控制分析與設計[M].西安:西安交通大學出版社,2011: 316-330. (Han C Z, Zhang A M, Liu X F.Multivariable Feedback Control: Analysis and Design[M]. Xi’an: Xi’an Jiao Tong University Press,2011:316-330.) Anti-Windup Compensation Control System Design for Hypersonic Reentry Vehicle Du Lifu, Cai Gaohua, Huang Wanwei, Wang Danye Beijing Aerospace Automatic Control Institute, Beijing 100854, China Ageneralizedsaturationcontroltechnologyintheframeworkofanti-windupcompensationisintroducedforthelongitudinalstatic-unstablemodelofhypersonicreentryvehiclecontrollerdesignsubjecttoinputsaturationnonlinearity.Firstly,thelongitudinalofhypersonicreentryvehicleisdescribedandsystemcharacteristicsanalysisarealsoimplemented.Then,robuststabilityandperformanceanalysisofclosed-loopsystemwithsector-boundednonlinearityareprovided,atwo-stepdesignprocedureforanti-windupcompensatorisgiven.Finally,closed-loopcontrolsystemsimulationsbyusingthelongitudinalstatic-unstablemodelofhypersonicreentryvehiclearemadetodemonstratetherationalityandeffectivenessofthegeneralizedanti-windupcontroltechnology. Hypersonic;Reentryvehicle;Inputsaturation;Sector-bounded;Linearmatrixinequality;Anti-windupcompensator *國家自然科學基金(6140355) 2015-06-10 杜立夫(1985-),男,遼寧人,博士研究生,主要研究方向為飛行器控制技術;蔡高華(1987-),男,河南人,博士,工程師,主要研究方向為制導控制系統(tǒng)設計;黃萬偉(1970-),男,湖南人,博士,研究員,主要研究方向為先進控制理論與應用、導航與制導技術等;王丹曄(1984-),女,山西人,碩士,工程師,主要研究方向為制導控制系統(tǒng)設計。 TP273 A 1006-3242(2016)02-0009-06

3 補償器設計








4 高超聲速再入飛行器控制系統(tǒng)設計與仿真驗證

5 結論
