二軸桁架機(jī)器人的設(shè)計及實現(xiàn)
2016-07-29 08:28:47張豪
電子測試 2016年8期
張 豪
(無錫職業(yè)技術(shù)學(xué)院控制技術(shù)學(xué)院,江蘇無錫,214121)
?
二軸桁架機(jī)器人的設(shè)計及實現(xiàn)
張 豪
(無錫職業(yè)技術(shù)學(xué)院控制技術(shù)學(xué)院,江蘇無錫,214121)
摘要:對二軸桁架機(jī)器人的總體設(shè)計進(jìn)行了研究。介紹了二軸桁架機(jī)器人的機(jī)械結(jié)構(gòu)和運(yùn)動方式、PLC控制的工作原理及系統(tǒng)軟硬件設(shè)計。由于二軸桁架機(jī)器人具有高可靠性、高速度、高精度等特點,因此非常適合智能工廠,物流系統(tǒng)行業(yè)的應(yīng)用。
關(guān)鍵詞:二軸桁架機(jī)器人;控制系統(tǒng);可編程序控制器;伺服系統(tǒng);人機(jī)界面
0 引言
桁架機(jī)器人,是能夠?qū)崿F(xiàn)自動控制的、基于空間XYZ直角坐標(biāo)系可重復(fù)編程的、多自由度的、適合不同任務(wù)的自動化設(shè)備。桁架式機(jī)器人改變了傳統(tǒng)的物流方式,有效地改善了作業(yè)環(huán)境,提供零件加工數(shù)字化、信息化、少人化直至無人化管理,可靠地保證了產(chǎn)品質(zhì)量,極大地提高了勞動生產(chǎn)率,將工人從繁重的體力勞動中解放出來,使現(xiàn)代制造技術(shù)達(dá)到一個嶄新的水平。
桁架式機(jī)器人的特點:多自由度運(yùn)動,每個運(yùn)動自由度之間的空間夾角為直角;自動控制的,可重復(fù)編程,所有的運(yùn)動均按程序運(yùn)行;一般由控制系統(tǒng)、驅(qū)動系統(tǒng)、機(jī)械系統(tǒng)、操作工具等組成;靈活,多功能,因操作工具的不同功能也不同;高可靠性、高速度、高精度;可用于惡劣的環(huán)境,可長期工作,便于操作維修;各個機(jī)器人行走軸,均可采用滾動直線導(dǎo)軌或滾輪V型導(dǎo)軌,具有安裝調(diào)試方便,適合長行程應(yīng)用,可用于惡劣環(huán)境等優(yōu)點。
基于智能工廠的最典型的二軸桁架機(jī)器人,提出了機(jī)械結(jié)構(gòu)總體設(shè)計以及控制系統(tǒng)的設(shè)計,經(jīng)過工業(yè)現(xiàn)場實際運(yùn)作良好,同時具備較高的推廣價值和實際意義。
1 二軸桁架機(jī)器人總體概況
如圖1所示,是智能工廠現(xiàn)場的二軸桁架機(jī)器人。

圖1 工業(yè)現(xiàn)場二軸桁架機(jī)器人
1.1桁架機(jī)器人機(jī)械結(jié)構(gòu)
桁架機(jī)器人主要由1-Z軸減速機(jī)組件、2-X軸減速機(jī)組件、3-豎梁組件、4-移動機(jī)構(gòu)組件、5橫梁組件、6-地腳板焊接件、7-V型支架、8-機(jī)器人支架,以及相關(guān)標(biāo)準(zhǔn)件組成,如圖2所示。桁架機(jī)器人通過地腳螺栓固定在工業(yè)現(xiàn)場,機(jī)械手通過X軸作橫向運(yùn)動,Z軸作上升下降的垂直運(yùn)動,X軸的距離表示工件搬運(yùn)的距離,如果工件尺寸大,那么Z軸運(yùn)動的距離可大些,如果工件尺寸小,Z軸運(yùn)動的距離可相對小些。
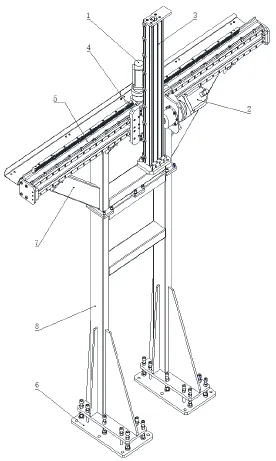
圖2 桁架機(jī)器人機(jī)械結(jié)構(gòu)圖
1.2桁架機(jī)器人主體機(jī)械結(jié)構(gòu)
桁架機(jī)器人主體機(jī)械結(jié)構(gòu)主要由導(dǎo)軌、齒條、橫梁、橫梁驅(qū)動減速機(jī)、滾輪、潤滑輪、信號燈、拖鏈槽、X軸拖鏈、Z軸拖鏈、端蓋/限位器、豎梁、托板、潤滑系統(tǒng)等組成。
2 控制系統(tǒng)設(shè)計
該桁架機(jī)器人控制系統(tǒng)由硬件和軟件兩大部分組成。桁架機(jī)器人控制原理圖,如圖3所示。
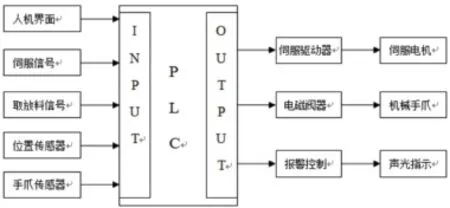
圖3 桁架機(jī)器人控制原理圖
3 結(jié)論
本文根據(jù)智能工廠的生產(chǎn)實際,設(shè)計了二軸桁架機(jī)器人。該機(jī)器人的運(yùn)動空間廣,承載力強(qiáng),能夠滿足工業(yè)現(xiàn)場搬運(yùn)零件的要求。并且對機(jī)器人的機(jī)械結(jié)構(gòu)進(jìn)行了總體設(shè)計,保證了運(yùn)動精度和穩(wěn)定性。最后對機(jī)器人的控制系統(tǒng)進(jìn)行了設(shè)計,以PLC為控制系統(tǒng)的核心,通過控制兩臺伺服驅(qū)動器完成機(jī)器人的Z軸和Z軸控制。實踐表明,以PLC為控制系統(tǒng)的二軸桁架機(jī)器人具有高可靠性、高速度、高精度的顯著特點。此外,該機(jī)器人擁有較高的性價比,在智能工廠,物流系統(tǒng)行業(yè)應(yīng)用前景廣泛。
參考文獻(xiàn)
[1] 王占軍,趙玉剛,劉新玉,直角坐標(biāo)型機(jī)器人機(jī)械結(jié)構(gòu)與控制系統(tǒng)的設(shè)計[J].制造業(yè)自動化,2015(2):18-19.
[2]宣自洋,陳書宏,常凱,基于PLC控制的變速器搬運(yùn)機(jī)械手系統(tǒng)設(shè)計[J].制造業(yè)自動化,2015(2):6-8.
[3]劉全勝,張豪,自動車庫的設(shè)計及實現(xiàn)[J].組合機(jī)床與自動化加工技術(shù),2008(12):86-88
[4]Brugali D, Shakhimardanov A. Component-Based robotic Engineering(Part II) [J].IEEE Robotics & Automation Magazine,2010,10(3):100-112
[5]Ma Q, Zou Y, Zhang T.Study of service robot architecture based on middleware and abstract environment[A].2012 IEEE International Conference on Robotics and Biomimetics. Guangzhou[C].2012:1200-1205.
[6]倪森壽,張豪等,機(jī)械技術(shù)基礎(chǔ)[M],北京:人民郵電出版社,2009
[7]張錚,張豪等,機(jī)電控制與PLC[M],北京:機(jī)械工業(yè)出版社,2008
中圖分類號:TP24
文獻(xiàn)標(biāo)識碼:A
Design and Implementation of Bi-axis Truss Robot
Zhang Hao
(School of Control Technology,Wuxi Institute of Technology,Wuxi,214121,China)
Abstract:The overall design of bi-axis truss robot is studied. Mechanical structure of bi-axis truss robot and the mode of motion,the working principle of PLC control and design for the hardware and software in the kind of system.The bi-axis truss robot can be widely used in the intelligent plant and logistics system industry due to its high reliability,speed and precision.
Keywords:bi-axis truss robot;control system;PLC;servo system;human-computer interface
