便攜式防空導彈作戰指揮系統研究
2016-07-29 08:28:46梅志偉顧浩卿劉鄭州
電子測試 2016年8期
梅志偉,顧浩卿,凌 麗,劉鄭州,陳 志
(上海機電工程研究所,上海,201109)
?
便攜式防空導彈作戰指揮系統研究
梅志偉,顧浩卿,凌 麗,劉鄭州,陳 志
(上海機電工程研究所,上海,201109)
摘要:本文從作戰實際需求出發,分析了便攜式防空導彈在使用過程中存在的不足,提出了開發便攜式防空導彈作戰指揮系統必要性,并介紹了實現的技術方案,最后指出了需要解決的關鍵技術。
關鍵詞:便攜式防空導彈;作戰指揮系統;關鍵技術
0 引言
現代戰爭中,隨著以巡航導彈為代表的現代空襲兵器快速發展,作為承擔低空、超低空防空任務的便攜式防空導彈,所面臨的作戰任務越來越嚴峻,如何在現有條件下進一步提升便攜式防空武器的作戰效能成為廣泛研究的熱點。
1 便攜式防空導彈的優勢與不足
便攜式防空導彈與其它防空武器相比,具有較多優勢:體積小、重量輕、機動靈活、隱蔽性好、操作使用簡便、價格低廉和較強的抗電磁干擾能力。但是,在單兵肩射條件下,便攜式防空導彈在作戰使用中也暴露出諸多不足,包括:
射手發現目標距離近,捕獲目標時間長。目前便攜式防空導彈射手搜索目標主要采取上級概略指示或射手自我搜索的模式,受能見度等天氣因素影響,觀測距離受到很大限制,發現目標需要較長時間。而若想對高速目標形成有效射擊,射手需要在8~10km的距離就要開始發現目標,這對于依靠目視搜索的射手來說,很難做到。由于發現目標距離近,最佳攔截時機容易錯過,甚至出現目標飛出殺傷區的情況。觀測距離嚴重限制了便攜式防空導彈作戰性能的提升,傳統的光學瞄準具和紅外夜視瞄準具雖然在一定程度上提升了射手發現目標的概率,但仍無法及時準確判斷來襲目標的種類、速度和方位等信息。
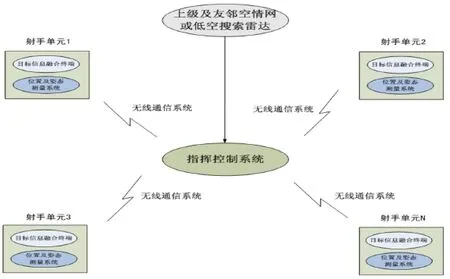
圖1 便攜式防空導彈目標導引指揮系統組成圖
難以協同作戰,火力指揮難度大。作為末端防御武器,便攜式防空導彈承擔了整個防空體系中對目標的最后攔截任務,必須保證有較高的攔截概率。組織和指揮便攜式防空導彈各單元火力進行集火射擊、轉火射擊(單目標多次攔截、多目標分配攔截)是作戰任務完成的重要保障。而單兵分散作戰的方式,彼此間很難協同,與其他防空武器更無法統一指揮,對指揮帶來了不便,不易根據實際情況進行火力分配,會導致攔截效率的降低。
2 便攜式防空導彈作戰指揮系統
為了克服便攜式防空導彈使用過程中存在的不足,充分發揮其自身優勢,需要為單兵射手提供目標的信息指示、目標搜索導引、射擊目標分配等必要信息,以便于射手快速鎖定目標并把握最佳發射時機。更進一步,將探測到的目標飛行諸元與防空導彈實現信息共享,導彈發射前對目標信息進行融合處理,并形成相應的控制策略,有利于提高導彈命中概率和命中精度。
2.1總體方案
要實現為單兵射手提供目標指示、導引、分配及信息共享等功能,需要解決空勤信息接收(或自主探測)、目標分配、信息交互、射手位置信息測量、裝筒彈當前姿態角度測量、空勤提供的目標信息與射手坐標系轉換、裝筒彈指向誤差計算及導引指示等問題。
在實現方式上將以上功能需求分為四大模塊,分別為指揮控制系統、無線通信系統、位置及姿態測量系統和目標信息融合處理終端。
2.2指揮控制系統
指揮控制系統是整個作戰系統的控制中樞,可通過以太網接入上級空情網或友鄰部隊空情網,也可外接低空搜索雷達,接收來襲的目標信息;同時,還可以通過無線數傳電臺接收各射手終端回傳的位置信息、目標指向信息及裝備工作狀態。
指揮控制系統能夠對目標進行敵我識別和威脅判斷,根據威脅程度和射手實際位置,按照最優原則(或手動操作)給不同位置射手進行目標分配/撤銷/更換,并且可以根據戰場實際情況下達目標禁射/恢復射擊等命令。
指揮控制系統由主控計算機主機、顯示控制臺、信息處理軟件和無線收發電臺組成,考慮作戰使用便攜性要求,將該三部分集成為一臺體積適中、重量不大于10kg的便攜式設備。指揮控制系統一般裝備于便攜式防空導彈排,最多可同時給16個射手單元提供目標導引。
2.3無線通信系統
無線通信系統用于連接指揮控制系統與各射手終端,無線通信系統支持TDMA組網方式,支持數話同傳,數傳通信距離不小于5km。
指揮控制系統采用通播的方式每間隔0.5s向各射手終端發送一次數據報文,內容包括:源地址、目的地址、流水號、目標批號、敵我屬性、目標控制指令和目標位置(含目標斜距、方位角和俯仰角)等信息。
各射手終端每間隔1s向指揮控制系統回傳一次數據報文,內容包括:源地址、目的地址、流水號、當前位置信息、當前指向信息(含方位和俯仰方向)、當前工作狀態。
2.4位置及姿態測量
位置測量裝置用于測量射手所在的大地坐標位置,包括經度、緯度和海拔高度信息,并通過無線通信方式上傳至指揮控制系統。
姿態測量裝置與發射筒固連,在使用之前需要對姿態測量裝置進行指北標定,確定方位方向零位;內置的姿態傳感器可以實時測量裝筒彈相對于水平方向的俯仰角和與北向的方位角。位置測量裝置和姿態測量裝置測得的位置和姿態信息統一發送至目標信息融合處理終端。
射手位置和裝筒彈指向姿態測量是系統的關鍵環節,傳感器測量誤差直接影響到射手對目標的瞄準精度。
2.5目標信息融合處理終端
目標信息融合處理終端接收指揮控制系統給出的目標位置信息,并根據射手的位置信息進行解算,將目標位置信息轉換到射手坐標系;同時,根據姿態傳感器輸出的裝筒彈實際高低、方位指向,進行求差計算,并將得到的誤差信號Δx,Δy顯示在終端屏幕上,用于提示和輔助射手轉動裝筒彈瞄準目標。同時,目標信息融合處理終端還可以顯示上級指揮控制系統下達的目標禁射/恢復射擊指令。
2.6目標導引算法
目標搜索雷達提供的空情信息包括:雷達當前位置(經度(LL)、緯度(BL)、高度(HL))、目標位置信息(斜距RL、方位角AL、俯仰角EL);射手終端傳感器測得的位置及姿態信息包括:射手當前位置(經度(LSi)、緯度(BSi)、高度(HSi))、裝筒彈方位指向角()、裝筒彈俯仰指向角()。
將雷達位置信息和射手位置信息按以下公式從大地坐標系轉換到高斯-克呂格平面直角坐標系,分別得到雷達位置坐標(XDL,ZDL),高度為HDL;射手位置坐標(XDS,ZDS),高度為HDS。
轉換公式如下:
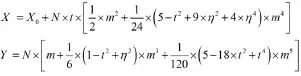
其中,
地球橢球的長半徑 a = 6378245.0000000000 m
地球橢球的短半徑 b = 6356863.0187730473 m

目標位置在以搜索雷達天線陣面中心為原點的大地測量坐標系下的位置用三個坐標分量表示為:
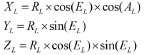
則目標位置在以射手肩部為原點的大地測量坐標系下的坐標分量(XSi,YSi,ZSi)表示如下:

目標的斜距Rsi、方位角Ai、俯仰角Ei為:
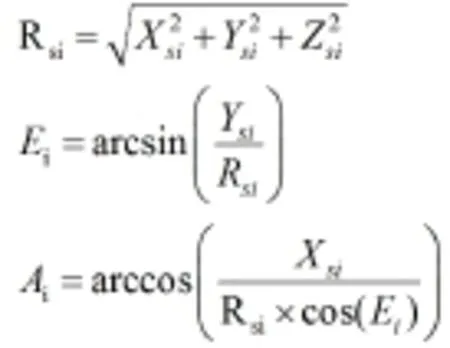
射手對目標的指向誤差為:

3 需要解決的關鍵技術
3.1裝筒彈方位指向測量
一般傳統的方位指向測量通常采用微機械慣組MEMS+GPS為核心的定位定向設備,MEMS為導航計算機提供載體的靜態方位和姿態信息,雙GPS天線可以提供載體準確的靜態方位信息,MEMS+GPS組合提供載體的動態方位和姿態信息;由于射手在作戰準備過程中位置并不固定,且背負裝備體積重量嚴格受限,雙GPS天線測量方位的方案并不適合本系統。
本文提出了采用指北標定的方法,即射手首先通過輔助儀器確定大地坐標系真北方向,然后將裝筒彈對準北向,對傳感器進行零位標定。
3.2目標導引精度
便攜式導彈導引頭視場一般都很小,要想準確捕獲目標,系統的引導誤差應控制在視場范圍內。影響導引精度的誤差分為系統誤差和隨機誤差,系統誤差包括位置及姿態測量裝置結構安裝誤差、位置解算誤差;隨機誤差包括上級空情信息測量誤差、指北零位標定誤差、射手位置測量誤差、裝筒彈姿態測量誤差。受限于體積、重量及成本因素,指北零位標定和姿態測量難以保證很高的精度,是主要的誤差源。
3.3便攜式小型化設計
作戰狀態下,位置及姿態測量系統和目標信息融合終端與裝筒彈為固連狀態,需要射手肩扛,因此,應充分考慮小型化、輕量化設計,以適應單兵攜帶的要求,一般不應超過0.5~1kg。考慮到野外作戰隱蔽性和機動的特點,指揮控制系統由單兵攜帶,其重量設計也應嚴格控制。
4 結束語
便攜式防空導彈作戰指揮系統作為便攜式導彈武器系統的重要補充,可以有效解決單兵肩射面臨的諸多使用方面的不足,提高了武器系統的作戰效能。其輕量化、小型化的特點,符合單兵武器的實際要求;同時,較低的設計成本也很好的滿足了市場的需求。
參考文獻
[1]葉堯卿. 便攜式紅外尋的防空導彈設計[M]. 北京:宇航出版社,1996.
[2]遲剛,王樹宗,便攜式防空導彈反巡航導彈作戰效能分析[J].火力與指揮控制,2004
[3]王艷正,郝 強,龔 旭,馮立東,便攜式地空導彈抗擊武裝直升機作戰效能研究[J],火力與指揮控制,2007
The research of man-portable air defense missile operation command systems
Mei Zhiwei,Gu Haoqing,Ling Li,Liu Zhengzhou,Chen Zhi
(Shanghai Institute of mechanical and electrical engineering, Shanghai, 201109)
Abstract:This article based on the actual requirement of war,analysis the defect of the operation manportable air defense missile,present the necessity of man-portable command systems,finally,give the technical solution and critical technologies.
Keywords:man-portable air defense missile;command systems;critical technologies
