新型適時四驅PHEV系統匹配與控制仿真
2016-07-28 06:44:46陳美奇
廣西大學學報(自然科學版) 2016年3期
馬 超,陳美奇,楊 坤,高 松
(山東理工大學交通與車輛工程學院, 山東淄博255049)
?
新型適時四驅PHEV系統匹配與控制仿真
馬超,陳美奇,楊坤,高松
(山東理工大學交通與車輛工程學院, 山東淄博255049)
摘要:為了更深一步提高插電式混合動力汽車(PHEV)適應復雜行駛環境的能力,根據其工作特點和不同駕駛情況的性能要求,設計開發出一款采用啟動/發電機、兩檔純電驅動模式的新型插電式適時四驅混合動力系統。根據設計需求,對動力部件進行匹配及選型,針對性的開發了整車控制策略。為驗證其性能,利用AVL Cruise搭建其整車動力學模型,基于MATLAB/Simulink開發了動力系統控制模型,采用Stateflow搭建模式切換狀態流圖。通過聯合仿真結果表明:整車動力學系統參數匹配與控制達到設計要求,百公里加速時間達到6.22 s;相比無兩檔自動變速器PHEV,啟動/發電機和兩檔自動變速器的使用使其純電動續駛里程增長了11.49%,最終降低35.43%的使用成本。本研究為此類四驅PHEV系統的開發提供了一套完整的理論與技術,對推動PHEV的發展有著重大的理論和社會意義。
關鍵詞:混合動力汽車;匹配;適時四驅;啟動/發電機;兩檔純電動驅動;控制策略;仿真分析
0引言
環境污染的加劇,霧霾天的出現,進一步激發了民眾對節能減排的要求,國務院于2015年最新發布的《中國制造2025》中,將節能汽車及新能源汽車作為未來發展的重點領域[1]。兼具純電動和混合驅動的插電式混合動力汽車(Plug-in Hybrid Electric Vehicle, PHEV)已成為我國新能源汽車發展重要戰略取向。
插電式混合動力系統充分利用動力電池所提供電能驅動汽車,在中短途距離純電動行駛體現了汽車經濟節能的需求;同時發動機用于增程行駛模式,滿足在長距離行駛需求;兩模式的綜合使用,使PHEV具備了長續駛里程、高燃油效率、低污染排放的特性,在純電動汽車技術仍面臨難點的現在[2],成為了最現實的新能源車型。
現今典型的插電式混合動力汽車中,如豐田普銳斯、通用雪佛蘭沃藍達等多是單軸驅動,此種驅動構型在城市道路行駛中有著良好的表現,具有較好的燃油效率,節能減排效果顯著,但在復雜道路如濕滑或山區等需要較好的驅動能力的場合仍有提升潛力。因此,為了迎合此種需求,韓國成均館大學Donghyun Kim[3]、湖南大學張文超[4]和華南理工大學莫愁等[5]分別對四驅動力系統進行開發及性能仿真,對動力部件進行了匹配及能量管理控制,在動力性和經濟性上取得了較好的提升。加拿大安大略大學Ragheb.H等[6]通過對混合四驅動力汽車和傳統四驅動力汽車爬坡性能仿真研究,結果表明混合四驅動力系統在爬坡性能上優于傳統四驅。合肥工業大學邱利宏等[7]根據四驅混合動力汽車的工作模式,利用基于邏輯門限值的方法制定控制策略實現對汽車的控制,其動力性和經濟性均達到設計指標。基于以上分析,本文提出了一類新型具備啟動/發電機與兩檔式變速器的四輪驅動PHEV系統,并對其進行了匹配設計與開發。首先對如何提出插電式適時四驅混合動力系統構型的設計進行了說明;其次,對適時四驅混合動力系統結構的各驅動部件進行匹配;利用Stateflow搭建狀態流圖,實現適時四驅系統各工作模式的跳轉,通過發動機最佳工作曲線(Optimal Operating Line, OOL)優化發動機的工作[8],最終實現對各個驅動部件扭矩的優化分配;為了驗證此構型,利用AVL Cruise搭建了整車動力學模型,利用MATLAB/Simukink開發了整車控制模型,基于兩者的聯合仿真,對其性能進行了分析與評價。
1整車系統結構設計及動力學分析
1.1插電式適時四驅混合動力汽車構型設計
插電式混合動力系統中擁有兩套獨立的動力源,為方便適時四驅混合驅動系統布置,在前后驅動分別采用不同的驅動源,即前驅為發動機驅動,后驅為電機驅動[9]。
1.1.1純電動后驅
插電式系統主要驅動模式為純電動模式也被稱為電量消耗模式(Charge Depleting,CD),在此過程中主要依靠動力電池為驅動電機提供電能驅動汽車后輪行駛。雖然純電動可以實現汽車零排放同時滿足汽車在短途面對復雜工況行駛的要求,但是研究表明純電動行駛模式下傳動系統中檔位數對電機的工作效率和功率輸出性能具有一定的影響[10],基于此考慮,本設計系統在電機后輪驅動模式下采用兩檔自動變速器來提高電機性能,在相對小的增加整車復雜度的同時提升電機的工作效率和增加純電動模式下的續駛里程[11]。
1.1.2發動機前驅
在動力電池電量相對較低的情況下,整車驅動進入增程模式也叫電量維持模式(Charge Sustaining,CS),發動機作為主要的能量源驅動汽車前輪行駛。由于發動機工作區域的好壞對整車經濟性能有著極大的影響,同時發動機怠速運轉也會增加額外的燃油消耗[12],為了減小這部分消耗,本設計引用啟動/發電機的概念[13-14],取消發動機的起動機,在飛輪端匹配連接一個啟動/發電機用于發動機的快速啟動和怠速停機。該啟動/發電機在本設計系統中用來控制發動機啟停和發電,不參與整車驅動,降低了控制系統的開發難度,提高了發動機的經濟性。
1.1.3混合四驅
汽車在行駛過程中,行駛路況復雜多變,在動力電池電量較高時,如果遇到整車急加速或其他需求功率較高的情況,汽車則進入四驅模式,此時由驅動電機輔助發動機驅動整車,兩套動力源同時為整車提供驅動力。
綜上所述,本文所設計整車結構如圖1所示。純電動后驅搭載了兩檔自動變速器,發動機前驅部分取消了原有的起動機,使用了啟動/發電機,目標車型可依據行駛路況自由選擇純電動后驅、發動機前驅及混合四驅模式。
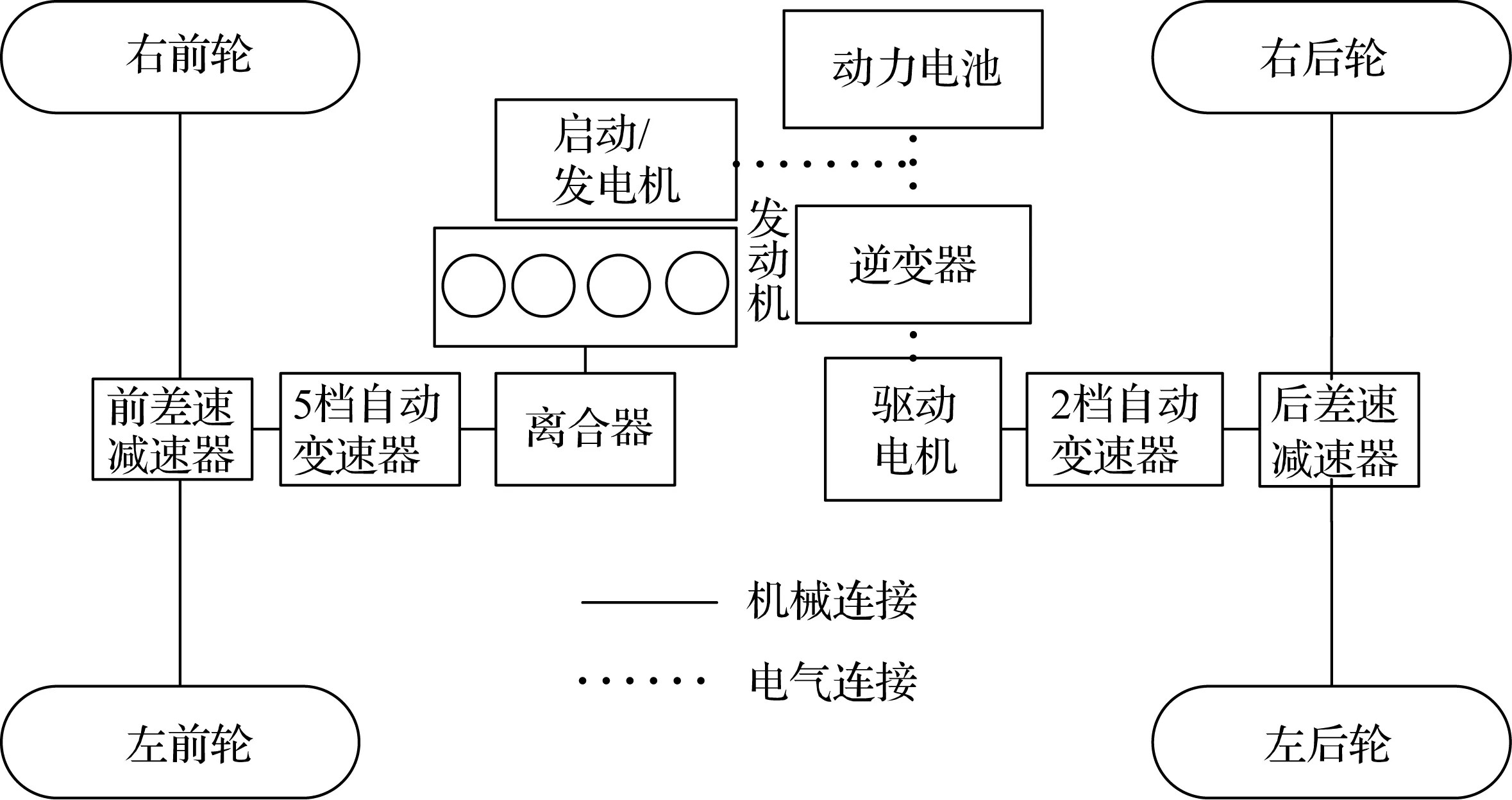
圖1 插電式適時四驅系統結構
1.2整車動力系統動力學分析
本文設計系統可以滿足整車在城市、郊區和高速公路行駛的要求,整車控制系統根據不同的行駛工況控制系統向車輪提供合適的驅動力,實現適時四驅驅動模式。其適時四驅驅動行駛模式及能量傳遞路線如圖2所示。
①圖2(a)為純電動后輪驅動,由后驅動電機提供動力驅動后輪,動力傳遞關系為:
Twheel=TM×igr×i0r。
(1)
車輪需求扭矩由驅動電機提供,經兩檔自動變速器和后差速減速器傳遞到后輪。純電動后輪驅動,動力電池電量較高,實現零排放經濟行駛。
②圖2(b)為發動機前輪驅動,由發動機單獨提供動力驅動前輪,動力傳遞關系為:
Twheel=Te×igf×i0f。
(2)
車輪需求扭矩由發動機提供,經五檔自動變速器和前差速減速器傳遞到前輪。發動機單獨前輪驅動,動力電池電量較低,增程行駛。發動機發出過多功率由啟動/發電機發電,維持動力電池電量。
③圖2(c)為混合四輪驅動,由發動機和驅動電機聯合提供動力驅動四輪,動力傳遞關系為:
Twheel=Te×igf×i0f+TM×igr×i0r。
(3)
發動機和驅動電機同時提供動力,經變速器和前后減速差速器分別傳遞到前后輪。四輪驅動,提高汽車性能,適應更多行駛工況。
④圖2(d)為制動能量回收模式:
-Twheel=TM×igr×i0r。
(4)
驅動電機作為發電機提供相應的負扭矩,吸收車輛部分動能轉化為電能補充動力電池,實現汽車制動能量回收。
式(1)~(4)中,Twheel為車輪的驅動力;TM為后驅動電機提供的驅動力;Te為發動機提供的驅動力;igf為5檔自動變速器的傳動比;igr為2檔自動變速器的傳動比;i0f為前主減速器的傳動比;i0r為后主減速器的傳動比。
通過兩套獨立的動力源分別驅動前后輪,既可以實現單獨的兩輪驅動也可以聯合四輪驅動,簡單方便的實現了整車的適時四輪驅動,同時也實現了制動能量的回收。

(a) 純電動后驅模式

(c) 混合四驅模式

(d) 制動能量回收模式
圖2目標車型能量傳遞流圖
Fig.2Power flow map of the target vehicle
整車基本參數和目標性能如表1和表2所示。

表1 整車基本參數

表2 目標性能指標
2整車參數匹配
動力部件的合理參數對于提高各部件之間的機械傳動效率,改善汽車在不同工況下行駛時的整車性能起著關鍵作用[15]。
2.1發動機與驅動電機選型
發動機功率的大小對整車動力性、燃油經濟性和排放性均有很大影響,驅動電機不僅要滿足純電動模式獨立驅動的性能要求,還要兼具回收制動能量的功能[16]。本文根據發動機單獨驅動、純電動和混合驅動時的設計要求進行匹配設計。
①通過最高車速確定動力部件的額定功率:

(5)
式中,Pe為額定功率,ηt為傳動系統總效率,m為汽車滿載質量,g為重力加速度,f為滾動阻力系數,Cd為空氣阻力系數,A為迎風面積,umax1為最高車速。
②通過車速在30 km/h時的爬坡度和0~100 km/h加速時間分別計算動力部件的最大功率:

(6)

(7)
式(6)~(7)中,pemax為滿足爬坡需求最大功率,pjmax為滿足加速時間需求最大功率,i為爬坡度,ua為爬坡車速,ut為汽車有靜止到加速終止的車速,t為汽車加速時間,k為時間常數。
③動力部件最大功率為應為:
Pmax=max(Pemax,Pjmax)。
(8)
2.1.1發動機參數的選取
根據公式(5)~(8),在發動機單獨工作時設計發動機最大功率,考慮汽車附件等,發動機最大功率應有5%~10%的余量。如圖3為所選發動機特性曲線及其最佳工作曲線,其中圖3(a)表示發動機輸出扭矩隨發動機轉速變化情況的發動機特性曲線,圖3(b)表示發動機最佳工作曲線,表明不同轉速與發動機輸出功率之間的關系。
2.1.2電機參數選取
根據公式(5)~(8)計算驅動電機單獨工作時的額定功率、峰值功率。在混合驅動模式下發動機和驅動電機聯合驅動汽車,此時整車的功率為發動機功率和電機功率之和,通過公式(9)和公式(10)計算驅動電機的峰值功率:
PMmax2=PMmax1-Pemax,
(9)
PMmax=max(PMmax1,PMmax2),
(10)
式中,PMmax1為純電動模式下驅動電機峰值功率,PMmax2為四驅模式下驅動電機峰值功率,PMmax為驅動電機峰值功率。
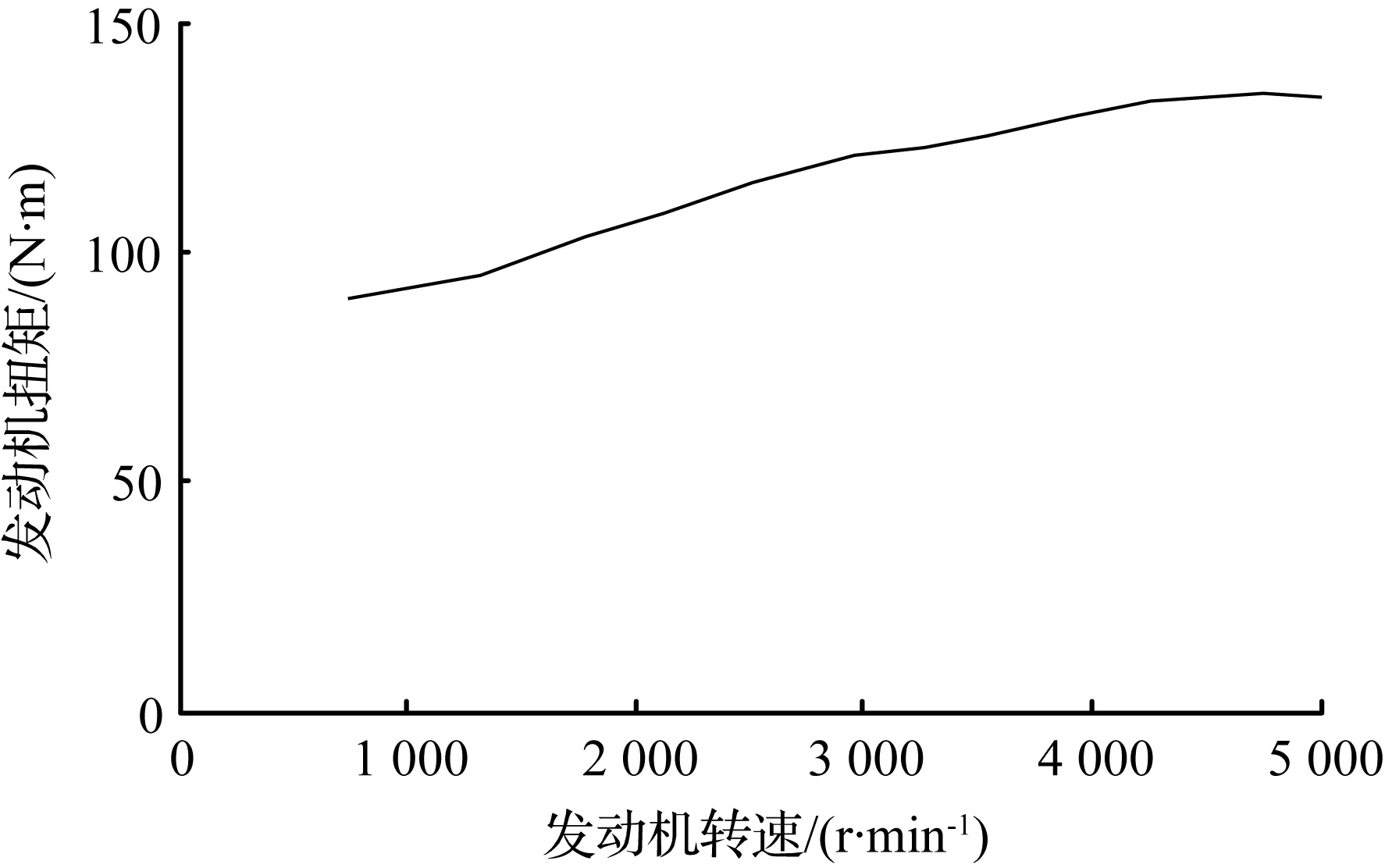
(a) 發動機特性曲線

(b) 發動機最佳工作曲線
圖3發動機特性曲線及最佳工作曲線
Fig.3Engine characteristic curve and Optimal Operating Line(OOL)
2.2啟動/發電機匹配
目標PHEV系統中啟動/發電機主要作用是起動發動機和發電,需要滿足以下條件:
①在增程模式下,發動機將過多的功率通過啟動/發電機發電補充給動力電池,以純電動平均行駛車速(45 km/h)所需功率為啟動/發電機的額定功率。
②啟動/發電機主要用于快速啟停發動機,因此應能保證在極短時間內將發動機啟動或怠速停機[17],其額定轉矩TGe應滿足:

(11)
式中,I為發動機轉動慣量,nid為發動機怠速轉速,ts為啟動時間。
2.3動力電池參數設計
動力電池在整車系統中影響著汽車純電動續駛里程、加速爬坡等能力[18],本文選取鋰電池作為系統動力電池,并進行參數設計。
①以60 km/h勻速行駛時需求功率和設計續駛里程作為動力電池容量的設計目標:

(12)
式中,Cb為電池額定容量;Pv為汽車以車速v勻速行駛的所需功率;U為電池組額定電壓;ηe為驅動電機的工作效率;ηDOD為電池的放電深度。
②分別以純電動后輪驅動下驅動電機的峰值功率和汽車續駛里程的要求確定動力電池的數目,通過公式(13)和公式(14)計算:

(13)
(14)
式中,Pbmax為單體鋰電池的最大輸出功率;ηe為驅動電機的效率;ηec為驅動電機控制器的效率;L為汽車的續駛里程;W為整車在單位里程所消耗能量;Cr為單體電池額定容量;Ur為單體電池電壓;Pa為整車從t1時刻行駛至t2時刻總的需求功率。
2.42檔自動變速器傳動比
考慮純電動直接驅動下的諸多問題,本設計中在驅動電機和車輪之間增加減速器和2檔自動變速器,提高純電動模式下驅動電機的性能。主減速器的傳動比i0r=3.0。
①由驅動電機的最高轉速要符合設計最高車速來確定最高檔位傳動系最大速比:

(15)
②根據最高車速和電機最高轉速下的輸出轉矩確定傳動系速比:

(16)
③通過最大爬坡度和電機的最大輸出扭矩來計算最低檔傳動系的最小傳動比:

(17)
經過以上計算,整車動力部件參數匹配結果如表3所示。

表3 動力部件參數匹配
3控制策略與動力系統模型開發
3.1目標車型整車控制策略開發
插電式適時四驅混合動力整車控制系統由發動機控制系統(ECU)、電機控制系統(MCU)、電池控制系統(BMS)和再生制動控制等組成。將車速、整車需求扭矩、需求功率、駕駛員意圖信號及電池荷電狀態(State of Charge, SOC)作為輸入信號,識別整車行駛模式并計算各動力部件所需輸出扭矩。圖4為搭建的模式識別示意圖:
①汽車處于靜止狀態時,處于機械制動模式,此時如果動力電池SOC較低,則進行外接充電;
②當汽車開始行駛,整車需求功率大于零且SOC大于最低限時,汽車進入純電動后輪驅動模式。汽車在純電動后輪驅動行駛時如果急加速或進入高速大功率行駛時,汽車將進入四輪驅動模式;
③在動力電池SOC低于最低下限時,汽車進入增程模式。在動力電池SOC相對較高時,汽車首先進入低電量純電動后輪驅動模式。動力電池SOC繼續減小則汽車進入發動機前輪驅動模式,當發動機發出功率大于汽車行駛所需功率時,汽車將進入發動機前輪驅動充電模式;
④在汽車行駛過程中,制動或者滑行時,汽車將進入制動能量回收模式。
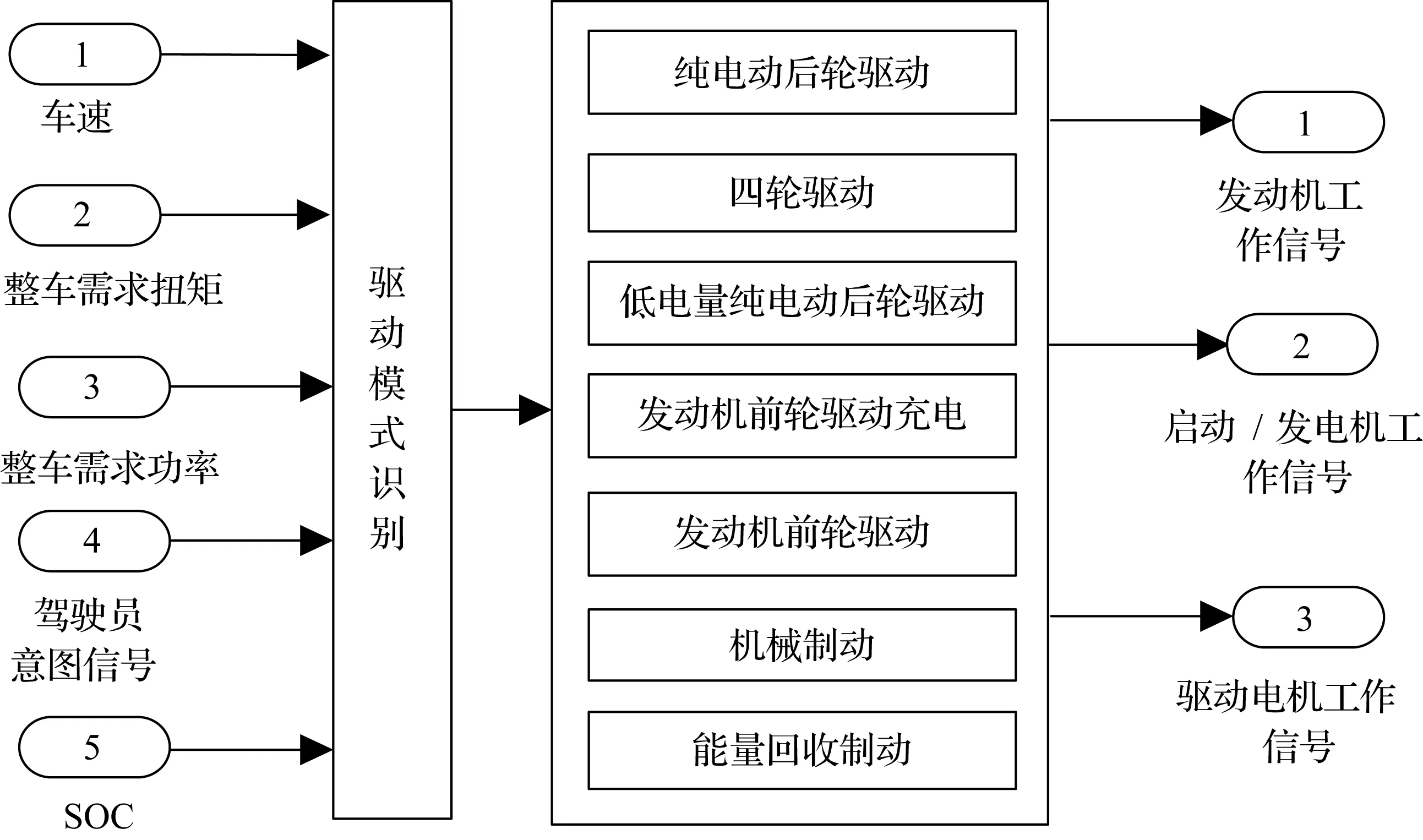
圖4 驅動模式識別示意圖
根據不同驅動模式下動力部件運行狀況的不同及汽車行駛需要扭矩,對各動力部件進行扭矩分配。
①發動機扭矩確定
發動機的輸出扭矩是通過發動機的最佳工作曲線確定的:
Te=f(eng_spd,eng_OOL)。
(18)
②驅動電機扭矩確定
驅動電機用于純電動后輪驅動和制動能量回收模式時的需求扭矩由公式(19)確定,用于四輪混合驅動時的需求扭矩由公式(20)確定。

(19)

(20)
③啟動/發電機扭矩確定
啟動/發電機扭矩是用來啟停發動機或調整發動機輸出扭矩的,其輸出扭矩為:
Tfc=Tf-Te。
(21)
式(18)~(21)中,eng_spd為發動機設計轉速,eng_OOL為發動機最佳工作曲線,Tfc為啟動/發電機輸出扭矩,Tf為啟動/發電機控制器調節扭矩。
3.2目標車型整車動力系統開發
利用AVL Cruise軟件搭建完整的插電式適時四驅混合動力系統模型,如圖5,將各模塊通過機械和電氣連接起來。輸入所搭建系統各模塊參數,并添加計算任務。通過API模塊將MATLAB/Simulink所搭建的控制策略放入Cruise中進行聯合仿真。

圖5 Cruise和MATLAB聯合仿真模型
4仿真結果分析
4.1模式切換分析
為了模擬目標車型所面臨的各種行駛環境,選擇Ftp72循環工況并對所搭建插電式適時四驅混合動力系統進行仿真。四驅動力系統車速以及各工作模式切換過程如圖6所示。

圖6 車輛車速及模式切換圖
在剛開始運行時,動力電池SOC充足,汽車完全依靠電機驅動;在急加速時,汽車進入四驅模式;動力電池SOC不足后汽車進入增程驅動模式,在此模式下動力電池SOC相對較高時為低電量純電動后輪驅動,相對較低時則完全由發動機驅動,在汽車需求功率較小,發動機多余一部分功率用于發電即為發動機前輪驅動充電模式;當汽車需求功率較高時,發動機功率完全用來驅動整車行駛即為發動機前輪驅動。在整個過程中不僅實現驅動模式同時也實現了汽車的制動能量回收模式。
圖6中由于汽車頻繁加速和制動出現模式頻繁跳轉情況,此時為純電動驅動模式,在制動時符合本設計制動能量回收模式,因此汽車頻繁跳轉于純電動驅動和制動能量回收模式。
①后輪驅動
在后輪驅動模式下,發動機和啟動/發電機均不工作,所發出扭矩為零,只有驅動電機作為動力源提供動力,輸出扭矩(動力電池SOC充足)和動力電池SOC變化如圖7所示,驅動電機的扭矩為正時驅動汽車行駛,動力電池SOC下降,驅動電機的扭矩為負值時汽車處于制動能量回收模式,此時動力電池SOC值會稍微上升。

(a) 驅動電機扭矩曲線
(b) 電池SOC曲線
圖7純電動驅動電機扭矩及電池荷電狀態(SOC)曲線
Fig.7Pure electric drive motor torque and battery state of charge (SOC) curve
②前輪驅動
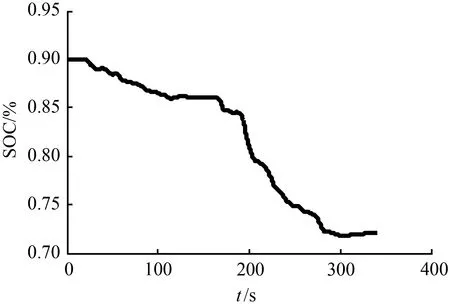
如圖8所示,t=20~128 s時,車輛工作在低電量純電動后輪驅動模式(A階段),電池SOC從29%降到了23%,此時只有驅動電機提供驅動扭矩;t=160~190 s時,車輛工作在發動機前輪驅動充電模式(B階段),在t=165.3 s時,啟動/發電機輸出一個70 N·m的扭矩用來啟動發動機,發動機啟動后輸出扭矩來驅動汽車,多余發動機功率用于驅動啟動/發電機發電;t=190~253 s時為發動機前輪驅動模式(C階段),發動機提供功率完全用于驅動汽車,驅動電機和啟動/發電機不工作;D階段和E階段分別與B階段和A階段重復,在此不再贅述,整個過程SOC由29%下降到24.59%。
③四輪驅動
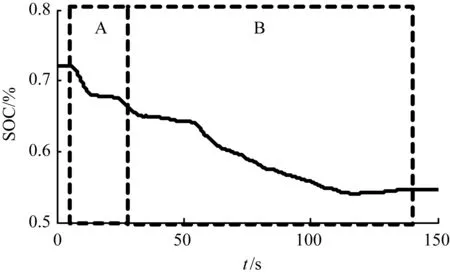
如圖9所示,在t=5~23 s時為四輪驅動模式(A階段),汽車由驅動電機啟動,由于急加速需求功率增大,啟動/發電機提供瞬時正扭矩快速啟動發動機,此時驅動電機輔助提供動力;在t=23~145 s時為純電動后輪驅動模式(B階段),汽車行駛不再滿足四驅行駛條件,啟動/發電機提供負扭矩使發動機快速停機,由驅動電機提供驅動扭矩,進入純電動后輪驅動模式。

(a) 驅動電機扭矩曲線

(b) 發動機扭矩曲線

(c) 啟動/發電機扭矩曲線

(d) 電池SOC曲線
圖8前輪驅動動力部件扭矩及電池SOC曲線
Fig.8Front wheel drive power component torque and battery SOC curve

(a) 驅動電機扭矩曲線

(b) 發動機扭矩曲線

(c) 啟動/發電機扭矩曲線
(d) 電池SOC曲線
圖9四輪驅動動力部件扭矩及電池SOC曲線
Fig.9Four wheel drive power component torque and battery SOC curve
4.2動力性分析
在AVL Cruise中分別添加最高車速、加速和爬坡性能計算任務,驗證整車動力性能,通過表4仿真數據結果看出,無論是前輪驅動、后輪驅動還是四輪驅動均滿足設計要求,四驅模式下汽車爬坡達68.33%。圖10為四輪驅動與單軸驅動加速性能比較,在相同的駕駛環境下,四輪驅動模式下汽車加速性能明顯優于單軸驅動模式,百公里加速時間僅為6.22 s,具有更好的加速性能。

表4 動力性仿真結果

圖10 適時四驅加速性能曲線Fig.10 Real time acceleration curve
在本文中,還將此車的動力性與傳統四驅汽車及四驅混合動力汽車的性能進行了比較(表5);在本設計系統的基礎上增加發動機起動機、去除啟動/發動機及兩檔自動變速器,采用分動器系統改為傳統四驅汽車(構型1);以前輪為發動機驅動,后輪為電機驅動改為一般四驅混合動力汽車(構型2)。分別建立以上四驅系統的模型并進行動力性仿真,仿真結果如表5所示。
如表5所示,構型1的加速時間為9.95 s,而此動力性的獲取是以發動機功率的提升為代價的,在本設計中所選發動機為70 kW,構型1所選發動機功率增至90 kW;對于構型2,加速時間為12.4 s,是三種構型中加速時間最長的,這是由于后輪驅動時,電機直接將動力經主減速器傳到車輪,未經過變速器進行增扭減速,且加速起始階段發動機不參與驅動,甚至加速性能弱于構型1;本設計中的四輪驅動系統增加兩檔自動變速器后,在最大爬坡度和百公里加速性能上明顯優于對比車型,相比于構型2分別提升42.06%和46.6%,同時相對于傳統四驅汽車,四驅混合動力汽車具有純電動行駛的能力,具備更加良好的節能減排意義。

表5 動力性仿真比較
4.3經濟性分析
在經濟性的仿真中主要對發動機油耗、動力電池電量消耗、百公里能量回收及續駛里程等進行研究。
本設計與其他構型最大的不同便是增加了兩檔自動變速器,因此,首先研究構型2與本設計中驅動電機運行效率和純電動模式下續航里程的影響。選擇Ftp72循環工況對整車經濟性能仿真,圖11為前500 s工況下兩種構型的電機驅動效率比較,在大部分工況下(如圖11中圓形實線所標注區域),直接驅動電機效率低于變速后驅動;而在矩形虛線所標注區域內,由于此時車速大于80 km/h,直接驅動時電機效率略高,但在整個行駛過程中,直接驅動電機平均效率為76.55%,增加兩檔變速器后提升為86.23%,且由于汽車純電動行駛更多用于城市內中低速行駛,增加兩檔變速器更能有效提升經濟性。
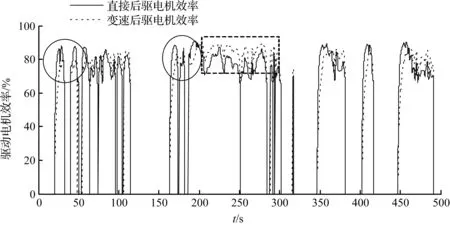
圖11 驅動電機效率

圖12 純電動模式續駛里程Fig.12 Pure electric driving range
圖12為汽車以60 km/h勻速純電動后輪驅動行駛,無變速器直接驅動和增加兩檔變速器后汽車續駛里程比較,結果表明增加兩檔變速器后動續駛里程較無變速器直接驅動情況下提升11.49%。
為進一步研究經濟性,將構型1發動機選取為90 kW,構型2與本設計均進行制動能量回收,在Cruise中進行經濟性仿真,同時以當前當地油價5.94元/L、電價0.71元/(kW·h)計算成本。從表6中可以看出,本設計設置啟動/發電機對發動機進行快速啟停控制后,較構型2的百公里油耗減少0.16 L,百公里耗電也由于驅動電機效率的提升減少4.82 kW,最終本設計四驅混合動力汽車系統較構型1節省35.43%使用成本。

表6 經濟性仿真結果比較
4.4討論
通過以上仿真分析可以發現,本設計混合動力汽車與構型1相比發動機功率配置更小,在動力性和經濟性上表現更加優越;與構型2相比,引入啟動/發電機對發動機快速啟停進行控制、增加兩檔自動變速器提高了驅動電機在中低速行駛時的工作效率,進一步提升了四驅混合動力汽車的性能,同時節省了汽車的使用成本。因此,此類適時四驅系統對PHEV整車性能的提升有著重大的理論意義與實踐意義,為此類PHEV的研發提供了必要的理論和技術基礎。
5結語
本文根據插電式混合動力汽車的特點設計開發一種新型適時四驅混合動力汽車系統,具備啟動/發電機和兩檔變速系統,通過匹配分析計算可知,所匹配動力部件滿足汽車行駛性能要求,所搭建模式切換狀態流實現汽車在不同工況行駛工作模式的順利切換,并且各動力部件扭矩分配合理。仿真結果可以看出,在前輪和后輪驅動滿足汽車普通行駛的基礎上,混合四驅模式使汽車在動力性能上有較大的提升,更能適應復雜的行駛環境;發動機的快速啟停控制和電機效率的提高也使純電動情況下汽車續駛里程提升11.49%,使用成本降低35.43%。
參考文獻:
[1]張長令.全面推進新能源汽車產業發展的思考[J]. 中國產業經濟動態, 2015 (20): 35-39.
[2]WANG T, CASSANDRAS C G, POURAZARM S.Optimal motion control for energy-aware electric vehicles[J]. Control Engineering Practice, 2015, 38: 37-45.
[3]KIN D, HWANG S, KIM H.Vehicle stability enhancement of four-wheel-drive hybrid electric vehicle using rear motor control[J]. IEEE Transactions on Vehicular Technology, 2008, 57(2): 727-735.
[4]張文超, 周兵, 呂緒寧.四驅型混合動力汽車前向仿真模型開發[J]. 機械科學與技術, 2014,33(6):913-917.
[5]莫愁,陳吉清,蘭鳳崇.四驅混合動力汽車動力系統匹配與控制策略研究[J]. 汽車工程學報, 2013, 3(3):199-204.
[6]RAGHEB H, AYDIN M, El-GINDY M, et al.Comparison of gradability performance of fuel cell hybrid electric and internal-combustion engine vehicles[J]. Journal of Power Sources, 2013, 221: 447-454.
[7]邱利宏,錢立軍,程偉.插電式四驅混合動力轎車控制策略研究[J]. 汽車工程學報, 2015, 5(1): 66-73.
[8]KANG J, CHOI W, KIM H.Development of a control strategy based on the transmission efficiency with mechanical loss for a dual mode power split-type hybrid electric vehicle[J]. International Journal of Automotive Technology, 2012, 13(5): 825-833.
[9]徐悅,郭俊,張雄,等.電動四驅混合動力車的模式切換平穩性研究[J]. 北京汽車, 2014(1):17-19,23.
[10]王杰,張舟云,貢俊.純電驅動電動汽車用動力傳動系統方案對比分析[J]. 微特電機, 2012, 40(10): 52-54, 57.
[11]何志剛, 周成, 盤朝奉, 等.基于粒子群算法純電動汽車傳動系統參數的優化[J]. 廣西大學學報(自然科學版), 2015, 40(5): 1092-1101.
[12]吳瓊, 李衛兵, 袁子紅, 等.怠速轉速對整車燃油經濟性的影響[J]. 車用發動機, 2015 (4): 67-69.
[13]VORONIN S G, SOGRIN A I, SHABUROV P O, et al.A starter-generator for a diesel power plant[J]. Russian Electrical Engineering, 2013, 84(10): 556-559.
[14]姜嬌龍,趙治國.混合動力發動機快速起動過程模擬與分析[J]. 機械與電子, 2013, 2013(5): 31-35.
[15]萬帆, 傅春耘, 蓋江濤, 等.插電式混合動力汽車動力傳動系統的參數匹配及仿真[J]. 重慶理工大學學報(自然科學版), 2015, 29(6): 19-26.
[16]初敏, 高松, 楊坤, 等.純電動客車最佳制動能量回收控制策略研究[J]. 廣西大學學報 (自然科學版), 2015,40(2):357-366.
[17]王剛毅.插電式混聯四驅混合動力轎車動力系統匹配設計及仿真[D]. 西安:長安大學, 2014.
[18]肖蕙蕙, 王志強, 李山, 等.電動汽車動力鋰離子電池建模與仿真研究[J]. 電源學報, 2012(1): 41-44.
(責任編輯梁健)
收稿日期:2016-01-08;
修訂日期:2016-02-26
基金項目:山東省自然科學基金資助項目(ZR2015EL025;ZR2015PE020;ZR2015EM054)
通訊作者:高松(1965—),山東濰坊人,山東理工大學教授,博士生導師,工學博士;E-mail:gs6510@163.com。
doi:10.13624/j.cnki.issn.1001-7445.2016.0684
中圖分類號:U469.72
文獻標識碼:A
文章編號:1001-7445(2016)03-0684-14
Powertrain parameters design and system control simulation for a new type real time 4WD PHEV
MA Chao, CHEN Mei-qi, YANG Kun, GAO Song
(School of Transportation and Vehicle Engineering, Shandong University of Technology, Zibo 255049, China)
Abstract:According to the vehicle working characteristics and various driving requirements, this study designs and develops one new type plug-in real time hybrid electric powertrain system to further improve the capability of Plug-in Hybrid Electric Vehicle (PHEV) when facing various road conditions. This system adopts the Starter-Generator and pure electric driving mode with two speed transmission. Simple configuration design and powertrain dynamic analysis are performed. Based on the design requirements, the full vehicle control strategy is developed. In order to verify its performance, the powertrain model of the target PHEV is developed by using AVL Cruise. The full vehicle control strategy is developed by using MATLAB/Simulink, where the state flow is used to construct the mode state change algorithm. The co-simulation results show that the powertrain parameters matching and control strategy meets the design requirements, and one hundred kilometers acceleration time is 6.22 s. Compared to the PHEV configuration without two speed transmission, the application of the starter/generator and two speed transmission makes the pure electric driving range increased to 11.49% and finally reduces the using cost of 35.43%. This research provides a complete theory and technique for the design of similar four wheel driving PHEV system, which has a key theory and social meaning for the development of PHEV.
Key words:hybrid vehicles; matching; real-time 4WD; starter/generator; two speed pure electric driving; control strategy; simulation analysis
引文格式:馬超,陳美奇,楊坤,等.新型適時四驅PHEV系統匹配與控制仿真[J].廣西大學學報(自然科學版),2016,41(3):684-697.
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
汽車與安全(2019年9期)2019-11-22 09:48:03
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
汽車與新動力(2015年1期)2015-02-27 12:11:01
決策探索(2014年21期)2014-11-25 12:29:50
汽車與新動力(2014年2期)2014-02-27 12:10:15
汽車與新動力(2013年5期)2013-03-11 16:08:17
燃氣渦輪試驗與研究(2010年4期)2010-04-16 03:54:22